Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (8): 1299-1308.doi: 10.19562/j.chinasae.qcgc.2023.08.001
Special Issue: 智能网联汽车技术专题-规划&决策2023年
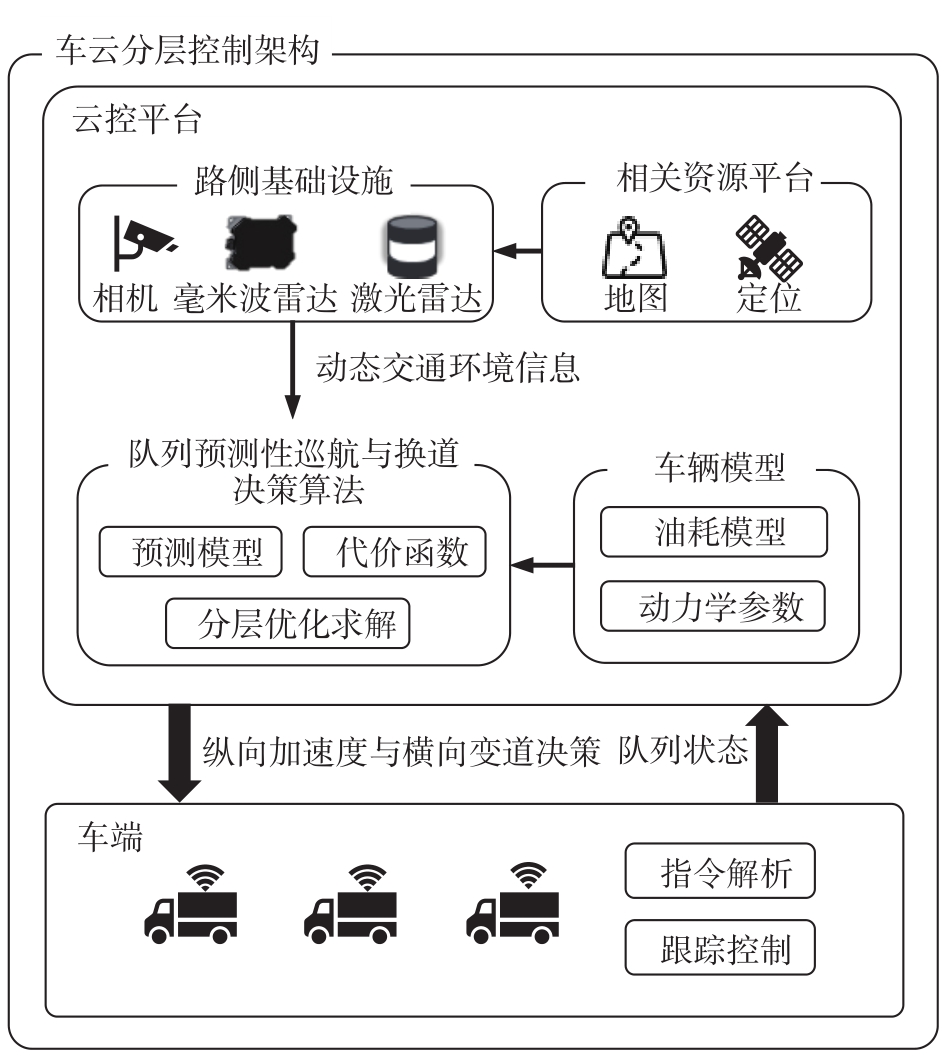
Run Mei1,Duanfeng Chu2,Bolin Gao3( ),Keqiang Li3,Wei Cong3,Chaoyi Chen3
),Keqiang Li3,Wei Cong3,Chaoyi Chen3
Received:2023-01-12
Revised:2023-02-12
Online:2023-08-25
Published:2023-08-17
Contact:
Bolin Gao
E-mail:gaobolin@tsinghua.edu.cn
Run Mei,Duanfeng Chu,Bolin Gao,Keqiang Li,Wei Cong,Chaoyi Chen. Predictive Cruise and Lane-Changing Decision for Platoon Based on Cloud Control System[J].Automotive Engineering, 2023, 45(8): 1299-1308.

"

"


"

"
| 质量m | 6.7 t |
|---|---|
| 车辆长度L | 7 m |
| 轮胎半径r | 0.376 m |
| 迎风面积A | 5.1 m2 |
| 空气阻力系数CD | 0.65 |
| 滚动阻力系数f | 0.007 6 |
| 发动机转速范围ωe | 749~3 200 r/min |
| 发动机转矩范围Te | -325~380 N·m |
| 主减速器传动比i0 | 4.33 |
| 传动比ig | [5.9,3.365,2.129.1.518,1,0.783] |
| 传动效率η0 | 0.915 |
"
| 环境车跟驰模型 | IDM[ |
|---|---|
| 环境车换道模型 | LC2013[ |
| 环境车加速度范围arange | -4.5~2.6 m/s2 |
| 左侧车道环境车初始速度vl0 | 25 m/s |
| 右侧车道环境车初始速度vr0 | 15 m/s |
"
| 队列车辆数量n | 3 |
|---|---|
| 队列车辆间距d | 18 m |
| 预测时域Np | 30 |
| 控制时域Nc | 10 |
| 采样间隔ΔT | 0.5 s |
| 期望速度vdes | 20 m/s |
| 安全车头时距 | 1.5 s |
| 安全碰撞时间 | 3 s |
| 常数α | 10 |
| 常数β | 0.5 |
"
| 跟车权重ωf | 100 |
|---|---|
| 换道权重ωc | 1 500 |
| 油耗权重ωo | 5 000 |
| 速度权重ωv | 2 |
| 加速度权重ωa | 100 |
| 车道权重ωl | 1 |
"
| 工况编号 | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| 交通流量/(辆·h-1) | 100 | 150 | 200 | 250 | 300 |
| 队列进入时间/s | 54 | 36 | 27 | 21.5 | 20 |

"


"


"


"


"

"
| 状态量 | 预测结果 | 实际结果 |
|---|---|---|
| CPV位置/m | 230 | 229.1 |
| CPV速度/(m·s-1) | 15 | 14.9 |
| CPV所在车道 | 0 | 0 |
| TPV位置/m | 380 | 378.7 |
| TPV速度/(m·s-1) | 25 | 24.9 |
| TPV所在车道 | 1 | 1 |
"
| 工况 | 算法 | 巡航 | 换道 | ||
|---|---|---|---|---|---|
| 碰撞时间倒数均值/s-1 | 降低百分比/% | 碰撞时间倒数均值/s-1 | 降低百分比/% | ||
| 工况1 | Baseline | 0.018 7 | 0.014 58 | ||
| CPPCLC | 0.016 6 | 11.619 1 | 0.014 64 | -0.397 7 | |
| 工况2 | Baseline | 0.016 1 | 0.016 6 | ||
| CPPCLC | 0.013 4 | 17.205 2 | 0.015 8 | 4.662 | |
| 工况3 | Baseline | 0.015 7 | 0.018 1 | ||
| CPPCLC | 0.014 3 | 9.056 | 0.017 8 | 1.786 1 | |
| 工况4 | Baseline | 0.015 7 | 0.019 1 | ||
| CPPCLC | 0.002 8 | 81.907 9 | 0.009 7 | 49.145 1 | |
| 工况5 | Baseline | 0.009 1 | 0.012 8 | ||
| CPPCLC | 0.000 8 | 91.207 9 | 0.017 6 | -38.143 6 | |
| 平均值 | Baseline | 0.015 1 | 0.016 2 | ||
| CPPCLC | 0.009 6 | 42.20 | 0.015 1 | 3.41 | |
"
| 工况 | 算法 | 百公里油耗/L | 节油率/% |
|---|---|---|---|
| 工况1 | Baseline | 11.322 5 | |
| CPPCLC | 11.183 6 | 1.226 5 | |
| 工况2 | Baseline | 11.493 6 | |
| CPPCLC | 11.358 4 | 1.175 9 | |
| 工况3 | Baseline | 11.866 0 | |
| CPPCLC | 11.678 8 | 1.576 9 | |
| 工况4 | Baseline | 12.131 0 | |
| CPPCLC | 11.997 5 | 1.100 5 | |
| 工况5 | Baseline | 12.182 1 | |
| CPPCLC | 12.058 7 | 1.012 5 | |
| 平均值 | Baseline | 11.799 | |
| CPPCLC | 11.655 | 1.22 |
"
| 工况 | 算法 | 平均速度/ (m·s-1) | 速度提升 百分比/% |
|---|---|---|---|
| 工况1 | Baseline | 19.460 5 | |
| CPPCLC | 19.487 3 | 0.138 1 | |
| 工况2 | Baseline | 19.385 7 | |
| CPPCLC | 19.439 4 | 0.277 4 | |
| 工况3 | Baseline | 19.230 9 | |
| CPPCLC | 19.231 1 | 0.001 1 | |
| 工况4 | Baseline | 18.944 8 | |
| CPPCLC | 19.271 9 | 1.726 5 | |
| 工况5 | Baseline | 18.873 5 | |
| CPPCLC | 19.256 2 | 2.027 4 | |
| 平均值 | Baseline | 19.179 | |
| CPPCLC | 19.337 | 0.83 |
"
| 工况 | 算法 | 加速度波动/(m2·s-4) | 加速度波动降低百分比/% |
|---|---|---|---|
| 工况1 | Baseline | 0.011 8 | |
| CPPCLC | 0.005 1 | 56.529 1 | |
| 工况2 | Baseline | 0.012 4 | |
| CPPCLC | 0.006 1 | 51.094 4 | |
| 工况3 | Baseline | 0.015 4 | |
| CPPCLC | 0.009 6 | 37.553 6 | |
| 工况4 | Baseline | 0.021 7 | |
| CPPCLC | 0.009 7 | 55.454 3 | |
| 工况5 | Baseline | 0.019 5 | |
| CPPCLC | 0.01 | 48.583 8 | |
| 平均值 | Baseline | 0.016 2 | |
| CPPCLC | 0.008 1 | 49.87 |
| 1 | WEI S, ZOU Y, ZHANG X, et al. An integrated longitudinal and lateral vehicle following control system with radar and vehicle-to-vehicle communication[J]. IEEE Transactions on Vehicular Technology, 2019, 68(2): 1116-1127. |
| 2 | 郑洋. 基于四元素架构的车辆队列动力学建模与分布式控制[D]. 北京:清华大学, 2015. |
| ZHENG Y. Dynamic modeling and distributed control of vehicular platoon under the four-component framework[D]. Beijing: Tsinghua University, 2015. | |
| 3 | SHLADOVER S E, DESOER C A, HEDRICK J K, et al. Automated vehicle control developments in the PATH program[J]. IEEE Transactions on Vehicular Technology, 1991, 40(1): 114-130. |
| 4 | 李正磊,褚端峰,贺宜,等. 考虑时滞的协作式自动驾驶车队的纵向控制方法[J]. 汽车安全与节能学报, 2020, 11(2): 182-188. |
| LI Z L, CHU D F, HE Y, et al. Longitudinal control method of cooperative autopilot vehicle platooning considering time delays[J]. Journal of Automotive Safety and Energy, 2020, 11(2): 182-188. | |
| 5 | WANG P, DENG H, ZHANG J, et al. Model predictive control for connected vehicle platoon under switching communication topology[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(7): 7817-7830. |
| 6 | GUO G, LI D. Adaptive sliding mode control of vehicular platoons with prescribed tracking performance[J]. IEEE Transactions on Vehicular Technology, 2019, 68(8): 7511-7520. |
| 7 | LATTEMANN F, NEISS K, TERWEN S, et al. The predictive cruise control-a system to reduce fuel consumption of heavy duty trucks[J]. SAE Transactions, 2004: 139-146. |
| 8 | TURRI V, BESSELINK B, JOHANSSON K H. Cooperative look-ahead control for fuel-efficient and safe heavy-duty vehicle platooning[J]. IEEE Transactions on Control Systems Technology, 2016, 25(1): 12-28. |
| 9 | ZHAI C, LUO F, LIU Y, et al. Ecological cooperative look-ahead control for automated vehicles travelling on freeways with varying slopes[J]. IEEE Transactions on Vehicular Technology, 2018, 68(2): 1208-1221. |
| 10 | GUO G, WANG Q. Fuel-efficient en route speed planning and tracking control of truck platoons[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 20(8): 3091-3103. |
| 11 | 李克强,常雪阳,李家文,等. 智能网联汽车云控系统及其实现[J]. 汽车工程, 2020, 42(12): 1595-1605. |
| LI K Q, CHANG X Y, LI J W, et al. Cloud control system for intelligent and connected vehicles and its application[J]. Automotive Engineering, 2020, 42(12): 1595-1605. | |
| 12 | 赵菲,王建,张天雷,等. 云控场景下车辆队列的模型预测控制方法[J]. 汽车工程, 2022, 44(2): 179-189. |
| ZHAO F, WANG J, ZHANG T L, et al. Model predictive control method for vehicle platoon under cloud control scenes[J]. Automotive Engineering, 2022, 44(2): 179-189. | |
| 13 | LI S Y, WAN K K, GAO B L, et al. Predictive cruise control for heavy trucks based on slope information under cloud control system[J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 812-826. |
| 14 | LOPEZ P A, BEHRISCH M, BIEKER-WALZ L, et al. Microscopic traffic simulation using sumo[C]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC), 2018: 2575-2582. |
| 15 | 聂建强. 高速公路车辆自主性换道行为建模研究[D]. 南京:东南大学, 2017. |
| NIE J Q. Research on modeling discretionary lane-changing behaviore of vehicles in freeway[D]. Nanjing: Southeast University, 2017. |
| [1] | Jizheng Liu,Zhenpo Wang,Fengchun Sun,Lei Zhang. Research on Delay Compensation Control for Heterogeneous Connected and Automated Vehicle Platoons [J]. Automotive Engineering, 2023, 45(9): 1573-1582. |
| [2] | Lijun Qian,Chen Chen,Jian Chen,Xinyu Chen,Chi Xiong. Discrete Platoon Control at an Unsignalized Intersection Based on Q-learning Model [J]. Automotive Engineering, 2022, 44(9): 1350-1358. |
| [3] | Manjiang Hu,Lingkun Bu,Hongmao Qin,Yan Zhou,Yougang Bian,Ning Sun,Xunjia Zheng. Modeling and Cooperative Control of Mixed Vehicle Platoon Under Multi-time Delay [J]. Automotive Engineering, 2022, 44(9): 1359-1371. |
| [4] | Pengfei Li,Yugong Luo,Chang Liu,Weiwei Kong. Control Strategies Design of Intelligent and Connected Vehicle Platoon Under Emergency Conditions [J]. Automotive Engineering, 2022, 44(3): 299-307. |
| [5] | Fei Zhao,Jian Wang,Tianlei Zhang,Li Wang,Deyi Li. Model Predictive Control Method for Vehicle Platoon Under Cloud Control Scenes [J]. Automotive Engineering, 2022, 44(2): 179-189. |
| [6] | Xiujian Yang,Xinyu Yin,Jin Gao. Interference Suppression Characteristics of Vehicle Platoon with Periodic Type Control Structure [J]. Automotive Engineering, 2022, 44(12): 1834-1843. |
| [7] | Lijun Qian,Jian Chen,Bing Wu,Liang Xuan,Chen Chen,Liangliang Chen. Eco⁃driving Control for Hybrid Electric Vehicle Platoon with Consideration of Driver Operation Error [J]. Automotive Engineering, 2021, 43(7): 1037-1045. |
| [8] | Yang Liu,Changfu Zong,Hongyu Zheng,Xiaojian Han,Dong Zhang,Kaku Chuyo. Two⁃dimensional Tracking Control Algorithm for Vehicle Platoon Based on Reference Vector Field [J]. Automotive Engineering, 2021, 43(7): 962-970. |
| [9] | Xiujing Gao,Yulin Ma,Sugimachi Toshiyuki,Hongwu Huang. Lateral Coupling Model of Automatic Platooning Based on Vehicle to Vehicle Communication [J]. Automotive Engineering, 2021, 43(12): 1745-1751. |
| [10] | Ma Fangwu, Wang Jiawei, Yang Yu, Shen Yucheng, Liu Zhenze. Research on Networked-vehicle Cooperative Platoon Control System [J]. Automotive Engineering, 2020, 42(7): 860-866. |
| [11] | Dai Wentong, Li Qiliang, Li Zhuoming, Chang Yifei, Yang Zhigang. Investigation into Bonnet Aerodynamic Characteristics of Follower Vehicle in Two-vehicle Platoon at Different Reynolds Numbers [J]. Automotive Engineering, 2020, 42(5): 593-599. |
| [12] | Wang Xuetong, Luo Yugong, Jiang Fachao, Yu Jie. Multi-target Control for Heterogeneous Platoon ofBattery Electric Commercial Vehicle [J]. Automotive Engineering, 2020, 42(4): 505-512. |
| [13] | Yang Xiujian, Li Jinyu. Coordinated Control of Vehicular Platooning Based on Nonlinear Model Predictive Control [J]. Automotive Engineering, 2020, 42(2): 184-190. |
| [14] | Li Keqiang, Chang Xueyang, Li Jiawen, Xu Qing, Gao Bolin, Pan Jian. Cloud Control System for Intelligent and Connected Vehicles and Its Application [J]. Automotive Engineering, 2020, 42(12): 1595-1605. |
| [15] | Shi Jia, Luo Yugong, Qi Yunlong, Li Keqiang. A Model-based Description Method for Key Performance Indicators of DSRC System in Vehicle Platoons [J]. Automotive Engineering, 2020, 42(11): 1449-1457. |