Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (9): 1587-1599.doi: 10.19562/j.chinasae.qcgc.2024.09.006
Lijun Qian1( ),Jian Chen1,Feng Zhao2,Xinyu Chen1,Liang Xuan1
),Jian Chen1,Feng Zhao2,Xinyu Chen1,Liang Xuan1
Received:2024-03-16
Revised:2024-04-14
Online:2024-09-25
Published:2024-09-19
Contact:
Lijun Qian
E-mail:qianlijun66@163.com
Lijun Qian,Jian Chen,Feng Zhao,Xinyu Chen,Liang Xuan. Research on Fast Stochastic Model Predictive Control-Based Eco-Driving Strategy for Connected Mixed Platoons[J].Automotive Engineering, 2024, 46(9): 1587-1599.

"

"
"
| 参数 | κ/s-1 | V1/(m·s-1) | V2/(m·s-1) | C1/m-1 | C2 | lveh/m |
|---|---|---|---|---|---|---|
| 数值 | 0.85 | 6.75 | 7.91 | 0.13 | 1.57 | 5 |
"
| 参数 | α | β1 | β2 | d1 | d2 | d3 |
|---|---|---|---|---|---|---|
| 数值 | 0.666 | 0.072 | 0.034 4 | 0.269 | 0.017 1 | 0.000 672 |

"

"

"

"

"


"
"
| 参数 | 数值 |
|---|---|
| 采样时间/s | 0.5 |
| 预测时域/s | 3 |
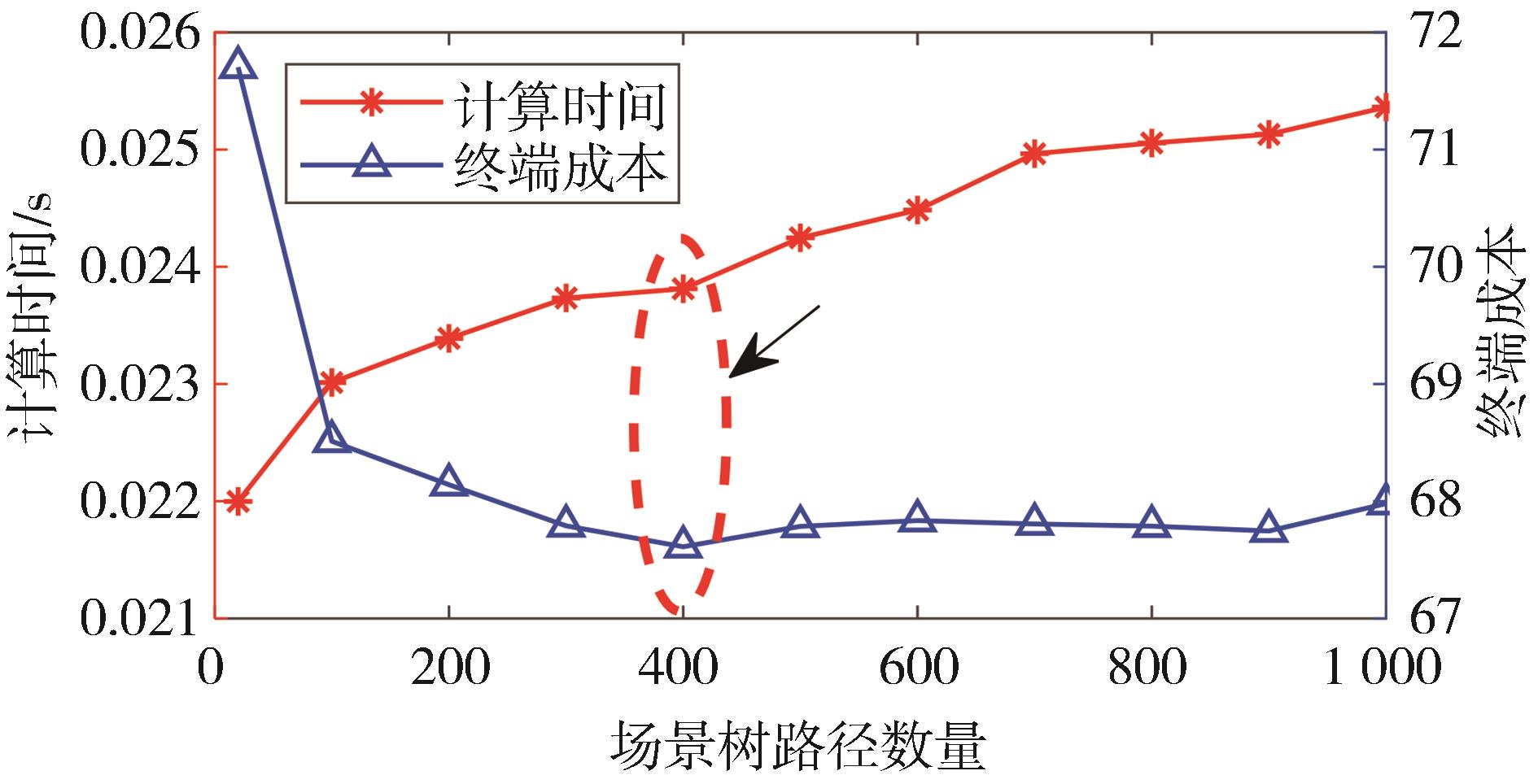
| 路径数量 | 400 |
| 权重系数ω1 | 20 |
| 权重系数ω2 | 5 000 |
| 权重系数ω3 | 500 |
"
| 参数 | 数值 |
|---|---|
| 整备质量/kg | 1 680 |
| 迎风面积/m2 | 2.25 |
| 空气阻力系数 | 0.3 |
| 滚动阻力系数 | 0.01 |
| 最高车速/(m·s-1) | 13.89 |
| 最低车速/(m·s-1) | 0 |
| 最大加速度/(m·s-2) | 3 |
| 最大减速度/(m·s-2) | -6 |

"


"
"
| 车辆序号 | FMPC | FSMPC |
|---|---|---|
| 车辆1 | 5.82 | 5.43 |
| 车辆2 | 6.45 | 6.10 |
| 车辆3 | 7.04 | 6.76 |
| 车辆4 | 7.56 | 7.33 |
| 平均值 | 6.72 | 6.40 |
"
"
| 参数 | 数值 |
|---|---|
| 道路总长度/m | 19 |
| 信号灯周期/s | 70 |
| 信号灯红灯时间/s | 45 |
| 信号灯绿灯时间/s | 25 |
| 车辆最高车速/(m·s-1) | 0.26 |
| 车辆最低车速/(m·s-1) | 0 |
| 车辆最大加速度/(m·s-2) | 0.06 |
| 车辆最大减速度/(m·s-2) | -0.12 |
"
"

"
| 车辆序号 | FMPC | FSMPC |
|---|---|---|
| 车辆1 | 2.372 8 | 2.369 4 |
| 车辆2 | 2.384 1 | 2.380 7 |
| 车辆3 | 2.455 6 | 2.391 2 |
| 平均值 | 2.404 2 | 2.380 4 |
| 1 | FAFOUTELLIS P, MANTOUKA E G, VLAHOGIANNI E I. Eco-driving and its impacts on fuel efficiency: an overview of technologies and data-driven methods[J]. Sustainability, 2021, 13(1): 1-17. |
| 2 | NAEEM H M Y, BUTT Y A, AHMED Q, et al. Optimal-control-based eco-driving solution for connected battery electric vehicle on a signalized route[J]. Automotive Innovation, 2023, 6: 586-596. |
| 3 | LIORIS J, PEDARSANI R, TASCIKARAOGLU F Y, et al. Doubling throughput in urban roads by platooning[J]. IFAC - Papers Online, 2016, 49(3): 49-54. |
| 4 | GONCALVES T R, VARMA V S, ELAYOUBI S E. Vehicle platooning schemes considering V2V communications: a joint communication/control approach[C]. 2020 IEEE Wireless Communications and Networking Conference (WCNC), 2020: 1-6. |
| 5 | 杨澜, 赵祥模, 吴国垣, 等. 智能网联汽车协同生态驾驶策略综述 [J]. 交通运输工程学报, 2020, 20(5): 58-72. |
| YANG L, ZHAO X M, WU G Y, et al. Review of cooperative eco-driving strategies based on connected and automated vehicles [J]. Journal of Traffic and Transportation Engineering, 2020, 20(5): 58-72. | |
| 6 | MA F W, YANG Y, WANG J W, et al. Eco-driving-based cooperative adaptive cruise control of connected vehicles platoon at signalized intersections[J]. Transportation Research Part D: Transport and Environment, 2021, 92:1-17. |
| 7 | ZHAI C J, CHEN C Q, ZHENG X L, et al. Ecological cooperative adaptive cruise control for heterogenous vehicle platoons subject to time delays and input saturations [J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(3): 2862-2873. |
| 8 | HALDER K, MONTANARO U, DIXIT S, et al. Distributed H-infinity controller design and robustness analysis for vehicle platooning under random packet drop [J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(5): 4373-4386. |
| 9 | ZHAO W M, DONG N, SIMON S, et al. A platoon based cooperative eco-driving model for mixed automated and human⁃driven vehicle at a signalised intersection [J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 802-821. |
| 10 | CHEN C Y, WANG J W, XU Q, et al. Mixed platoon control of automated and human-driven vehicles at a signalized intersection: dynamical analysis and optimal control [J]. Transportation Research Part C: Emerging Technologies, 2021, 127: 1-19. |
| 11 | ZHANG H Y, DU L L. Platoon-centered control for eco-driving at signalized intersection built upon hybrid MPC system, online learning and distributed optimization part I: modeling and solution algorithm design [J]. Transportation Research Part B: Methodological, 2023, 172: 174-198. |
| 12 | ZHANG H Y, DU L L. Platoon-centered control for eco-driving at signalized intersection built upon hybrid MPC system, online learning and distributed optimization part II: theoretical analysis [J]. Transportation Research Part B: Methodological, 2023, 172: 199-216. |
| 13 | HAO P, WU G Y, BORIBOONSOMSIN K, et al. Eco-approach and departure (EAD) application for actuated signals in real-world traffic [J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(12): 7837-7849. |
| 14 | QI X W, WANG P, WU G Y, et al. Connected cooperative ecodriving system considering human driver error [J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(8): 2721-2733. |
| 15 | HELBING D, TILCH B. Generalized force model of traffic dynamics [J]. Physical Review E, 1998, 58(1): 133-138. |
| 16 | AKCELIK R. Efficiency and drag in the power-based model of fuel consumption [J]. Transportation Research Part B: Methodological, 1989, 23(5): 376-385. |
| 17 | WANG Y, BOYD S. Fast model predictive control using online optimization [J]. IEEE Transactions on Control Systems Technology, 2010, 18(2): 267-278. |
| 18 | HOMCHAUDHURI B, VAHIDI A, PISU P. Fast model predictive control-based fuel efficient control strategy for a group of connected vehicles in urban road conditions [J]. IEEE Transactions on Control Systems Technology, 2017, 25(2): 760-767. |
| [1] | Ao Zhang,Shuyan Li,Bolin Gao,Keke Wan,Guang Zhou,Tongyi Cao. Research on Mass Estimation Algorithm of Intelligent and Connected Commercial Vehicle Based on Cloud Road Map [J]. Automotive Engineering, 2024, 46(6): 1006-1014. |
| [2] | Junyu Zhou,Keqiang Li,Hanxiao Ren,Jie Yu,Yugong Luo. A Cooperative Obstacle Avoidance Lane Change Strategy for Intelligent and Connected Vehicles Based on Scene Division [J]. Automotive Engineering, 2024, 46(5): 745-753. |
| [3] | Shurui Guan,Keqiang Li,Junyu Zhou,Jia Shi,Weiwei Kong,Yugong Luo. A Cooperative Lane Change Strategy for Intelligent Connected Vehicles Oriented to Mandatory Lane Change Scenarios [J]. Automotive Engineering, 2024, 46(2): 201-210. |
| [4] | Pangwei Wang,Cheng Liu,Yunfeng Wang,Mingfang Zhang. Multi-lane Trajectory Optimization for Intelligent Connected Vehicles in Urban Road Network [J]. Automotive Engineering, 2024, 46(2): 241-252. |
| [5] | Siyu Wu,Wenhao Yu,Xingyu Xing,Yuxin Zhang,Chuzhao Li,Xueke Li,Xinyu Gu,Yunwei Li,Xiaohan Ma,Wei Lu,Zheng Wang,Zhenmao Hao,Hong Wang,Jun Li. Methodology of Critical Scenarios-Based Dual-Loop Testing and Verification for Safety of the Intended Functionality [J]. Automotive Engineering, 2023, 45(9): 1583-1607. |
| [6] | Zheng Zuo,Yunpeng Wang,Bin Ma,Bosong Zou,Yaoguang Cao,Shichun Yang. Quantitative Evaluation and Analysis of On-board Network Components Risk Rate Based on AFC-TARA [J]. Automotive Engineering, 2023, 45(9): 1553-1562. |
| [7] | Shengbo Eben Li,Guojian Zhan,Yuxuan Jiang,Zhiqian Lan,Yuhang Zhang,Wenjun Zou,Chen Chen,Bo Cheng,Keqiang Li. Key Technologies of Brain-Inspired Decision and Control Intelligence for Autonomous Driving Systems [J]. Automotive Engineering, 2023, 45(9): 1499-1515. |
| [8] | Xin Shi,Jian Zhu,Xiangmo Zhao,Fei Hui,Junyan Ma. Car-Following Model for Connected Vehicles Based on Multiple Vehicles with State Change Features [J]. Automotive Engineering, 2023, 45(8): 1309-1319. |
| [9] | Yougang Bian,Tiantian Zhang,Heping Xie,Hongmao Qin,Zeyu Yang. Anti-disturbance and Anti-corner-cutting Control for Collaborative Path Tracking of Vehicle Platoon [J]. Automotive Engineering, 2023, 45(8): 1320-1332. |
| [10] | Bing Zhu,Hongyi Jiang,Jian Zhao,Jiayi Han,Yanchen Liu. A Method for Dynamically Calculating and Evaluating the Trustworthiness of Collaborative Perception of Intelligent Connected Vehicles [J]. Automotive Engineering, 2023, 45(8): 1383-1391. |
| [11] | Yuxin Guan,Haojie Ji,Zhe Cui,He Li,Liwen Chen. An Overview of Intrusion Detection Methods for In-Vehicle CAN Network of Intelligent Networked Vehicles [J]. Automotive Engineering, 2023, 45(6): 922-935. |
| [12] | Haotian Liu,Hongqian Wei,Peicheng Shi,Youtong Zhang. The Masquerade Intrusion Detection Technique for Automotive ECUs Based on the Hybrid Feature Extraction of Frame Intervals and Bus Voltages [J]. Automotive Engineering, 2023, 45(11): 2070-2081. |
| [13] | Wenqin Zhong,Weiwei Kong,Zhiheng Li,Jie Yu,Yugong Luo. Reservation Based Multi-Vehicle Cooperative Control at Traffic-Lightless Intersection Under Different Penetration of Mixed Traffic Flow [J]. Automotive Engineering, 2022, 44(8): 1144-1152. |
| [14] | Yihe Chen,Weiwei Kong,Jie Yu,Keqiang Li,Yugong Luo. Reservation-based Vehicle Platoon Control at Unsignalized Intersections Under Mixed Traffic Condition [J]. Automotive Engineering, 2022, 44(7): 953-959. |
| [15] | Pengfei Li,Yugong Luo,Chang Liu,Weiwei Kong. Control Strategies Design of Intelligent and Connected Vehicle Platoon Under Emergency Conditions [J]. Automotive Engineering, 2022, 44(3): 299-307. |
|
||