| 1 |
XU B, BAN X J, BIAN Y, et al. Cooperative method of traffic signal optimization and speed control of connected vehicles at isolated intersections [J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(4): 1390-1403.
|
| 2 |
杨澜, 赵祥模, 吴国垣, 等. 智能网联汽车协同生态驾驶策略综述 [J]. 交通运输工程学报, 2020, 20(5): 58-72.
|
|
YANG L, ZHAO X M, WU G Y, et al. Review of cooperative eco⁃driving strategies based on connected and automated vehicles [J]. Journal of Traffic and Transportation Engineering, 2020, 20(5): 58-72.
|
| 3 |
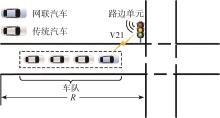
ZHAO W M,DONG N,SIMON S, et al. A platoon based cooperative eco⁃driving model for mixed automated and human⁃driven vehicles at a signalised intersection [J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 802-821.
|
| 4 |
LIN Q F, LI S E, DU X J, et al. Minimize the fuel consumption of connected vehicles between two red⁃signalized intersections in urban traffic [J]. IEEE Transactions on Vehicular Technology, 2018, 67(10): 9060-9072.
|
| 5 |
邹渊, 张涛, 张旭东, 等. 考虑车流影响的网联车辆节能驾驶研究[J]. 汽车工程, 2020, 42(10): 1320-1326.
|
|
ZOU Y, ZHANG T, ZHANG X D, et al. Research on eco⁃driving of connected vehicles considering the influence of traffic flow[J]. Automotive Engineering, 2020, 42(10): 1320-1326.
|
| 6 |
GUO L L, GAO B Z, GAO Y, et al. Optimal energy management for HEVs in eco⁃driving applications using bi⁃level MPC [J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(8): 2153-2162.
|
| 7 |
HU J, SHAO Y L, SUN Z X, et al. Integrated optimal eco⁃driving on rolling terrain for hybrid electric vehicle with vehicle⁃infrastructure communication [J]. Transportation Research Part C: Emerging Technologies, 2016, 68: 228-244.
|
| 8 |
MOSER D, SCHMIED R, WASCHL H, et al. Flexible spacing adaptive cruise control using stochastic model predictive control [J]. IEEE Transactions on Control Systems Technology, 2018, 26(1): 114-127.
|
| 9 |
CHEN H, GUO L L, DING H T, et al. Real⁃time predictive cruise control for eco⁃driving taking into account traffic constraints [J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(8): 2858-2568.
|
| 10 |
HOMCHAUDHURI B, LIN R N, PISU P. Hierarchical control strategies for energy management of connected hybrid electric vehicles in urban roads [J]. Transportation Research Part C: Emerging Technologies, 2016, 62: 70-86.
|
| 11 |
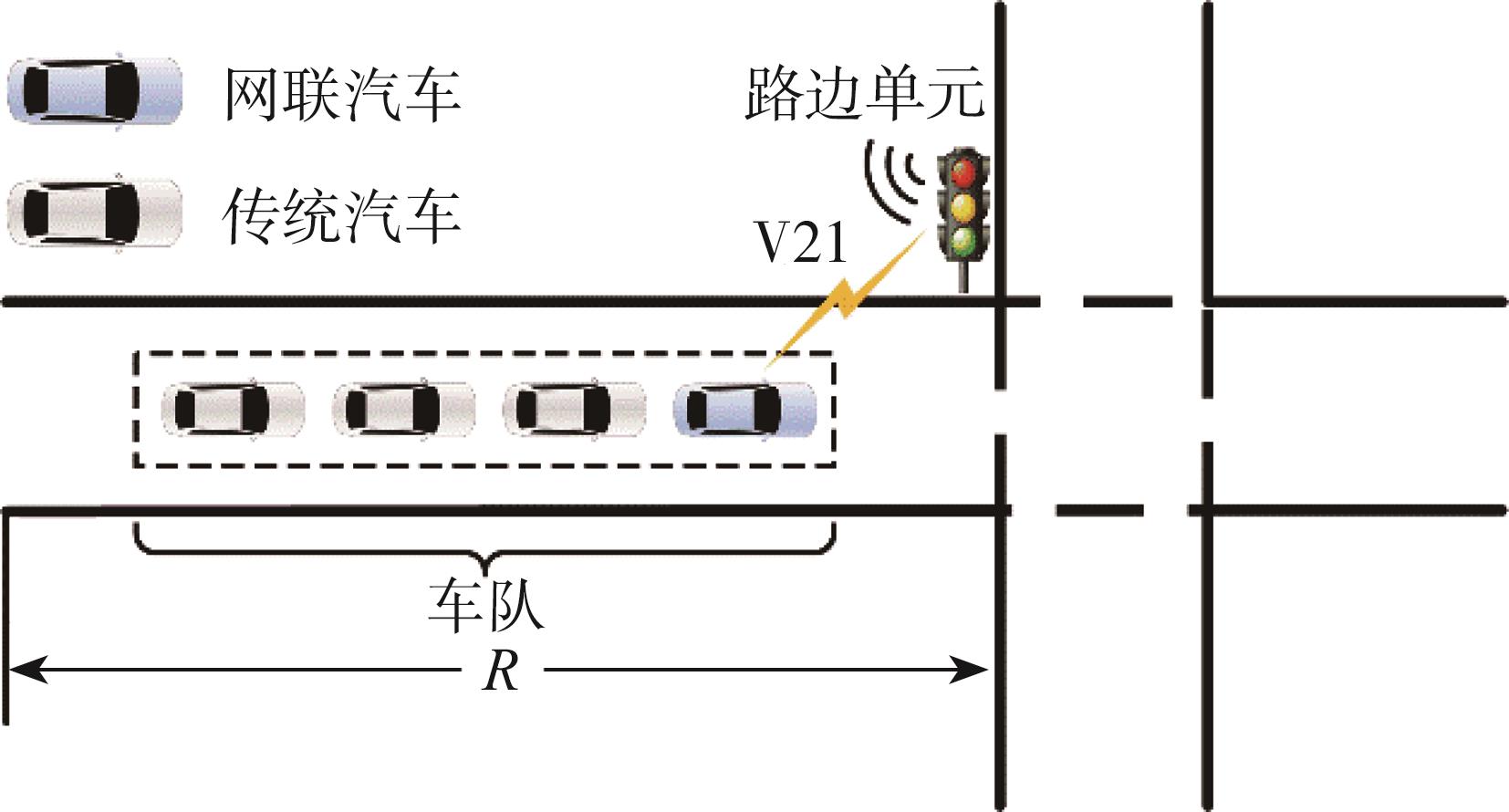
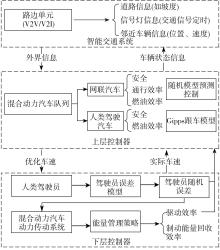
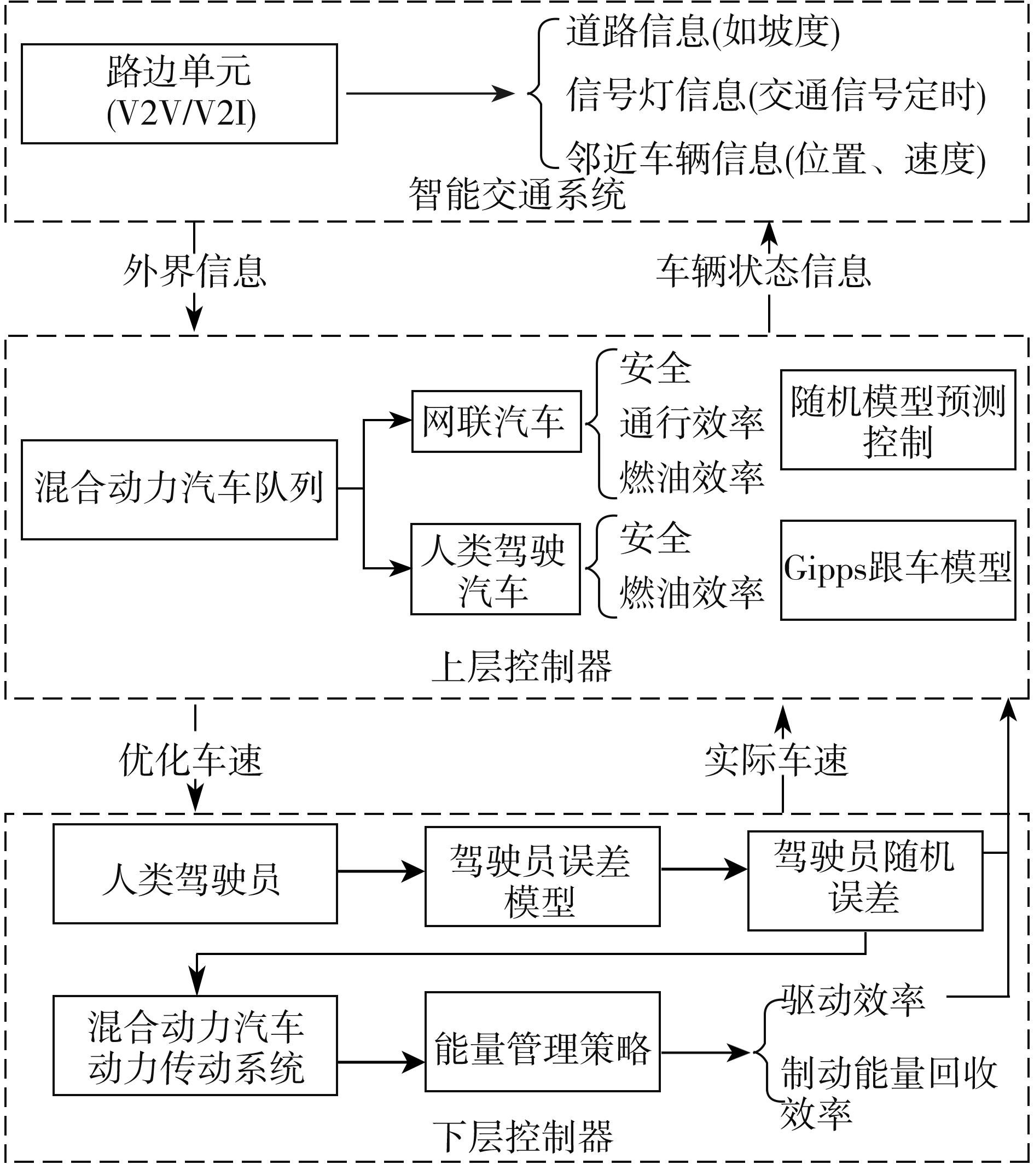
郭景华, 王班, 王靖瑶, 等. 智能网联混合动力汽车队列模型预测分层控制[J]. 汽车工程, 2020, 42(10): 1293-1301.
|
|
GUO J H, WANG B, WANG J Y, et al. Hierarchical model predictive control of intelligent and connected hybrid electric vehicles platooning [J]. Automotive Engineering, 2020, 42(10): 1293-1301.
|
| 12 |
ALESSANDRINI A, CAMPAGNA A, DELLE SITE P, et al. Automated vehicles and the rethinking of mobility and cities [J]. Transportation Research Procedia, 2015, 5: 145-160.
|
| 13 |
GIPPS P G. A behavioural car⁃following model for computer simulation [J]. Transportation Research Part B, 1981, 15B(2): 105-111.
|
| 14 |
QI X W, WANG P, WU G Y, et al. Connected cooperative ecodriving system considering human driver error [J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(8): 2721-2733.
|
| 15 |
CAIRANO S D, BERNARDINI D, BEMPORAD A, et al. Stochastic MPC with learning for driver⁃predictive vehicle control and its application to HEV energy management [J]. IEEE Transactions on Control Systems Technology, 2014, 22(3): 1018-1031.
|
| 16 |
MUSARDO C, RIZZONI G, STACCIA B. A⁃ECMS: an adaptive algorithm for hybrid electric vehicle energy management [C]. 44th IEEE Conference on Decision Control & European Control Conference, Seville, SPAIN, 2005, 1-8:1816-1823.
|
 ),Jian Chen,Bing Wu,Liang Xuan,Chen Chen,Liangliang Chen
),Jian Chen,Bing Wu,Liang Xuan,Chen Chen,Liangliang Chen