Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (11): 1627-1635.doi: 10.19562/j.chinasae.qcgc.2022.11.001
Special Issue: 智能网联汽车技术专题-规划&控制2022年
Qiaobin Liu,Lu Yang,Bolin Gao( ),Jianqiang Wang,Keqiang Li
),Jianqiang Wang,Keqiang Li
Received:2022-06-30
Revised:2022-07-27
Online:2022-11-25
Published:2022-11-19
Contact:
Bolin Gao
E-mail:gaobolin@tsinghua.edu.cn
Qiaobin Liu,Lu Yang,Bolin Gao,Jianqiang Wang,Keqiang Li. Car Following Model for Intelligent Vehicles Based on Dynamic Balance of Perception Risk[J].Automotive Engineering, 2022, 44(11): 1627-1635.
"
"
"

"

"
"
"

"

"
"
"
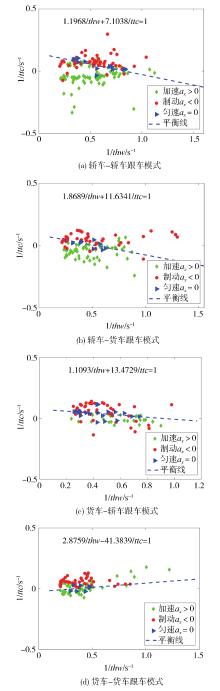
| 模式 | RP<0 ( | RP>0 ( |
|---|---|---|
| Car-Car | -1.939 7 | -27.412 6 |
| Car-Truck | -2.062 1 | -7.090 7 |
| Truck-Car | -1.357 4 | -9.769 4 |
| Truck-Truck | -4.449 0 | -10.199 5 |
| 1 | SAIFUZZAMAN M, ZHENG Z. Incorporating human-factors in car-following models: a review of recent developments and research needs[J]. Transportation Research Part C: Emerging Technologies, 2014,48: 379-403. |
| 2 | 田钧方, 朱陈强, 贾宁, 等. 基于轨迹数据的车辆跟驰行为分析与建模综述[J]. 交通运输系统工程与信息, 2021,21(5): 148-159. |
| TIAN J F, ZHU C Q, JIA N, et al. Review of car-following behavior analysis and modeling based on trajectory data[J]. Journal of Transportation Systems Engineering and Information Technology, 2021,21(5): 148-159. | |
| 3 | KONG D, LIST G F, GUO X, et al. Modeling vehicle car-following behavior in congested traffic conditions based on different vehicle combinations[J]. Transportation Letters, 2018,10(5): 280-293. |
| 4 | LIU L, ZHU L, YANG D. Modeling and simulation of the car-truck heterogeneous traffic flow based on a nonlinear car-following model[J]. Applied Mathematics and Computation, 2016,273: 706-717. |
| 5 | SUN Z, YAO X, QIN Z, et al. Modeling car-following heterogeneities by considering leader–follower compositions and driving style differences[J]. Transportation Research Record: Journal of the Transportation Research Board, 2021,2675(11): 851-864. |
| 6 | PARK M, KIM Y, YEO H. Development of an asymmetric car-following model and simulation validation[J]. IEEE Transactions on Intelligent Transportation Systems, 2020,21(8): 3513-3524. |
| 7 | KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highD dataset: a drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems[C]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2018. |
| 8 | 王雪松, 孙平, 张晓春, 等. 基于自然驾驶数据的高速公路跟驰模型参数标定[J]. 中国公路学报, 2020,33(5): 132-142. |
| WANG X S, SUN P, ZHANG X C, et al. Calibrating car-following models on freeway based on naturalistic driving data[J]. China Journal of Highway Transportation, 2020,33(5): 132-142. | |
| 9 | 杨龙海, 赵顺, 徐洪. 基于改进优化速度函数的跟驰模型研究[J]. 交通运输系统工程与信息, 2017,17(2): 41-46. |
| YANG L H, ZHAO S, XU H. Car-following model based on the modified optimal velocity function[J]. Journal of Transportation Systems Engineering and Information Technology, 2017,17(2): 41-46. | |
| 10 | 付锐, 袁小慧, 郭应时, 等. 相邻车道车辆并道预测与跟车控制改进的研究[J]. 汽车工程, 2017,39(10): 1106-1113. |
| FU R, YUAN X, GUO Y, et al. A study on the merging prediction of the vehicle on adjacent lane and the improvement of vehicle-following control[J]. Automotive Engineering, 2017,39(10): 1106-1113. | |
| 11 | 郭海锋, 袁鑫良, 徐东伟. 车辆跟驰模型参数标定中的性能指标选择[J]. 中国公路学报, 2017,30(1): 103-110. |
| GUO H F, YUAN X L, XU D W. Selection of measures of performance on calibrating parameters in car following models[J]. China Journal of Highway Transportation, 2017,30(1): 103-110. | |
| 12 | 袁伟, 付锐, 马勇, 等. 基于高速实车驾驶数据的驾驶人跟车模型研究[J]. 汽车工程, 2015,37(6): 679-685. |
| YUAN W, FU R, MA Y, et al. A study on driver’s vehicle-following model based on high speed real driving data[J]. Automotive Engineering, 2015,37(6): 679-685. | |
| 13 | KESTING A, TREIBER M. Calibrating car-following models by using trajectory data[J]. Transportation Research Record: Journal of the Transportation Research Board, 2008,2088(1): 148-156. |
| 14 | NI D, LEONARD J D, JIA C, et al. Vehicle longitudinal control and traffic stream modeling[J]. Transportation Science, 2016,50(3): 1016-1031. |
| 15 | LIN Y, WANG P, ZHOU Y, et al. Platoon trajectories generation: a unidirectional interconnected LSTM-based car-following model[J]. IEEE Transactions on Intelligent Transportation Systems, 2022,23(3): 2071-2081. |
| 16 | 梁军, 王军, 杨云庆, 等. 网联车对抗神经网络跟驰模型[J]. 汽车工程, 2021,43(2): 189-195. |
| LIANG J, WANG J,YANG Y Q, et al. A connected and autonomous vehicle following model based on generative adversarial network[J]. Automotive Engineering, 2021,43(2): 189-195. | |
| 17 | 郭景华, 李文昌, 罗禹贡, 等. 基于深度强化学习的驾驶员跟车模型研究[J]. 汽车工程, 2021,43(4): 571-579. |
| GUO J H, LI W C, LUO Y G, et al. Driver car⁃following model based on deep reinforcement learning[J]. Automotive Engineering, 2021,43(4): 571-579. | |
| 18 | ZHU M, WANG X, WANG Y. Human-like autonomous car-following model with deep reinforcement learning[J]. Transportation Research Part C: Emerging Technologies, 2018,97: 348-368. |
| 19 | 倪捷, 张凯铎, 刘志强, 等. 自适应期望跟车间距和行为习惯的驾驶人跟驰模型[J]. 交通运输系统工程与信息, 2022: 1-10. |
| NI J, ZHANG K D, LIU Z Q, et al. Car-following model with adaptive expected driver’s following distance and behavior[J]. Journal of Transportation Systems Engineering and Information Technology, 2022: 1-10. | |
| 20 | 赵健, 宋东鉴, 朱冰, 等. 基于自学习和监督学习混合驱动的智能汽车跟驰控制策略[J]. 中国公路学报, 2022,35(3): 55-65. |
| ZHAO J, SONG D J, ZHU B, et al. Intelligent vehicle-following control strategy based on self-learning and supervised-learning hybrid-driven framework[J]. China Journal of Highway Transportation, 2022,35(3): 55-65. | |
| 21 | KONDOH T, YAMAMURA T, KITAZAKI S, et al. Identification of visual cues and quantification of drivers' perception of proximity risk to the lead vehicle in car-following situations[J]. Journal of Mechanical Systems for Transportation and Logistics, 2008,1(2): 170-180. |
| [1] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [2] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [3] | Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention [J]. Automotive Engineering, 2023, 45(8): 1448-1456. |
| [4] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |
| [5] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [6] | Zixian Li,Shiju Pan,Yuan Zhu,Binbing He,Youchun Xu. Semi-active Suspension Control for Intelligent Vehicles Based on State Feedback and Preview Feedforward [J]. Automotive Engineering, 2023, 45(5): 735-745. |
| [7] | Shiju Pan,Yongle Li,Zixian Li,Binbing He,Yuan Zhu,Youchun Xu. Path Following Method of Intelligent Vehicles Based on Improved Pure Tracking [J]. Automotive Engineering, 2023, 45(1): 1-8. |
| [8] | Wenbo Shao,Jun Li,Yuxin Zhang,Hong Wang. Key Technologies to Ensure the Safety of the Intended Functionality for Intelligent Vehicles [J]. Automotive Engineering, 2022, 44(9): 1289-1304. |
| [9] | Zihao Wang,Yingfeng Cai,Hai Wang,Long Chen,Xiaoxia Xiong. Surrounding Multi-Target Trajectory Prediction Method Based on Monocular Visual Motion Estimation [J]. Automotive Engineering, 2022, 44(9): 1318-1326. |
| [10] | Zewu Deng,Zhaozheng Hu,Zhe Zhou, LiuYulin,Chao Peng. Intelligent Vehicle Positioning by Fusing LiDAR and Double-layer Map Model [J]. Automotive Engineering, 2022, 44(7): 1018-1026. |
| [11] | Xinyu Chen,Lijun Qian,Qidong Wang. Eco-driving Control at Signalized Intersections with Consideration of Time Delay [J]. Automotive Engineering, 2022, 44(7): 960-968. |
| [12] | Jian Zhao,Dongjian Song,Bing Zhu,Hangzhe Wu,column:Han Jiayi,Yuxiang Liu. Traffic Vehicles Intention Recognition Method Driven by Data and Mechanism Hybrid [J]. Automotive Engineering, 2022, 44(7): 997-1008. |
| [13] | Dongjian Song,Bing Zhu,Jian Zhao,Jiayi Han,Yanchen Liu. Human-Like Behavior Decision-Making of Intelligent Vehicles Based on Driving Behavior Generation Mechanism [J]. Automotive Engineering, 2022, 44(12): 1797-1808. |
| [14] | Xiujian Yang,Xinyu Yin,Jin Gao. Interference Suppression Characteristics of Vehicle Platoon with Periodic Type Control Structure [J]. Automotive Engineering, 2022, 44(12): 1834-1843. |
| [15] | Longxin Guan,Zufei Gu,Chao Zhang,Aichun Wang,Chenruo Peng,Huihua Jiang,Xiaojian Wu. Model Predictive Path Following Control of Intelligent Vehicles Considering System Complex Disturbances [J]. Automotive Engineering, 2022, 44(12): 1844-1855. |