Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (11): 1636-1646.doi: 10.19562/j.chinasae.qcgc.2022.11.002
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2022年
Previous Articles Next Articles
Hao Chen1,2,Hong Wang3,Weihan Li1,2,Xianxu Bai1,2( ),Jiong Chen4,Chuzhao Li3,5,Qin Shi1,2,Jun Sun1,2
),Jiong Chen4,Chuzhao Li3,5,Qin Shi1,2,Jun Sun1,2
Received:2022-05-06
Revised:2022-06-16
Online:2022-11-25
Published:2022-11-19
Contact:
Xianxu Bai
E-mail:bai@hfut.edu.cn
Hao Chen,Hong Wang,Weihan Li,Xianxu Bai,Jiong Chen,Chuzhao Li,Qin Shi,Jun Sun. Risk Assessment of Safety of the Intended Functionality Scenes Based on Driving Safety Field Theory[J].Automotive Engineering, 2022, 44(11): 1636-1646.
"
"
| 场景层级 | 元素描述 |
|---|---|
| 层级1:道路结构 | 道路形状、车道类型、地标 |
| 层级2:交通设施 | 交通信号、路灯、树木 |
| 层级3:道路临时事件 | 道路工作、可逆车道 |
| 层级4:交通参与者 | 车辆、行人、障碍物 |
| 层级5:气候环境 | 天气、光照、风 |
| 层级6:通信状态 | 通信类型、计算边缘 |
| 层级7:自车信息 | 传感器、计算设备 |
"
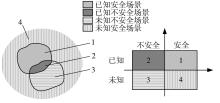
| SOTIF场景 | RDSI范围 | 车辆运行状态 |
|---|---|---|
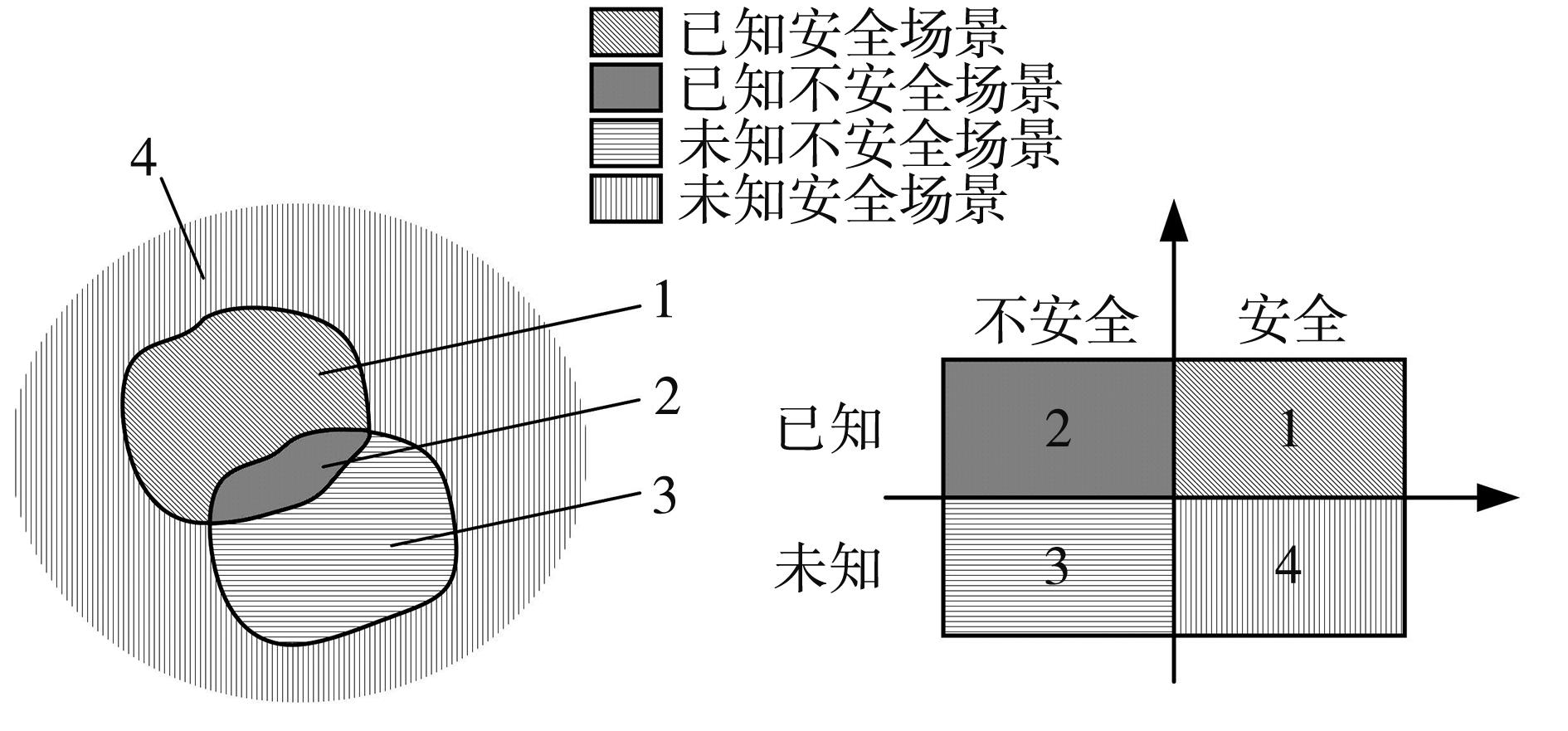
| 区域1:已知安全场景 | RDSI < RDSI1* | 安全 |
| 区域2:已知不安全场景 | RDSI > RDSI1** | 非常危险 |
| 区域3:未知不安全场景 | RDSI1* < RDSI < RDSI2* | 危险 |
| 区域4:未知安全场景 |

"
"
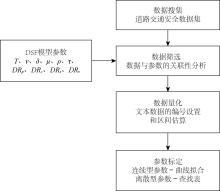
| 参数符号 | 物理意义 | 参数类型 |
|---|---|---|
| Ti | 物体类型 | 离散型 |
| mi | 物体质量 | 连续型 |
| vi | 物体速度 | 连续型 |
| δi | 能见度 | 离散型 |
| μi | 路面附着系数 | 连续型 |
| ρi | 道路曲率 | 离散型 |
| τi | 道路坡度 | 离散型 |
| DRi_p | 身心状态 | 离散型 |
| DRi_c | 认知水平 | 离散型 |
| DRi_s | 驾驶技能 | 离散型 |
| DRi_v | 违法行为 | 离散型 |
"
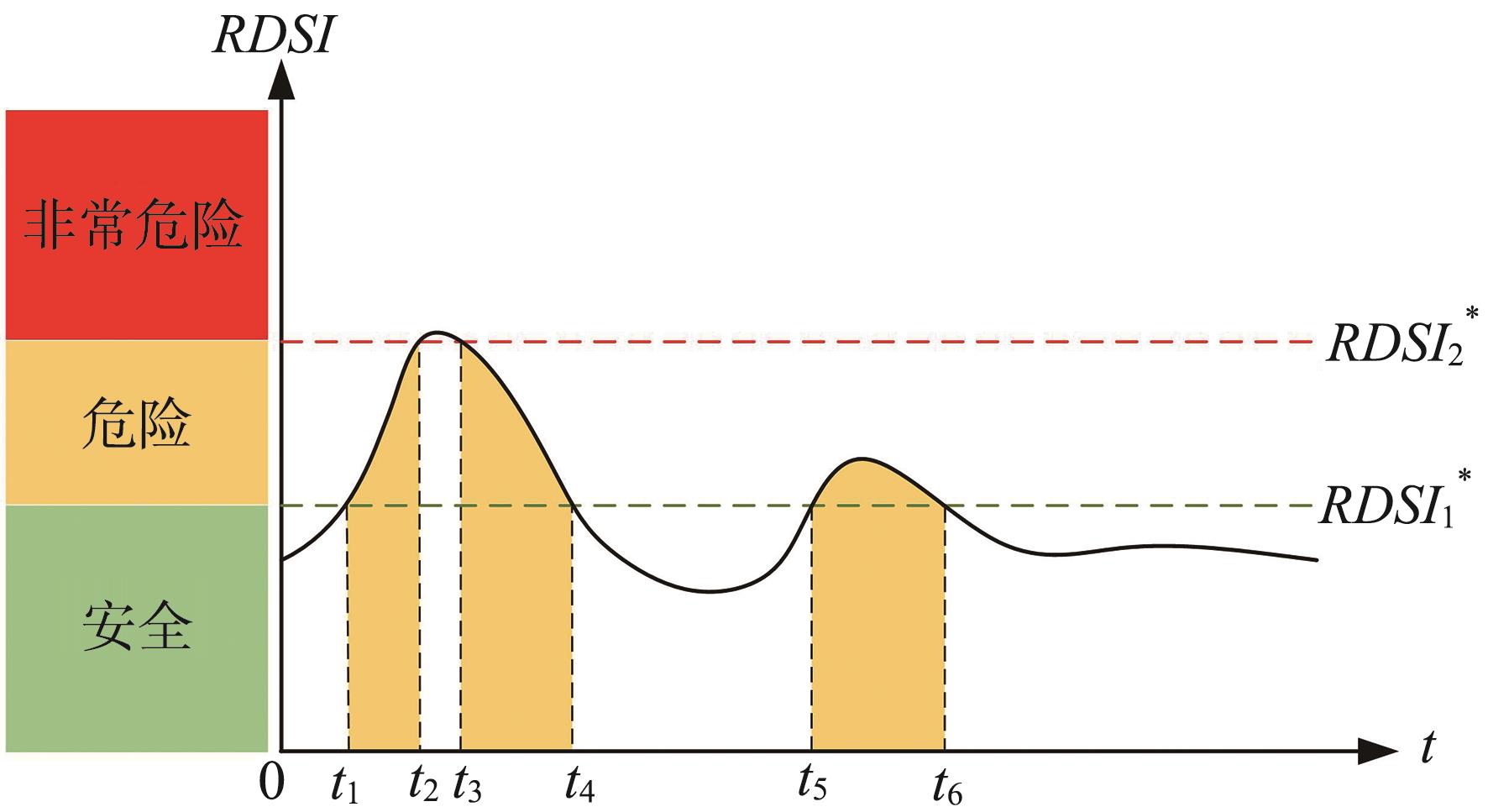
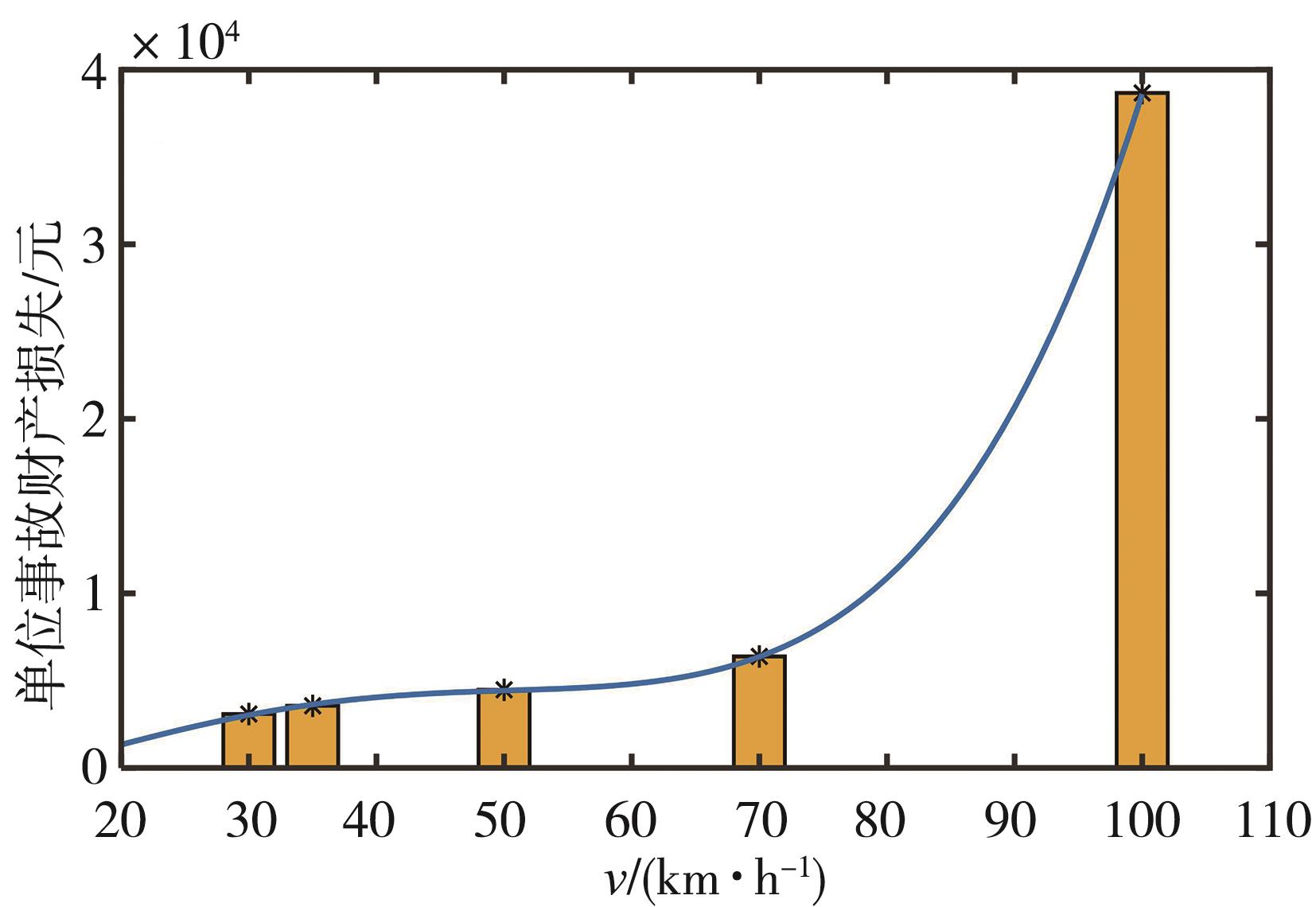
| 道路等级 | 平均速度/(km·h-1) | 单位事故损失/元 |
|---|---|---|
| 高速公路 | 100 | 38 666.0 |
| 一级公路 | 70 | 6 385.8 |
| 二级公路 | 50 | 4 477.9 |
| 三级公路 | 35 | 3 561.2 |
| 四级公路 | 30 | 3 090.7 |

"
"
| 编号i | 物体类别Ti | 单位事故损失/元 | ψ(Ti ) |
|---|---|---|---|
| 1 | 汽车 | 5 630 | 1.000 |
| 2 | 载货车 | 8 124 | 1.443 |
| 3 | 摩托车 | 1 887 | 0.335 |
| 4 | 非机动车 | 1 769 | 0.314 |
| 5 | 行人 | 6 393 | 1.136 |
"
| 编号i | 能见度δi /m | 单位事故损失/元 | ψ(δi ) |
|---|---|---|---|
| 1 | < 50 | 4 274.0 | 1.000 |
| 2 | 50-100 | 4 392.4 | 1.028 |
| 3 | 100-200 | 4 711.6 | 1.102 |
| 4 | > 200 | 6 225.3 | 1.457 |
"
| 道路曲率 | 道路坡度 | |||
|---|---|---|---|---|
| τ1 | τ2 | τ3 | τ4 | |
| ρ1 | 1.000 | 1.613 | 1.374 | 4.161 |
| ρ2 | 1.177 | 1.410 | 1.570 | |
| ρ3 | 1.277 | 1.276 | 1.409 | |
"
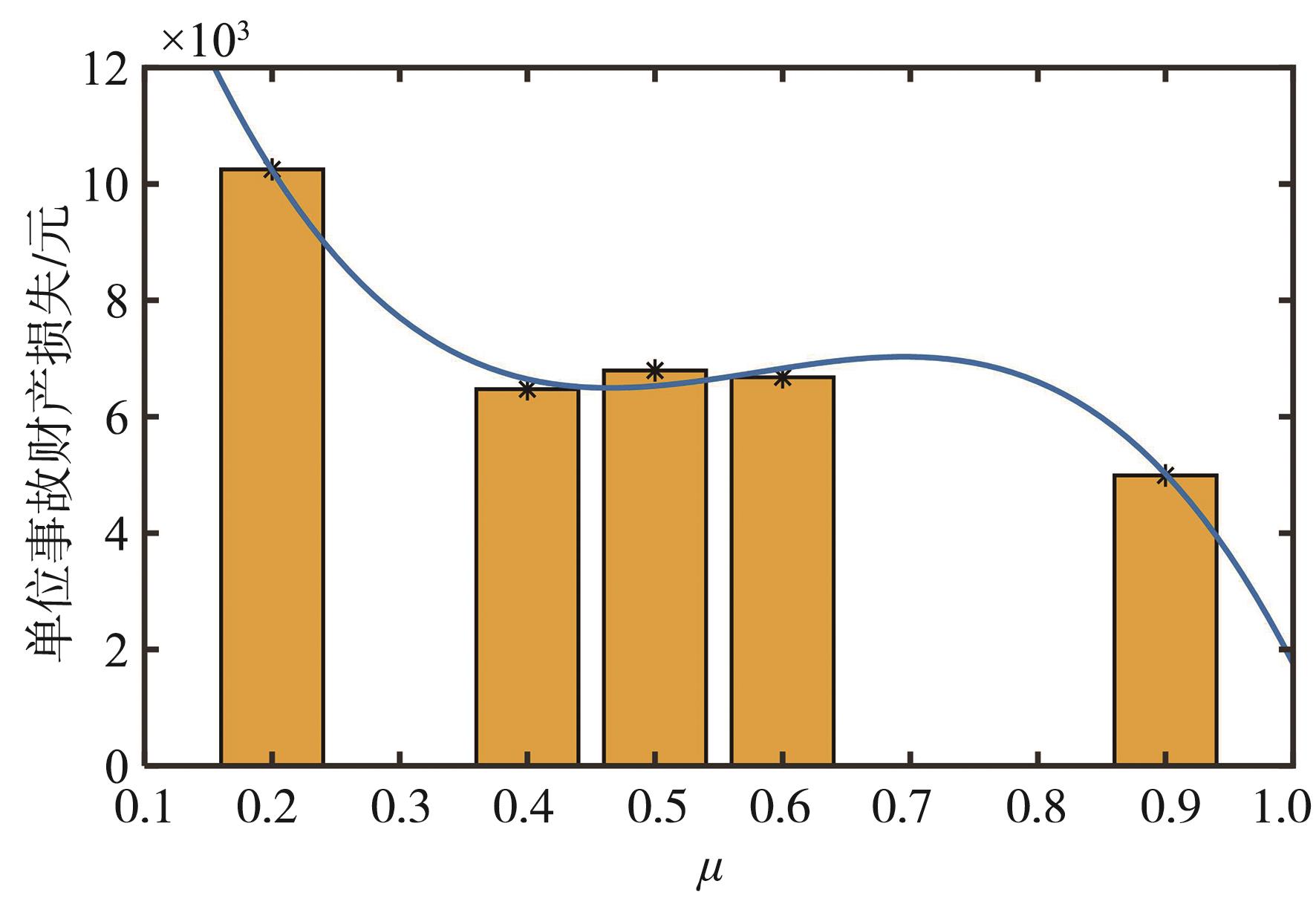
| 路面状态 | 路面附着系数 | 单位事故损失/元 |
|---|---|---|
| 干燥 | 0.90 | 4 990.6 |
| 潮湿 | 0.60 | 6 677.3 |
| 积水 | 0.50 | 6 794.7 |
| 泥泞 | 0.55 | 4 458.7 |
| 漫水 | 0.30 | 6 472.6 |
| 冰雪 | 0.20 | 10 250.3 |

"
"
| 编号i | 驾驶员年龄DRi_p | ψ(DRi_p ) |
|---|---|---|
| 1 | 16-20岁 | 0.529 |
| 2 | 21-25岁 | 0.768 |
| 3 | 26-30岁 | 0.951 |
| 4 | 31-35岁 | 1.00 |
| 5 | 36-40岁 | 0.949 |
| 6 | 41-45岁 | 0.911 |
| 7 | 46-50岁 | 0.803 |
| 8 | 51-55岁 | 0.715 |
| 9 | 56-60岁 | 0.600 |
| 10 | 61-65岁 | 0.482 |
| 11 | 65岁以上 | 0.535 |
"
| 编号i | 受教育水平DRi_c | ψ(DRi_c ) |
|---|---|---|
| 1 | 无 | 0.691 |
| 2 | 小学 | 0.448 |
| 3 | 中学 | 0.370 |
| 4 | 本科 | 1.000 |
| 5 | 本科及以上 | 0.788 |
"
| 编号i | 驾驶员驾龄DRi_s | ψ(DRi_s ) |
|---|---|---|
| 1 | 1年以下 | 0.601 |
| 2 | 2年 | 0.611 |
| 3 | 3年 | 0.684 |
| 4 | 4年 | 0.674 |
| 5 | 5年 | 0.667 |
| 6 | 6-10年 | 0.796 |
| 7 | 11-15年 | 0.922 |
| 8 | 16-20年 | 0.948 |
| 9 | 20年以上 | 1.000 |
"
| 编号i | 违法行为DRi_v | ψ(DRi_v ) |
|---|---|---|
| 1 | 超速行驶 | 0.467 |
| 2 | 酒后驾驶 | 0.414 |
| 3 | 逆向行驶 | 0.431 |
| 4 | 疲劳驾驶 | 1.000 |
| 5 | 违法变道 | 0.416 |
| 6 | 违法超车 | 0.374 |
| 7 | 违法倒车 | 0.314 |
| 8 | 违法掉头 | 0.380 |
| 9 | 违法装载 | 0.528 |
| 10 | 违反交通信号 | 0.443 |
| 11 | 未按规定让行 | 0.374 |

"


"

"
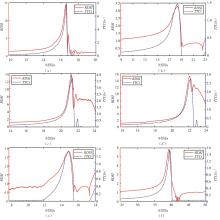
| 场景编号 | 场景解释 |
|---|---|
| ① | 目标车静止,自车速度50 km/h |
| ② | 目标车车速20 km/h,自车车速60 km/h,纵向偏置50% |
| ③ | 行人横穿,行人速度5 km/h,自车车速50 km/h |
| ④ | 自行车横穿,自行车速度5 km/h,自车车速50 km/h |
| ⑤ | 跟车距离12 m,跟车车速50 km/h,前车减速度2g |
| ⑥ | 目标车切入,目标车车速20 km/h,自车车速60 km/h |
"


"


"

"
| 场景类别 | 场景编号 | 场景描述 | 风险值 |
|---|---|---|---|
| 已知安全 | ①、④、⑥ | ||
| 已知不安全 | |||
| 未知安全/不安全 | ② | 主车换道,目标车道前方3 m存在静止车 | 0.12 |
| ③ | 主车跟车距离1.5 m,跟车速度4 km/h | 0.04 | |
| ⑤ | 主车换道2 s后,前方5 m目标车进行换道 | 0.05 |
"

| 1 | Forbes. Tesla in Taiwan crashes directly into overturned truck, ignores pedestrian, with autopilot on [EB/OL]. Forbes, (2020-1-2)[2022-2-18].https://www.forbes.com/sites/bradtempleton/2020/06/02/tesla-in-taiwan-crashes-directly-into-overturned-truck-ignores-pedestrian-with-autopilot-on/. |
| 2 | MENZEL T, BAGSCHIK G, MAURER M. Scenarios for development, test and validation of automated vehicles[C]. 2018 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2018: 1821-1827. |
| 3 | WEBER H, BOCK J, KLIMKE J, et al. A framework for definition of logical scenarios for safety assurance of automated driving[J]. Traffic Injury Prevention, 2019, 20: S65-S70. |
| 4 | ZHAO D, GUO Y, JIA Y J. Trafficnet: an open naturalistic driving scenario library[C]. IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2017: 1-8. |
| 5 | ZHAO D, LAM H, PENG H, et al. Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(3): 595-607. |
| 6 | ZHAO D, HUANG X, PENG H, et al. Accelerated evaluation of automated vehicles in car-following maneuvers[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 19(3): 733-744. |
| 7 | XU Y, ZOU Y, SUN J. Accelerated testing for automated vehicles safety evaluation in cut-in scenarios based on importance sampling, genetic algorithm and simulation applications[J]. Journal of Intelligent and Connected Vehicles, 2018. |
| 8 | FENG S, FENG Y, YU C, et al. Testing scenario library generation for connected and automated vehicles, part I: methodology[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(3): 1573-1582. |
| 9 | FENG S, FENG Y, YU C, et al. Testing scenario library generation for connected and automated vehicles, part II: case studies[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(9): 5635-5647. |
| 10 | FENG S, FENG Y, YAN X, et al. Safety assessment of highly automated driving systems in test tracks: a new framework[J]. Accident Analysis & Prevention, 2020, 144: 105664. |
| 11 | FENG S, FENG Y, SUN H, et al. Testing scenario library generation for connected and automated vehicles: an adaptive framework[J]. IEEE Transactions on Intelligent Transportation Systems, 2020. |
| 12 | FENG S, YAN X, SUN H, et al. Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment[J]. Nature Communications, 2021, 12(1): 1-14. |
| 13 | ISO. Road vehicles safety of the intended functionality: ISO/PAS 21448: 2019[S]. Switzerland: ISO, 2018. |
| 14 | LI Y, LI K Q, ZHENG Y, et al. Threat assessment techniques in intelligent vehicles: a comparative survey[J]. IEEE Intelligent Transportation Systems Magazine, 2020, 13(4): 71-91. |
| 15 | BOGENRIEDER R, FEHRING M, BACHMANN R. PRE-SAFE in rear-end collision situations[C]. Proceedings 21st International Technical Conferrence on the Enhanced Safety of Vehicles, Stuttgart, 2009. |
| 16 | LI Y, ZHENG Y, WANG J Q, et al. Crash probability estimation via quantifying driver hazard perception[J]. Accident Analysis & Prevention, 2018, 116: 116-125. |
| 17 | WINSUM W V, HEINO A. Choice of time-headway in car-following and the role of time-to-collision information in braking[J]. Ergonomics, 1996, 39(4): 579-592. |
| 18 | WANG J Q, WU J, LI Y. The driving safety field based on driver-vehicle-road interactions[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2203-2214. |
| 19 | WANG J Q, WU J, ZHENG X, et al. Driving safety field theory modeling and its application in pre-collision warning system [J]. Transportation Research Part C: Emerging Technologies, 2016, 72: 306-324. |
| 20 | LI Y, WANG J Q, WU J. Model calibration concerning risk coefficients of driving safety field model[J]. Journal of Central South University, 2017, 24(6): 1494-1502. |
| 21 | LI M J, SONG X L, CAO H T, et al. Shared control with a novel dynamic authority allocation strategy based on game theory and driving safety field[J]. Mechanical Systems and Signal Processing, 2019, 124: 199-216. |
| 22 | WU R F, ZHENG X J, XU Y N, et al. Modified driving safety field based on trajectory prediction model for pedestrian–vehicle collision[J]. Sustainability, 2019, 11(22): 6254. |
| 23 | GONZÁLEZ D, PÉREZ J, MILANÉS V, et al. A review of motion planning techniques for automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(4): 1135-1145. |
| 24 | RAKSINCHAROENSAK P, HASEGAWA T, NAGAI M. Motion planning and control of autonomous driving intelligence system based on risk potential optimization framework[J]. International Journal of Automotive Engineering, 2016, 7(AVEC14): 53-60. |
| 25 | RASEKHIPOUR Y, KHAJEPOUR A, CHEN S K, et al. A potential field-based model predictive path-planning controller for autonomous road vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 18(5): 1255-1267. |
| 26 | BOUNINI F, GINGRAS D, POLLART H, et al. Modified artificial potential field method for online path planning applications[C]. 2017 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2017: 180-185. |
| 27 | ULBRICH S, MENZEL T, RESCHKA A, et al. Defining and substantiating the terms scene, situation, and scenario for automated driving[C]. IEEE 18th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2015: 982-988. |
| 28 | WU S Y, WANG H, YU W H, et al. A new SOTIF scenario hierarchy and its critical test case generation based on potential risk assessment[C]. 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI). IEEE, 2021: 399-409. |
| 29 | 李林恒, 甘婧, 曲栩, 等. 智能网联环境下基于安全势场理论的车辆换道模型[J]. 中国公路学报, 2021, 34(6): 184-195. |
| LI L H, GAN J, QU X, et al. Lane-changing model based on safety potential field theory under the connected and automated vehicles environment[J]. China Journal of Highway and Transport, 2021, 34(6): 184-195. | |
| 30 | 中国公安部交通运输局. 2010-2016年中华人民共和国道路交通事故统计年报[G]. 北京, 2017. |
| Transportation Bureau of the Ministry of Public Security of the PRC. 2010-2016 annals of road traffic accidents statistics of the People’s Republic of China[G]. Beijing, 2017. |
| [1] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [2] | Xianxu Bai,Yu Zuo,Weihan Li,Qin Shi,Chuzhao Li,Shulian Zhao,Jiong Chen. Quantitative Evaluation of SOTIF for Control Module of AEBS [J]. Automotive Engineering, 2023, 45(9): 1655-1665. |
| [3] | Zheng Zuo,Yunpeng Wang,Bin Ma,Bosong Zou,Yaoguang Cao,Shichun Yang. Quantitative Evaluation and Analysis of On-board Network Components Risk Rate Based on AFC-TARA [J]. Automotive Engineering, 2023, 45(9): 1553-1562. |
| [4] | Da Li,Junjun Deng,Zhaosheng Zhang,Peng Liu,Zhenpo Wang. Review on Power Battery Safety Warning Strategy in Electric Vehicles [J]. Automotive Engineering, 2023, 45(8): 1392-1407. |
| [5] | Xiang Gao,Long Chen,Xinye Wang,Xiaoxia Xiong,Yicheng Li,Yuexia Chen. Intelligent Vehicle Driving Risk Assessment Method Based on Trajectory Prediction [J]. Automotive Engineering, 2023, 45(4): 588-597. |
| [6] | Gege Cui,Lü Chao,Jinghang Li,Zheyu Zhang,Guangming Xiong,Jianwei Gong. Data-Driven Personalized Scenario Risk Map Construction for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(2): 231-242. |
| [7] | Fengchong Lan,Yingjie Liu,Jiqing Chen,Zhaolin Liu. Study on Motion Planning of Autonomous Vehicles in Cut-in Scenes Based on Dynamic Game Algorithm [J]. Automotive Engineering, 2023, 45(1): 9-19. |
| [8] | Shunchang Duan,Xianxu Bai,Qin Shi,Weihan Li,Guannan He. The Design of the Safety of the Intended Functionality of the Control Strategies for Vehicle Automatic Emergency Braking System [J]. Automotive Engineering, 2022, 44(9): 1305-1317. |
| [9] | Jiangkun Li,Weiwen Deng,Bingtao Ren,Wenqi Wang,Juan Ding. Automatic Driving Edge Scene Generation Method Based on Scene Dynamics and Reinforcement Learning [J]. Automotive Engineering, 2022, 44(7): 976-986. |
| [10] | Dongkui Tan,Gangjun Hu,Bo Zhu,Lai Jin,Jie Zhang. Intelligent Vehicle Autonomous Emergency Braking System Considering Safety of the Intended Functionality [J]. Automotive Engineering, 2022, 44(6): 799-808. |
| [11] | Yu Chen,Xiaogang Wu,Jiuyu Du,Jinlei Sun. Research on Energy Management of Microgrid with Consideration of Taxi Charging Behavior [J]. Automotive Engineering, 2022, 44(4): 525-534. |
| [12] | Yuande Jiang,Bing Zhu,Xiangmo Zhao,Jian Zhao,Bingbing Zheng. Modeling of Traffic Vehicle Interaction for Autonomous Vehicle Testing [J]. Automotive Engineering, 2022, 44(12): 1825-1833. |
| [13] | Shengjie Huang,Manjiang Hu,Yunshui Zhou,Zhouping Yin,Xiaohui Qin,Yougang Bian,Qianqian Jia. Vehicle Visual SLAM in Dynamic Scenes Based on Semantic Segmentation and Motion Consistency Constraints [J]. Automotive Engineering, 2022, 44(10): 1503-1510. |
| [14] | Naixuan Zhu,Zhenhai Gao,Hongyu Hu,Lü Ying,Weiguang Zhao. Research on Personalized Lane Change Triggering Based on Traffic Risk Assessment [J]. Automotive Engineering, 2021, 43(9): 1314-1321. |
| [15] | Xuesong Bai,Weiwen Deng,Bingtao Ren,Peng Liu,Jiangkun Li,Juan Ding. An Extraction Method of Scenario Elements for Autonomous Driving Simulation [J]. Automotive Engineering, 2021, 43(7): 1030-1036. |