Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (2): 231-242.doi: 10.19562/j.chinasae.qcgc.2023.02.008
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2023年
Previous Articles Next Articles
Gege Cui,Lü Chao,Jinghang Li,Zheyu Zhang,Guangming Xiong( ),Jianwei Gong
),Jianwei Gong
Received:2022-07-11
Revised:2022-09-15
Online:2023-02-25
Published:2023-02-21
Contact:
Guangming Xiong
E-mail:xiongguangming@bit.edu.cn
Gege Cui,Lü Chao,Jinghang Li,Zheyu Zhang,Guangming Xiong,Jianwei Gong. Data-Driven Personalized Scenario Risk Map Construction for Intelligent Vehicles[J].Automotive Engineering, 2023, 45(2): 231-242.
"
"
"
"
"
"

"

"
| 驾驶员编号 | 性别 | 年龄/岁 | 驾龄/年 |
|---|---|---|---|
| 1 | 男 | 33 | 10 |
| 2 | 男 | 29 | 6 |
| 3 | 男 | 22 | 2 |
"
驾驶员1 操作特征 | ||||
|---|---|---|---|---|
| RSS | SC | RSS | SC | |
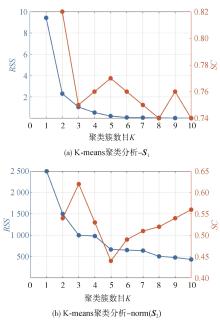
| K=2 | 2.31 | 0.82 | 1 500 | 0.54 |
| K=3 | 1.06 | 0.75 | 1 000 | 0.62 |
| K=4 | 0.54 | 0.76 | 982 | 0.53 |
| K=5 | 0.21 | 0.77 | 667 | 0.44 |
| K=6 | 0.08 | 0.76 | 653 | 0.49 |
| K=7 | 0.06 | 0.75 | 641 | 0.51 |
| K=8 | 0.04 | 0.74 | 506 | 0.52 |
| K=9 | 0.02 | 0.76 | 479 | 0.54 |
| K=10 | 0.02 | 0.74 | 433 | 0.56 |
"
"
"
| 驾驶员 | 驾驶员1 | 驾驶员2 | 驾驶员3 | |||
|---|---|---|---|---|---|---|
| RSS | SC | RSS | SC | RSS | SC | |
| K=2 | 2.31 | 0.82 | 9.67 | 0.86 | 11.17 | 0.76 |
| K=3 | 1.06 | 0.75 | 0.67 | 0.84 | 2.14 | 0.75 |
| K=4 | 0.54 | 0.76 | 1.13 | 0.81 | 0.61 | 0.72 |
| K=5 | 0.21 | 0.77 | 0.08 | 0.80 | 0.57 | 0.78 |
| K=6 | 0.08 | 0.76 | 0.19 | 0.78 | 0.15 | 0.75 |
| K=7 | 0.06 | 0.75 | 0.11 | 0.77 | 0.09 | 0.74 |
| K=8 | 0.04 | 0.74 | 0.07 | 0.78 | 0.08 | 0.72 |
| K=9 | 0.02 | 0.76 | 0.01 | 0.79 | 0.02 | 0.73 |
| K=10 | 0.02 | 0.74 | 0.07 | 0.78 | 0.06 | 0.73 |
"

"

"

"
"
"

| 1 | SINGH S. Critical reasons for crashes investigated in the national motor vehicle crash causation survey[J]. Traffic Safety Facts - Crash Stats, 2015. |
| 2 | PETRIDOU E, MOUSTAKI M. Human factors in the causation of road traffic crashes[J]. European Journal of Epidemiology, 2000, 16(9). |
| 3 | ZHU B, HAN J, ZHAO J, et al. Combined hierarchical learning framework for personalized automatic lane-changing[J]. IEEE Transactions on Intelligent Transportation Systems, 2021,22(10):6275-6285. |
| 4 | YI R, STEVEN E, YIWEI W, et al. How shall I drive? interaction modeling and motion planning towards empathetic and socially-graceful driving[J]. CoRR, 2019, abs/1901.10013. |
| 5 | CAO S, SAMUEL S, MURZELLO Y, et al. Hazard perception in driving: a systematic literature review[J]. Transportation Research Record, 2022:03611981221096666. |
| 6 | WANG J Q, HUANG H, LI YANG, et al. Driving risk assessment based on naturalistic driving study and driver attitude questionnaire analysis[J]. Accident Analysis and Prevention, 2020, 145. |
| 7 | ASADAMRAJI M, SAFFARZADEH M, ROSS V, et al. A novel driver hazard perception sensitivity model based on drivers’ characteristics: a simulator study[J]. Traffic Injury Prevention, 2019, 20(5):492-497. |
| 8 | MORAN C, BENNETT N, PRABHAKHAR P. Road user hazard perception tests: a systematic review of current methodologies[J]. Accident Analysis and Prevention, 2019, 129. |
| 9 | STRICKLAND M, FAINEKOS G, AMOR H B. Deep predictive models for collision risk assessment in autonomous driving[C]. 2018 IEEE International Conference on Robotics and Automation (ICRA), 2018:4685-4692. |
| 10 | WAGNER S, GROH K, KUHBECK T, et al. Using time-to-react based on naturalistic traffic object behavior for scenario-based risk assessment of automated driving[C]. 2018 IEEE Intelligent Vehicles Symposium (IV), 2018:1521-1528. |
| 11 | LI M, CHEN S, CHEN X, et al. Symbiotic graph neural networks for 3D skeleton-based human action recognition and motion prediction[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(6):3316-3333. |
| 12 | ZÜRN J, VERTENS J, BURGARD W. Lane graph estimation for scene understanding in urban driving[J]. IEEE Robotics and Automation Letters, 2021, 6(4):8615-8622. |
| 13 | GAO Y, LI Y F, LIN Y, et al. Deep learning on knowledge graph for recommender system: a survey[J]. arXiv Preprint arXiv:, 2020. |
| 14 | YAQIONG Q, XIANGYANG L, CHENLIANG L, et al. Heterogeneous graph-based joint representation learning for users and POIs in location-based social network[J]. Information Processing and Management, 2020, 57(2). |
| 15 | YURTSEVER E, YAMAZAKI S, MIYAJIMA C, et al. Integrating driving behavior and traffic context through signal symbolization for data reduction and risky lane change detection[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(3):242-253. |
| 16 | NILS M K, FREDRIK D J, CHRISTOPHER M. A survey on graph kernels[J]. Applied Network Science, 2020, 5(12). |
| 17 | BORGWARDT K M, KRIEGEL H, VISHWANATHAN S V N, et al. Graph kernels for disease outcome prediction from protein-protein interaction networks[J]. Pacific Symposium on Biocomputing. Pacific Symposium on Biocomputing, 2007. |
| 18 | BORGWARDT K M, KRIEGEL H P. Shortest-path kernels on graphs[C]. Fifth IEEE International Conference on Data Mining (ICDM'05), 2005. |
| 19 | GOVER J C. A general coefficient of similarity and some of its properties[J]. Biometrics, 1971, 27(4). |
| 20 | CHEN Yiping, WANG Jingkang, LI Jonathan, et al. LiDAR-Video driving dataset: learning driving policies effectively[C]. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2018:5870-5878. |
| 21 | ALLISON E C, JESSICA H, MICHAEL J K, et al. Prevalence of teen driver errors leading to serious motor vehicle crashes[J]. Accident Analysis and Prevention, 2010, 43(4). |
| 22 | CLARA M M, MIRA H, WANG F Y, et al. Driving style recognition for intelligent vehicle control and advanced driver assistance: a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(3):666-676. |
| 23 | ARANGANAYAGI S, THANGAVEL K. Clustering categorical data using silhouette coefficient as a relocating measure[C]. International Conference on Computational Intelligence and Multimedia Applications (ICCIMA 2007), 2007:13-17. |
| 24 | OLSEN E C B. Modeling slow lead vehicle lane changing[D]. Virginia Polytechnic Institute and State University, 2003. |
| 25 | 刘贵如, 周鸣争, 王陆林, 等. 城市工况下最小安全车距控制模型和避撞算法[J]. 汽车工程, 2016, 38(10):1200-1205,1176. |
| LIU G R, ZHOU M Z, WANG L L, et al. Control model for minimum safe inter-vehicle distance and collision avoidance algorithm in urban traffic condition[J]. Automotive Engineering, 2016, 38(10):1200-1205,1176. | |
| 26 | LI Jinghang, LU Chao, XU Youzhi, et al. Manifold learning for lane-changing behavior recognition in urban traffic[C]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC), 2019:3663-3668. |
| [1] | Biao Yang, Zhiwen Wei, Rongrong Ni, Hai Wang, Yingfeng Cai, Changchun Yang. Efficient Pedestrian Crossing Intention Anticipation Based on Action-Conditioned Interaction [J]. Automotive Engineering, 2024, 46(1): 29-38. |
| [2] | Jiqing Chen,Zihan Li,Fengchong Lan,Xinping Jiang,Wei Pan,Jikai Chen. Real-Vehicle Battery Health State Estimation Based on Nonlinear Reduced-Dimensional IC Features [J]. Automotive Engineering, 2023, 45(2): 199-208. |
| [3] | Junzhao Jiang,Wenhao Yang,Bin Peng,Ting Guo,Yekai Xu,Guozhuo Wang. Driving Range Prediction of Fuel Cell Vehicles Based on Energy Consumption Weighting Strategy [J]. Automotive Engineering, 2023, 45(12): 2357-2365. |
| [4] | Zhicheng He,Zejun Xie,Kan Liu,Enlin Zhou,Qian Tang,Yuanyi Huang. Collaborative Design Optimization of Pure Electric Vehicle Drivetrain and Motor Structure Parameters [J]. Automotive Engineering, 2023, 45(11): 2113-2122. |
| [5] | Yubo Lian,Heping Ling,Junbin Wang,Hua Pan,Zhao Xie. A Real-time Thermal Runaway Detection Method of Power Battery Based on Guassian Mixed Model and Hidden Markov Model [J]. Automotive Engineering, 2023, 45(1): 139-146. |
| [6] | Jian Zhao,Yaxin Li,Jing Tong,Bing Zhu,Weixiang Wu,Bohua Sun,Jiayi Han. Cross-Country Road Classification Method Based on Vehicle Dynamic Response Characteristics [J]. Automotive Engineering, 2022, 44(6): 909-918. |
| [7] | Jing Huang,Yang Peng,Ye Huang,Xiaoyan Peng. Evaluation of Driver's Mental Load State Considering the Influence of Noisy Labels [J]. Automotive Engineering, 2022, 44(5): 771-777. |
| [8] | Jie Hu,Xueling Zhu,Chen He,Guangyu Yang. Prediction on Battery State of Health of Electric Vehicles Based on Real Vehicle Data [J]. Automotive Engineering, 2021, 43(9): 1291-1299. |
| [9] | Yizhan Xie,Ximing Cheng. Review of State Estimation of Lithium-ion Battery with Machine Learning [J]. Automotive Engineering, 2021, 43(11): 1720-1729. |
| [10] | Jie Hu,Zhiwen Gao. A Data-driven SOC Prediction Scheme for Traction Battery in Electric Vehicles [J]. Automotive Engineering, 2021, 43(1): 1-9. |
| [11] | Yan Shixuan, Zhu Ping, Liu Zhao. Research on Vehicle Fault Prediction Scheme Based on Improved LightGBM Model [J]. Automotive Engineering, 2020, 42(6): 815-819. |