Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (12): 1797-1808.doi: 10.19562/j.chinasae.qcgc.2022.12.001
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2022年
Dongjian Song,Bing Zhu,Jian Zhao( ),Jiayi Han,Yanchen Liu
),Jiayi Han,Yanchen Liu
Received:2022-04-29
Revised:2022-06-06
Online:2022-12-25
Published:2022-12-22
Contact:
Jian Zhao
E-mail:zhaojian@jlu.edu.cn
Dongjian Song,Bing Zhu,Jian Zhao,Jiayi Han,Yanchen Liu. Human-Like Behavior Decision-Making of Intelligent Vehicles Based on Driving Behavior Generation Mechanism[J].Automotive Engineering, 2022, 44(12): 1797-1808.
"


"
"
"
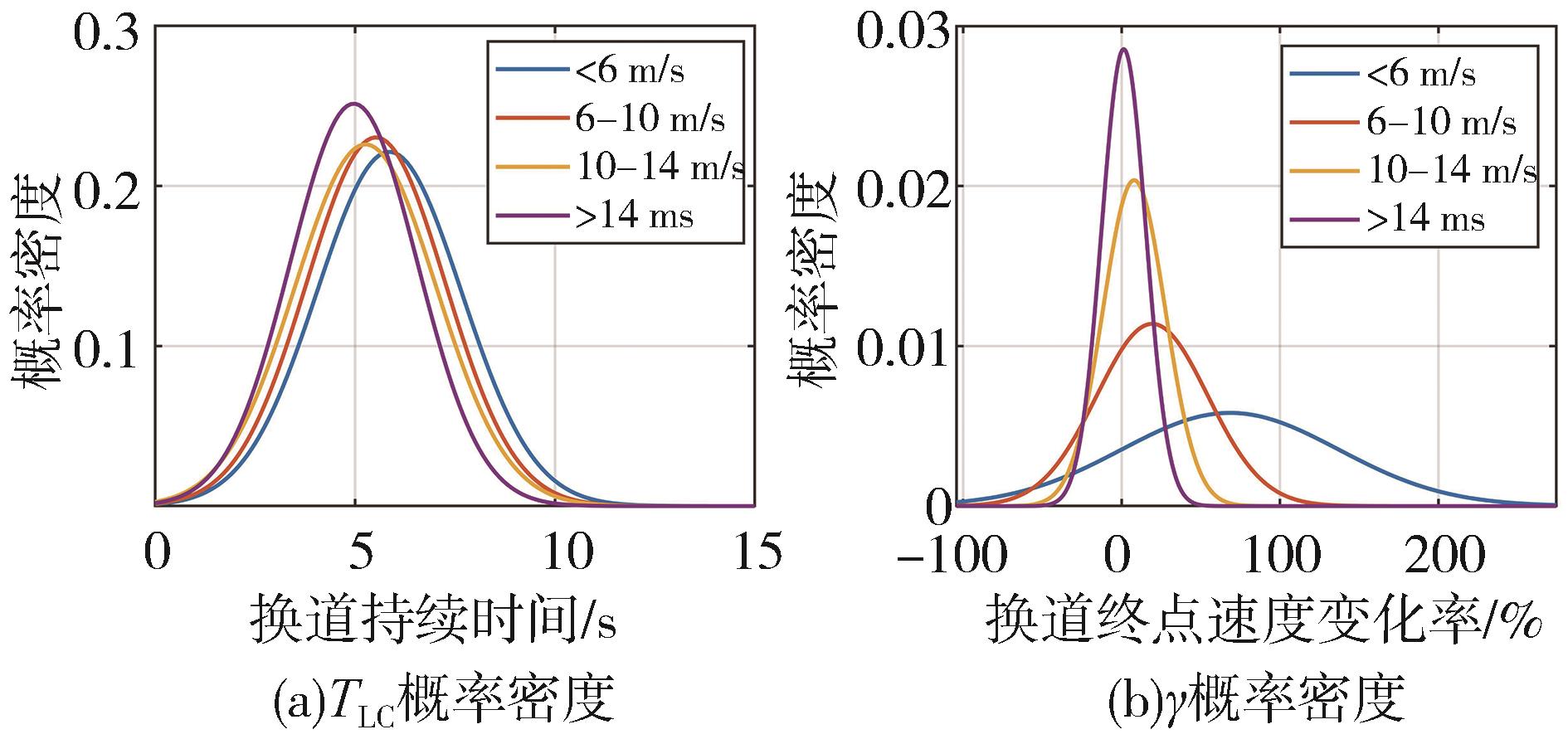
| 初始速度区间 | ||||
|---|---|---|---|---|
| <6 m/s | 5.858 | 1.802 | 68.516 | 68.522 |
| 6-10 m/s | 5.525 | 1.732 | 19.357 | 35.044 |
| 10-14 m/s | 5.266 | 1.765 | 7.927 | 15.590 |
| >14 m/s | 4.971 | 1.744 | 1.341 | 13.972 |
"
| 变量 | 取值粒度 | 初始速度区间 | |||
|---|---|---|---|---|---|
| <6 m/s | 6-10 m/s | 10-14 m/s | >14 m/s | ||
| 1 | [ | ||||
| 10 | [70,200] | [50,90] | [ | [ | |
| 预期轨迹数量 | 168 | 90 | 42 | 36 | |
"
"
"
| 预测时窗长度/s | RMSE/m |
|---|---|
| 3 | 0.693 4 |
| 4 | 0.943 7 |
| 5 | 1.346 2 |
| 6 | 1.873 6 |
| 7 | 3.342 2 |
| 8 | 4.152 5 |
"
"
"
"
| 策略 | 行为决策准确率/% | 行为决策时间误差/s | ||
|---|---|---|---|---|
| 训练集 | 测试集 | 训练集 | 测试集 | |
| HBDS | 93.72 | 92.50 | 0.9 | 1.1 |
| HBDS-TTC | 88.46 | 86.92 | 1.3 | 2.1 |
"
是否基于统计学 规律进行压缩 | 是否基于安全 约束进行剪枝 | 策略收敛所需 平均回合数 |
|---|---|---|
| 是 | 是 | 141 |
| 否 | 是 | 267 |
| 是 | 否 | 172 |
| 否 | 否 | 295 |
"
| 策略 | 行为决策准确率/% | 行为决策时间误差/s | ||
|---|---|---|---|---|
| 训练集 | 测试集 | 训练集 | 测试集 | |
| HBDS | 93.72 | 92.50 | 0.9 | 1.1 |
| HBDS-WP | 82.58 | 81.34 | 1.8 | 2.7 |
"
| 策略 | 行为决策准确率/% | 行为决策时间误差/s | ||
|---|---|---|---|---|
| 训练集 | 测试集 | 训练集 | 测试集 | |
| HBDS | 93.72 | 92.50 | 0.9 | 1.1 |
| FSM | 78.63 | 69.47 | 2.2 | 2.8 |
| DQN | 84.27 | 82.36 | 1.8 | 2.3 |
"
"
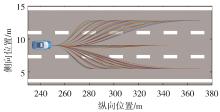
| 换道轨迹持续时间/s | 轨迹终点速度/(m·s-1) | 轨迹纵向跨度/m |
|---|---|---|
| 0.34 | 1.72 | 4.87 |
| 1 | LI D Y, GAO H B. A hardware platform framework for an intelligent vehicle based on a driving brain[J]. Engineering, 2018, 4(4): 464-470. |
| 2 | ZHU B, JIANG Y D, ZHAO J, et al. Typical driving styles oriented personalized adaptive cruise control design based on human driving data[J]. Transportation Research Part C: Emerging Technologies, 2019, 100: 274-288. |
| 3 | YANG Z, FENG Y H, LIU H X. A cooperative driving framework for urban arterials in mixed traffic conditions[J]. Transportation Research Part C: Emerging Technologies, 2021, 124: 274-288. |
| 4 | 冀杰,黄岩军,李云伍,等. 基于有限状态机的车辆自动驾驶行为决策分析[J].汽车技术,2018(12):1-7. |
| JI J, HUANG Y J, LI Y W, et al. Decision making analysis of autonomous driving behaviors for intelligent vehicles based on finite state machine[J]. Automobile Technology,2018(12):1-7. | |
| 5 | YU H T, TSENG H E, LANGARI R. A human-like game theory-based controller for automatic lane changing[J]. Transportation Research Part C: Emerging Technologies, 2018, 88: 140-158. |
| 6 | 何艳侠,尹慧琳,夏鹏飞. 基于环境态势评估的智能车自主变道决策机制[J]. 汽车工程,2018,40(9):1048-1053. |
| HE Y X, YIN H L, XIA P F. Decision-making mechanism of autonomous lane-change for intelligent vehicles based on environment situation assessment[J]. Automotive Engineering, 2018, 40(9): 1048-1053. | |
| 7 | BALAL E, CHEU R L, SARKODIE-GYAN T. A binary decision model for discretionary lane changing move based on fuzzy inference system[J]. Transportation Research Part C: Emerging Technologies, 2016, 67: 47-61. |
| 8 | CHEN Y P, WANG J K, LI J, et al. LiDAR-video driving dataset: Learning driving policies effectively[C]. 2018 Conference on Computer Vision and Pattern Recognition (CVPR), IEEE/CVF, 2018: 5870-5878. |
| 9 | ZHU B, HAN J Y, ZHAO J, et al. Combined hierarchical learning framework for personalized automatic lane-changing[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(10): 6275-6285. |
| 10 | MIRCHEVSKA B,PEK C,WERLING M,et al. High⁃level decision making for safe and reasonable autonomous lane changing using reinforcement learning[C]. 2018 21st International Conference on Intelligent Transportation Systems(ITSC). IEEE,2018:2156-2162. |
| 11 | 高振海,闫相同,高 菲,等. 仿驾驶员DDPG汽车纵向自动驾驶决策方法[J]. 汽车工程,2021,43(12):1737-1744. |
| GAO Z H, YAN X T, GAO F, et al. A driver-like decision-making method for longitudinal autonomous driving[J]. Automotive Engineering, 2021,43(12):1737-1744. | |
| 12 | 宋晓琳,盛 鑫,曹昊天,等. 基于模仿学习和强化学习的智能车辆换道行为决策[J]. 汽车工程,2021,43(1):59-67. |
| SONG X L, SHENG X, CAO H T, et al. Lane⁃change behavior decision⁃making of intelligent vehicle based on imitation learning and reinforcement learning[J]. Automotive Engineering, 2021, 43(1): 59-67. | |
| 13 | XU D H, DING Z Z, HE X, et al. Learning from naturalistic driving data for human-like autonomous highway driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(12): 7341-7354. |
| 14 | SILVER D, BAGNELL J A, STENTZ A. Learning autonomous driving styles and maneuvers from expert demonstration[J]. Experimental Robotics, 2013, 88: 371–386. |
| 15 | NAUMANN M, SUN L T, ZHAN W, et al. Analyzing the suitability of cost functions for explaining and imitating human driving behavior based on inverse reinforcement learning[C]. International Conference on Robotics and Automation (ICRA), IEEE, 2020: 5481-5487. |
| 16 | FERNANDO T, DENMAN S, SRIDHARAN S, et al. Deep inverse reinforcement learning for behavior prediction in autonomous driving: accurate forecasts of vehicle motion[J]. IEEE Signal Processing Magazine, 2021, 38(1): 87-96. |
| 17 | WU Z, SUN L T, ZHAN W, et al. Efficient sampling-based maximum entropy inverse reinforcement learning with application to autonomous driving[J]. IEEE Robotics and Automation Letters, 2020, 5(4): 5355–5362. |
| 18 | HUANG Z Y, WU J D, LV C. Driving behavior modeling using naturalistic human driving data with inverse reinforcement learning[J]. IEEE Transactions on Intelligent Transportation Systems, Early Access, 2021, doi: 10.1109/TITS.2021.3088935. |
| 19 | SUN R Y, HU S, ZHAO H J, et al. Human-like highway trajectory modeling based on inverse reinforcement learning[C]. 2019 Intelligent Transportation Systems Conference (ITSC), IEEE, 2019: 1482-1489. |
| 20 | WULFMEIER M, RAO D, WANG D Z, et al. Large-scale cost function learning for path planning using deep inverse reinforcement learning[J]. The International Journal of Robotics Research, 2017, 36(10): 1073–1087. |
| 21 | ZIEBART B D, MAAS A, BAGNELL J A, et al. Maximum entropy inverse reinforcement learning[C]. 23rd AAAI Conference Artificial Intelligence, 2008, 8: 1433–1438. |
| 22 | TREIBER M, HENNECKE A, HELBING D. Congested traffic states in empirical observations and microscopic simulations[J]. Physical Review E, 2000, 62(2): 1805–1824. |
| 23 | JONES K, BENTLEY B E, WOOD J M, et al. Application of parallax for the measurement of visibility distances in the open-road environment[J]. International Archives of Photogrammetry and Remote Sensing, 1998, 33(5): 74-79. |
| 24 | Federal Highway Adminnistration. Ngsim-next generation simulation [EB/OL]. http://ops. fhwa. dot. Gov/reafficanalysistools/ngsim. |
| 25 | YAO W, ZENG Q Q, LIN Y P, et al. On-road vehicle trajectory collection and scene-based lane change analysis: Part II[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(1): 206-220. |
| [1] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [2] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [3] | Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention [J]. Automotive Engineering, 2023, 45(8): 1448-1456. |
| [4] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |
| [5] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [6] | Zixian Li,Shiju Pan,Yuan Zhu,Binbing He,Youchun Xu. Semi-active Suspension Control for Intelligent Vehicles Based on State Feedback and Preview Feedforward [J]. Automotive Engineering, 2023, 45(5): 735-745. |
| [7] | Shiju Pan,Yongle Li,Zixian Li,Binbing He,Yuan Zhu,Youchun Xu. Path Following Method of Intelligent Vehicles Based on Improved Pure Tracking [J]. Automotive Engineering, 2023, 45(1): 1-8. |
| [8] | Wenbo Shao,Jun Li,Yuxin Zhang,Hong Wang. Key Technologies to Ensure the Safety of the Intended Functionality for Intelligent Vehicles [J]. Automotive Engineering, 2022, 44(9): 1289-1304. |
| [9] | Zihao Wang,Yingfeng Cai,Hai Wang,Long Chen,Xiaoxia Xiong. Surrounding Multi-Target Trajectory Prediction Method Based on Monocular Visual Motion Estimation [J]. Automotive Engineering, 2022, 44(9): 1318-1326. |
| [10] | Zewu Deng,Zhaozheng Hu,Zhe Zhou, LiuYulin,Chao Peng. Intelligent Vehicle Positioning by Fusing LiDAR and Double-layer Map Model [J]. Automotive Engineering, 2022, 44(7): 1018-1026. |
| [11] | Xinyu Chen,Lijun Qian,Qidong Wang. Eco-driving Control at Signalized Intersections with Consideration of Time Delay [J]. Automotive Engineering, 2022, 44(7): 960-968. |
| [12] | Zhenhai Gao,Xiangtong Yan,Fei Gao. A Decision-making Method for Longitudinal Autonomous Driving Based on Inverse Reinforcement Learning [J]. Automotive Engineering, 2022, 44(7): 969-975. |
| [13] | Jian Zhao,Dongjian Song,Bing Zhu,Hangzhe Wu,column:Han Jiayi,Yuxiang Liu. Traffic Vehicles Intention Recognition Method Driven by Data and Mechanism Hybrid [J]. Automotive Engineering, 2022, 44(7): 997-1008. |
| [14] | Tian Yuan,Xuan Zhao,Rui Liu,Qiang Yu,Xichan Zhu,Shu Wang. An Analysis on Longitudinal Driving Characteristics in Urban Intersection Based on Natural Driving Data [J]. Automotive Engineering, 2022, 44(6): 821-830. |
| [15] | Xiujian Yang,Xinyu Yin,Jin Gao. Interference Suppression Characteristics of Vehicle Platoon with Periodic Type Control Structure [J]. Automotive Engineering, 2022, 44(12): 1834-1843. |