Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (12): 1809-1817.doi: 10.19562/j.chinasae.qcgc.2022.12.002
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2022年
Previous Articles Next Articles
Chaoyang Jiang( ),Tianran Lan,Xiaoni Zheng,Jiulong Gao,Xuetong Ye
),Tianran Lan,Xiaoni Zheng,Jiulong Gao,Xuetong Ye
Received:2022-07-04
Revised:2022-07-26
Online:2022-12-25
Published:2022-12-22
Contact:
Chaoyang Jiang
E-mail:cjiang@bit.edu.cn
Chaoyang Jiang,Tianran Lan,Xiaoni Zheng,Jiulong Gao,Xuetong Ye. Distributed Multi-vehicle Collaborative Visual SLAM System[J].Automotive Engineering, 2022, 44(12): 1809-1817.
"
"

"
"

"
"
"

"

"
"
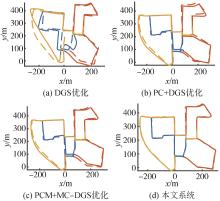
| 算法步骤 | 最大值/m | 平均值/m | RMSE/m |
|---|---|---|---|
| DGS | 61.48 | 15.33 | 20.25 |
| PCM+DGS | 12.22 | 3.97 | 3.65 |
| PCM+MC-DGS | 11.55 | 3.18 | 2.95 |
| 本文系统 | 3.50 | 1.91 | 2.25 |
"
| SLAM系统 | RMSE/m | |
|---|---|---|
| 单车SLAM | VINS-Fusion | 11.65 |
| ORB-SLAM2 | 6.82 | |
协同SLAM | DSLAM | 4.00 |
| DOOR-SLAM | 8.00 | |
| 本文系统 | 2.25 | |
"
"
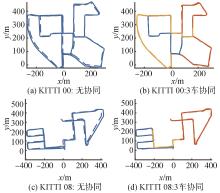
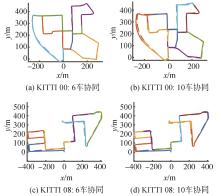
| 数据集 | 轨迹长度/m | 本文系统/m | DGS+PCM/m | ORB-SLAM2/m | VINS-Fusion/m |
|---|---|---|---|---|---|
| KITTI 00 城镇 | 3 724.187 | 2.25 | 3.65 | 6.82 | 11.65 |
| KITTI 01 高速 | 2 453.203 | 5.19 | 5.74 | 10.30 | 6.78 |
| KITTI 04 高速 | 393.645 | 0.28 | 0.28 | 0.17 | 0.19 |
| KITTI 07 城镇 | 694.697 | 0.48 | 0.49 | 0.51 | 0.97 |
| KITTI 08 城镇 | 3 222.795 | 1.47 | 1.40 | 3.58 | 9.89 |
"
"
"
| 1 | BRESSON G, ALSAYED Z, YU L, et al. Simultaneous localization and mapping: a survey of current trends in autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2017, 2(3): 194-220. |
| 2 | CADENA C, CARLONE L, CARRILLO H, et al. Past, present, and future of simultaneous localization and mapping: toward the robust-perception age[J]. IEEE Transactions on Robotics, 2016, 32(6): 1309-1332. |
| 3 | 曹立波, 陈峥, 颜凌波, 等. 基于RFID、视觉和UWB的车辆定位系统[J]. 汽车工程, 2017, 39(2): 225-231. |
| CAO L B, CHEN Z, YAN L B, et al. Vehicle positioning system based on RFID, vision and UWB[J]. Automotive Engineering, 2017, 39(2): 225-231. | |
| 4 | 蔡英凤, 陆子恒, 李祎承, 等. 基于多传感器融合的紧耦合SLAM系统[J]. 汽车工程, 2022, 44(3): 350-361. |
| CAI Y F, LU Z H, LI Y C, et al. Tightly coupled SLAM system based on multi-sensor fusion[J]. Automotive Engineering, 2022, 44(3): 350-361. | |
| 5 | HUANG G, HU Z Z, TAO Q W, et al. Improved intelligent vehicle self-localization with integration of sparse visual map and high-speed pavement visual odometry[J]. The Institution of Mechanical Engineers Part D-Journal of Automobile Engineering, 2021, 235(1): 177-187. |
| 6 | 胡玉文, 龚建伟, 姜岩, 等. 基于子地图的智能车辆同步定位与地图创建[J]. 汽车工程, 2015, 37(2): 224-229. |
| HU Y W, GONG J W, JIANG Y, et al. A sub-map-based simultaneous localization and mapping technique for intelligent vehicles[J]. Automotive Engineering, 2015, 37(2): 224-229. | |
| 7 | 孙宁, 闫梦如, 倪捷, 等. 基于GRI的多车协同定位研究[J]. 汽车工程, 2018, 40(4): 488-493,499. |
| SUN N, YAN M R, NI J, et al. A study on multi-vehicle cooperative positioning based on GRI[J]. Automotive Engineering, 2018, 40(4): 488-493,499. | |
| 8 | 段续庭, 田大新, 王云鹏. 基于V2X通信网络的车辆协同定位增强方法[J]. 汽车工程, 2018, 40(8): 947-951,959. |
| DUAN X T, TIAN D X, WANG Y P. Vehicle cooperative positioning enhancement method based on V2X communication networks[J]. Automotive Engineering, 2018, 40(8): 947-951,959. | |
| 9 | CAMPOS C, ELVIRA R, RODRíGUEZ J J G, et al. Orb-slam3: an accurate open-source library for visual, visual–inertial, and multimap slam [J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| 10 | QIN T, LI P, SHEN S. VINS-Mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. |
| 11 | SCHMUCK P, CHLI M. CCM‐SLAM: robust and efficient centralized collaborative monocular simultaneous localization and mapping for robotic teams[J]. Journal of Field Robotics, 2019, 36(4): 763-781. |
| 12 | KARRER M, SCHMUCK P, CHLI M. CVI-SLAM—collaborative visual-inertial SLAM[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 2762-2769. |
| 13 | SCHMUCK P, ZIEGLER T, KARRER M, et al. COVINS: visual-inertial SLAM for centralized collaboration[C]. 2021 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct). IEEE, 2021: 171-176. |
| 14 | BRESSON G, AUFRèRE R, CHAPUIS R. Consistent multi-robot decentralized slam with unknown initial positions[C]. Proceedings of the 16th International Conference on Information Fusion. IEEE, 2013: 372-379. |
| 15 | CUNNINGHAM A, INDELMAN V, DELLAERT F. DDF-SAM 2.0: consistent distributed smoothing and mapping[C]. 2013 IEEE International Conference on Robotics and Automation(ICRA). IEEE, 2013: 5220-5227. |
| 16 | TIAN Y, CHANG Y, ARIAS F H, et al. Kimera-multi: robust, distributed, dense metric-semantic SLAM for multi-robot systems[J]. IEEE Transactions on Robotics, 2022: 1-17. |
| 17 | CIESLEWSKI T, CHOUDHARY S, SCARAMUZZA D. Data-efficient decentralized visual SLAM[C]. 2018 IEEE International Conference on Robotics and Automation(ICRA). 2018: 2466-2473. |
| 18 | ARANDJELOVIC R, GRONAT P, TORII A, et al. NetVLAD: CNN architecture for weakly supervised place recognition[C]. IEEE Conference on Computer Vision and Pattern Recognition. 2016: 5297-5307. |
| 19 | LAJOIE P Y, RAMTOULA B, CHANG Y, et al. DOOR-SLAM: distributed, online, and outlier resilient SLAM for robotic teams[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 1656-1663. |
| 20 | AGARWAL P, TIPALDI G D, SPINELLO L, et al. Robust map optimization using dynamic covariance scaling[C]. 2013 IEEE International Conference on Robotics and Automation(ICRA). 2013: 62-69. |
| 21 | MANGELSON J G, DOMINIC D, EUSTICE R M, et al. Pairwise consistent measurement set maximization for robust multi-robot map merging[C]. 2018 IEEE International Conference on Robotics and Automation(ICRA). IEEE, 2018: 2916-2923. |
| 22 | HUANG Y, SHAN T, CHEN F, et al. DiSCo-SLAM: distributed scan context-enabled multi-robot LiDAR SLAM with two-stage global-local graph optimization [J]. IEEE Robotics and Automation Letters, 2021, 7(2): 1150-1157. |
| 23 | CHOUDHARY S, CARLONE L, NIETO C, et al. Distributed mapping with privacy and communication constraints: Lightweight algorithms and object-based models[J]. The International Journal of Robotics Research, 2017, 36(12): 1286-1311. |
| 24 | CARLONE L, ROSEN D M, CALAFIORE G, et al. Lagrangian duality in 3D SLAM: verification techniques and optimal solutions[C]. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). IEEE, 2015: 125-132. |
| [1] | Xinke Fu,Yingfeng Cai,Long Chen,Hai Wang,Qingchao Liu. Decision-Making for Autonomous Driving in Uncertain Environment [J]. Automotive Engineering, 2024, 46(2): 211-221. |
| [2] | Tao Lu,Xin Jin,Yifei Liao,Shengjie Huang,Yilin Yang,Guotao Xie,Xiaohui Qin. Visual SLAM Based on Jacobian Null-space Marginalization [J]. Automotive Engineering, 2023, 45(8): 1457-1467. |
| [3] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [4] | Yanyan Chen,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Efficient Automatic Driving Instance Segmentation Method Based on Detection [J]. Automotive Engineering, 2023, 45(4): 541-550. |
| [5] | Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles [J]. Automotive Engineering, 2023, 45(12): 2234-2241. |
| [6] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [7] | Long Chen,Chen Yang,Yingfeng Cai,Hai Wang,Yicheng Li. Pedestrian Crossing Intention Prediction Method Based on Multimodal Feature Fusion [J]. Automotive Engineering, 2023, 45(10): 1779-1790. |
| [8] | Fengchong Lan,Yingjie Liu,Jiqing Chen,Zhaolin Liu. Study on Motion Planning of Autonomous Vehicles in Cut-in Scenes Based on Dynamic Game Algorithm [J]. Automotive Engineering, 2023, 45(1): 9-19. |
| [9] | Yingfeng Cai,Ziheng Lu,Yicheng Li,Long Chen,Hai Wang. Tightly Coupled SLAM System Based on Multi-Sensor Fusion [J]. Automotive Engineering, 2022, 44(3): 350-361. |
| [10] | Jingwei Zhang,Tiejun Liu,Rengang Li,Dan Liu,Jinglin Zhan,Hongwei Kan. A Temporal Calibration Method for Multi-Sensor Fusion of Autonomous Vehicles [J]. Automotive Engineering, 2022, 44(2): 215-224. |
| [11] | Yuande Jiang,Bing Zhu,Xiangmo Zhao,Jian Zhao,Bingbing Zheng. Modeling of Traffic Vehicle Interaction for Autonomous Vehicle Testing [J]. Automotive Engineering, 2022, 44(12): 1825-1833. |
| [12] | Huei Peng. Autonomous Vehicles—the Remaining Challenges [J]. Automotive Engineering, 2021, 43(4): 451-458. |
| [13] | Xiangyang Xu,Wenhao Hu,Honglei Dong,Yan Wang,Lingyun Xiao,Penghui Li. Review of Key Technologies for Autonomous Vehicle Test Scenario Construction [J]. Automotive Engineering, 2021, 43(4): 610-619. |
| [14] | Rong Wang,Yafu Sun,Juan Song. Evaluation Method and Test Verification of Road Test Scenes for Autonomous Vehicles [J]. Automotive Engineering, 2021, 43(4): 620-628. |
| [15] | Zhe Liu,Yunkai Gao,Furong Xie. Study on Predictive Models for Door Slamming Sound Quality of an Electric Vehicle [J]. Automotive Engineering, 2021, 43(12): 1858-1864. |