Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (4): 620-628.doi: 10.19562/j.chinasae.qcgc.2021.04.020
Previous Articles Next Articles
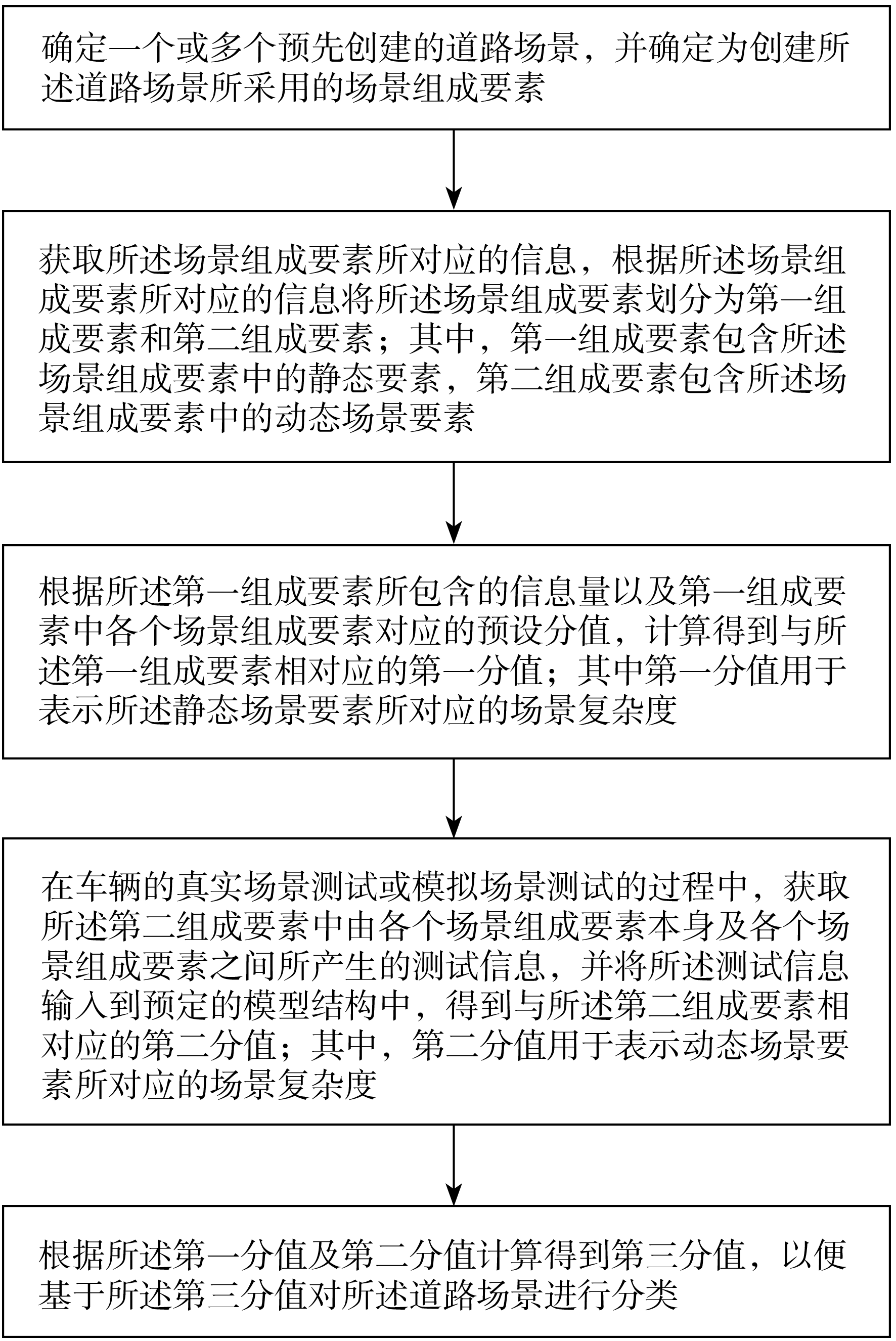
Rong Wang1( ),Yafu Sun2,Juan Song1
),Yafu Sun2,Juan Song1
Received:2020-07-07
Revised:2020-09-26
Online:2021-04-25
Published:2021-04-23
Contact:
Rong Wang
E-mail:wangrong@cstc.org.cn
Rong Wang,Yafu Sun,Juan Song. Evaluation Method and Test Verification of Road Test Scenes for Autonomous Vehicles[J].Automotive Engineering, 2021, 43(4): 620-628.
"
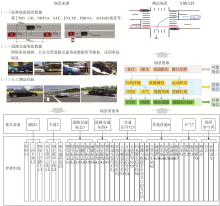
| 基本要素 | 要素组成 |
|---|---|
| 路段 | 双向、三向(T型)、四向(十字路口) |
| 车道 | 两车道(中心线)、四车道(中心线)、单车道(环岛) |
| 道路交通标志 | 警告标志、禁令标志、指示标志、指路标志、施工标志、辅助标志 |
| 道路交通标线 | 指示标线、禁止标线、警告标线 |
| 交通信号灯 | 机动车信号灯、非机动车信号灯、人行横道信号灯、方向指示信号灯、车道信号灯、闪光警告信号灯、道路与铁路平面交叉道口信号灯 |
| 其他设施 | 收费站、公共汽车站台、减速带、停车场、充电站、加油站、锥形桶 |
| 天气 | 白天、黑夜、晴天、雨雪雾 |
场景 参与者 | 测试车、机动车、非机动车、行人、动物、其他障碍物、移动式交通管控设施 |
"

"
"

"

"


"


"

"

"
"
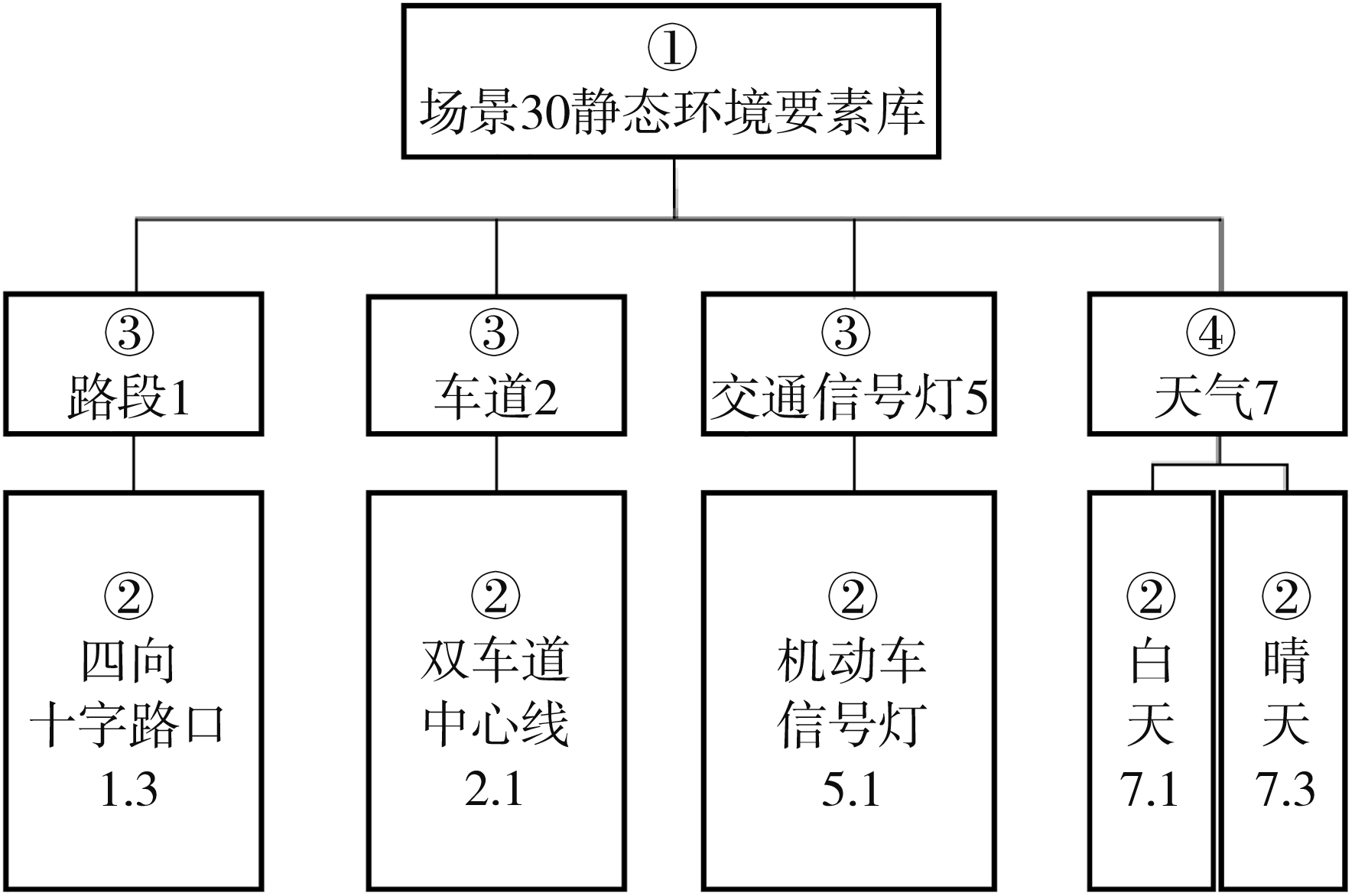
| 节点分组 | 输入 节点数 | 输出节点数 | 节点编号 | 相同输入输出的节点数 |
|---|---|---|---|---|
| ① | 0 | 4 | {0} | 1 |
| ② | 1 | 0 | {1.3,2.1,5.1,7.1,7.3} | 5 |
| ③ | 1 | 1 | {1,2,5} | 3 |
| ④ | 1 | 2 | {7} | 1 |
| 总计 | 10 | |||
"
| 一级指标 | 二级指标 | 分数(0-10) |
|---|---|---|
| 路段 | 双向 | 5 |
| 三向 | 6 | |
| 四向 | 7 | |
| 车道 | 双车道(中心线) | 5 |
| 四车道(中心线) | 6 | |
| 单车道(环岛) | 7 | |
| 道路交通标志 | 警告标志 | 5 |
| 禁令标志 | 4 | |
| 指示标志 | 5 | |
| 指路标志 | 6 | |
| 施工标志 | 7 | |
| 辅助标志 | 8 | |
| 道路交通标线 | 指示标线 | 2 |
| 禁止标线 | 2 | |
| 警告标线 | 5 | |
| 交通信号灯 | 机动车信号灯 | 6 |
| 非机动车信号灯 | 6 | |
| 人行横道信号灯 | 7 | |
| 方向指示信号灯 | 7 | |
| 车道信号灯 | 6 | |
| 闪光警告信号灯 | 6 | |
| 道路与铁路平台交叉口信号灯 | 7 | |
| 其他设施 | 收费站 | 8 |
| 公共汽车站 | 5 | |
| 减速带 | 5 | |
| 其他设施 | 停车场 | 7 |
| 充电站 | 6 | |
| 加油站 | 5 | |
| 锥形桶 | 4 | |
| 天时 | 白天 | 3 |
| 黑夜 | 6 | |
| 晴天 | 3 | |
| 雨雪雾 | 6 |
"
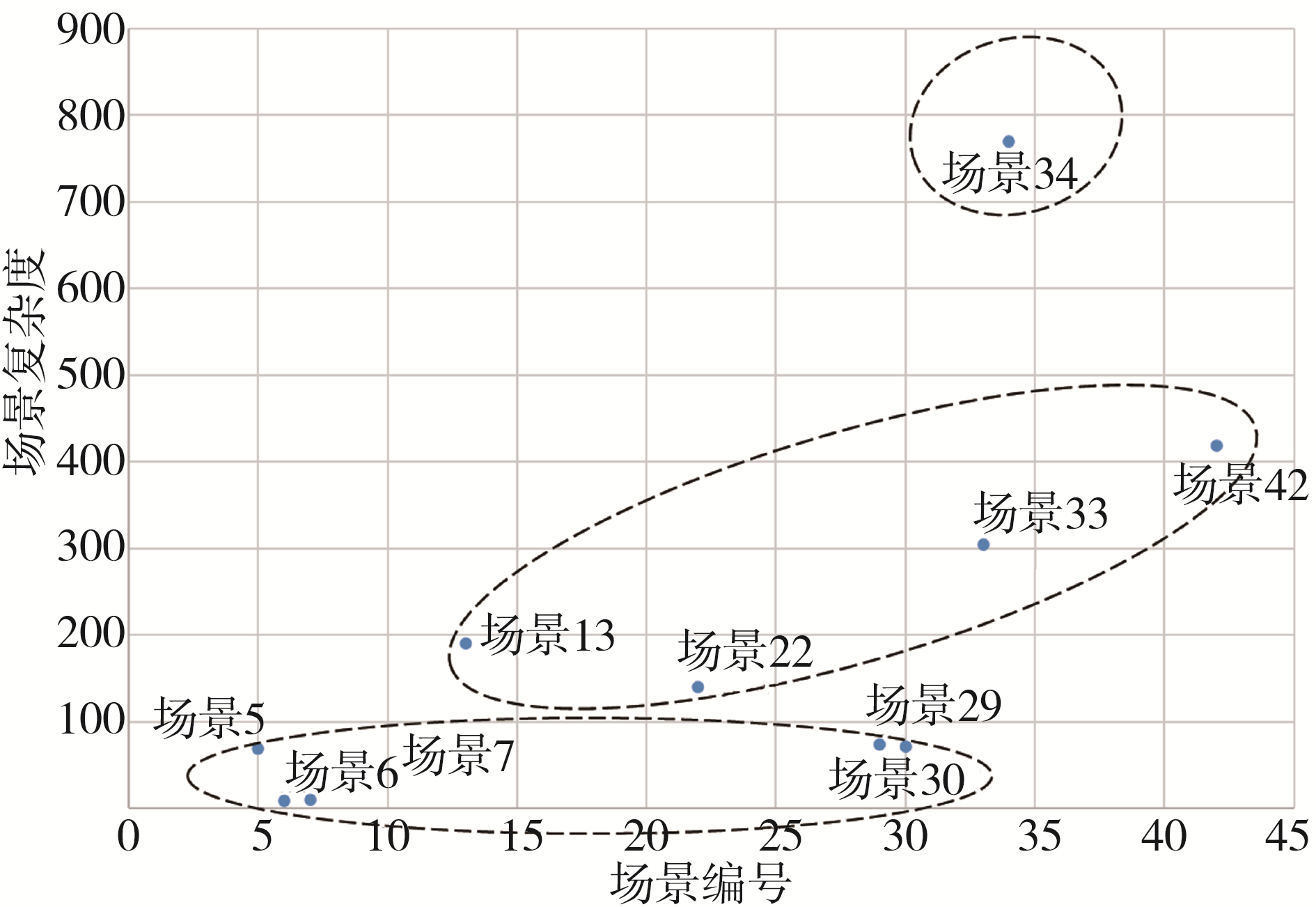
| 场景编号 | 静态场景复杂度 | 动态场景复杂度 | 场景复杂度 |
|---|---|---|---|
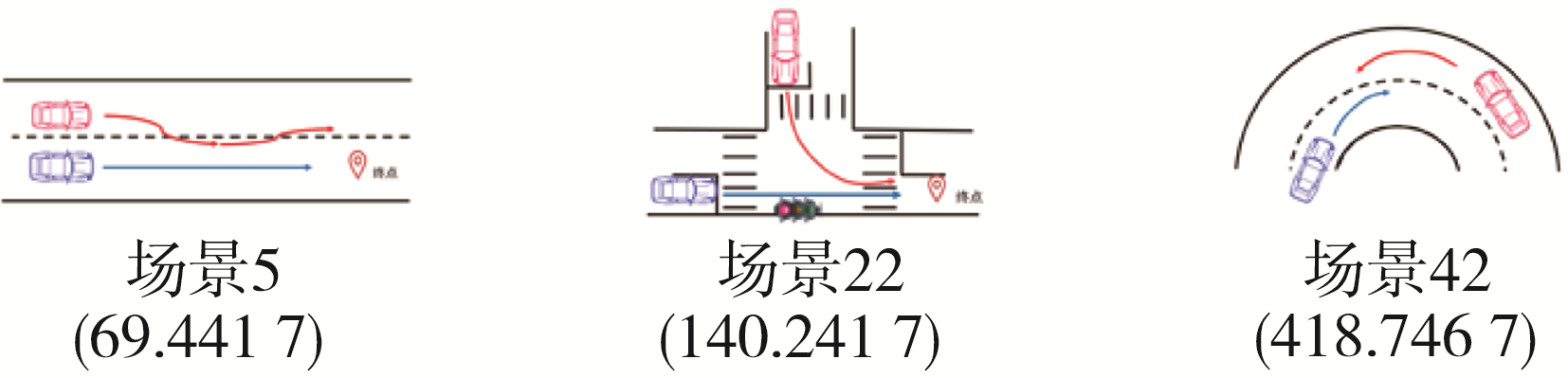
| 5 | 9.374 9 | 7.407 2 | 69.441 7 |
| 6 | 8.266 9 | 1.000 0 | 8.266 9 |
| 7 | 9.866 1 | 1.051 2 | 10.371 2 |
| 13 | 9.374 9 | 20.309 8 | 190.402 3 |
| 22 | 9.619 5 | 14.578 9 | 140.241 7 |
| 29 | 9.866 1 | 9.001 5 | 74.414 5 |
| 30 | 9.866 1 | 7.267 3 | 71.699 9 |
| 33 | 9.866 1 | 30.612 1 | 304.657 7 |
| 34 | 9.866 1 | 78.054 6 | 770.094 4 |
| 42 | 9.374 9 | 44.666 8 | 418.746 7 |
"

"


"

"

| 1 | WANG R, SONG J, et al. Design and validation of a prototype underlying control system for autonomous vehicles[C]. SAE Paper 2019-01-5062. |
| 2 | JOSHUA L E, FRANK B, et al. A novel method to evaluate the safety of highly automated vehicles [J]. NHTSA, 2017, 17-0076. |
| 3 | WASSIM G N, DAVID L S. Definition of a pre-crash scenario typology for vehicle safety research[J]. NHTSA, 2017, 07-0412. |
| 4 | BRÜHNING B, et al. Code of practice for evaluation of road traffic accidents[M]. Berlin: German Insurance Association, 2006. |
| 5 | HERMAN W. Automated vehicle symposium San Francisco[C]. San Francisco: FZD, 2016. |
| 6 | 智能网联汽车道路测试管理规范(试行) [S]. 北京:工业和信息化部、公安部、交通运输部,2018. |
| Management standard for automated and connected vehicles road test(trial implementation)[S].Beijing: Ministry of Industry and Information Technology, Ministry of Public Security, Ministry of Transportation, 2018. | |
| 7 | 智能网联汽车自动驾驶功能测试规程 [S]. 北京:中国智能网联汽车产业创新联盟、全国汽标委智能网联汽车分技术委员会,2018. |
| Test procedure for intelligent and connected vehicle self-driving function[S]. Beijing: China Intelligent and Connected Vehicle Industry Innovation Alliance, National Automotive Standards Commission Intelligent and Connected Vehicle Sub-Technical Committee, 2018. | |
| 8 | 自动驾驶车辆测试道路要求 [S]. 北京:中关村智通智能交通产业联盟,2019. |
| Road test requirements for self-driving vehicles[S]. Beijing: Zhongguancun Intelligent Transportation Industry Alliance, 2019. | |
| 9 | 张昕. 无人车通过特殊区域智能行为评价研究[D].北京: 北京理工大学机械与车辆学院, 2015. |
| ZHANG X. Research on evaluation of intelligent behaviors through specials areas for unmanned ground vehicles[D]. Beijing: Beijing Institute of Technology Mechanical Engineering Department,2015. | |
| 10 | 王云鹏. 交通环境对道路安全影响的定量评价[J]. 吉林大学学报,2006,36(1):119-122. |
| WANG Y P. Quantitative assessment of influence of traffic environment on road safety[J]. Journal of Jilin University, 2006, 36(1):119-122. | |
| 11 | TILL M, GERRIT B, MARKUS M. Scenarios for development, test and validation of automated vehicles [J]. IEEE, 2018, 04-27 |
| 12 | GALEN E M, PAUL G S, SATYANDRA K G. Automated generation of diverse and challenging scenarios for test and evaluation of autonomous vehicles [C]. IEEE International Conference on Robotics and Automation, Singapore, 2017, 978-1-5090. |
| 13 | 北京市自动驾驶车辆道路测试报告(2019年)[R].北京智能车联产业创新中心,2020. |
| Road test report of self-driving vehicles in Beijing (2019)[R]. Beijing Intelligent Vehicle Association Industry Innovation Center,2020. | |
| 14 | TANG I, BRECKON T P. Automatic road environment classification[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(2):476-484. |
| 15 | NAUMANN M, LAUER M, STILLER C. Generating comfortable, safe and comprehensible trajectories for automated vehicles in mixed traffic, international conference on intelligent transportation systems [C]. ITSC, 2018. |
| 16 | TLIG M, MACHIN M, KERNEIS R, et al. Autonomous driving system: model based safety analysis[C]. 2018 48th Annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshops (DSN-W), Luxembourg, 2018. |
| 17 | ZHANG X, ZHAO Y, GAO L, et al. Evaluation framework and method of the intelligent behaviors of unmanned ground vehicles based on AHP scheme[J].Applied Mechanics and Materials, 2015,721: 476-480. |
| 18 | SUN Y, TAO G, XIONG G M, et al. The fuzzy⁃AHP evaluation method for unmanned ground vehicles [J]. Applied Mathematics & Information Sciences, 2013,7(2): 653-658. |
| 19 | 陈韬, 蔡博, 回春. 基于场景元素的智能网联汽车场景构建研究[J]. 公路与汽运, 2019(6):9-12. |
| CHEN T, CAI B, HUI C. Research on the construction of intelligent and connected vehicle scenarios based on scenario elements[J]. Highway and Automotive Applications, 2019(6):9-12. | |
| 20 | 自动驾驶车辆道路测试能力评估与方法 :T/CMAX116-01-2018 [S]. 北京:中关村智通智能交通产业联盟,2018. |
| Road test capability evaluation and method of self⁃driving vehicles :T/CMAX116-01-2018 [S]. Beijing: Zhongguancun Intelligent Transportation Industry Alliance,2018. | |
| 21 | 刘峰涛, 贺国光. 基于近似熵和统计复杂度的交通流复杂性测度[J]. 中国公路学报, 2007,20(4):108-112. |
| LIU F T, HE G G. Complexity measure of traffic flow based on approximate entropy and statistical complexity[J]. China Journal of Highway and Transport, 2007,20(4):108-112. | |
| 22 | 张海潮. 基于引力模型的道路交通环境复杂度研究[D]. 北京:北京理工大学, 2016. |
| ZHANG H C. Research on complexity of road traffic environment based on gravity model[D]. Beijing: Beijing Institute of Technology, 2016. | |
| 23 | 许虔虔. 驾驶人员风险引力模型优化及应用研究[D]. 昆明:昆明理工大学, 2017. |
| XU Q Q. Research on optimization and application of driver risk gravitation model[D]. Kunming: Kunming Institute of Technology, 2017. |
| [1] | Xinke Fu,Yingfeng Cai,Long Chen,Hai Wang,Qingchao Liu. Decision-Making for Autonomous Driving in Uncertain Environment [J]. Automotive Engineering, 2024, 46(2): 211-221. |
| [2] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [3] | Yanyan Chen,Hai Wang,Yingfeng Cai,Long Chen,Yicheng Li. Efficient Automatic Driving Instance Segmentation Method Based on Detection [J]. Automotive Engineering, 2023, 45(4): 541-550. |
| [4] | Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles [J]. Automotive Engineering, 2023, 45(12): 2234-2241. |
| [5] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [6] | Long Chen,Chen Yang,Yingfeng Cai,Hai Wang,Yicheng Li. Pedestrian Crossing Intention Prediction Method Based on Multimodal Feature Fusion [J]. Automotive Engineering, 2023, 45(10): 1779-1790. |
| [7] | Fengchong Lan,Yingjie Liu,Jiqing Chen,Zhaolin Liu. Study on Motion Planning of Autonomous Vehicles in Cut-in Scenes Based on Dynamic Game Algorithm [J]. Automotive Engineering, 2023, 45(1): 9-19. |
| [8] | Yingfeng Cai,Ziheng Lu,Yicheng Li,Long Chen,Hai Wang. Tightly Coupled SLAM System Based on Multi-Sensor Fusion [J]. Automotive Engineering, 2022, 44(3): 350-361. |
| [9] | Jingwei Zhang,Tiejun Liu,Rengang Li,Dan Liu,Jinglin Zhan,Hongwei Kan. A Temporal Calibration Method for Multi-Sensor Fusion of Autonomous Vehicles [J]. Automotive Engineering, 2022, 44(2): 215-224. |
| [10] | Chaoyang Jiang,Tianran Lan,Xiaoni Zheng,Jiulong Gao,Xuetong Ye. Distributed Multi-vehicle Collaborative Visual SLAM System [J]. Automotive Engineering, 2022, 44(12): 1809-1817. |
| [11] | Yuande Jiang,Bing Zhu,Xiangmo Zhao,Jian Zhao,Bingbing Zheng. Modeling of Traffic Vehicle Interaction for Autonomous Vehicle Testing [J]. Automotive Engineering, 2022, 44(12): 1825-1833. |
| [12] | Huei Peng. Autonomous Vehicles—the Remaining Challenges [J]. Automotive Engineering, 2021, 43(4): 451-458. |
| [13] | Xiangyang Xu,Wenhao Hu,Honglei Dong,Yan Wang,Lingyun Xiao,Penghui Li. Review of Key Technologies for Autonomous Vehicle Test Scenario Construction [J]. Automotive Engineering, 2021, 43(4): 610-619. |
| [14] |
Cai Yingfeng, Zang Yong, Sun Xiaoqiang, Chen Long, Wang Hai, Jiang Haobin & He Youguo.
A Research on Lateral Extendable Preview Switching Control System for Autonomous Vehicles [J]. , 2018, 40(9): 1032-1039. |
| [15] | Yang Zhendong, Gu Zhengqi, Xie Chao, Zhong Yiqi, Jiang Caimao & Zhang Qidong. An Investigation into Characteristics Discrepancy of Vehicle Sidewindow Buffeting Noise [J]. , 2018, 40(8): 981-988. |
|