Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (12): 2338-2347.doi: 10.19562/j.chinasae.qcgc.2023.12.016
Special Issue: 智能网联汽车技术专题-控制2023年
Previous Articles Next Articles
Zhicheng He1,Leihao Du2,Enlin Zhou1( ),Gaofeng Qin2,Jin Huang3
),Gaofeng Qin2,Jin Huang3
Received:2022-04-19
Revised:2022-06-12
Online:2023-12-25
Published:2023-12-21
Contact:
Enlin Zhou
E-mail:tenrey18@163.com
Zhicheng He,Leihao Du,Enlin Zhou,Gaofeng Qin,Jin Huang. CAN Bus Load Rate Optimization Based on Improved Continuous Hopfield Neural Network[J].Automotive Engineering, 2023, 45(12): 2338-2347.
"
"
"
| 信号 | 报文1 | 报文2 | 报文3 |
|---|---|---|---|
| 信号1 | 1 | 0 | 0 |
| 信号2 | 0 | 1 | 0 |
| 信号3 | 1 | 0 | 0 |
| 信号4 | 0 | 0 | 1 |
| 信号5 | 0 | 0 | 1 |
| 信号6 | 0 | 0 | 1 |
"
"
| 信号标识 | 长度/bit | 周期/ms | 信号标识 | 长度/bit | 周期/ms | 信号标识 | 长度/bit | 周期/ms | 信号标识 | 长度/bit | 周期/ms |
|---|---|---|---|---|---|---|---|---|---|---|---|
| S1 | 8 | 10 | S26 | 1 | 200 | S51 | 8 | 10 | S76 | 1 | 200 |
| S2 | 8 | 10 | S27 | 2 | 200 | S52 | 8 | 10 | S77 | 2 | 200 |
| S3 | 1 | 200 | S28 | 1 | 400 | S53 | 1 | 200 | S78 | 1 | 400 |
| S4 | 1 | 10 | S29 | 2 | 400 | S54 | 1 | 10 | S79 | 2 | 400 |
| S5 | 2 | 100 | S30 | 1 | 300 | S55 | 2 | 100 | S80 | 1 | 300 |
| S6 | 1 | 100 | S31 | 16 | 100 | S56 | 1 | 100 | S81 | 16 | 100 |
| S7 | 1 | 100 | S32 | 8 | 200 | S57 | 1 | 100 | S82 | 8 | 200 |
| S8 | 1 | 100 | S33 | 2 | 300 | S58 | 1 | 100 | S83 | 2 | 300 |
| S9 | 8 | 100 | S34 | 2 | 100 | S59 | 8 | 100 | S84 | 2 | 100 |
| S10 | 1 | 10 | S35 | 10 | 300 | S60 | 1 | 10 | S85 | 10 | 300 |
| S11 | 1 | 10 | S36 | 1 | 100 | S61 | 1 | 10 | S86 | 1 | 100 |
| S12 | 2 | 10 | S37 | 1 | 100 | S62 | 2 | 10 | S87 | 1 | 100 |
| S13 | 2 | 10 | S38 | 1 | 100 | S63 | 2 | 10 | S88 | 1 | 100 |
| S14 | 2 | 100 | S39 | 10 | 100 | S64 | 2 | 100 | S89 | 10 | 100 |
| S15 | 16 | 10 | S40 | 10 | 400 | S65 | 16 | 10 | S90 | 10 | 400 |
| S16 | 16 | 10 | S41 | 8 | 400 | S66 | 16 | 10 | S91 | 8 | 400 |
| S17 | 1 | 100 | S42 | 1 | 100 | S67 | 1 | 100 | S92 | 1 | 100 |
| S18 | 1 | 100 | S43 | 1 | 400 | S68 | 1 | 100 | S93 | 1 | 400 |
| S19 | 8 | 200 | S44 | 1 | 100 | S69 | 8 | 200 | S94 | 1 | 100 |
| S20 | 8 | 200 | S45 | 1 | 100 | S70 | 8 | 200 | S95 | 1 | 100 |
| S21 | 1 | 100 | S46 | 8 | 200 | S71 | 1 | 100 | S96 | 8 | 200 |
| S22 | 3 | 100 | S47 | 8 | 300 | S72 | 3 | 100 | S97 | 8 | 300 |
| S23 | 1 | 100 | S48 | 2 | 300 | S73 | 1 | 100 | S98 | 2 | 300 |
| S24 | 1 | 100 | S49 | 2 | 300 | S74 | 1 | 100 | S99 | 2 | 300 |
| S25 | 1 | 100 | S50 | 4 | 200 | S75 | 1 | 100 |
"
"

"
"
| 算法 | 数据 | CAN总线负载率(Busload) | 均值 | 总计 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
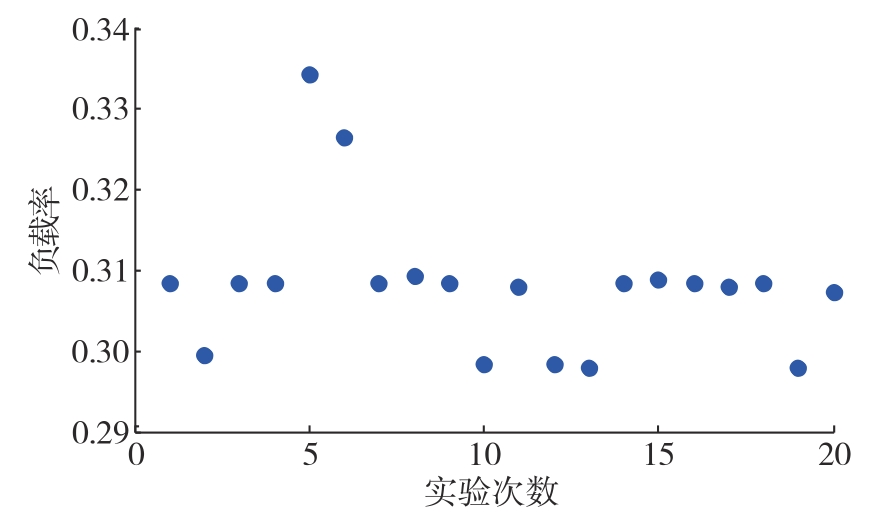
| CHNN | A | 0.308 4 | 0.299 4 | 0.308 4 | 0.308 4 | 0.334 4 | 0.326 4 | 0.308 4 | 0.309 4 | 0.308 4 | 0.298 4 | 0.308 1 | 0.546 7 |
| 0.307 9 | 0.298 4 | 0.297 9 | 0.308 4 | 0.308 9 | 0.308 4 | 0.307 9 | 0.308 4 | 0.297 9 | 0.307 4 | ||||
| 0.025 7 | 0.025 4 | 0.025 9 | 0.025 7 | 0.025 4 | 0.025 4 | 0.025 7 | 0.025 7 | 0.025 2 | 0.025 4 | ||||
| B | 0.229 3 | 0.239 3 | 0.239 3 | 0.239 3 | 0.239 3 | 0.229 3 | 0.239 3 | 0.239 3 | 0.239 3 | 0.247 3 | 0.238 6 | ||
| 0.239 3 | 0.239 3 | 0.239 3 | 0.239 3 | 0.247 3 | 0.229 3 | 0.239 3 | 0.239 3 | 0.239 3 | 0.239 3 | ||||
| SA-CHNN | A | 0.298 4 | 0.298 4 | 0.298 4 | 0.297 9 | 0.298 4 | 0.297 9 | 0.297 9 | 0.298 4 | 0.297 9 | 0.298 4 | 0.298 2 | 0.528 0 |
| 0.298 4 | 0.298 4 | 0.297 9 | 0.298 4 | 0.298 4 | 0.297 9 | 0.298 4 | 0.297 9 | 0.297 9 | 0.298 4 | ||||
| 0.025 4 | 0.025 2 | 0.025 2 | 0.025 2 | 0.025 4 | 0.024 9 | 0.025 2 | 0.024 9 | 0.025 2 | 0.025 2 | ||||
| B | 0.229 3 | 0.229 3 | 0.229 3 | 0.229 3 | 0.229 3 | 0.229 3 | 0.229 3 | 0.229 3 | 0.229 3 | 0.229 3 | 0.229 8 | ||
| 0.229 3 | 0.229 3 | 0.229 3 | 0.229 3 | 0.229 3 | 0.229 3 | 0.229 3 | 0.229 3 | 0.239 3 | 0.229 3 | ||||

"


"

"
"

"

"
| 1 | SPECIFICATION C A N. Bosch[J]. Robert Bosch GmbH, Postfach, 1991, 50. |
| 2 | DI NATALE M, ZENG H, GIUSTO P, et al. Understanding and using the controller area network communication protocol: theory and practice[M]. Springer Science & Business Media, 2012. |
| 3 | SHUAI Z, ZHANG H, WANG J, et al. Combined AFS and DYC control of four-wheel-independent-drive electric vehicles over CAN network with time-varying delays[J]. IEEE Transactions on Vehicular Technology, 2013, 63(2): 591-602. |
| 4 | TAUBE J, HARTWICH F, BEIKIRCH H. Comparison of CAN gateway modules for automotive and industrial control applications[C].Proceedings of the 10th international CAN Conference (iCC2005), 2005. |
| 5 | SOMMER J, BLIND R. Optimized resource dimensioning in an embedded CAN-CAN gateway[C]. 2007 International Symposium on Industrial Embedded Systems. IEEE, 2007: 55-62. |
| 6 | SOJKA M, PÍŠA P, ŠPINKA O, et al. Measurement automation and result processing in timing analysis of a Linux-based CAN-to-CAN gateway[C]. Proceedings of the 6th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems. IEEE, 2011, 2: 963-968. |
| 7 | AZKETA E, GUTIÉRREZ J J, PALENCIA J C, et al. Schedulability analysis of multi-packet messages in segmented CAN[C].Proceedings of 2012 IEEE 17th International Conference on Emerging Technologies & Factory Automation (ETFA 2012). IEEE, 2012: 1-8. |
| 8 | LIU J, ZHANG S, SUN W, et al. In-vehicle network attacks and countermeasures: challenges and future directions[J]. IEEE Network, 2017, 31(5): 50-58. |
| 9 | 刘洪鹏, 唐国强. CAN 总线负载率算法及优化设计[J]. 客车技术与研究, 2019, 5. |
| LIU H P, TANG G Q. Algorithm and optimization design of CAN bus load rate[J]. Bus & Coach Technology and Research, 2019, 5. | |
| 10 | COOK J A, FREUDENBERG J S. Controller area network (CAN)[J]. EECS, 2007, 461: 1-5. |
| 11 | NOLTE T, HANSSON H, NORSTROM C. Minimizing CAN response-time jitter by message manipulation[C].Proceedings. Eighth IEEE Real-Time and Embedded Technology and Applications Symposium. IEEE, 2002: 197-206. |
| 12 | NAN J R, CUI S C, CHAI Z. Research on CAN bus of pure electric vehicles based on SAEJ1939[C]. Advanced Materials Research. Trans Tech Publications Ltd, 2012, 512: 2650-2656. |
| 13 | POLZLBAUER F, BATE I, BRENNER E. Optimized frame packing for embedded systems[J]. IEEE Embedded Systems Letters, 2012, 4(3): 65-68. |
| 14 | 赵公旗,冯宝存,赵红玉,等.浅谈车载总线负载对网络传输影响及优化[J].汽车电器,2015(12):22-24. |
| ZHAO G Q, FENG B C, ZHAO H Y, et al. Influence of vehicle busload on network transmission and its optimization[J]. Automotive Appliances, 2015(12):22-24. | |
| 15 | 巢宽宏. 基于神经网络的CAN总线负载率优化的研究[D].长沙: 湖南大学,2020. |
| CHAO K H. Research on the load rate optimization of CAN bus based on neural network[D]. Changsha: Hunan University, 2020. | |
| 16 | 刘青.汽车 CAN 总线实时性优化研究[D].长春: 吉林大学, 2013. |
| LIU Q. Optimization research on real time performance of CAN bus in automobile[D].Changchun: Jilin University, 2013. |
| [1] | Yanxin Wang,Haiyan Li,Shihai Cui,Lijuan He,Lü Wenle. Research on Prediction Model and Assessment Parameters of Head Injury for Child Occupants Based on BP Neural Network [J]. Automotive Engineering, 2024, 46(2): 329-336. |
| [2] | Minghui Hu,Guangyao Zhu,Changhe Liu,Guofeng Tang. Joint Estimation of State of Charge for Lithium-Ion Battery with Kalman Filtering and Gated Recurrent Unit Neural Networks Considering Hysteresis Characteristics [J]. Automotive Engineering, 2023, 45(9): 1688-1701. |
| [3] | Xin Guan,Zhaohui Zhong,Jun Zhan,Tenglong Xi,Hao Ye,Shenzhen Gao,Jian Cheng,Shihui Liao,Jun Cai. Vehicle Handling and Stability Test Type Recognition Method Based on Convolutional Neural Network [J]. Automotive Engineering, 2023, 45(9): 1765-1771. |
| [4] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [5] | Guoqiang Chen,Zhengyi Shen,Li Sun,Mengfan Zhi,Tong Li. Intelligent Cockpit Perceptual Image Prediction Based on BP Neural Network Optimization Genetic Algorithm [J]. Automotive Engineering, 2023, 45(8): 1479-1488. |
| [6] | Lei Zhang, Keren Guan, Xiaolin Ding, Pengyu Guo, Zhenpo Wang, Fengchun Sun. Tire-Road Friction Estimation Method Based on Image Recognition and Dynamics Fusion [J]. Automotive Engineering, 2023, 45(7): 1222-1234. |
| [7] | Xia Zhao,Zhao Li,Rui Fu,Zhenzhen Ge,Chang Wang. Real-Time Detection of Distracted Driving Behavior Based on Deep Convolution-Tokens Dimensionality Reduction Optimized Visual Transformer Model [J]. Automotive Engineering, 2023, 45(6): 974-988. |
| [8] | Wang Liang,Zhaobo Qin,Liang Chen,Yougang Bian,Manjiang Hu. Longitudinal Control Method of Intelligent Vehicles Based on the Improved BP Neural Network [J]. Automotive Engineering, 2022, 44(8): 1162-1172. |
| [9] | Zheyu Zhang,Lü Chao,Jinghang Li,Guangming Xiong,Shaobin Wu,Jianwei Gong. Pedestrian Trajectory Prediction and Risk Grade Assessment Based on Vehicle-Perspective Pedestrian Data [J]. Automotive Engineering, 2022, 44(5): 675-683. |
| [10] | Qin Shi,Xin Liu,Helie Ying,Mingwei Wang,Zejia He,Lin He. Study on the Backstepping Control Algorithm for the Hydraulic Pressure in Electro-hydraulic Brake-by-wire System [J]. Automotive Engineering, 2022, 44(5): 747-755. |
| [11] | Yong Chen,Changyin Wei,Xiaoyu Li,Yanlin Li,Caixia Liu,Xiaozhe Lin. Research on Fuzzy Energy Management Strategy for Extended-Range Electric Vehicles with Driving Condition Identification [J]. Automotive Engineering, 2022, 44(4): 514-524. |
| [12] | Desheng Xie,Youchun Xu,Feng Lu,Shiju Pan. Real-time Detection of 3D Objects Based on Multi-Sensor Information Fusion [J]. Automotive Engineering, 2022, 44(3): 340-349. |
| [13] | Runze Feng,Kun Jiang,Weiguang Yu,Diange Yang. Chinese Traffic Sign Recognition Based on Two-stage Classification Algorithm [J]. Automotive Engineering, 2022, 44(3): 434-441. |
| [14] | Yunfei Zha,Lü Xiaolong,Xinye Liu,Fangwu Ma. Fusion Estimation of Vehicle State Parameters Based on Dichotomy [J]. Automotive Engineering, 2022, 44(12): 1910-1918. |
| [15] | Zhenhai Gao,Wenhao Wen,Minghong Tang,Jian Zhang,Guoying Chen. Estimation of Vehicle Motion State Based on Hybrid Neural Network [J]. Automotive Engineering, 2022, 44(10): 1527-1536. |
|