Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (8): 1162-1172.doi: 10.19562/j.chinasae.qcgc.2022.08.006
Special Issue: 智能网联汽车技术专题-规划&控制2022年
Previous Articles Next Articles
Wang Liang,Zhaobo Qin( ),Liang Chen,Yougang Bian,Manjiang Hu
),Liang Chen,Yougang Bian,Manjiang Hu
Received:2021-12-07
Revised:2022-03-20
Online:2022-08-25
Published:2022-08-25
Contact:
Zhaobo Qin
E-mail:qzb@hnu.edu.cn
Wang Liang,Zhaobo Qin,Liang Chen,Yougang Bian,Manjiang Hu. Longitudinal Control Method of Intelligent Vehicles Based on the Improved BP Neural Network[J].Automotive Engineering, 2022, 44(8): 1162-1172.

"
"
"
"
"
| 参数 | 数值 |
|---|---|
| 采样周期 | 0.02 |
| 预瞄时间常数(PI) | 0.2 |
| 预瞄时间常数(BP) | 0.2 |
| 最小预瞄距离 | 0.5 |
| 模式切换死区偏置量 | 0.3 |
| 线性整流激活函数斜率 | 1/5.5 |
| 驱动BP输出增益 | [20,1] |
| 制动BP输出增益 | [13,1] |
| 驱动/制动BP网络学习速率 | 0.002、0.002 |
| 驱动/制动BP网络动量因子 | 0.001、0.001 |
| 批处理归一化所用数据量 | 10、10 |
"


"

"
| 参数 | 数值 |
|---|---|
| 采样周期 | 0.02 |
| 预瞄时间常数(PI) | 1.0 |
| 预瞄时间常数(BP) | 0.2 |
| 最小预瞄距离 | 2.5 |
| 模式切换死区偏置量 | 0.5 |
| 线性整流激活函数斜率 | 1/5.5 |
| 驱动BP输出增益 | [20,3] |
| 制动BP输出增益 | [13,3] |
| 驱动/制动BP网络学习速率 | 0.002、0.002 |
| 驱动/制动BP网络动量因子 | 0.001、0.001 |
| 批处理归一化所用数据量 | 10、10 |
"
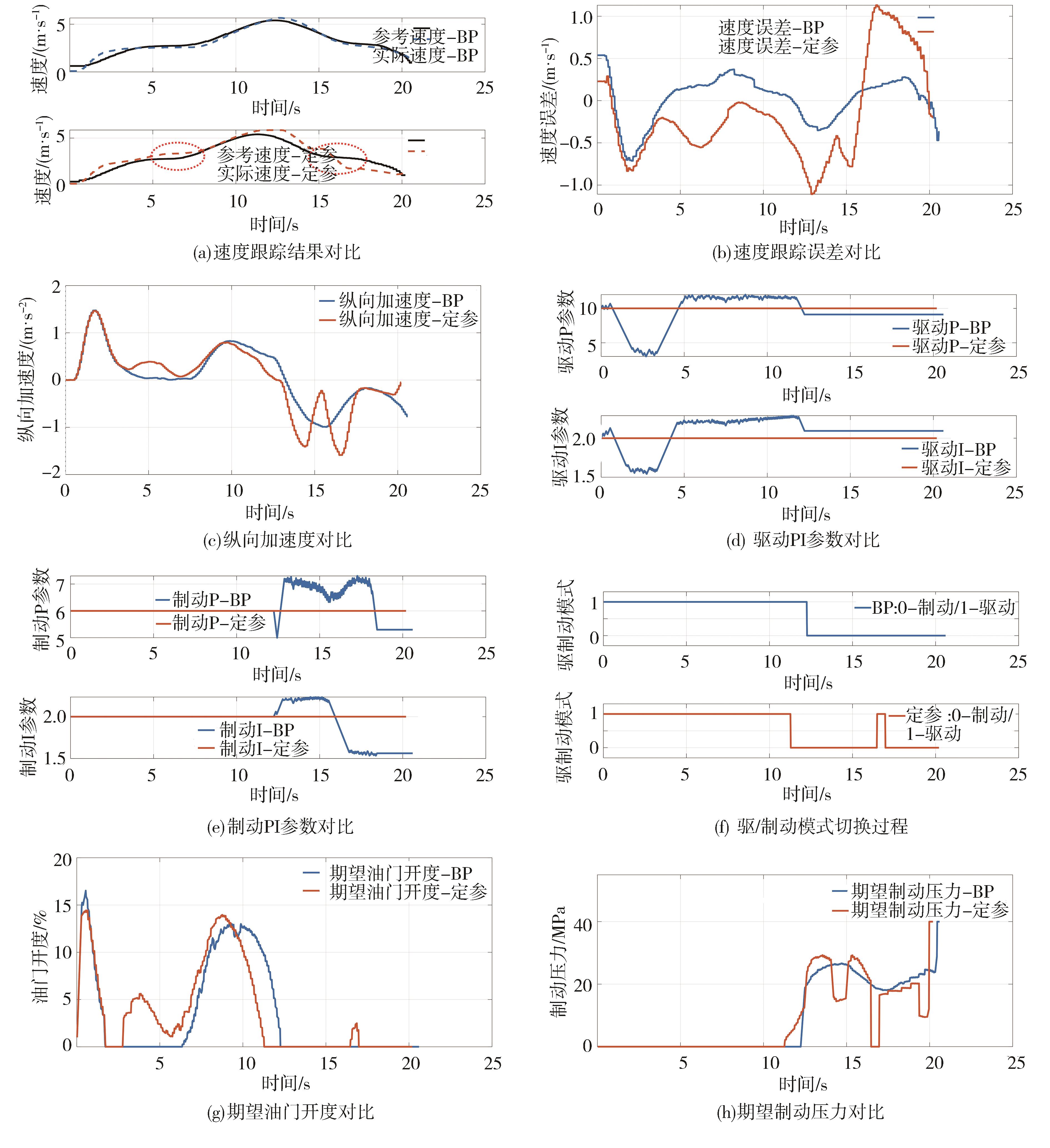
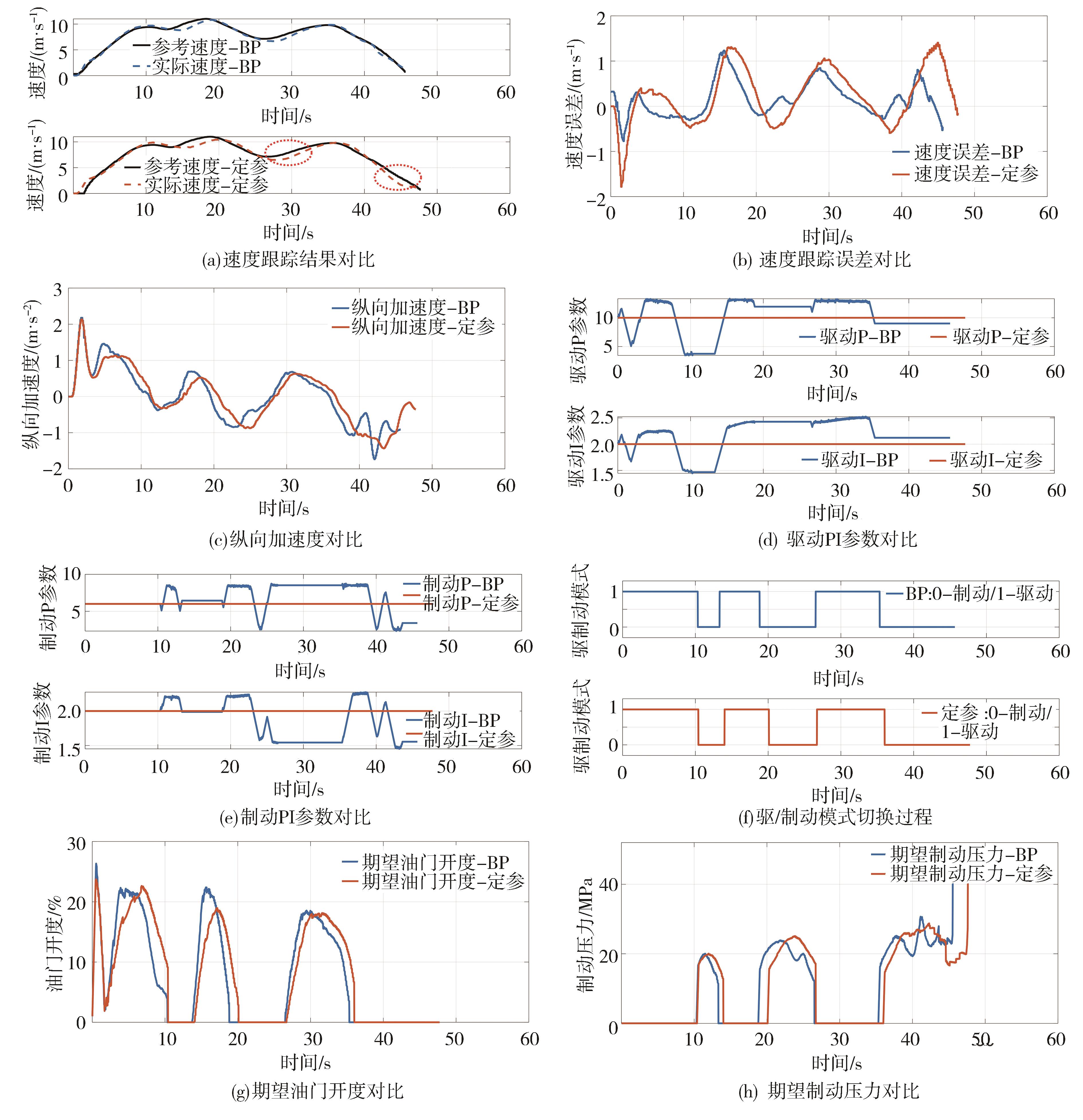
测试 工况 | 控制器 类型 | 最大误差/(m·s-1) | 均方误差/ (m·s-1)2 |
|---|---|---|---|
| A | 改进BP-PI | 0.713 | 0.059 |
| 常规PI | 1.131 | 0.355 | |
| B | 改进BP-PI | 1.233 | 0.167 |
| 常规PI | 1.406 | 0.384 |

"

"
| 1 | PADEN B, CAP M, YONG S Z, et al. A survey of motion planning and control techniques for self-driving urban vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 33-55. |
| 2 | 郭景华, 李克强, 罗禹贡. 智能车辆运动控制研究综述[J]. 汽车安全与节能学报, 2016, 7(2): 151-159. |
| GUO J H, LI K Q, LUO Y G. Review on the research of motion control for intelligent vehicle[J]. Journal of Automotive Safety and Energy Saving, 2016, 7(2): 151-159. | |
| 3 | 田涛涛, 侯忠生, 刘世达, 等. 基于无模型自适应控制的无人驾驶汽车横向控制方法[J].自动化学报, 2017, 43(11): 1931-1940. |
| TIAN T T, HOU Z S, LIU S D, et al. Lateral control method for autonomous vehicle based on model-free adaptive control [J]. Acta Automatica Sinica, 2017, 43(11): 1931-1940. | |
| 4 | KIM H, KIM D, SHU I, et al. Time-varying parameter adaptive vehicle speed control[J]. IEEE Transactions on Vehicular Technology, 2015, 65(2): 581-588. |
| 5 | ZHU M, CHEB H, XIONG G. A model predictive speed tracking control approach for autonomous ground vehicles[J]. Mechanical Systems and Signal Processing, 2017, 87: 138-152. |
| 6 | 宾洋, 李克强, 冯能莲. 车辆全速巡航系统的干扰解耦鲁棒控制[J].中国科学(E辑:技术科学), 2009, 39(12): 1963-1982. |
| BIN Y, LI K Q, FENG N L. Disturbance decoupling robust control for vehicle full speed cruise system[J]. Science in China (Series E: Technical Science), 2009, 39(12): 1963-1982. | |
| 7 | 雷敏. 基于动力学模型的智能车辆横、纵向及综合控制策略研究[D]. 重庆:重庆交通大学, 2017. |
| LEI M. Research on horizontal, longitudinal and integrated control strategy of intelligent vehicle based on dynamics model [D]. Chongqing: Chongqing Jiaotong University, 2017. | |
| 8 | XU S, PENG H, SONG Z, et al. Design and test of speed tracking control for the self-driving lincoln MKZ platform[J]. IEEE Transactions on Intelligent Vehicles, 2019, 5(2): 324-334. |
| 9 | PONCE A N, BEHAR A A, HERNANDEZ A O, et al. Neural networks for self-tuning control systems[J]. Acta Polytechnica, 2004, 44(1). |
| 10 | HUANG G, YUAN X, SHI K, et al. A BP-PID controller-based multi-model control system for lateral stability of distributed drive electric vehicle[J]. Journal of the Franklin Institute, 2019, 356(13): 7290-7311. |
| 11 | HERNANDEZ-ALVARADO R, GARCIA-VALDOVINOS L G, SALGADO-JIMENEZ T, et al. Neural network-based self-tuning PID control for underwater vehicles[J]. Sensors, 2016, 16(9): 1429. |
| 12 | SUN X, CAI Y, WANG S, et al. Optimal control of intelligent vehicle longitudinal dynamics via hybrid model predictive control[J]. Robotics and Autonomous Systems, 2019, 112: 190-200. |
| 13 | 裴晓欢. 基于 BP 神经网络的智能定位器 PI 参数整定[D]. 杭州:浙江工业大学, 2017. |
| PEI X H. PI parameter setting of intelligent locator based on BP neural network [D]. Hangzhou:Zhejiang University of Technology, 2017. | |
| 14 | LI X, QI B, LU W. A new improved BP neural network algorithm[C]. 2009 Second International Conference on Intelligent Computation Technology and Automation. IEEE, 2009, 1: 19-22. |
| 15 | HE K, ZHANG X, REN S, et al. Delving deep into rectifiers: surpassing human-level performance on imagenet classification[C]. Proceedings of the IEEE International Conference on Computer Vision. 2015: 1026-1034. |
| 16 | NA W, LIU K, ZHANG W, et al. Deep neural network with batch normalization for automated modeling of microwave components[C]. 2020 IEEE MTT-S International Conference on Numerical Electromagnetic and Multiphysics Modeling and Optimization (NEMO). IEEE, 2020: 1-3. |
| 17 | XU S, PENG H, SONG Z, et al. Accurate and smooth speed control for an autonomous vehicle[C]. 2018 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2018: 1976-1982. |
| 18 | 张飞铁, 奉山森, 黄晶. 无人驾驶汽车路径跟踪控制研究[J].计算机仿真, 2019, 36(6): 175-178,407. |
| ZHANG F T, FENG S S, HUANG J. Research on path tracking control of autonomous vehicle[J]. Computer Simulation, 2019, 36(6): 175-178,407. | |
| 19 | JIANG G, LUO M, BAI K, et al. A precise positioning method for a puncture robot based on a PSO-optimized BP neural network algorithm[J]. Applied Sciences, 2017, 7(10): 969. |
| [1] | Yanxin Wang,Haiyan Li,Shihai Cui,Lijuan He,Lü Wenle. Research on Prediction Model and Assessment Parameters of Head Injury for Child Occupants Based on BP Neural Network [J]. Automotive Engineering, 2024, 46(2): 329-336. |
| [2] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [3] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [4] | Xinjie Yuan,Fang Liu,Zhongjun Hou. Self-adaptive Porous Structure Detection of the Catalyst Layer in PEMFCs Based on GA-PSO-Otsu Algorithm [J]. Automotive Engineering, 2023, 45(9): 1702-1709. |
| [5] | Lin Hu,Gen Li,Fang Wang,Miao Lin,Ning Wu. Research on Test Scenarios of Passenger Cars and Two-Wheelers at Intersections Based on CIDAS Accident Data [J]. Automotive Engineering, 2023, 45(8): 1417-1427. |
| [6] | Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention [J]. Automotive Engineering, 2023, 45(8): 1448-1456. |
| [7] | Guoqiang Chen,Zhengyi Shen,Li Sun,Mengfan Zhi,Tong Li. Intelligent Cockpit Perceptual Image Prediction Based on BP Neural Network Optimization Genetic Algorithm [J]. Automotive Engineering, 2023, 45(8): 1479-1488. |
| [8] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |
| [9] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [10] | Zixian Li,Shiju Pan,Yuan Zhu,Binbing He,Youchun Xu. Semi-active Suspension Control for Intelligent Vehicles Based on State Feedback and Preview Feedforward [J]. Automotive Engineering, 2023, 45(5): 735-745. |
| [11] | Xiang Gao,Long Chen,Xinye Wang,Xiaoxia Xiong,Yicheng Li,Yuexia Chen. Intelligent Vehicle Driving Risk Assessment Method Based on Trajectory Prediction [J]. Automotive Engineering, 2023, 45(4): 588-597. |
| [12] | Jie Hu,Qi Zhu,Ruipeng Chen,Minchao Zhang,Zhihao Zhang,Haoyan Liu. Global Path Planning of Intelligent Vehicle with Must-Pass Nodes [J]. Automotive Engineering, 2023, 45(3): 350-360. |
| [13] | Lü Yanzhi,Chao Wei,Yuanhao He. An End-to-End Lane Change Method for Autonomous Driving Based on GCN and CIL [J]. Automotive Engineering, 2023, 45(12): 2310-2317. |
| [14] | Shiju Pan,Yongle Li,Zixian Li,Binbing He,Yuan Zhu,Youchun Xu. Path Following Method of Intelligent Vehicles Based on Improved Pure Tracking [J]. Automotive Engineering, 2023, 45(1): 1-8. |
| [15] | Shulian Zhao,Fei Lai,Keqiang Li,Tao Chen,Zhangjie Meng,Yichao Tang,Siyu Wu,Haodong Tian. Research on Intelligent Vehicle Test Method Based on Digital Twin Technology [J]. Automotive Engineering, 2023, 45(1): 42-51. |