Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (8): 1173-1182.doi: 10.19562/j.chinasae.qcgc.2022.08.007
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2022年
Previous Articles Next Articles
Runhui Huang,Likun Hu( ),Mingfang Su,Daye Xu,Aoran Chen
),Mingfang Su,Daye Xu,Aoran Chen
Received:2022-03-07
Revised:2022-04-06
Online:2022-08-25
Published:2022-08-25
Contact:
Likun Hu
E-mail:hlk3email@163.com
Runhui Huang,Likun Hu,Mingfang Su,Daye Xu,Aoran Chen. Semantic Segmentation Method of LiDAR Point Cloud Based on 3D Conical Grid[J].Automotive Engineering, 2022, 44(8): 1173-1182.

"
"

"

"


"
"
| 算法 | mIoU/ % | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Darknet53[ | 49.9 | 86.4 | 24.5 | 32.7 | 25.5 | 22.6 | 36.2 | 33.6 | 4.7 | 91.8 | 64.8 | 74.6 | 27.9 | 84.1 | 55.0 | 78.3 | 50.1 | 64.0 | 38.9 | 52.2 |
| RandLA-Net[ | 50.3 | 94.0 | 19.8 | 21.4 | 42.7 | 38.7 | 47.5 | 48.8 | 4.6 | 90.4 | 56.9 | 67.9 | 15.5 | 81.1 | 49.7 | 78.3 | 60.3 | 59.0 | 44.2 | 38.1 |
| RangeNet++[ | 52.2 | 91.4 | 25.7 | 34.4 | 25.7 | 23.0 | 38.3 | 38.8 | 4.8 | 91.8 | 65.0 | 75.2 | 27.8 | 87.4 | 58.6 | 80.5 | 55.1 | 64.6 | 47.9 | 55.9 |
| PolarNet[ | 54.3 | 93.8 | 40.3 | 30.1 | 22.9 | 28.5 | 43.2 | 40.2 | 5.6 | 90.8 | 61.7 | 74.4 | 21.7 | 90.0 | 61.3 | 84.0 | 65.5 | 67.8 | 51.8 | 57.5 |
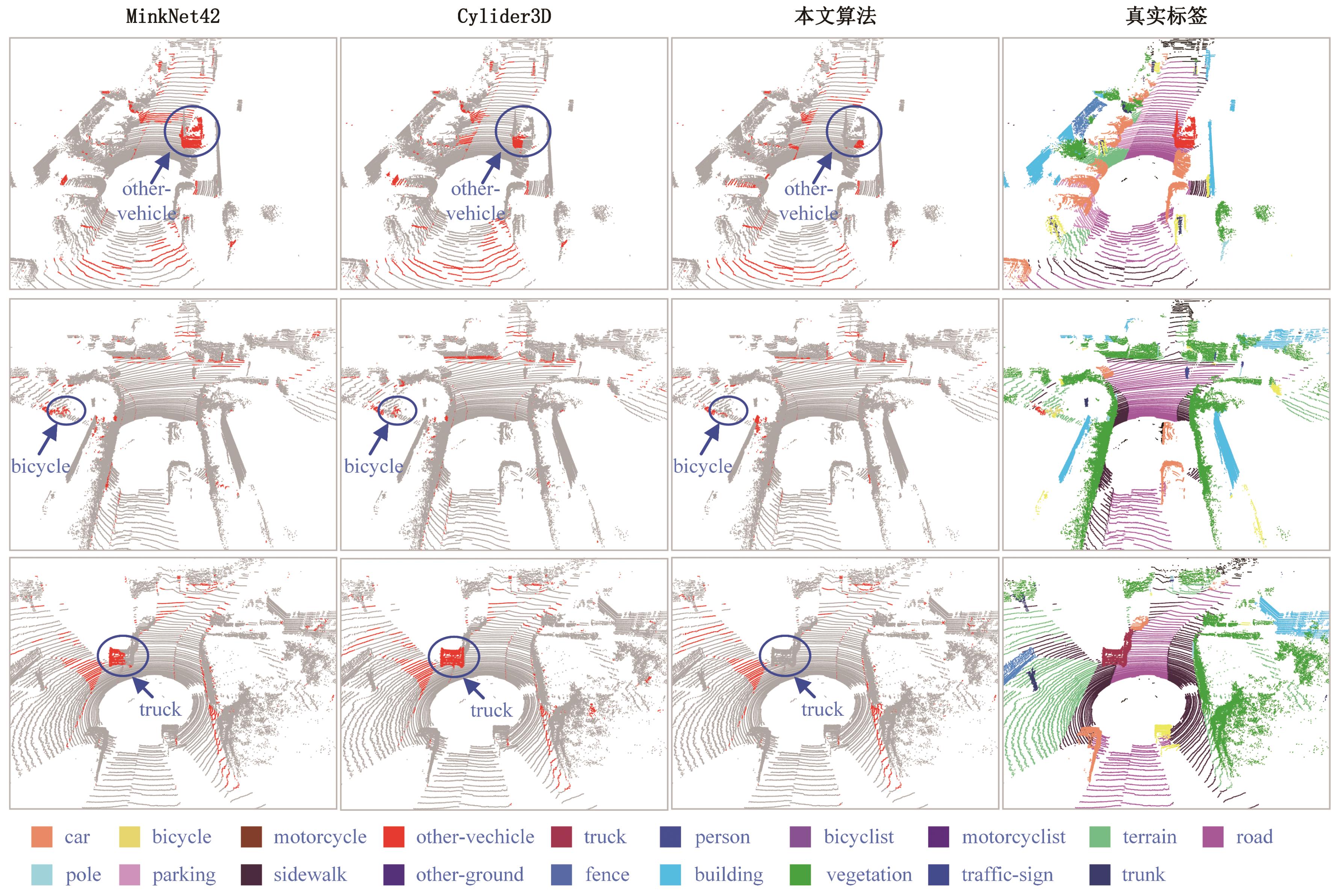
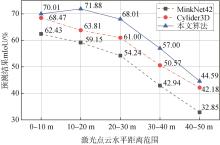
| MinkNet42[ | 54.3 | 94.3 | 23.1 | 26.2 | 26.1 | 26.7 | 43.1 | 36.4 | 7.9 | 91.1 | 63.8 | 69.7 | 29.3 | 92.7 | 57.1 | 83.7 | 68.4 | 64.7 | 57.3 | 60.1 |
| KPConv[ | 58.8 | 92.5 | 38.7 | 36.5 | 29.6 | 33.0 | 45.6 | 46.2 | 20.1 | 91.7 | 63.4 | 74.8 | 26.4 | 89.0 | 59.4 | 82.0 | 58.7 | 65.4 | 49.6 | 58.9 |
| Salsanex[ | 59.5 | 91.9 | 48.3 | 38.6 | 38.9 | 31.9 | 60.2 | 59.0 | 19.4 | 91.7 | 63.7 | 75.8 | 29.1 | 90.2 | 64.2 | 81.8 | 63.6 | 66.5 | 54.3 | 62.1 |
| FusionNet[ | 61.3 | 95.3 | 47.5 | 37.7 | 41.8 | 34.5 | 59.5 | 56.8 | 11.9 | 91.8 | 68.8 | 77.1 | 30.8 | 92.5 | 69.4 | 84.5 | 69.8 | 68.5 | 60.4 | 66.5 |
| Cylinder3D[ | 67.8 | 97.1 | 67.6 | 64.0 | 59.0 | 58.6 | 73.9 | 67.9 | 36.0 | 91.4 | 65.1 | 75.5 | 32.3 | 91.0 | 66.5 | 85.4 | 71.8 | 68.5 | 62.6 | 65.6 |
| (AF)2-S3Net[ | 69.7 | 94.5 | 65.4 | 86.8 | 39.2 | 41.1 | 80.7 | 80.4 | 74.3 | 91.3 | 68.8 | 72.5 | 53.5 | 87.9 | 63.2 | 70.2 | 68.5 | 53.7 | 61.5 | 71.0 |
| 本文算法 | 71.0 | 97.3 | 73.5 | 72.1 | 49.3 | 58.5 | 79.8 | 82.8 | 23.6 | 92.9 | 73.0 | 79.7 | 27.1 | 91.8 | 68.5 | 86.9 | 75.8 | 72.0 | 70.0 | 75.1 |
"
"
| 算法 | 模型参数/106 | 内存消耗/Gb | 推理时间/ms | mIoU/ % |
|---|---|---|---|---|
| PolarNet | 13.0 | 7.7 | 160 | 58.2 |
| MinkNet42 | 21.7 | 4.2 | 114 | 61.1 |
| Cylinder3D | 53.3 | 3.4 | 295 | 66.9 |
| 本文算法(未转换) | 103.7 | 4.7 | 170 | 70.5 |
| 本文算法(转换) | 100.7 | 4.5 | 159 | 70.5 |
"

"
| 算法 | mIoU/% | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PolarNet[ | 69.4 | 72.2 | 16.8 | 77.0 | 86.5 | 51.1 | 69.7 | 64.8 | 54.1 | 69.7 | 63.5 | 96.6 | 67.1 | 77.7 | 72.1 | 87.1 | 84.5 |
| JS3C-Net[ | 73.6 | 80.1 | 26.2 | 87.8 | 84.5 | 55.2 | 72.6 | 71.3 | 66.3 | 76.8 | 71.2 | 96.8 | 64.5 | 76.9 | 74.1 | 87.5 | 86.1 |
| Cylinder3D[ | 77.2 | 82.8 | 29.8 | 84.3 | 89.4 | 63.0 | 79.3 | 77.2 | 73.4 | 84.6 | 69.1 | 97.7 | 70.2 | 80.3 | 75.5 | 90.4 | 87.6 |
| AMVNet[ | 77.4 | 80.6 | 32.0 | 81.7 | 88.9 | 67.1 | 84.3 | 76.1 | 73.5 | 84.9 | 67.3 | 97.5 | 67.4 | 79.4 | 75.5 | 91.5 | 88.7 |
| 本文算法 | 78.2 | 82.2 | 34.7 | 84.0 | 87.5 | 71.4 | 83.2 | 78.9 | 74.2 | 85.0 | 68.3 | 97.4 | 68.7 | 79.8 | 75.9 | 91.6 | 88.6 |
"
基准 模型 | 锥形 分区 | Rep- Spconv3d | Top-k 损失函数 | Geo-aware 损失函数 | mIoU/% |
|---|---|---|---|---|---|
| √ | 60.6 | ||||
| √ | √ | 63.0 | |||
| √ | √ | √ | 65.8 | ||
| √ | √ | √ | √ | 67.9 | |
| √ | √ | √ | √ | √ | 70.5 |
"
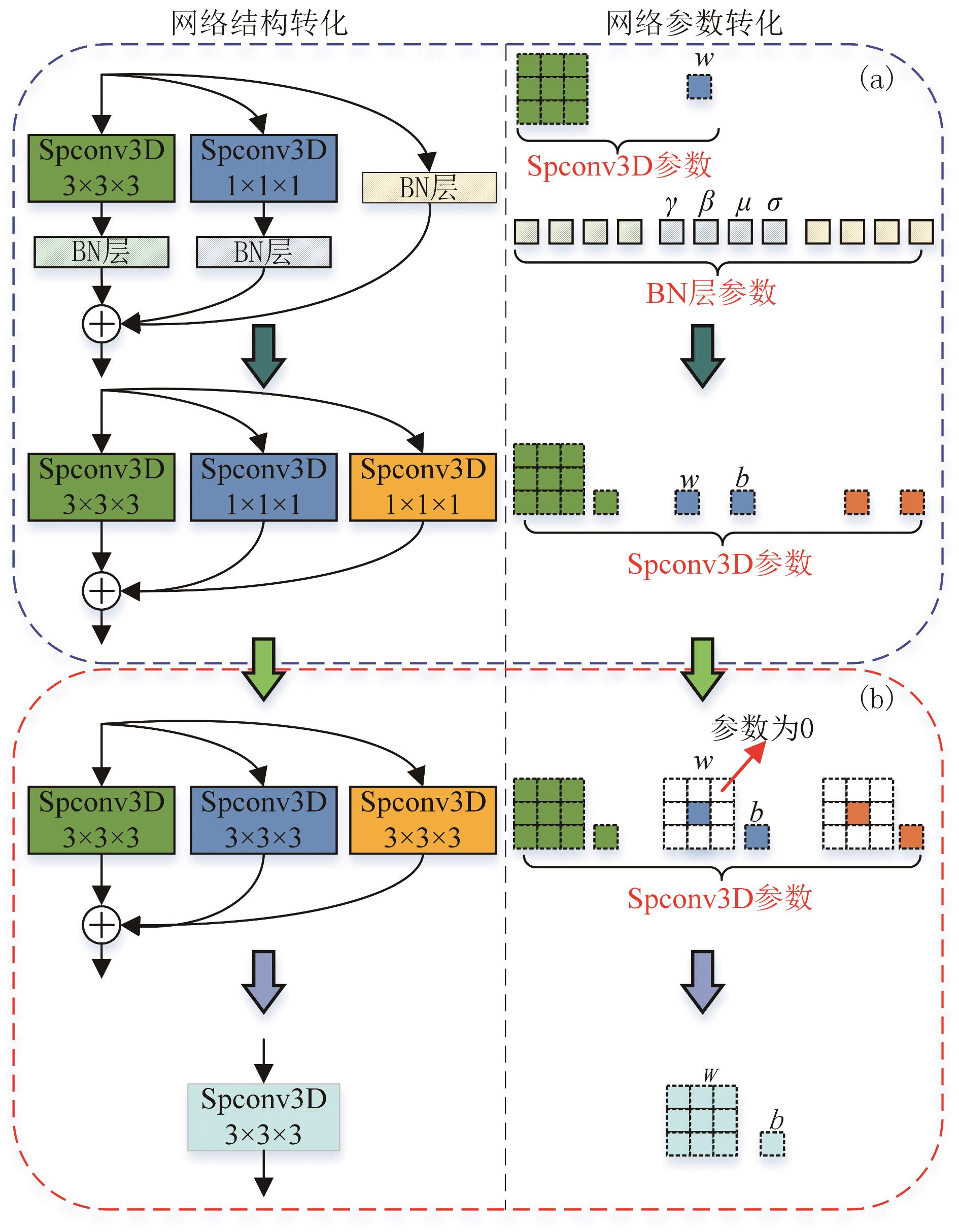
Spconv3D 3×3×3 | Spconv3D 1×1×1 | Identity层 | mIoU/% | 推理时间 (模型未转换)/ms |
|---|---|---|---|---|
| √ | 68.4 | 137 | ||
| √ | √ | 69.1 | 148 | |
| √ | √ | 68.5 | 146 | |
| √ | √ | √ | 70.5 | 149 |
| 1 | BEHLEY J, GARBADE M, MILIOTO A, et al. SemanticKITTI: a dataset for semantic scene understanding of LIDAR sequences[C]. 2019 IEEE/CVF International Conference on Computer Vision. IEEE, 2019: 9297-9307. |
| 2 | CAESAR H, BANKITI V, LANG A H, et al. nuScenes: a multimodal dataset for autonomous driving[C]. 2020 IEEE/CVF International Conference on Computer Vision. IEEE, 2020: 11621-11631. |
| 3 | HACKEL T, SAVINOV N, LADICKY L, et al. Semantic3d. net: a new large-scale point cloud classification benchmark[J]. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2017, IV-1/W1: 91–98. |
| 4 | WU B, WAN A, YUE X, et al. SqueezeSeg: convolutional neural nets with recurrent CRF for real-time road-object segmentation from 3D LIDAR point cloud[C]. 2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2018: 1887-1893. |
| 5 | WU B, ZHOU X, ZHAO S, et al. SqueezeSegV2: improved model structure and unsupervised domain adaptation for road-object segmentation from a LIDAR point cloud[C]. 2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019: 4376-4382. |
| 6 | XU C, WU B, WANG Z, et al. SqueezeSegV3: spatially-adaptive convolution for efficient point-cloud segmentation[C]. European Conference on Computer Vision. Springer, Cham, 2020: 1-19. |
| 7 | MILIOTO A, VIZZO I, BEHLEY J, et al. RangeNet++: fast and accurate LIDAR semantic segmentation[C]. 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2019: 4213-4220. |
| 8 | REDMON J, FARHADI A. YOLOV3: an incremental improvement[J]. arXiv preprint arXiv:, 2018. |
| 9 | ZHANG Y, ZHOU Z, DAVID P, et al. PolarNet: an improved grid representation for online LIDAR point clouds semantic segmentation[C]. 2020 IEEE/CVF International Conference on Computer Vision. IEEE, 2020: 9601-9610. |
| 10 | MATURANA D, SCHERER S. Voxnet: A 3D convolutional neural network for real-time object recognition[C]. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2015: 922-928. |
| 11 | GRAHAM B, ENGELCKE M, VAN DER MAATEN L. 3D semantic segmentation with submanifold sparse convolutional networks[C]. 2018 IEEE/CVF International Conference on Computer Vision. IEEE, 2018: 9224-9232. |
| 12 | CHOY C, GWAK J Y, SAVARESE S. 4D spatio-temporal convnets: minkowski convolutional neural networks[C]. 2019 IEEE/CVF International Conference on Computer Vision. IEEE, 2019: 3075-3084. |
| 13 | ZHU X, ZHOU H, WANG T, et al. Cylindrical and asymmetrical 3D convolution networks for lidar segmentation[C]. 2021 IEEE/CVF International Conference on Computer Vision. IEEE, 2021: 9939-9948.. |
| 14 | CHENG R, RAZANI R, TAGHAVI E, et al. (AF)2-S3Net: attentive feature fusion with adaptive feature selection for sparse semantic segmentation network[C]. 2021 IEEE/CVF International Conference on Computer Vision. IEEE, 2021: 12547-12556. |
| 15 | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3d classification and segmentation[C]. 2017 IEEE/CVF International Conference on Computer Vision. IEEE, 2017: 652-660. |
| 16 | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[J]. 31st Internation‐al Conference on Neural Information Processing Systems. CurranAssociates Inc:, 2017:5099-5108. |
| 17 | THOMAS H, QI C R, DESCHAUD J E, et al. KPConv: flexible and deformable convolution for point clouds[C]. 2019 IEEE/CVF International Conference on Computer Vision. IEEE, 2019: 6411-6420. |
| 18 | HU Q, YANG B, XIE L, et al. Randla-net: efficient semantic segmentation of large-scale point clouds[C]. 2020 IEEE/CVF International Conference on Computer Vision. IEEE, 2020: 11108-11117. |
| 19 | LIU Y, FAN B, MENG G, et al. Densepoint: learning densely contextual representation for efficient point cloud processing[C]. 2019 IEEE/CVF International Conference on Computer Vision. IEEE, 2019: 5239-5248. |
| 20 | HUANG G, LIU Z, VAN DER MAATEN L, et al. Densely connected convolutional networks[C].2017 IEEE/CVF International Conference on Computer Vision. IEEE, 2017: 4700-4708. |
| 21 | DING X, ZHANG X, MA N, et al. Repvgg: making vgg-style convnets great again[C]. 2021 IEEE/CVF International Conference on Computer Vision. IEEE, 2021: 13733-13742. |
| 22 | LI J, LIU Y, YUAN X, et al. Depth based semantic scene completion with position importance aware loss[J]. IEEE Robotics and Automation Letters, 2019, 5(1): 219-226. |
| 23 | FAN Y, LYU S, YING Y, et al. Learning with average top-k loss[J]. Advances in Neural Information Processing Systems, 2017, 30. |
| 24 | BERMAN M, TRIKI A R, BLASCHKO M B. The lovász-softmax loss: a tractable surrogate for the optimization of the intersection-over-union measure in neural networks[C]. 2018 IEEE/CVF International Conference on Computer Vision. 2018: 4413-4421. |
| 25 | CORTINHAL T, TZELEPIS G, ERDAL AKSOY E. SalsaNext: fast, uncertainty-aware semantic segmentation of LiDAR point clouds[C]. International Symposium on Visual Computing. Springer, Cham, 2020: 207-222. |
| 26 | ZHANG F,FANG J,WAH B,et al. Deep fusionnet for pointcloud semantic segmentation[C]. Computer Vision-ECCV2020:16th European Conference,Glasgow,UK,August 23–28,2020,Proceedings,Part XXIV 16. Springer International Publishing,2020:644-663. |
| 27 | YAN X, GAO J, LI J, et al. Sparse single sweep LIDAR point cloud segmentation via learning contextual shape priors from scene completion[J]. arXiv preprint arXiv:, 2020. |
| 28 | LIONG V E, NGUYEN T N T, WIDJAJA S, et al. AMVNet: assertion-based multi-view fusion network for LIDAR semantic segmentation[J]. arXiv preprint arXiv:, 2020. |
| [1] | Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction [J]. Automotive Engineering, 2024, 46(2): 230-240. |
| [2] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [3] | Zuliang Jin,Hanbing Wei,Liu Zheng,Lu Lou,Guofeng Zheng. Lightweight Semantic Segmentation Method Based on Local Window Cross Attention [J]. Automotive Engineering, 2023, 45(9): 1617-1625. |
| [4] | Weiguo Liu,Zhiyu Xiang,Weiping Liu,Daoxin Qi,Zixu Wang. Research on Vehicle Control Algorithm Based on Distributed Reinforcement Learning [J]. Automotive Engineering, 2023, 45(9): 1637-1645. |
| [5] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [6] | Wenguang Wu,Shuangyue Tian,Zhiyong Zhang,Bin Zhang. Research on Semantic Segmentation of Uneven Features of Unpaved Road [J]. Automotive Engineering, 2023, 45(8): 1468-1478. |
| [7] | Dongyu Zhao, Shuen Zhao. Autonomous Driving 3D Object Detection Based on Cascade YOLOv7 [J]. Automotive Engineering, 2023, 45(7): 1112-1122. |
| [8] | Lei Zhang, Keren Guan, Xiaolin Ding, Pengyu Guo, Zhenpo Wang, Fengchun Sun. Tire-Road Friction Estimation Method Based on Image Recognition and Dynamics Fusion [J]. Automotive Engineering, 2023, 45(7): 1222-1234. |
| [9] | Jiahao Zhao,Zhiquan Qi,Zhifeng Qi,Hao Wang,Lei He. Calculation of Heading Angle of Parallel Large Vehicle Based on Tire Feature Points [J]. Automotive Engineering, 2023, 45(6): 1031-1039. |
| [10] | Lisheng Jin,Guangde Han,Xianyi Xie,Baicang Guo,Guofeng Liu,Wentao Zhu. Review of Autonomous Driving Decision-Making Research Based on Reinforcement Learning [J]. Automotive Engineering, 2023, 45(4): 527-540. |
| [11] | Qingyang Huang,Xiaoping Jin,Yikang Zhang. Analysis of Drivers' Driving Posture Change Rule Under the Condition of Automatic Driving Level Improvement [J]. Automotive Engineering, 2023, 45(3): 382-392. |
| [12] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [13] | Pulei Xu,Yingfeng Cai,Yubo Lian,Xiaoqiang Sun,Hai Wang,Long Chen,Yilin Zhong. AFS/DYC Coordinated Control of Intelligent Vehicles Based on Improved Hierarchical Extensibility Theory [J]. Automotive Engineering, 2023, 45(1): 20-31. |
| [14] | Zhenhai Gao,Xiangtong Yan,Fei Gao. A Decision-making Method for Longitudinal Autonomous Driving Based on Inverse Reinforcement Learning [J]. Automotive Engineering, 2022, 44(7): 969-975. |
| [15] | Dafang Wang,Jingdong Du,Jiang Cao,Mei Zhang,Gang Zhao. Research on Style Transfer Network for Autonomous Driving Data Generation [J]. Automotive Engineering, 2022, 44(5): 684-690. |