Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (10): 1853-1862.doi: 10.19562/j.chinasae.qcgc.2024.10.012
Previous Articles Next Articles
Junhui Zhang1,2,3,4( ),Xiaoman Guo2,4,Yuxi Liu2,4,Mingqiang Zheng2,4,Yuhan Qian2,4,Yuxuan Ding2,4
),Xiaoman Guo2,4,Yuxi Liu2,4,Mingqiang Zheng2,4,Yuhan Qian2,4,Yuxuan Ding2,4
Received:2024-05-05
Revised:2024-06-29
Online:2024-10-25
Published:2024-10-21
Contact:
Junhui Zhang
E-mail:zjh34@mail.ustc.edu.cn
Junhui Zhang,Xiaoman Guo,Yuxi Liu,Mingqiang Zheng,Yuhan Qian,Yuxuan Ding. Driver-Automation Shared Lane-Keeping Robust Control[J].Automotive Engineering, 2024, 46(10): 1853-1862.
"

"

"
"
| 参数 | Kp | KC | τlead | τlag | τp | KG | τk1 | τk2 | KD | τ1 | τN |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 数值 | 0.44 | 11.6 | 4.4 | 0.2 | 0.06 | 0.67 | 3.99 | 0.013 | 1.0 | 2.5 | 0.1 |

"
"
| 参数 | 数值 |
|---|---|
| 整车质量m /kg | 1 650 |
| 质心绕z轴的转动惯量Iz /(kg?m2) | 3 234 |
| 前轴与车辆质心之间的距离a /m | 1.4 |
| 后轴与车辆质心之间的距离b /m | 1.65 |
| 车身宽度/m | 1.88 |
| 前轮的侧偏刚度Cf /(kN?rad-1) | 92 |
| 后轮的侧偏刚度Cr /(kN?rad-1) | 92 |
| 轮胎接触地面宽度ηt /m | 0.13 |
| 等效阻尼系数Bs /(N?m?s?rad-1) | 0.57 |
| 等效转动惯量Js /(kg?m2) | 0.05 |
| 转向传动比is | 16 |
| 设计参数 | 0.85 |
| 设计参数 | 0.15 |
"


"
"

"
"

"
"
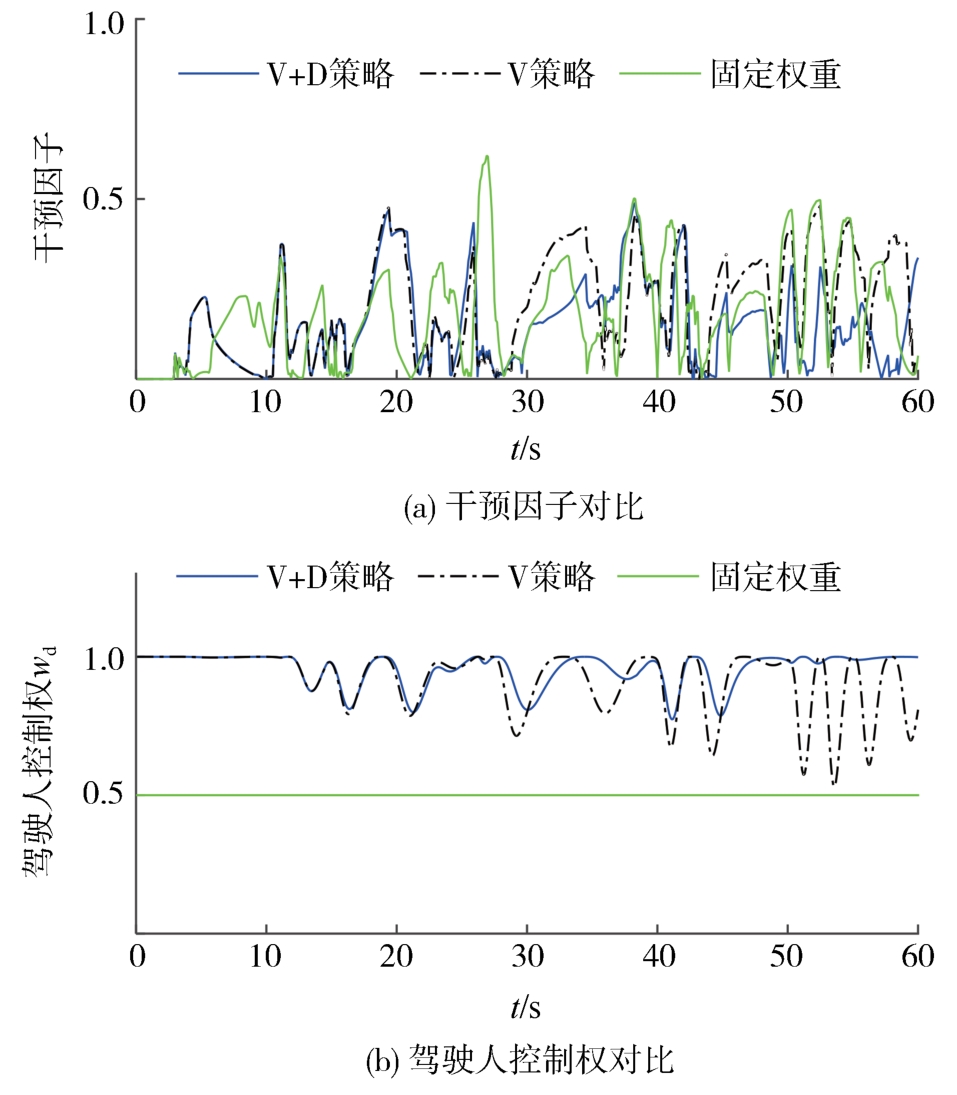
| 策略 | 均值 | 均方根误差 |
|---|---|---|
| V+D策略 | 0.147 | 0.190 |
| V 策略 | 0.196 | 0.244 |
| 固定权重策略 | 0.179 | 0.228 |
"
"
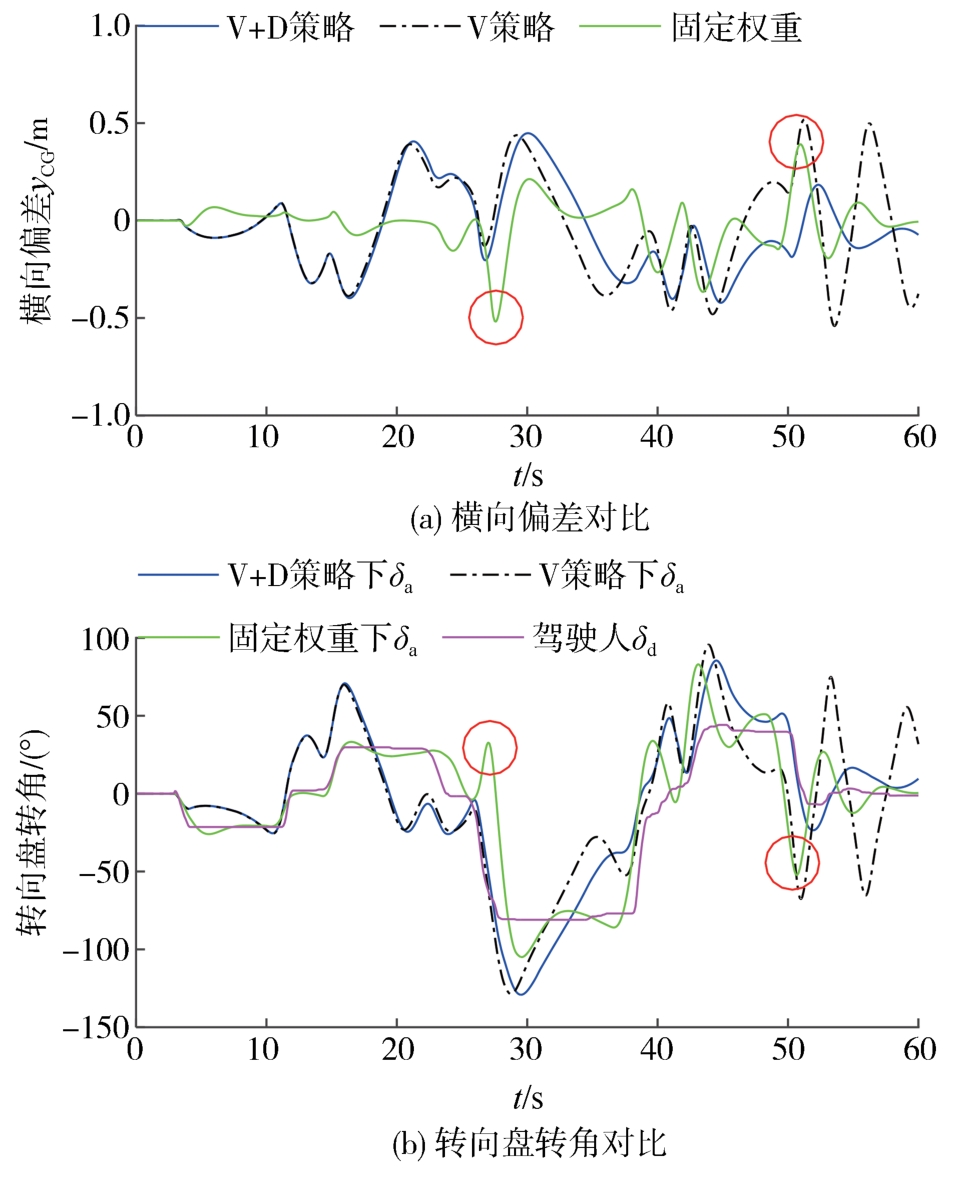
| 策略 | |||
|---|---|---|---|
| V+D策略 | 72.5 | 17.5 | 10.0 |
| V 策略 | 59.33 | 25.5 | 15.17 |
| 固定权重策略 | 71.17 | 12.83 | 16.0 |

"

"

"
| 1 | 杨俊儒,褚端峰,陆丽萍,等.智能汽车人机共享控制研究综述[J]. 机械工程学报, 2022,58(18):31-55. |
| YANG J R, CHU D F, LU L P, et al. Review on human-machine shared control of intelligent vehicles [J]. Journal of Mechanical Engineering, 2022,58(18):31-55. | |
| 2 | ZHENG N, LIU Z, REN P, et al. Hybrid-augmented intelligence: collaboration and cognition[J]. Frontiers of Information Technology & Electronic Engineering, 2017, 18(2):153-179. |
| 3 | MARCANO M, DÍAZ S, PÉREZ J, et al. A review of shared control for automated vehicles: theory and applications[J]. IEEE Transactions on Human-Machine Systems, 2020, 50(6): 475-491. |
| 4 | 郭柏苍,王胤霖,谢宪毅,等. 基于人-车风险状态的人机共驾控制权决策方法[J].中国公路学报,2022,35(3):153-165. |
| GUO B C, WANG Y L, XIE X Y, et al. Decision making method for control right transition of human-machine shared driving based on driver-vehicle risk state[J]. China Journal of Highway and Transport, 2022,35(3):153-165. | |
| 5 | WANG Z, DING X, ZHANG L. Chassis coordinated control for full X-by-wire four-wheel-independent-drive electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2023,72(4):4394-4410. |
| 6 | 胡云峰,曲婷,刘俊,等. 智能汽车人机协同控制的研究现状与展望[J].自动化学报, 2019,45(7): 1261-1280. |
| HU Y F, QU T, LIU J, et al. Human-machine cooperative control of intelligent vehicle: recent developments and future perspectives[J]. Acta Automatica Sinica, 2019,45(7): 1261-1280. | |
| 7 | ERLIEN S M, FUJITA S, GERDES J C. Shared steering control using safe envelopes for obstacle avoidance and vehicle stability[J]. IEEE Transactions on Intelligent Transportation Systems, 2015,17(2): 441-451. |
| 8 | TAN D, CHEN W, WANG H, et al. Shared control for lane departure prevention based on the safe envelope of steering wheel angle[J]. Control Engineering Practice, 2017,64: 15-26. |
| 9 | SENTOUH C, NGUYEN A T, BENLOUCIF M A, et al. Driver-automation cooperation oriented approach for shared control of lane keeping assist systems[J]. IEEE Transactions on Control Systems Technology, 2019,27(5):1962-1978. |
| 10 | NGUYEN A, SENTOUH C, POPIEUL J. Sensor reduction for driver-automation shared steering control via an adaptive authority allocation strategy[J]. IEEE/ASME Transactions on Mechatronics, 2018,23(1): 5-16. |
| 11 | NGUYEN A, SENTOUH C, POPIEUL J. Driver-automation cooperative approach for shared steering control under multiple system constraints: design and experiments[J]. IEEE Transactions on Industrial Electronics, 2017,64(5): 3819-3830. |
| 12 | 高振刚,陈无畏,谈东奎,等. 考虑驾驶员操纵失误的车道偏离辅助人机协同控制[J].机械工程学报,2019,55(16):91-103. |
| GAO Z G, CHEN W W, TAN D K, et al. Human-machine cooperative lane departure assist control considering driver manipulate failure[J]. Journal of Mechanical Engineering, 2019,55(16):91-103. | |
| 13 | SENTOUH C, DEBERNARD S, POPIEUL J, et al. Toward a shared lateral control between driver and steering assist controller[C]. Analysis, Design, and Evaluation of Human-Machine Systems, September 1-3, 2010, Université de Valenciennes et du Hainaut Cambrésis, France,2010:404-409. |
| 14 | 陈无畏,王其东,丁雨康, 等. 基于预期偏移距离的人机权值分配策略研究[J]. 汽车工程, 2020,42(4):101-109. |
| CHEN W W, WANG Q D, DING Y K, et al. Weight allocation strategy between human and machine based on the preview distance to lane center[J]. Automotive Engineering, 2020,42(4):101-109. | |
| 15 | 田彦涛,赵彦博,谢波. 基于驾驶员转向模型的共享控制系统[J]. 自动化学报, 2022,48(7): 1664-1677. |
| TIAN Y T, ZHAO Y B, XIE B. Shared control system based on driver steering model[J]. Acta Automatica Sinica, 2022,48(7): 1664-1677. | |
| 16 | LIU R, ZHAO X, ZHU X, et al. A human-like shared driving strategy in lane-changing scenario using cooperative LPV/MPC[J]. IEEE Transactions on Intelligent Transportation Systems, 2023,24(9):9915-9928. |
| 17 | 李学鋆,汪怡平,苏楚奇,等. 考虑驾驶权动态分配的共享转向系统鲁棒控制[J].汽车工程,2022,44(11):1676-1688. |
| LI X Y, WANG Y P, SU C Q, et al. Robust control for shared steering control system based on authority level dynamic allocation[J]. Automotive Engineering, 2022,44(11): 1676-1688. | |
| 18 | SOUALMI B, SENTOUH C, POPIEUL J C, et al. Automation-driver cooperative driving in presence of undetected obstacles [J]. Control Engineering Practice, 2014,24:106-119. |
| 19 | DONG J, YANG G H. H∞ controller synthesis via switched PDC scheme for discrete-time T-S fuzzy systems[J]. IEEE Transactions on Fuzzy Systems, 2009,17(3): 544-555. |
| 20 | SALEH L, CHEVREL P, CLAVEAU F, et al. Shared steering control between a driver and an automation: stability in the presence of driver behavior uncertainty[J]. IEEE Transactions on Intelligent Transportation Systems, 2013,14(2):974-983. |
| [1] | Xianghao Meng,Ling Niu,Junqiang Xi,Danni Chen,Chao Lü. Risk Prediction of Heterogeneous Traffic Participants Based on Spatio-Temporal Graph Neural Networks [J]. Automotive Engineering, 2024, 46(9): 1537-1545. |
| [2] | Xiujian Yang,Yongrui Bai. Trajectory Planning for Intelligent Vehicle in Dynamic Unstructured Environment Based on the Graph Search and Optimization Methods [J]. Automotive Engineering, 2024, 46(9): 1564-1575. |
| [3] | Jing Zhao,Hao Liang,Tianxiao Xu,Yayue Xiao,Bowen Jiang. Research on Domain Specific Modeling Language for Intelligent Vehicle Cyber-Physical System [J]. Automotive Engineering, 2024, 46(8): 1370-1381. |
| [4] | Jialiang Zhu,Qiaobin Liu,Fan Yang,Lu Yang,Weihua Li. Two-Dimensional Collision Risk Prediction for Intelligent Vehicles Considering the Influence of Heterogeneous Vehicle Types [J]. Automotive Engineering, 2024, 46(8): 1414-1421. |
| [5] | Xiaolin Fan,Xudong Zhang,Yuan Zou,Xin Yin,Yingqun Liu. A Mapping and Planning Method Based on Simplified Visibility Graph [J]. Automotive Engineering, 2024, 46(7): 1249-1258. |
| [6] | Shuen Zhao,Sheng Wang,Yao Leng. Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking [J]. Automotive Engineering, 2024, 46(5): 784-794. |
| [7] | Bing Zhu,Yinzi Huang,Jian Zhao,Peixing Zhang,Jingwei Xue. A Criticality Assessment Model for the Intelligent Vehicle Test Scenario Based on the Onboard Camera Images [J]. Automotive Engineering, 2024, 46(4): 557-563. |
| [8] | Ting Chikit,Yafei Wang,Yichen Zhang,Mingyu Wu,Yile Wang. Energy-Saving Planning Method for Autonomous Driving Mining Trucks Based on Composite Dynamic Sampling [J]. Automotive Engineering, 2024, 46(4): 588-595. |
| [9] | Hongmao Qin,Shu Jiang,Tiantian Zhang,Heping Xie,Yougang Bian,Yang Li. Path Tracking Control of Intelligent Vehicle Based on Learning Model Predictive Control [J]. Automotive Engineering, 2024, 46(10): 1804-1815. |
| [10] | Zhong Zhang,Xiaojian Wu,Huihua Jiang,Chao Zhang,Yukang Wan. Model Predictive Anti-disturbance Control for Longitudinal Motion of Intelligent Vehicles Under Multi-source Disturbances [J]. Automotive Engineering, 2024, 46(10): 1816-1828. |
| [11] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [12] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [13] | Lin Hu,Gen Li,Fang Wang,Miao Lin,Ning Wu. Research on Test Scenarios of Passenger Cars and Two-Wheelers at Intersections Based on CIDAS Accident Data [J]. Automotive Engineering, 2023, 45(8): 1417-1427. |
| [14] | Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention [J]. Automotive Engineering, 2023, 45(8): 1448-1456. |
| [15] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |