Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (3): 470-480.doi: 10.19562/j.chinasae.qcgc.2025.03.009
Zichen Zheng1,2,Shu Wang1( ),Xuan Zhao1,Zhaoke Li1,3
),Xuan Zhao1,Zhaoke Li1,3
Received:2024-06-07
Revised:2024-08-15
Online:2025-03-25
Published:2025-03-21
Contact:
Shu Wang
E-mail:shuwang@chd.edu.cn
Zichen Zheng,Shu Wang,Xuan Zhao,Zhaoke Li. Integrated Control of Distributed Drive Electric Vehicle AFS/DYC Based on Hybrid Model Predictive Control[J].Automotive Engineering, 2025, 47(3): 470-480.
"
"
"
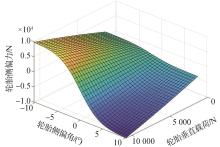
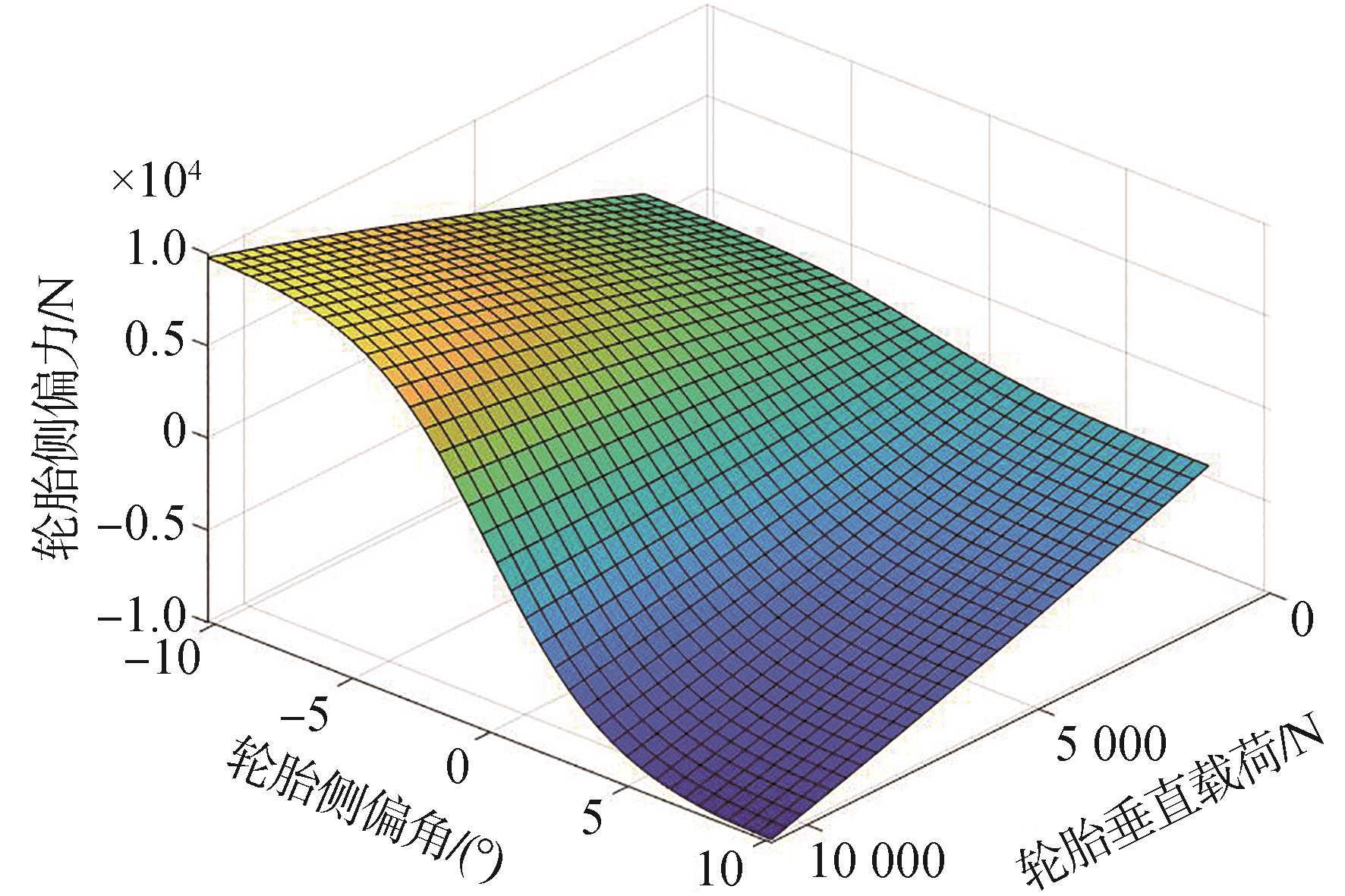
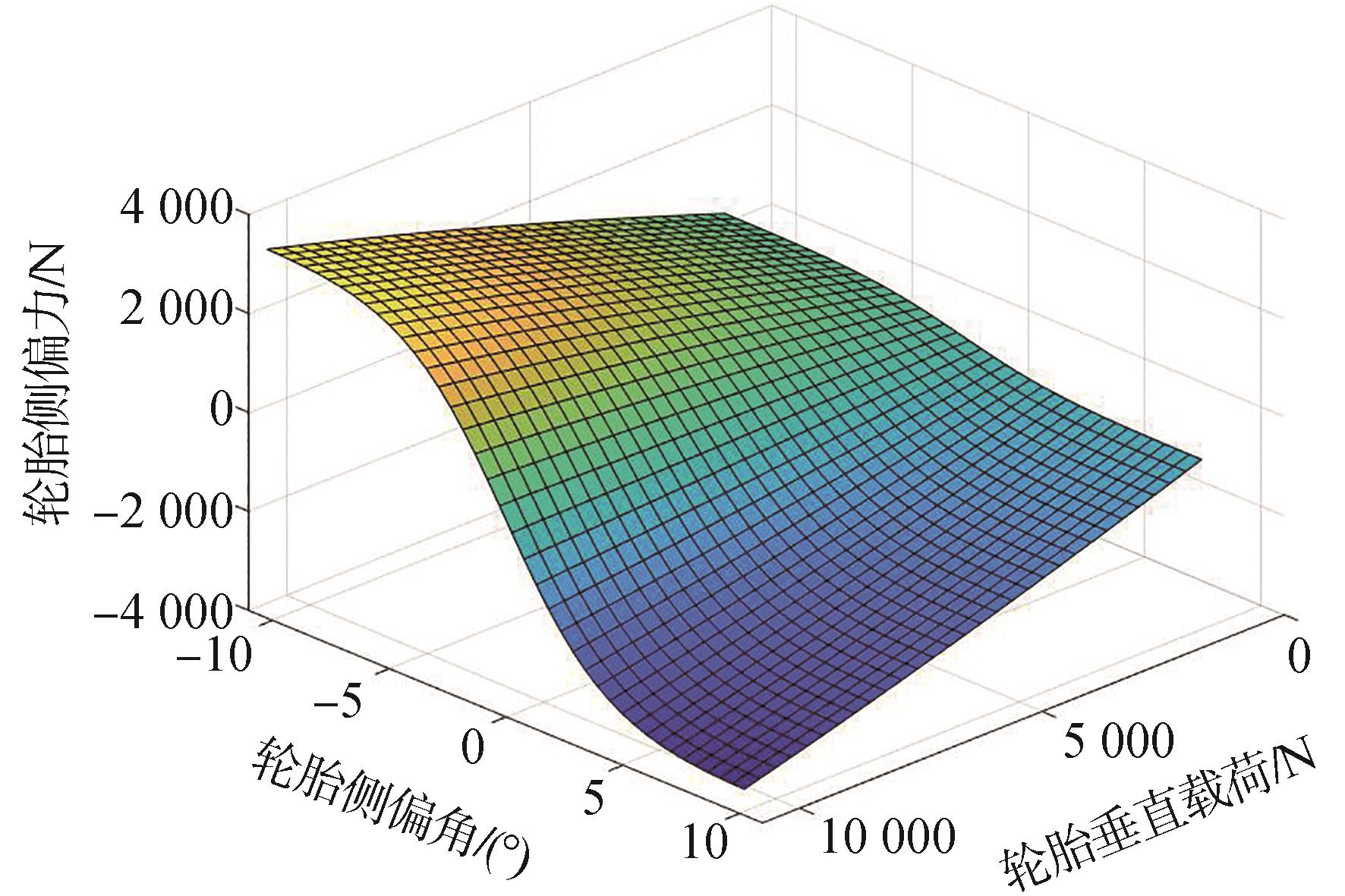
| 类别 | 数值 |
|---|---|
| 垂直载荷/N | 1 348~10 787, samples = 30 |
| 轮胎侧偏角/(°) | -10.7~10.7, samples = 40 |
| 路面附着系数 | 0.3(低), 0.85(高) |
| 最大允许力/N | 100 000 |

"

"
"
"

"

"

"
"
| 参数 | MPC | HMPC |
|---|---|---|
| 预测时域 P | 10 | 10 |
| 控制时域 U | 3 | 3 |
| 控制器步长 /s | 0.001 | 0.001 |
| 权重系数 Q | diag(100,45) | diag(100,45) |
| 权重系数 R | diag(15,0.38) | diag(15,0.38) |
| 采样时间 /s | 0.002 | 0.002 |
| 控制周期 /s | 0.022 | 0.020 |
"
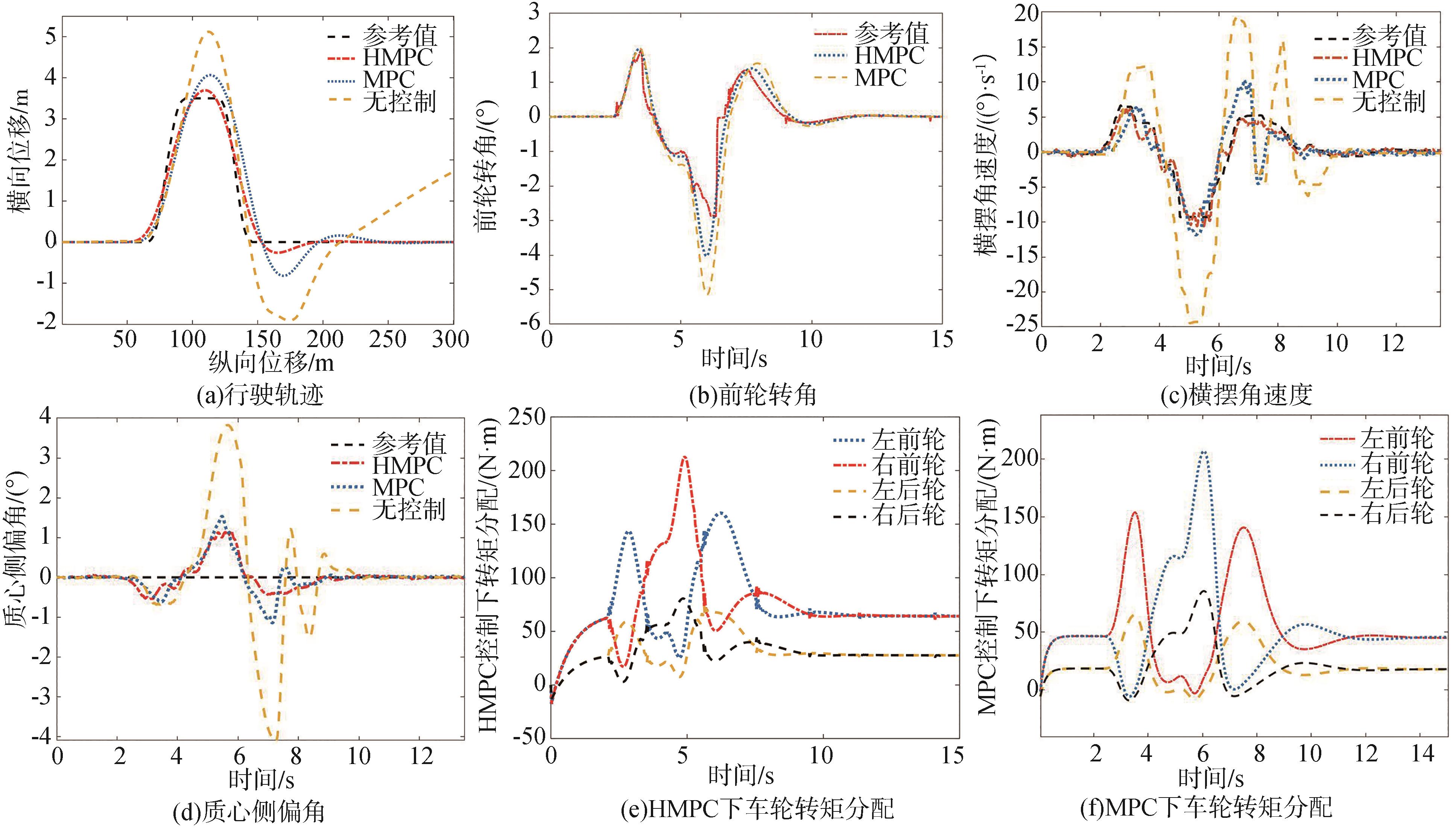
| 控制策略 | 横摆角速度/((°)·s-1) | 质心侧偏角/(°) | 横向位移/ m |
|---|---|---|---|
| 无控制 | 24.37 | 4.08 | 5.12 |
| MPC | 11.82 | 1.53 | 4.06 |
| HMPC | 9.24 | 1.15 | 3.69 |
"
| 控制策略 | 横摆角速度/((°)·s-1) | 质心侧偏角/(°) |
|---|---|---|
| 无控制 | 8.44 | 1.37 |
| MPC | 1.36 | 0.41 |
| HMPC | 0.93 | 0.33 |

"
"
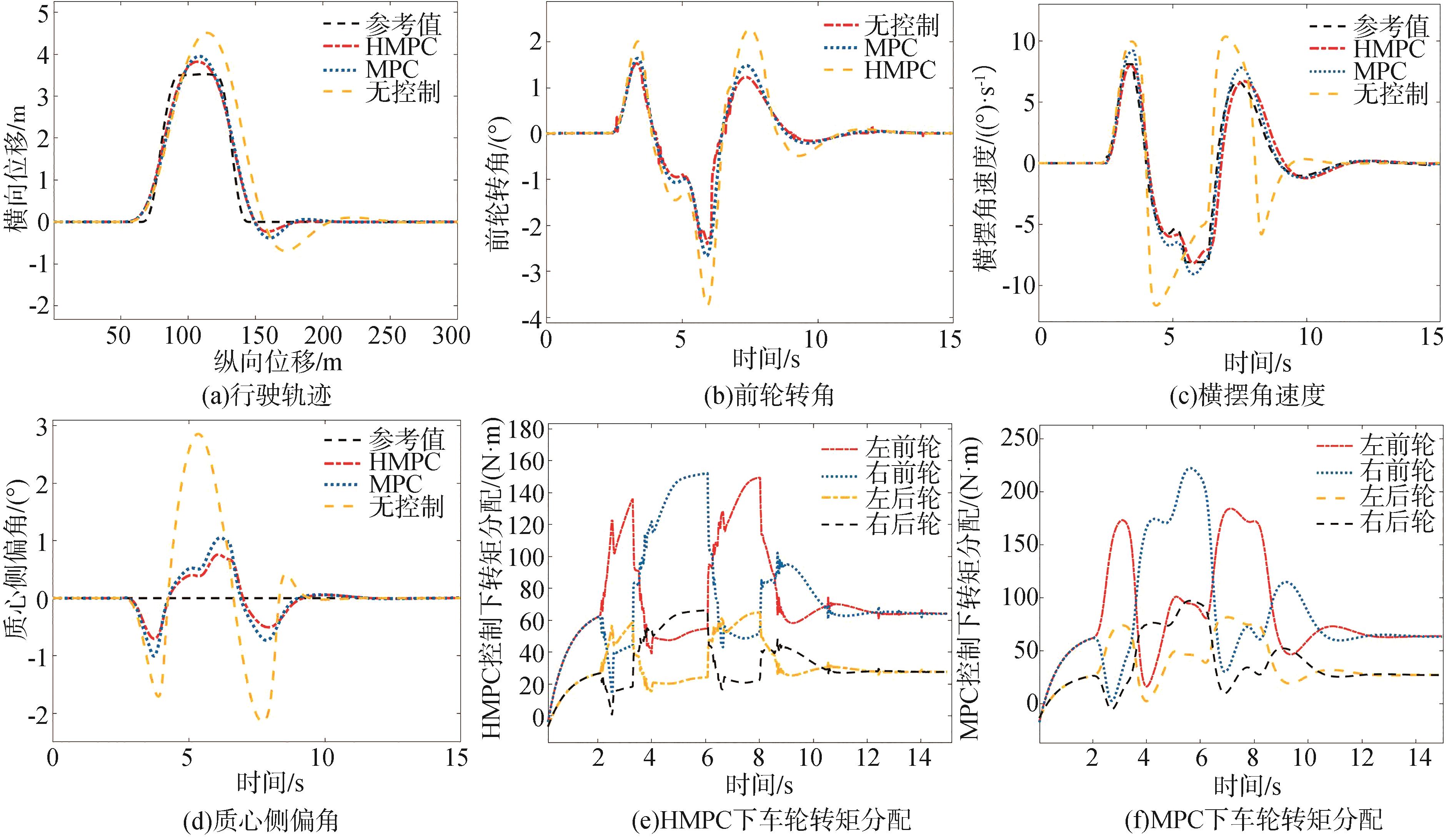
| 控制策略 | 横摆角速度/((°)·s-1) | 质心侧偏角/(°) | 横向位移/m |
|---|---|---|---|
| 无控制 | 11.61 | 2.84 | 4.51 |
| MPC | 8.74 | 1.05 | 3.95 |
| HMPC | 7.91 | 0.75 | 3.82 |
"
| 控制策略 | 横摆角速度/((°)·s-1) | 质心侧偏角/(°) |
|---|---|---|
| 无控制 | 3.76 | 1.02 |
| MPC | 0.69 | 0.37 |
| HMPC | 0.51 | 0.28 |
| 1 | 苏亮,张锋,肖红超,等.分布式驱动电动汽车动力学集成控制研究进展及趋势[J].汽车工程学报,2022,12(6):715-733. |
| SU Liang, ZHANG Feng, XIAO Hongchao, et al. Research progress and trend of integrated dynamics control of distributed driven electric vehicles[J]. Chinese Journal of Automotive Engineering, 2022, 12(6):715-733. | |
| 2 | ZHENG Z, WANG S, ZHAO X, et al. Adaptive model predictive control of four-wheel drive intelligent electric vehicles based on stability probability under extreme braking conditions[J]. IEEE Transactions on Intelligent Vehicles, 2024. |
| 3 | 李刚,宗长富,陈国迎,等.线控四轮独立驱动轮毂电机电动车集成控制[J].吉林大学学报(工学版),2012,42(4):796-802. LI Gang, ZONG Changfu, CHEN Guoying, et al. Integrated control for X-by-wire electric vehicle with 4 independently driven in-wheel motors[J]. Journal of Jilin University (Engineering and Technology Edition), 2012,42(4):796-802. |
| 4 | 赵轩,王姝,马建,等.分布式驱动电动汽车底盘集成控制技术综述[J].中国公路学报,2023,36(4):221-248. |
| ZHAO Xuan, WANG Shu, MA Jian, et al. Review of chassis integrated control technology for distributed drive electric vehicles[J]. China Journal of Highway and Transport, 2023,36(4):221-248. | |
| 5 | 杜荣华, 米思雨, 胡林, 等. 分布式驱动电动汽车复合制动系统转矩分配控制策略仿真[J]. 汽车工程, 2019, 41(3): 327-333. |
| DU Ronghua, MI Siyu, HU Lin, et al. Simulation on control strategy for torque distribution of compound brake system in a distributed drive electric vehicle[J]. Automotive Engineering, 2019, 41(3): 327-333. | |
| 6 | ZHENG Z, ZHAO X, WANG S, et al. Extension coordinated control of distributed-driven electric vehicles based on evolutionary game theory[J]. Control Engineering Practice, 2023, 137: 105583. |
| 7 | ZHAO B, XU N, CHEN H, et al. Stability control of electric vehicles with in-wheel motors by considering tire slip energy[J].Mechanical Systems and Signal Processing, 2019, 118: 340-359. |
| 8 | 周兵,邱香,吴晓建,等.基于UKF车辆状态及路面附着系数估计的AFS控制[J].湖南大学学报(自然科学版),2019,46(8):1-8. |
| ZHOU Bing, QIU Xiang, WU Xiaojian, et al. AFS control based on estimation of vehicle state and road coefficient using UKF method[J]. Journal of Hunan University (Natural Sciences), 2019,46(8):1-8. | |
| 9 | YUE S, FAN Y. Hierarchical direct yaw-moment control system design for in-wheel motor driven electric vehicle[J]. International Journal of Automotive Technology, 2018, 19(4): 695-703. |
| 10 | NAHIDI A, KASAIEZADEH A, KHOSRAVANI S,et al. Modular integrated longitudinal and lateral vehicle stability control for electric vehicles[J]. Mechatronics, 2017, 44: 60-70. |
| 11 | WANG H, ZHOU J, HU C, et al. Vehicle lateral stability control based on stability category recognition with improved brain emotional learning network[J]. IEEE Transactions on Vehicular Technology, 2022, 71.6: 5930-5943. |
| 12 | SUN X, WU P, CAI Y, et al. Piecewise affine modeling and hybrid optimal control of intelligent vehicle longitudinal dynamics for velocity regulation[J]. Mechanical Systems and Signal Processing, 2022, 162: 108089. |
| 13 | STEYAERT B W, SWINT E, PENNINGTON W W, et al. Piecewise affine modeling of wound-rotor synchronous machines for real-time motor control[J]. IEEE Transactions on Industrial Electronics, 2022, 70(6): 5571-5580. |
| 14 | SUN X, ZHANG H, CAI Y, et al. Hybrid modeling and predictive control of intelligent vehicle longitudinal velocity considering nonlinear tire dynamics[J]. Nonlinear Dynamics, 2019, 97: 1051-1066. |
| 15 | CHENG S, LI L, MEI M, et al. Multiple-objective adaptive cruise control system integrated with DYC[J]. IEEE Transactions on Vehicular Technology, 2019, 68(5): 4550-4559. |
| 16 | FERRARI-TRECATE G, MUSELLI M, LIBERATI D, et al. A clustering technique for the identification of piecewise affine systems[J]. Automatica, 2003, 39(2): 205-217. |
| 17 | PHAM H T, YANG B S. A hybrid of nonlinear autoregressive model with exogenous input and autoregressive moving average model for long-term machine state forecasting[J]. Expert Systems with Applications, 2010, 37(4): 3310-3317. |
| 18 | 黄耀波,刘佳新,徐祖华,等.基于PWA融合模型的注塑过程保压段建模及控制策略[J].化工学报,2020,71(3):1103-1110. |
| HUANG Yaobo, LIU Jiaxin, XU Zuhua, et al. Modeling and control strategy for packing-stage of injection molding process based on PWA fusion model[J]. CIESC Journal,2020,71(3):1103-1110. | |
| 19 | SUN X, CAI Y, WANG S, et al. Optimal control of intelligent vehicle longitudinal dynamics via hybrid model predictive control[J]. Robotics and Autonomous Systems, 2019, 112: 190-200. |
| 20 | 胡启国, 陆伟. 基于分段仿射模型的非线性悬架预测控制[J]. 汽车安全与节能学报, 2019, 10(3): 285-292. |
| HU Qiguo, LU Wei. Nonlinear suspension predictive control based on piecewise affine model[J]. Journal of Automotive Safety and Energy, 2019,10(3):285-292. | |
| 21 | 柳江, 陈朋, 李道飞. 基于相平面方法的车辆稳定性控制[J]. 工程设计学报, 2016, 23(5): 409-416. |
| LIU Jiang, CHEN Peng, LI Daofei.Vehicle stability control based on phase-plane method[J]. Chinese Journal of Engineering Design, 2016, 23(5): 409-416. | |
| 22 | 孙晓强,胡伟伟,吴鹏程,等.轮胎非线性纵滑力学特性的分段仿射辨识建模方法[J].西安交通大学学报,2021,55(7):52-60. |
| SUN Xiaoqiang, HU Weiwei, WU Pengcheng, et al. Modeling of tire longitudinal-slip mechanical characteristics based on piecewise affine identification method[J]. Journal of Xi’an Jiaotong University,2021,55(7):52-60. | |
| 23 | ZUO Z, YANG X, LI Z, et al. MPC-based cooperative control strategy of path planning and trajectory tracking for intelligent vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2020, 6(3): 513-522. |
| 24 | 张鹏. 基于混合逻辑动态的混杂系统建模及其模型预测控制[D]. 长春: 吉林大学, 2007. |
| ZHANG Peng. Model predictive control for hybrid systems based on mixed logic dynamical model[D]. Changchun: Jilin University, 2007. | |
| 25 | TORRISI F D, BEMPORAD A. HYSDEL-a tool for generating computational hybrid models for analysis and synthesis problems[J]. IEEE Transactions on Control Systems Technology, 2004, 12(2): 235-249. |
| 26 | WANG W, YAN J, WANG H, et al. Adaptive MPC trajectory tracking for AUV based on Laguerre function[J]. Ocean Engineering, 2022, 261: 111870. |
| 27 | MORRISON D R, JACOBSON S H, SAUPPE J J, et al. Branch-and-bound algorithms: a survey of recent advances in searching, branching, and pruning[J]. Discrete Optimization, 2016, 19: 79-102. |
| 28 | 王姝,张海川,赵轩,等.融合稳定性的分布式驱动电动汽车路径跟踪控制策略研究[J].中国机械工程,2023,34(9):1035-1044. |
| WANG Shu, ZHANG Haichuan, ZHAO Xuan, et al. Research on path tracking control method of distributed drive electric vehicles with integrated stability[J]. China Mechanical Engineering,2023,34(9):1035-1044. |
| [1] | Yubo Lian,Bengang Yi,Yingying Cui,Hongsheng Tian,Junfei Yan,Chen Cheng. Research on Integrated Design of Battery Pack and Car Body Based on Torsional Stiffness [J]. Automotive Engineering, 2023, 45(4): 647-653. |
| [2] | Qin Li,Jianming Tang,Boyuan Zhang,Yong Chen,Yong Wang. Research on Fault-Tolerant Control of Multi-Actuator for Distributed Drive Electric Vehicles [J]. Automotive Engineering, 2023, 45(12): 2251-2259. |
| [3] | Qiang Song,Guanfeng Wang,He Shang,Nianzhong Zhang. Research on Handling Stability Control Strategy for Distributed Drive Electric Vehicle Based on Multi-parameter Control [J]. Automotive Engineering, 2023, 45(11): 2104-2112. |
| [4] | Haodi Li,Zhiguo Zhao,Peng Tang,Yongping Hou. Power Split Hybrid System Mode Transition Performance Test Method Based on Load Compensation [J]. Automotive Engineering, 2023, 45(10): 1908-1922. |
| [5] | Xiaoyan Peng,Xingfei Xing,Qingjia Cui,Jing Huang. Research on Driving Force Distribution Control Method of Distributed Electric Vehicles [J]. Automotive Engineering, 2022, 44(7): 1059-1068. |
| [6] | Shengzhao Chen,Minyi Zheng,Qihui Ling,Zhewu Chen. An Investigation on the Characteristics of Hydraulically Interconnected Suspension System with Dual Accumulators [J]. Automotive Engineering, 2022, 44(2): 272-279. |
| [7] | Yingzhao Ma,Tianyi Yan,Yanle Zhao. Research on Integrated Control Strategy of a New⁃Type Electronically Controlled Air Suspension System [J]. Automotive Engineering, 2021, 43(9): 1394-1401. |
| [8] | Yutian Zhang,Feiran Li,Hanqing Tian,Jibin Hu,Chao Wei,Wei Wu. Research on Decoupling Control of Integrated Dynamics System of Unmanned Vehicle Chassis [J]. Automotive Engineering, 2021, 43(11): 1673-1682. |
| [9] | Zhao Zhiguo, Tang Xuhui, Fu Jing, Fan Jiaqi. Optimal Control of Engine Shutdown for Power-Split Hybrid System [J]. Automotive Engineering, 2020, 42(8): 993-999. |
| [10] | Qi Hengmin, Zhang Nong, Wang Dong, Zhang Bangji, Zheng Minyi. Study on Dynamic Performance of a Bus Equipped with Electronically Controlled Air Spring and Hydraulically Interconnected Suspension [J]. Automotive Engineering, 2020, 42(3): 330-338. |
| [11] | Guo Jinghua, Li Wenchang, Wang Jingyao, Li Keqiang. Multi-objective Integrated Adaptive Cruise and Regenerative Braking Control of Intelligent Electric Vehicles [J]. Automotive Engineering, 2020, 42(12): 1638-1646. |
| [12] | Liu Kai, Chen Huiyan, Gong Jianwei, Chen Shuping, Zhang Yu. A Research on Handling Stability of High-speed Unmanned Vehicles [J]. Automotive Engineering, 2019, 41(5): 514-521. |
| [13] | Zeng Xiaohua, Li Guanghan, Song Dafeng, Zhu Guanghai & Wang Yinshu. Analysis of Theoretical Fuel Consumption of Hybrid Electric System Based on Energy Calculation Model [J]. , 2019, 41(3): 266-274. |
| [14] | Yang Ye, Zhang Youtong, Shan Xiaoming. Research on Hybrid Mode Transition Control with Engine Start [J]. Automotive Engineering, 2019, 41(12): 1356-1364. |
| [15] | Ke Jun, Shi Wenku, Yuan Ke. Study on Damping Characteristics of Composite Leaf Spring Based on Vehicle Performance [J]. Automotive Engineering, 2019, 41(12): 1424-1429. |
|
||