Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (9): 1686-1699.doi: 10.19562/j.chinasae.qcgc.2025.09.005
Guang Xia1,3( ),Shibiao Wu1,Yang Zhang2,Heng Wei1,Xianyang Liu1
),Shibiao Wu1,Yang Zhang2,Heng Wei1,Xianyang Liu1
Received:2025-02-21
Revised:2025-04-08
Online:2025-09-25
Published:2025-09-19
Contact:
Guang Xia
E-mail:xiaguang008@hfut.edu.cn
Guang Xia,Shibiao Wu,Yang Zhang,Heng Wei,Xianyang Liu. Deep Reinforcement Learning Control of Multi-dimensional Coupled Stability of Off-road Vehicles[J].Automotive Engineering, 2025, 47(9): 1686-1699.

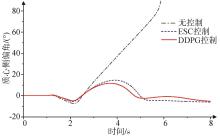
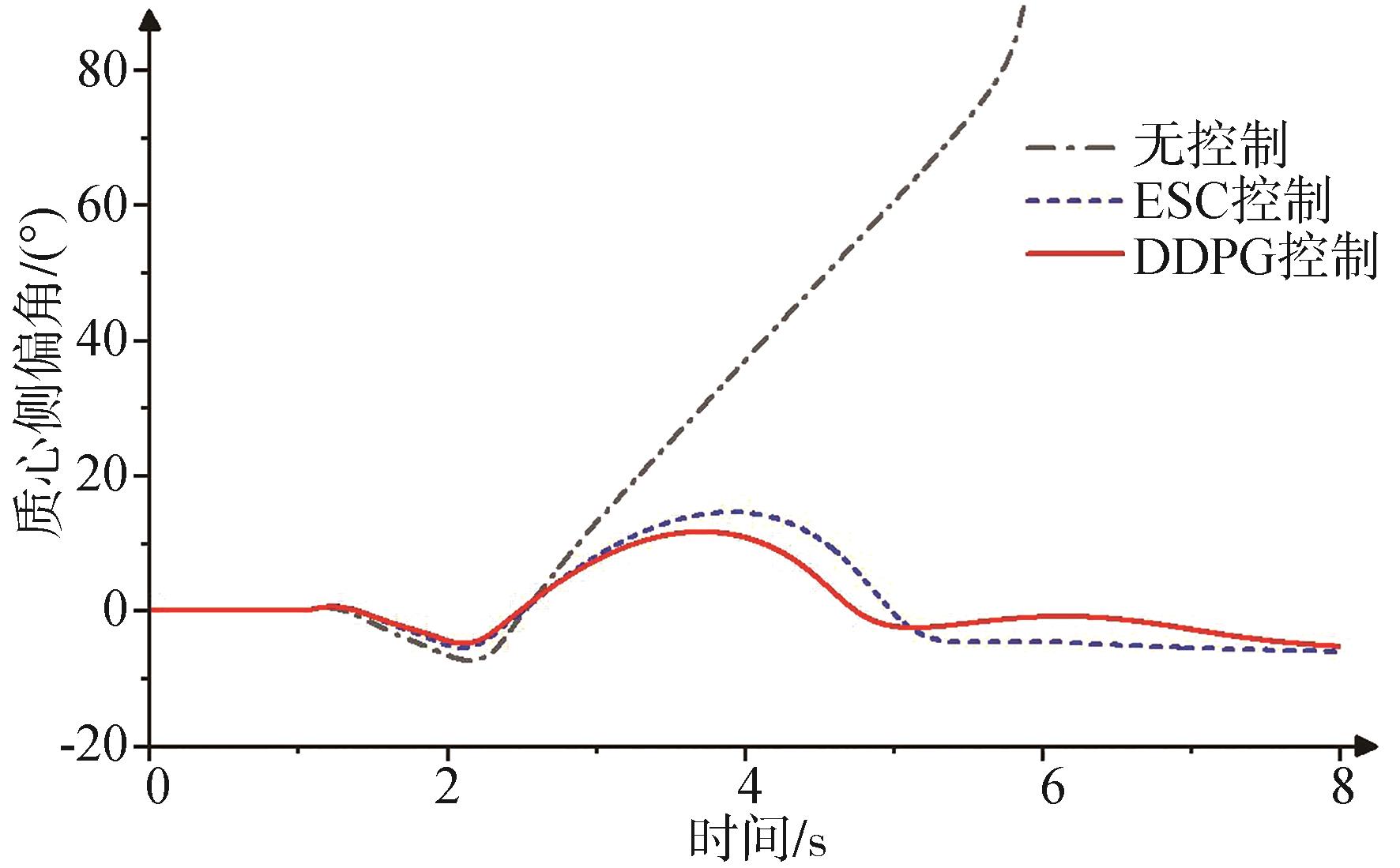
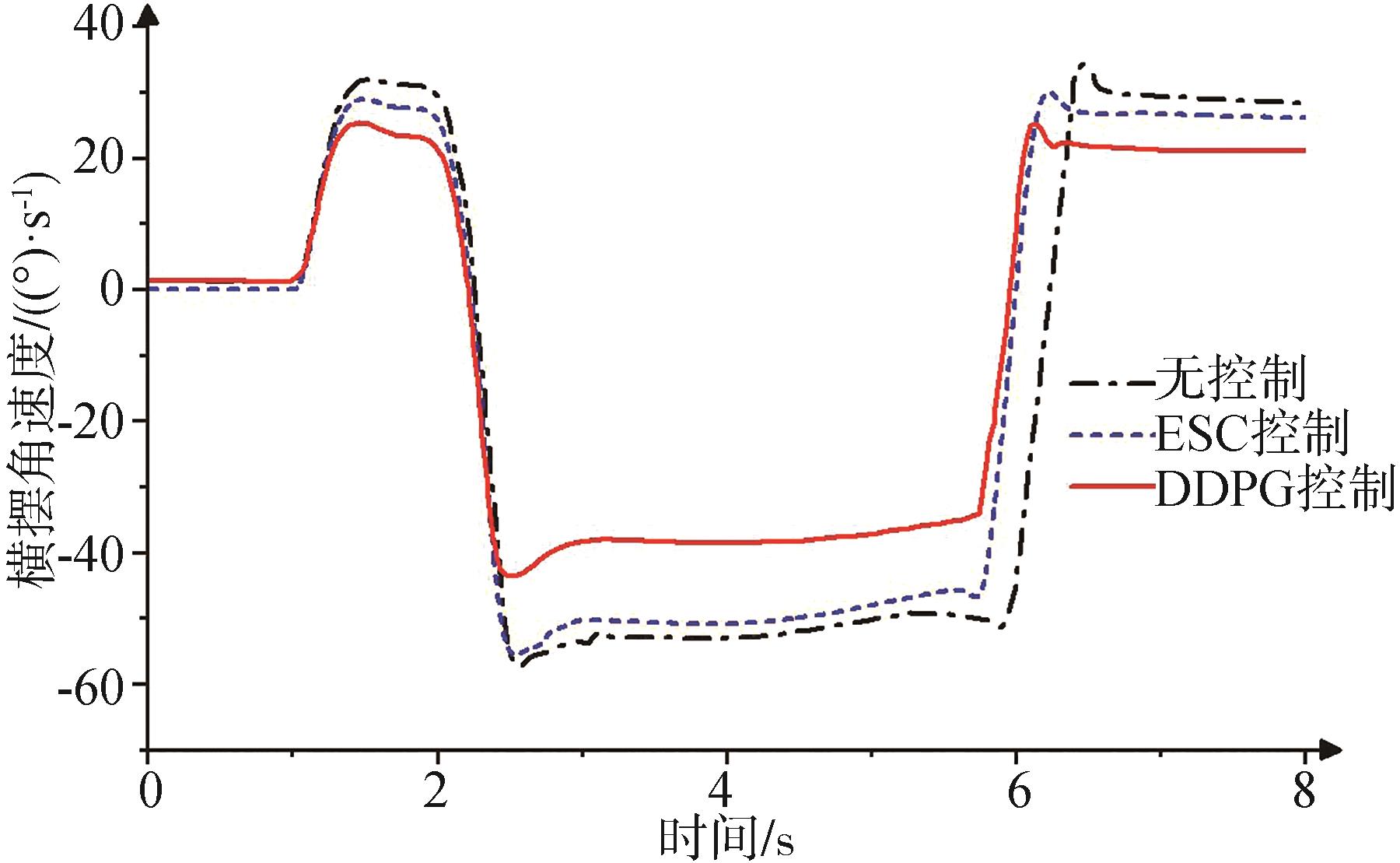
"

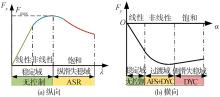
"

"


"
"
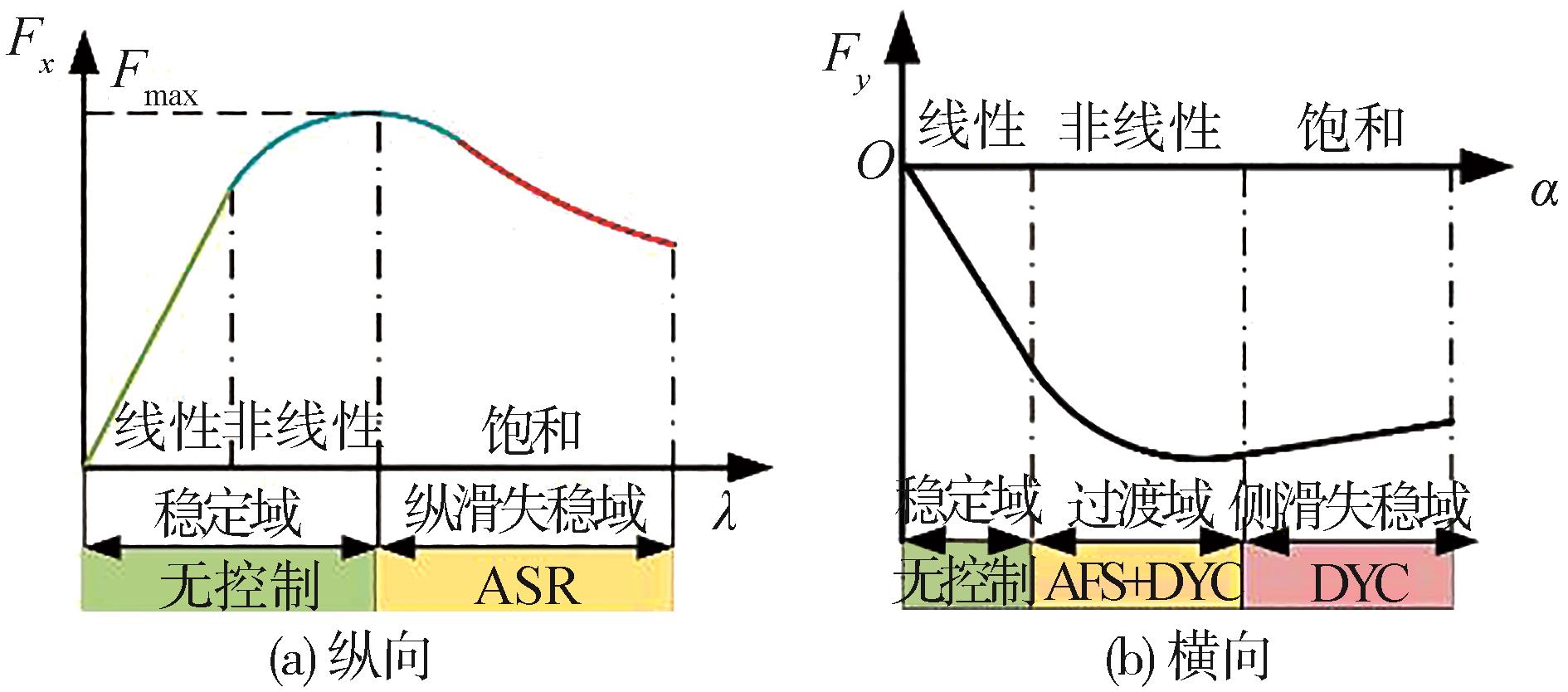
| 算法类型 | 网络类型 | 网络符号 | 动作公式 |
|---|---|---|---|
| 策略网络 | Actor当前网络 | ||
| Actor目标网络 | |||
| 值网络 | Critic当前网络 | ||
| Critic目标网络 |
"
| 参数 | 数值 |
|---|---|
| 采样时间 | |
| 策略网络学习率 | |
| 值网络学习率 | |
| 折扣系数 | |
| 经验池大小 | |
| 经验池采样数 | |
| 软更新率 |
"
"
"
"
"
"
| 参数 | 数值 |
|---|---|
| 整车质量 | 1 800 |
| 簧上质量 | 1 590 |
| 前轴至质心距离 | 1.18 |
| 后轴至质心距离 | 1.77 |
| 轴距 | 2.95 |
| 轮距 | 1.575 |
| 侧倾中心高度 | 0.33 |
| 质心高度 | 0.72 |
| 侧倾转动惯量 | 984.4 |
| 横摆转动惯量 | 2 687.1 |
| 前后悬架阻尼系数 | 250 |
| 前后悬架弹簧刚度 | 50 000 |
| 轮胎转动惯量 | 2.8 |
| 轮胎半径 | 0.402 |
| 阻力臂距 | 0.01 |
| 前轮侧偏刚度 | 11 000 |
| 后轮侧偏刚度 | 13 000 |
"
"
"
"
"
"

"
"
"
"
"
"
"

"
"
"
"

"
"

"
| [1] | 胡宇辉, 王旭, 胡家铭, 等.越野环境下无人驾驶车辆技术研究综述[J]. 北京理工大学学报, 2021, 41: 1137-1144. |
| HU Y H, WANG X, HU J M, et al. An overview on unmanned vehicle technology in off-road environment[J]. Transactions of Beijing Institute of Technology, 2021, 41: 1137-1144. | |
| [2] | National Highway Traffic Safety Administeration (NHTSA). National automotive sampling system [EB/OL]. http://www.nhtsa.gov/NASS. |
| [3] | HEQIMI G, GATES T J, KAY J. Using spatial interpolation to determine impacts of annual snowfall on traffic crashes for limited access freeway segments[J]. Accident Analysis, 2018, 121: 202-212. |
| [4] | RAJESH R. Vehicle dynamics and control [M]. New York: Springer, 2012. |
| [5] | THOMAS D G. Fundamentals of vehicle dynamics [M]. Warrendale: SAE International, 1992. |
| [6] | 潘公宇, 丁聪, 李韵. 基于零力矩点的车辆侧倾评价指标及侧倾控制研究[J]. 机械工程学报, 2023, 59(1): 175-187. |
| PAN G Y, DING C, LI Y. Vehicle roll evaluation index based on ZMP position and roll control research[J]. Journal of Mechanical Engineering, 2023, 59(1): 175-187. | |
| [7] | LI X, CHAN C Y, WANG Y. A reliable fusion methodology for simultaneous estimation of vehicle sideslip and yaw angles[J]. IEEE Transactions on Vehicular Technology, 2015, 65(6): 4440-4458. |
| [8] | 杨炜, 魏朗, 刘晶郁. 商用车横向稳定性优化控制联合仿真分析[J]. 机械工程学报, 2017, 53(2): 115-123. |
| YANG W, WEI L, LIU J Y. Co-simulation analysis of commercial vehicle lateral stability optimization control[J]. Journal of Mechanical Engineering, 2017, 53(2): 115-123. | |
| [9] | 严周栋, 杭鹏, 陈重璞, 等.分布式电驱动装载机驱动防滑控制[J]. 汽车工程, 2023, 45: 1944-1953. |
| YAN Z D, HANG P, CHEN C P, et al. Drive anti-skid control of distributed electric drive loader[J]. Automotive Engineering, 2023, 45: 1944-1953. | |
| [10] | ZIREK A, VOLTR P, LATA M. Validation of an anti-slip control method based on the angular acceleration of a wheel on a roller rig[J]. Proceedings of the Institution of Mechanical Engineers, 2020, 234(9): 1029-1040. |
| [11] | CHEN Z, ZHU B, ZHAO J, et al. Longitudinal and lateral coupling vehicle stability controller designed based on piecewise TS fuzzy model[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2023: 09544070231157134. |
| [12] | LI L, LU Y, WANG R, et al. A three-dimensional dynamics control framework of vehicle lateral stability and rollover prevention via active braking with MPC[J]. IEEE Transactions on Industrial Electronics, 2016, 64(4): 3389-3401. |
| [13] | 宋能学. 基于DDPG的智能汽车稳定性控制方法研究[D]. 合肥: 合肥工业大学, 2019. |
| SONG N X. Research on stability control method of intelligent vehicle based on DDPG[D]. Hefei:Hefei University of Technology, 2019. | |
| [14] | QIN P, TAN H, LI H, et al. Deep reinforcement learning car-following model considering longitudinal and lateral control[J]. Sustainability, 2022, 14(24): 16705. |
| [15] | 汪洪波, 王春阳, 赵林峰, 等.基于强化学习的智能车辆路径跟踪变参数MPC多目标控制[J]. 中国公路学报, 2024: 1-19. |
| WANG H B, WANG C Y, ZHAO L F, et al. Variable-parameter MPC multi-objective control for intelligent vehicle path tracking based on reinforcement learning[J]. China Journal of Highway and Transport, 2024: 1-19. | |
| [16] | 沈法鹏, 赵又群, 赵洪光, 等.非线性轮胎侧向力对汽车转向稳定性的影响[J]. 中国机械工程, 2015, 26: 135. |
| SHEN F P, ZHAO Y Q, ZHAO H G, et al. Effects of nonlinear tire lateral force on vehicle steering stability[J]. China Mechanical Engineering, 2015, 26: 135. | |
| [17] | DING X, WANG Z, ZHANG L, et al. A comprehensive vehicle stability assessment system based on enabling tire force estimation[J]. IEEE Transactions on Vehicular Technology, 2022, 71(11): 11571-11588. |
| [18] | SORNIOTTI A, D'ALFIO N. Vehicle dynamics simulation to develop an active roll control system[C]. SAE Paper 2007-01-0828. |
| [19] | 赵治国, 顾君, 余卓平. 四轮驱动混合动力轿车驱动防滑控制研究[J]. 机械工程学报, 2011, 47(14): 83-98. |
| ZHAO Z G, GU J, YU Z P. Study of acceleration slip regulation strategy for four wheel drive hybrid electric car[J]. Journal of Mechanical Engineering, 2011, 47(14): 83-98. | |
| [20] | GUP R Q, YUAN L, XIE J Z. Implement of handling and stability road test of passenger vehicle for ISO standards[J]. Applied Mechanics and Materials, 2014, 568: 1869-1874. |
| [1] | Yingjiu Pan,Yi Xi,Yansen Liu,Wenpeng Fang,Wenshan Zhang. An Energy Consumption Prediction-Based Optimization Strategy for Eco-driving of Connected Electric Buses [J]. Automotive Engineering, 2025, 47(5): 839-850. |
| [2] | Pei Fu,Huaxi Zhang,Xu Cai,Zijian Lan,Qingshan Liu,Yisong Chen. Research on Collaborative Control of Fuel Cell Gas Supply System Based on Auto-disturbance Rejection Control [J]. Automotive Engineering, 2025, 47(5): 859-874. |
| [3] | Jiahui Liu,Yuan Zou,Wei Sun,Yihao Meng,Xiaoran Lu,Yuanyuan Li. ICV Task Offloading and Resource Allocation Based on Hybrid Deep Reinforcement Learning [J]. Automotive Engineering, 2025, 47(1): 35-43. |
| [4] | Fuxing Yao,Chao Sun,Yungang Lan,Bing Lu,Bo Wang,Haiyang Yu. A Lane Change Decision Method for Intelligent Connected Vehicles Based on Mixture of Expert Model [J]. Automotive Engineering, 2024, 46(5): 882-892. |
| [5] | Xinyu Chen,Jian Chen,Lijun Qian,Qidong Wang. Research on Cooperative Optimization Method of Traffic Signal and Speed of Connected Vehicles [J]. Automotive Engineering, 2024, 46(12): 2267-2278. |
| [6] | Xiaohu Geng,Yao Fu,Jie Wang,Yulong Lei,Weidong Liu,Yuhai Wang,Ke Liu. Predictive Cruise Control for Commercial Vehicles Considering Different Time Domains [J]. Automotive Engineering, 2024, 46(11): 2046-2058. |
| [7] | Jie Li,Xiaodong Wu,Min Xu,Yonggang Liu. Reinforcement Learning Based Multi-objective Eco-driving Strategy in Urban Scenarios [J]. Automotive Engineering, 2023, 45(10): 1791-1802. |
| [8] | Manjiang Hu,Lingkun Bu,Hongmao Qin,Yan Zhou,Yougang Bian,Ning Sun,Xunjia Zheng. Modeling and Cooperative Control of Mixed Vehicle Platoon Under Multi-time Delay [J]. Automotive Engineering, 2022, 44(9): 1359-1371. |
| [9] | Liqun Peng,Yiting Wang,Yulin Ma,Xü Shucai. Cooperated Adaptive Cruise Control for Mixed Autonomous Traffic Flow [J]. Automotive Engineering, 2022, 44(8): 1153-1161. |
| [10] | Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields [J]. Automotive Engineering, 2022, 44(10): 1484-1493. |
| [11] | Wen Sun,Chenyang Li,Junnian Wang,Haozhe Qian,Wentong Zhang. Research on Ride Comfort of an Off-road Vehicle with Compound Suspension [J]. Automotive Engineering, 2022, 44(1): 105-114. |
| [12] | Hao Zhang,Qinhao Fan,Wei Wang,Jin Huang,Zhi Wang. Reinforcement Learning Based Energy Management Strategy for Hybrid Electric Vehicles Using Multi⁃mode Combustion [J]. Automotive Engineering, 2021, 43(5): 683-691. |
| [13] | Jinghua Guo,Wenchang Li,Yugong Luo,Tao Chen,Keqiang Li. Driver Car⁃Following Model Based on Deep Reinforcement Learning [J]. Automotive Engineering, 2021, 43(4): 571-579. |
| [14] | Zhenhai Gao,Xiangtong Yan,Fei Gao,Tianjun Sun. A Driver-like Decision-making Method for Longitudinal Autonomous Driving Based on DDPG [J]. Automotive Engineering, 2021, 43(12): 1737-1744. |
| [15] | Xiangmo Zhao,Xinrui Zhang,Runmin Wang,Zhigang Xu,Haijin Fan. Cooperative Optimization Control Method of Traffic Signals and Vehicle Trajectories at Connected Intersection [J]. Automotive Engineering, 2021, 43(11): 1577-1586. |
|
||