汽车工程 ›› 2022, Vol. 44 ›› Issue (5): 736-746.doi: 10.19562/j.chinasae.qcgc.2022.05.011
所属专题: 底盘&动力学&整车性能专题2022年
张奇祥1,靳立强1,靳博豪1,张伊晗1,陈鹏飞2,刘永腾3,4,李建华1( )
)
收稿日期:2021-07-19
修回日期:2021-12-02
出版日期:2022-05-25
发布日期:2022-05-27
通讯作者:
靳立强,李建华
E-mail:ljh_lotus@jlu.edu.cn
基金资助:
Qixiang Zhang1,Liqiang Jin1,Bohao Jin1,Yihan Zhang1,Pengfei Chen2,Yongteng Liu3,4,Jianhua Li1()
Received:2021-07-19
Revised:2021-12-02
Online:2022-05-25
Published:2022-05-27
Contact:
Liqiang Jin,Jianhua Li
E-mail:ljh_lotus@jlu.edu.cn
摘要:
电子机械制动系统(electro-mechanical brake system, EMB)采用电控纯机械制动技术,可实现多种主动安全控制功能,具有结构精简、响应迅速,能够对车轮制动力矩进行独立精确控制等优势。为全面梳理EMB系统的发展现状,明确其未来技术走向,本文首先介绍了EMB的组成架构,分析了EMB典型结构型式的优缺点并确定了相关内容的主要研究方向。然后从夹紧力控制和传感器故障诊断两个层面分别对国内外的研究进展展开综述;分析了夹紧力控制算法的发展历程及未来研究重点,对比了3种典型夹紧力控制算法的试验效果;接着介绍了传感器故障诊断的具体类型及作用,通过定量化的指标分析不同故障诊断算法的实际控制效果。最后对EMB系统所面临的问题及未来发展趋势进行了分析和展望,指明了进一步的研究可以集中在夹紧力控制和传感器故障诊断等算法准确性和鲁棒性的提高、EMB与线控底盘集成控制技术的协调控制以及EMB对整车稳定性和舒适性的影响等方面。
张奇祥,靳立强,靳博豪,张伊晗,陈鹏飞,刘永腾,李建华. EMB夹紧力控制与传感器故障诊断研究进展[J]. 汽车工程, 2022, 44(5): 736-746.
Qixiang Zhang,Liqiang Jin,Bohao Jin,Yihan Zhang,Pengfei Chen,Yongteng Liu,Jianhua Li. Research Progress of EMB Clamping Force Control and Sensor Fault Diagnosis[J]. Automotive Engineering, 2022, 44(5): 736-746.
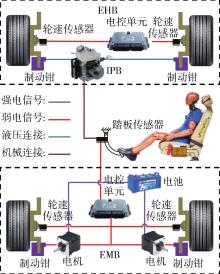
图1
线控制动系统的两种类型"
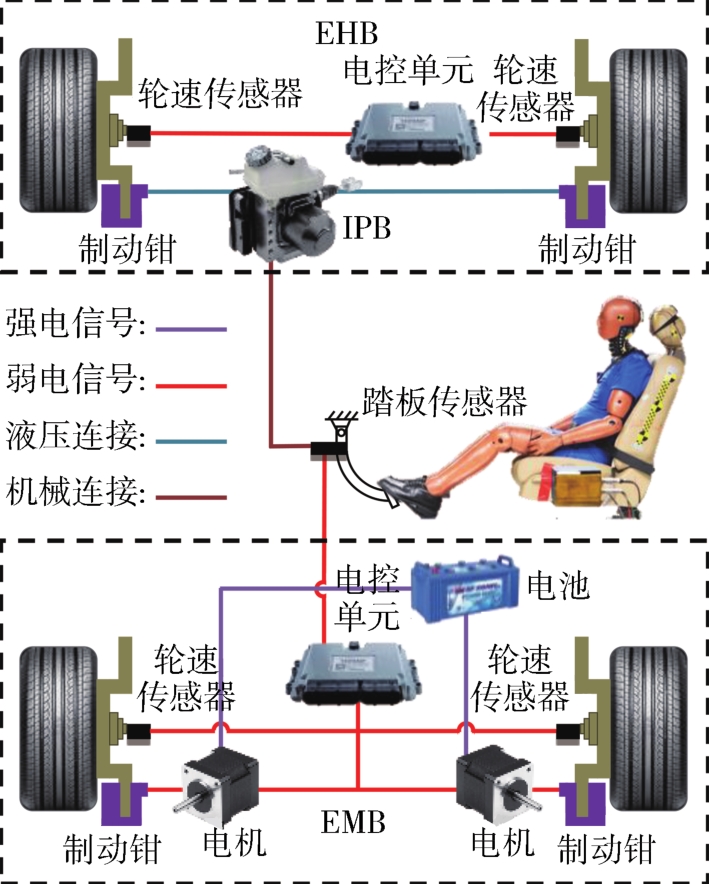
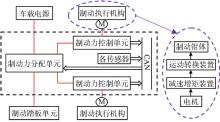
图2
EMB的组成架构"


图3
4种典型的EMB制动执行机构的结构型式简图"
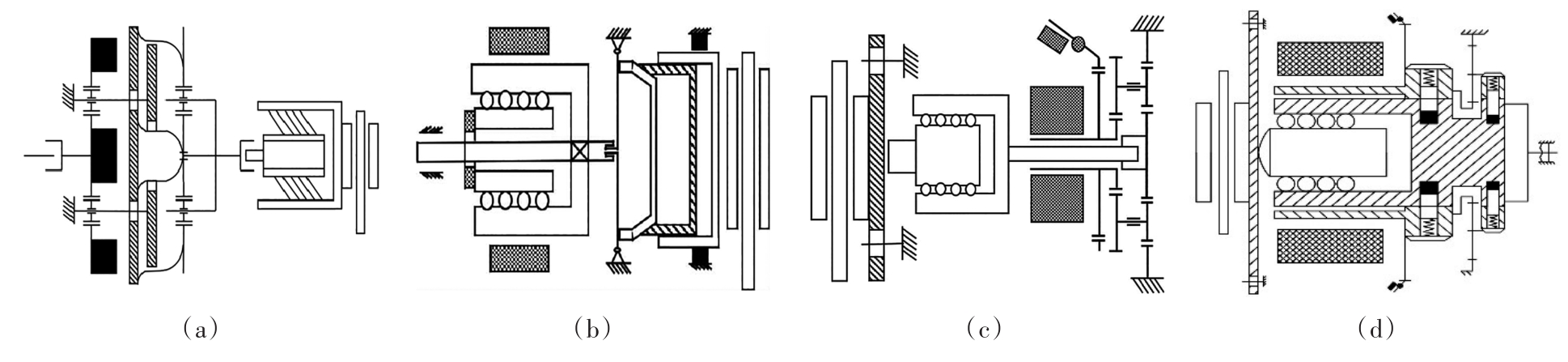
表1
4种典型的EMB制动执行机构的结构型式对比"
| 方案名称 | Bosch方案[ | Siemens方案 | Continental方案 | 同济大学方案[ |
|---|---|---|---|---|
| 电机布置形式 | 电机外置 | 电机内置 | 电机内置 | 电机内置 |
| (a) | (b) | (c) | (d) | |
| 减速增矩装置 | 两个行星齿轮 | 杠杆增力机构 | 行星轮系 | 行星齿轮 |
| 运动转换装置 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 |
| 间隙磨损调整方式 | 手动调整 | 机械结构调整 | 智能控制调整 | 智能控制调整 |
| 有无电磁离合器(销) | 两组电磁离合器 | 无 | 无 | 两组电磁离合销 |
| 优点 | 利用电磁离合器和行星轮系,可实现变减速比,提高机构响应速度;具有制动力保持功能。 | 取消一级齿轮减速装置,采用杠杆增力机构,结构简单;增矩效果明显,可有效降低电机成本;通过机械结构实现间隙自动调整。 | 一级减速为行星轮系且电机内置,结构紧凑;能自动调整间隙且精度最高;具有制动力保持和驻车功能。 | 有两个减速比,可实现变减速比传动;一级减速只有一套行星轮系,机构紧凑;能自动调整间隙且精度较高;具有制动力保持功能。 |
| 缺点 | 结构复杂且轴向尺寸偏大;需手动调整制动盘和制动垫块的间隙,可靠性较低;对电磁离合器的依赖性大,系统可靠性较差。 | 对机械工艺及加工精度要求较高;对电机转矩控制的要求高;不具备制动力保持功能。 | 减速增矩装置对制动转矩的提升有限,导致系统对电机特性的依赖性强。 | 减速增矩装置对制动转矩的提升有限,导致系统对电机特性的依赖性强;对电磁离合销依赖性强,系统可靠性较差。 |
表2
电子机械制动系统夹紧力控制方案"
| 控制算法 | 结构型式 |
|---|---|
| 前馈控制 | 外电机+减速齿轮副+滚珠丝杠[ |
| PID控制 | 内电机+行星齿轮+滚珠丝杠[ |
| 自适应PID控制 | 外电机+行星齿轮+滚珠丝杠[ |
| 摩擦补偿+PID控制 | 外电机+减速齿轮副+滚珠丝杠[ |
| 模型预测控制+PID控制 | 内电机+行星齿轮+滚珠丝杠[ |
| 非线性模型预测控制 | 内电机+行星齿轮+滚珠丝杠[ |
| 滑模变结构控制 | 外电机+减速齿轮副+滚珠丝杠+楔块[ |
| 自适应滑模变结构控制 | 外电机+两级齿轮副+行星齿轮+滚珠丝杠[ |
| 鲁棒性控制 | 外电机+行星齿轮+锥齿轮+滚轴[ |
| 鲁棒 | 内电机+行星齿轮+滚珠丝杠[ |
| 逆推法+非线性鲁棒控制 | 内电机+行星齿轮+滚珠丝杠[ |
| 准时间最优控制 | 外电机+减速齿轮副+滚珠丝杠[ |
| 遗传算法+卡尔曼滤波 | 外电机+减速齿轮副+滚珠丝杠[ |
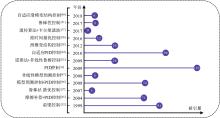
图4
电子机械制动系统夹紧力控制算法发展历程及被引情况"

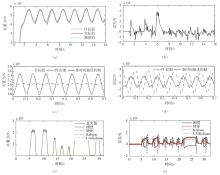
图5
EMB夹紧力试验结果及误差"

表3
夹紧力试验结果的误差分析"
| 控制算法 | 结果(图5) | 均方根 误差/N | 平均相对误差/% |
|---|---|---|---|
| 自适应滑膜变结构控制[ | (a) (b) | 124.54 | 1.82 |
| 准时间最优控制[ | (c) (d) | 119.32 | 5.23 |
| 遗传算法+卡尔曼滤波[ | (e) (f) | 324.80 | 3.14 |
表4
电子机械制动系统传感器故障诊断方案"
| 控制类型 | 诊断算法 |
|---|---|
| 现代控制 | 奉献观测器[ |
| 等价空间算法[ | |
| 等价空间算法+观测器[ | |
| 智能控制 | T-S模糊控制[ |
| 支持向量机回归算法+遗传算法[ | |
| 克隆选择算法+支持向量机回归算法[ | |
| 粒子滤波算法[ |
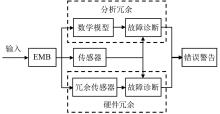
图6
硬件冗余和分析冗余"

| 1 | ZHAO J, CHEN Z, ZHU B, et al. Precise active brake-pressure control for a novel electro-booster brake system[J]. IEEE Transactions on Industrial Electronics, 2019, 67(6): 4774-4784. |
| 2 | 余卓平, 韩伟, 徐松云, 等. 电子液压制动系统液压力控制发展现状综述[J]. 机械工程学报, 2017, 53(14): 1-15. |
| YU Z, HAN W, XU S, et al. Review on hydraulic pressure control of electro-hydraulic brake system[J]. Journal of Mechanical Engineering, 2017, 53(14): 1-15. | |
| 3 | FOO G H B, ZHANG X, VILATHGAMUWA D M. A sensor fault detection and isolation method in interior permanent-magnet synchronous motor drives based on an extended kalman filter[J]. IEEE Transactions on Industrial Electronics, 2013, 60(8): 3485-3495. |
| 4 | AHN J K, JUNG K H, KIM D H, et al. Analysis of a regenerative braking system for hybrid electric vehicles using an electro-mechanical brake[J]. International Journal of Automotive Technology, 2009, 10(2): 229-234. |
| 5 | SCOBIE J, MAIOLANI M, JORDAN M. A cost efficient fault tolerant brake by wire architecture[J]. SAE Transactions, 2000,109(7):337-347. |
| 6 | 陈志成, 吴坚, 赵健, 等. 混合线控制动系统制动力精确调节控制策略[J]. 汽车工程, 2018, 40(4): 457-464. |
| CHEN Z, WU J, ZHAO J, et al. Control strategy for accurate adjustment of braking force in hybrid brake by wire system[J], Automotive Engineering, 2018, 40(4): 457-464. | |
| 7 | 余卓平, 韩伟, 熊璐, 等. 基于Byrnes-Isidori标准型的集成式电子液压制动系统液压力控制[J]. 机械工程学报, 2016, 52(22): 92-100. |
| YU Z, HAN W, XIONG L, et al. Hydraulic pressure control system of integrated-electro-hydraulic brake system based on byrnes-isidori normalized form[J]. Journal of Mechanical Engineering, 2016, 52(22): 92-100. | |
| 8 | 林逸, 沈沉, 王军, 等.汽车线控制动技术及发展[J]. 汽车技术, 2005(12): 1-3,43. |
| LIN Y, SHEN C, WANG J, et al. Automotive by-wire control technology and development[J]. Automobile Technology, 2005(12): 1-3,43. | |
| 9 | REUTER D F, LLOYD E W, ZEHNDER J W, et al. Hydraulic design considerations for EHB systems[C]. SAE Paper 2003-01-0324. |
| 10 | CHEN P, WU J, ZHAO J, et al. Design and power-assisted braking control of a novel electromechanical brake booster[C]. SAE Paper 2018-01-0762. |
| 11 | QIAO G, LIU G, SHI Z, et al. Effect of friction torque on electromechanical brake system dynamics[C]. SAE Paper 2017-01-1902. |
| 12 | JO M, BAEK Y, LEE S, et al. Performance analysis of sensor fusion models for brake pedal in a brake-by-wire system[C]. 2017 IEEE 31st International Conference on Advanced Information Networking and Applications (AINA). IEEE, 2017: 757-763. |
| 13 | BAEK S K, OH H K, KWAK M, et al. A design method of three-phase ipmsm and clamping force control of EMB for high-speed train[J]. Journal of The Korea Academia-Industrial Cooperation Society, 2018, 19(4): 578-585. |
| 14 | LANGENWALTER J, KELLY B. Virtual design of a 42V brake-by-wire system[C]. SAE Paper 2003-03-0305. |
| 15 | DE CASTRO R, TODESCHINI F, ARAUJO R E, et al. Adaptive-robust friction compensation in a hybrid brake-by-wire actuator[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2014, 228(10): 769-786. |
| 16 | 王俊鼎. 电子机械制动控制系统的研究[D]. 杭州:浙江大学, 2016. |
| WANG J. Research on electromechanical brake control system[D]. Hangzhou: Zhejiang University, 2016. | |
| 17 | 左斌. 汽车电子机械制动(EMB)控制系统关键技术研究[D]. 杭州:浙江大学, 2014. |
| ZUO B. Research on the key technologies of controller of automotive electromechanical brake system[D]. Hangzhou: Zhejiang University, 2014. | |
| 18 | 张猛. 电子机械制动系统(EMB)试验台的开发[D]. 北京:清华大学, 2004. |
| ZHANG M. Development of the test-bed of electro-mechanical brake system(EMB)[D]. Beijing: Tsinghua University, 2004. | |
| 19 | BAUMANN D, HOFMANN D, VOLLERT H, et al. Self-boosting electromechanical friction brake: U.S. Patent Application 10/584,195[P]. 2007-7-5. |
| 20 | HILZINGER J, SCHUMANN F, BLOSCH G, et al. Electromechanical wheel brake device: U.S. Patent 6,806,602[P]. 2004-10-19. |
| 21 | KELLER F. Electromagnetic wheel brake device: U.S. Patent 6,536,561[P]. 2003-3-25. |
| 22 | STEFAN H, SCHWANDORF. Brake system for a motor vehicle: U.S. Patent 6,189,981[P]. 2002-08-13. |
| 23 | WINKLER T, KLIMT A, HESS T, et al. Combined vehicle brake with electromechanically actuable parking brake: U.S. Patent 8,684,147[P]. 2014-4-1. |
| 24 | HALASY-WIMMER G, VÖLKEL J. Operating device for an electromechanically actuated disk brake: U.S. Patent 6,889,800[P]. 2005-5-10. |
| 25 | DONGIL P. Single motor electronic controlled wedge brake system: U.S. Patent 8,151,947[P]. 2012-4-10. |
| 26 | JONGSUNG K I M. Electronic wedge brake apparatus: U.S. Patent 8,733,514[P]. 2014-5-27. |
| 27 | LINE C, MANZIE C, GOOD M. Robust control of an automotive electromechanical brake[J]. IFAC Proceedings Volumes, 2007, 40(10): 579-586. |
| 28 | HANK K, KIM M, HUH K. Modeling and control of an electronic wedge brake[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2012, 226(10): 2440-2455. |
| 29 | 刘乙志, 陈辛波. 电子机械式制动器(EMB)执行机构原理方案的分析与设计[A]. 中国机械工程学会机械传动分会机构学专业委员会、上海交通大学. 中国机构与机器科学国际会议(CCMMS2010)论文集[C]. 中国机械工程学会机械传动分会机构学专业委员会、上海交通大学:中国机械工程学会机械传动专业学会机构学专业委员会, 2010: 3. |
| LIU Y, CHEN X. Structrual anaylsis and design of actuator mechanisms for the electro-mechanical brake(EMB)[A]. Mechanical Transmission Committee of Chinese Mechanical Engineering Society, Shanghai Jiaotong University. Proceedings of the International Conference on Chinese Institutions and Machine Science (CCMMS2010) [C]. Mechanical Transmission Committee of Chinese Mechanical Engineering Society, Shanghai Jiaotong University: China Machinery Institutional Professional Committee of Mechanical Transmission Professional Society of Engineering Society, 2010: 3. | |
| 30 | LI Y, SHIM T, SHIN D H, et al. Effective clamping force control for electromechanical brake system[C]. 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). IEEE, 2020: 643-648. |
| 31 | BAE J, EUM S, LEE S. Hybrid genetic algorithm and kalman filter approach to estimate the clamping force of electro-mechanical brake[J]. International Research Journal of Electronics and Computer Engineering, 2017, 3(4): 6. |
| 32 | SCHWARZ R, ISERMANN R, BÖHM J, et al. Clamping force estimation for a brake-by-wire actuator[C]. SAE Paper 1999-01-0482. |
| 33 | SARIC S, BAB-HADIASHAR A, HOSEINNEZHAD R. Clamp-force estimation for a brake-by-wire system: a sensor-fusion approach[J]. IEEE Transactions on Vehicular Technology, 2008, 57(2): 778-786. |
| 34 | PARK G, CHOI S, HYUN D. Development of clamping force estimation algorithm and clamp-force sensor calibration on electromechanical brake systems[J]. Transactions of the Korean Society of Automotive Engineers, 2016, 24(3): 365-371. |
| 35 | WEI Z, XU J, HALIM D. Clamping force control of sensor-less electro-mechanical brake actuator[C]. 2017 IEEE International Conference on Mechatronics and Automation (ICMA). IEEE, 2017: 764-769. |
| 36 | PARK G, CHOI S, HYUN D. Clamping force estimation based on hysteresis modeling for electro-mechanical brakes[J]. International Journal of Automotive Technology, 2017, 18(5): 883-890. |
| 37 | LEE Y O, JANG M, LEE W, et al. Novel clamping force control for electric parking brake systems[J]. Mechatronics, 2011, 21(7): 1156-1162. |
| 38 | FU Y F, HU X H, WANG W R, et al. Simulation and experimental study of a new electromechanical brake with automatic wear adjustment function[J]. International Journal of Automotive Technology, 2020, 21(1): 227-238. |
| 39 | MARON C, DIECKMANN T, HAUCK S, et al. Electromechanical brake system: actuator control development system[C]. SAE Paper 970814. |
| 40 | SCHWARZ R, ISERMANN R, BÖHM J, et al. Modeling and control of an electromechanical disk brake[C]. SAE Paper 980600. |
| 41 | LI J, MENGCHUN W, HE R, et al. A design of electromechanical brake system triple-loop controllers using frequency domain method based on Bode plote[C]. Proceedings 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE). IEEE, 2011: 795-798. |
| 42 | KI Y H, LEE K J, CHEON J S, et al. Design and implementation of a new clamping force estimator in electro-mechanical brake systems[J]. International Journal of Automotive Technology, 2013, 14(5): 739-745. |
| 43 | FOX J, ROBERTS R, BAIER-WELT, et al. Modeling and control of a single motor electronic wedge brake[J]. SAE Transactions, 2007: 321-331. |
| 44 | JO C, HWANG S, KIM H. Clamping-force control for electromechanical brake[J]. IEEE Transactions on Vehicular Technology, 2010, 59(7): 3205-3212. |
| 45 | LINE C, MANZIE C, GOOD M. Control of an electromechanical brake for automotive brake-by-wire systems with an adapted motion control architecture[J]. SAE Transactions, 2004: 1047-1056. |
| 46 | LINE C, MANZIE C, GOOD M C. Electromechanical brake modeling and control: from PI to MPC[J]. IEEE Transactions on Control Systems Technology, 2008, 16(3): 446-457. |
| 47 | LEE C F, LINE C M C. Explicit nonlinear MPC of an automotive electromechanical brake[J]. IFAC Proceedings Volumes, 2008, 41(2): 10758-10763. |
| 48 | LINDVAI-SOOS D, HORN M. Modelling, control & implementation of an electro-mechanic braking force actuator for HEV and EV[J]. IFAC Proceedings Volumes, 2013, 46(21): 620-625. |
| 49 | PARK G, CHOI S B. Clamping force control based on dynamic model estimation for electromechanical brakes[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2018, 232(14): 2000-2013. |
| 50 | PENG X, CHEN C, ZHANG J. Study of the sliding mode control of electromechanical brake systems[J]. Journal of Hunan University (Natural Sciences), 2010, 37(8): 35-39. |
| 51 | EUM S, CHOI J, PARK S S, et al. Robust clamping force control of an electro-mechanical brake system for application to commercial city buses[J]. Energies, 2017, 10(2): 220. |
| 52 | KRISHNAMURTHY P, LU W, KHORRAMI F, et al. Robust force control of an SRM-based electromechanical brake and experimental results[J]. IEEE Transactions on Control Systems Technology, 2009, 17(6): 1306-1317. |
| 53 | LEE C F, MANZIE C. Near-time-optimal tracking controller design for an automotive electromechanical brake[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2012, 226(4): 537-549. |
| 54 | LEE C F, MANZIE C. High-bandwidth clamp force control for an electromechanical brake[C]. SAE Paper 2012-01-1799. |
| 55 | LEE K, BROOKS JR F W. Hot spotting and judder phenomena in aluminum drum brakes[J]. J. Trib., 2003, 125(1): 44-51. |
| 56 | LEE C F, MANZIE C. Active brake judder attenuation using an electromechanical brake-by-wire system[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(6): 2964-2976. |
| 57 | BAE J H. Soft computing approach for sensorless control in brake-by-wire systems with electro-mechanical brake[D]. DGIST, 2017. |
| 58 | CHEN J, PATTON R J. Robust model-based fault diagnosis for dynamic systems[M]. Springer Science & Business Media, 2012. |
| 59 | ANZUREZ-MARIN J, CASTILLO-TOLEDO B. The fault diagnosis problem: sliding mode fuzzy dedicated observers approach[C]. 2006 IEEE International Conference on Fuzzy Systems. IEEE, 2006: 1322-1328. |
| 60 | HE R, LI J, HUANG C, et al. Fault detection approach to EMB sensors based on dedicated observers[C]. 2011 International Conference on Electric Information and Control Engineering. IEEE, 2011: 3266-3269. |
| 61 | HWANG W, HUH K, KIM M, et al. Sensor fault diagnosis for EMB using parity space approach[C]. SAE Paper 2012-01-1794. |
| 62 | HWANG W, HAN K, HUH K, et al. Model-based sensor fault detection algorithm design for Electro-Mechanical Brake[C]. 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC). IEEE, 2011: 962-967. |
| 63 | HWANG W, HAN K, HUH K. Fault detection and diagnosis of the electromechanical brake based on observer and parity space[J]. International Journal of Automotive Technology, 2012, 13(5): 845-851. |
| 64 | HWANG W, HUH K. Fault detection and estimation for electromechanical brake systems using parity space approach[J]. Journal of Dynamic Systems, Measurement, and Control, 2015, 137(1). |
| 65 | WANG D, ZHOU D H, JIN Y H, et al. Adaptive generic model control for a class of nonlinear time-varying processes with input time delay[J]. Journal of Process Control, 2004, 14(5): 517-531. |
| 66 | XU Y N, DENG W W. Research of multiple sensors adaptive fault-tolerant control based on TS fuzzy model for EMB system[J]. International Journal of Engineering and Technology, 2015, 7(1): 65. |
| 67 | 吴坚, 赵阳, 何睿. 基于支持向量机回归算法的电子机械制动传感器系统故障诊断[J].吉林大学学报(工学版),2013, 43(5): 1178-1183. |
| WU J, ZHAO Y, HE R. Fault detection and diagnosis of EMB sensor system based on SVR[J]. Journal of Jilin University(Engineering and Technology Edition) , 2013, 43(5): 1178-1183. | |
| 68 | WANG Y, XU Y, XU Y, et al. Research of sensor fault-tolerant control based on CSA-SVR algorithm for EMB actuator system[J]. International Journal of Modeling and Optimization, 2015, 5(2): 145. |
| 69 | YU Z J, XU Y N. Research of sensor fault detection and diagnosis for EMB system based on CSA-SVM model [J]. International Journal of Engineering and Technology, 2015, 7(4): 349. |
| 70 | DAUM F. Nonlinear filters: beyond the kalman filter[J]. IEEE Aerospace and Electronic Systems Magazine, 2005, 20(8): 57-69. |
| 71 | LI C Y, XU Y N. Research of fault detection and diagnosis for EMB sensors system based on particle filter[J]. International Journal of Modeling and Optimization, 2014, 4(4): 342. |
| 72 | HUA Y, XU Y N. Study on sensor fault-tolerant control based on analytical reconstruction model for EMB System[C]. KUT International Conference for the 70th foundation Anniversary, 2018-09-21. |
| [1] | 熊璐,李聪聪,卓桂荣,程玉林,乔乐,王心坚. 电子机械制动器构型及控制技术发展现状[J]. 汽车工程, 2023, 45(12): 2187-2199. |
|