汽车工程 ›› 2023, Vol. 45 ›› Issue (12): 2187-2199.doi: 10.19562/j.chinasae.qcgc.2023.12.001
所属专题: 底盘&动力学&整车性能专题2023年
• • 下一篇
熊璐1,2,李聪聪1,2( ),卓桂荣1,2,程玉林1,2,乔乐1,2,王心坚1,2
),卓桂荣1,2,程玉林1,2,乔乐1,2,王心坚1,2
收稿日期:2023-05-31
修回日期:2023-06-18
出版日期:2023-12-25
发布日期:2023-12-21
通讯作者:
李聪聪
E-mail:2211106@tongji.edu.cn
基金资助:
Lu Xiong1,2,Congcong Li1,2(),Guirong Zhuo1,2,Yulin Cheng1,2,Le Qiao1,2,Xinjian Wang1,2
Received:2023-05-31
Revised:2023-06-18
Online:2023-12-25
Published:2023-12-21
Contact:
Congcong Li
E-mail:2211106@tongji.edu.cn
摘要:
电子机械制动(EMB)作为真正意义上的线控制动,具有系统结构精简、制动响应迅速等诸多优势。为了对EMB构型的研发现状进行全面梳理,本文在大量专利调研的基础上对各种构型的发展和产业化进程进行了总结,并对滚珠丝杠、楔式自增力、滚珠坡道和凸轮4种基本构型方案进行了分析和对比。针对执行器非线性特性和慢时变参数摄动下的控制难题,本文首先对各种执行器建模方法进行了整理,然后以有无压力传感器为分类依据,从基于夹紧力反馈值的控制和基于夹紧力估计值的控制两大层面分别对国内外的研究进展进行综述。最后,提出了对于执行器构型设计、夹紧力控制以及整车协调冗余控制的发展展望。
熊璐,李聪聪,卓桂荣,程玉林,乔乐,王心坚. 电子机械制动器构型及控制技术发展现状[J]. 汽车工程, 2023, 45(12): 2187-2199.
Lu Xiong,Congcong Li,Guirong Zhuo,Yulin Cheng,Le Qiao,Xinjian Wang. Review on Electro-Mechanical Brake Structure and Control Technology[J]. Automotive Engineering, 2023, 45(12): 2187-2199.
表1
调研专利分布情况"
| 供应商 | 国家 | 专利申请年份 | 专利总数 |
|---|---|---|---|
| Bosch | 德国 | 1996-2019 | 48 |
| Siemens | 德国 | 1996-2007 | 18 |
| Continental | 德国 | 1994-2020 | 15 |
| Delphi | 美国 | 1999-2005 | 15 |
| Hyundai | 韩国 | 2006-2020 | 40 |
| Mando | 韩国 | 2009-2021 | 33 |
| 国内 | 2018-2022 | 28 | |
| 总计 | 1994-2022 | 197 |
表2
国外各供应商EMB典型结构方案"
| 供应商 | EMB结构方案 | |
|---|---|---|
| 运动转换机构 | 减速增力机构 | |
| Bosch | 滚珠丝杠传动 | 行星轮系 |
| 齿轮齿条传动 | 双楔形面 | |
| 滚珠坡道传动 | 直齿齿轮系 | |
| 凸轮传动 | ||
| Siemens | 无/螺旋传动 | 多楔形面 |
| 滑动丝杠传动 | 杠杆机构 | |
| 滑动丝杠传动 | 压电元件 | |
| Continental | 滚珠丝杠传动 | 直齿齿轮/行星轮系 |
| 螺旋传动 | 双楔形面 | |
| Delphi | 环形滚珠丝杠传动 | 行星轮系 |
| 滚珠丝杠+凸轮传动 | 同步带轮+行星轮系 | |
| Hyundai | 滑动丝杠传动 | 行星轮系/蜗轮蜗杆 |
| 螺旋传动 | 多楔形面 | |
| 滚珠坡道传动 | ||
| Mando | 滚珠丝杠传动 | 斜齿轮/组合齿轮系 |
| 凸轮传动 | 行星轮系 | |
| 滚珠坡道传动 | 组合齿轮系 | |
表3
国内各高校EMB典型结构方案"
| 高校 | EMB结构方案 | |
|---|---|---|
| 运动转换机构 | 减速增力机构 | |
| 同济大学、吉林大学、清华大学、重庆大学... | 滚珠丝杠传动 | 行星轮系 |
| 南京理工大学 | 滚珠丝杠传动 | 锥齿轮+行星轮系 |
| 同济大学、浙江大学 | 滚珠丝杠传动 | 蜗轮蜗杆 |
| 华南理工大学 | 滚珠丝杠传动 | 单楔形面 |
| 沈阳理工大学 | 滚珠丝杠传动 | 多楔形面 |
| 江苏大学 | 凸轮传动 | 锥齿轮 |
图1
滚珠丝杠式EMB典型构型[18](Continental_2002)"
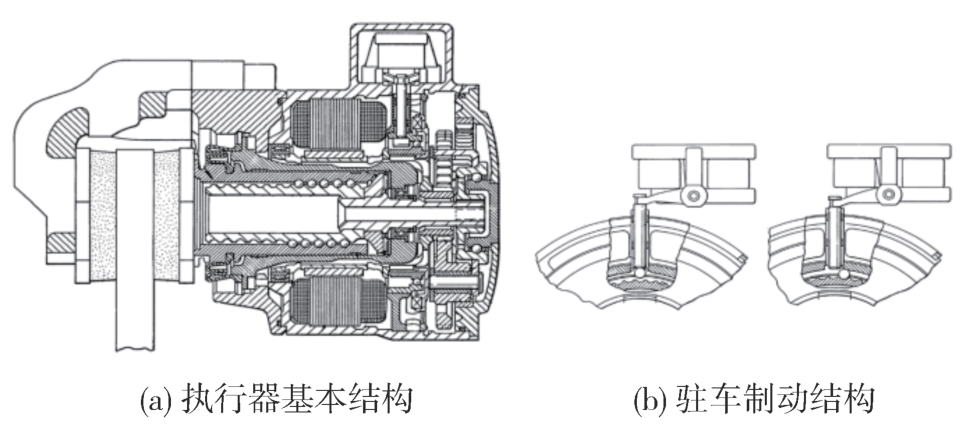
图2
楔式自增力式EMB典型构型[19](Siemens_2007)"
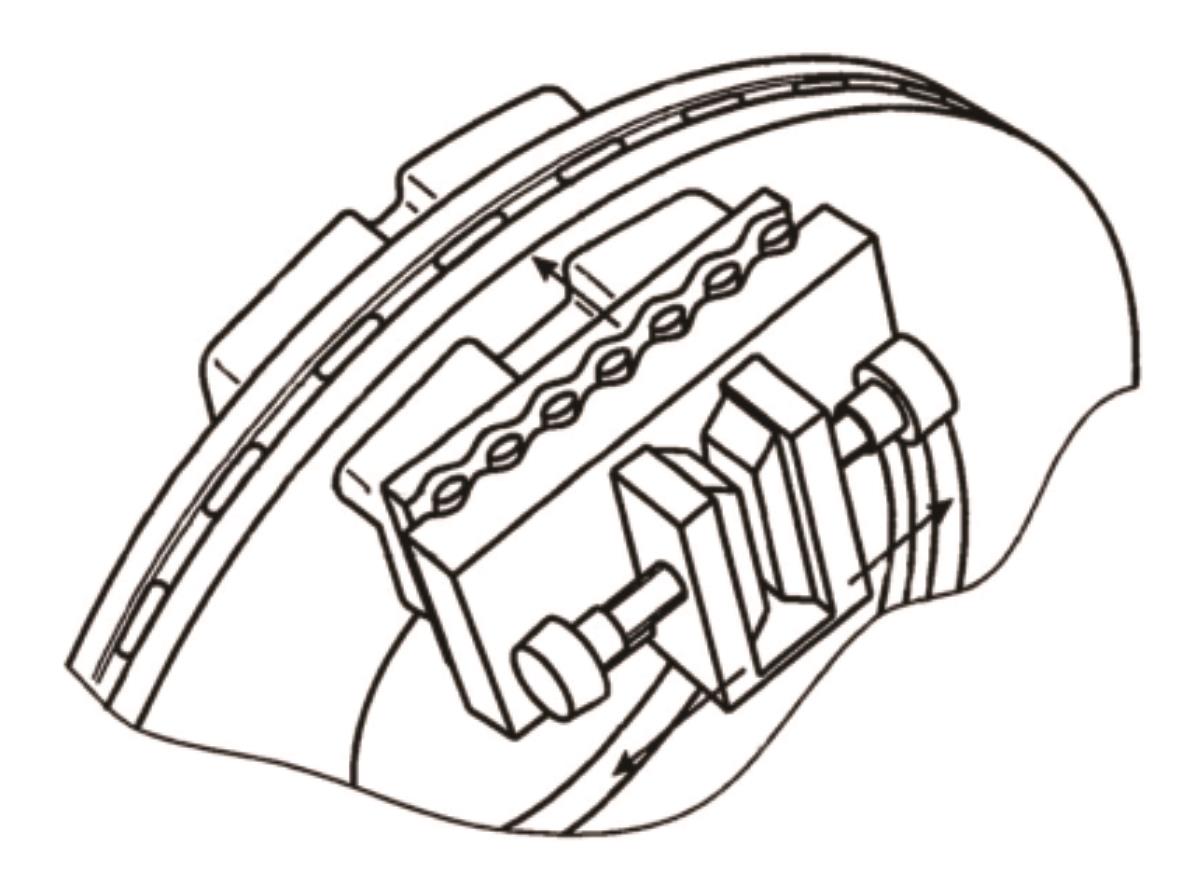
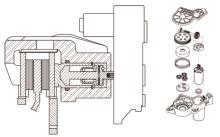
图3
滚珠坡道式EMB典型构型[15](Mando_2019)"
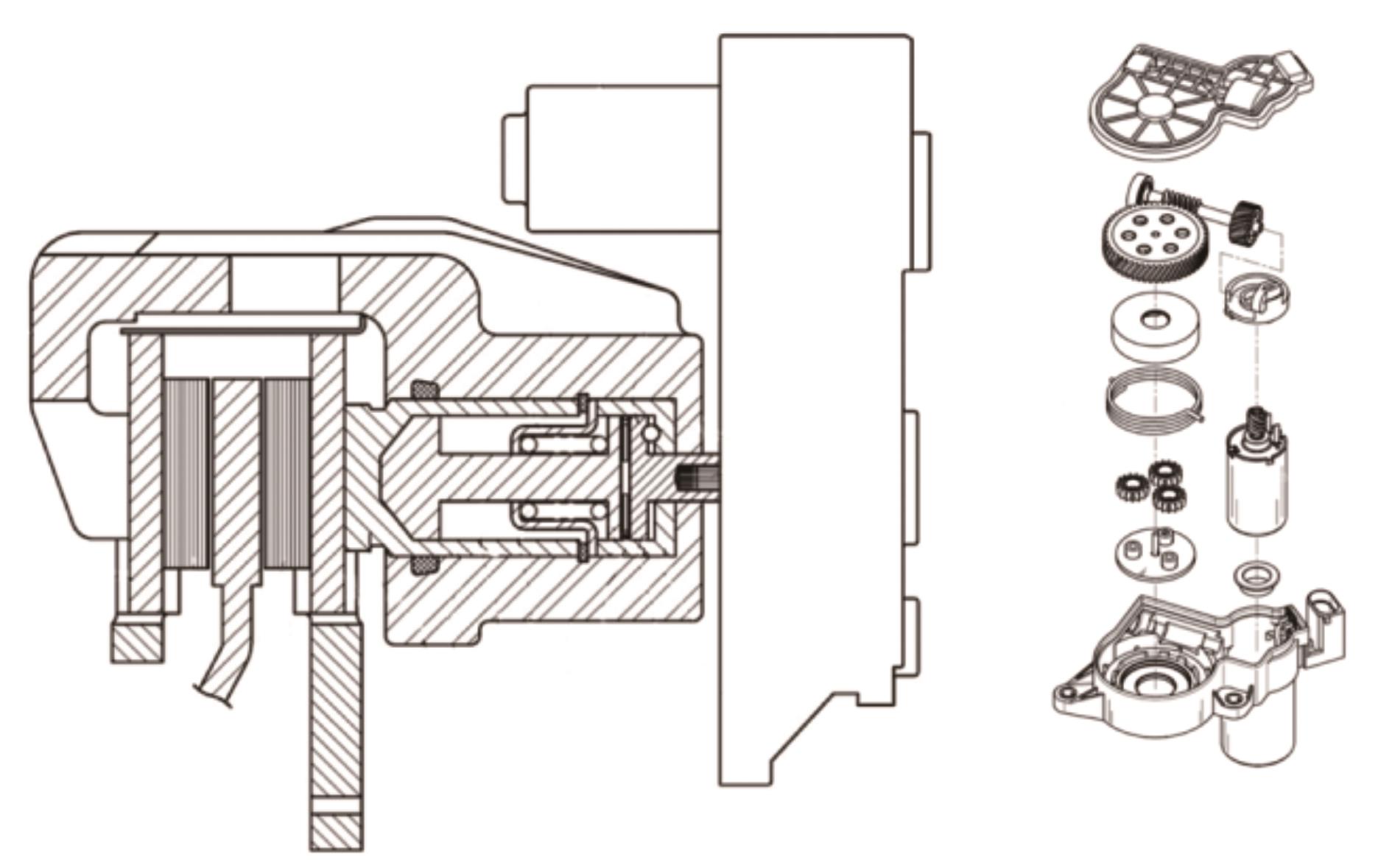
图4
凸轮式EMB典型构型[16](Mando_2021)"
表4
EMB基本构型的典型方案对比"
| 方案名称 | 滚珠丝杠式 | 楔式自增力式 | 滚珠坡道式 | 凸轮式 |
|---|---|---|---|---|
| 驱动装置 | 中空式电机 | 线性驱动单元 | 一体式电机 | 一体式电机 |
| 驱动装置 布置形式 | 同轴布置 | 垂直布置 | 平行布置 | 垂直布置 |
| 减速增力机构 | 行星轮系 | 多楔形面 | 斜齿轮+蜗轮蜗杆+行星轮系 | 直齿齿轮+行星轮系 |
| 运动转换机构 | 滚珠丝杠 | 无 | 滚珠坡道 | 凸轮 |
| 驻车制动机构 | 电磁阀+挺杆+滚子-凹槽 | 无 | 无 | 电磁阀+挺杆+旋转销-棘齿 |
| 优点 | 减速比较大,传动效率高,运动平稳 | 驱动功率需求小,执行器体积小 | 无需电机反转实现制动释放,减少电机运行转数 | 容易实现制动磨损补偿功能 |
| 缺点 | 承载能力相对较差,存在卡死问题 | 夹紧力控制难度较大 | 拖滞力矩可能较大,系统的可靠性也较差 | 易于磨损,受加工精度影响较大 |
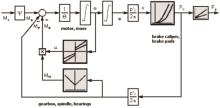
图5
集中参数半卡钳仿真模型[21]"
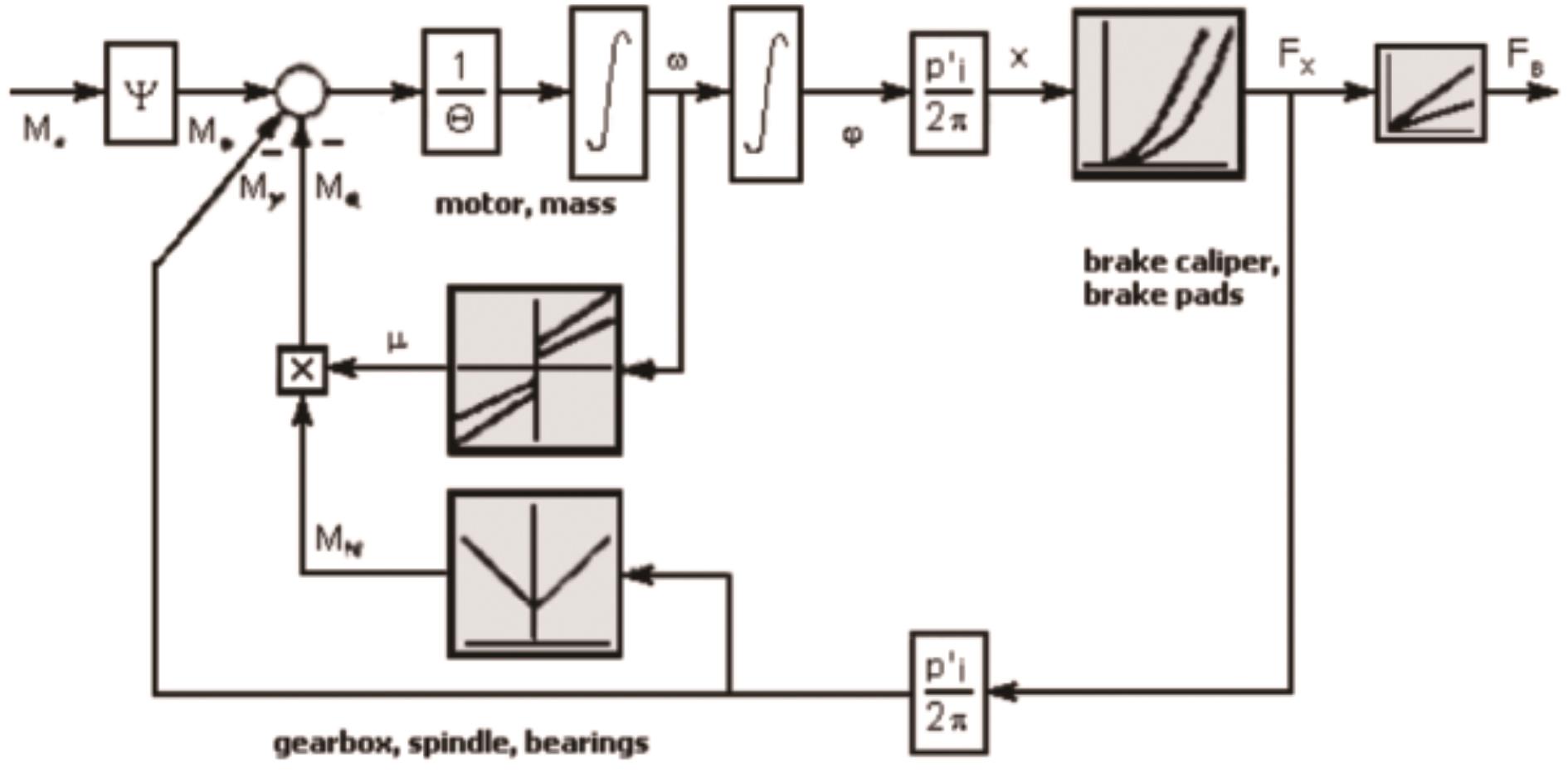
图6
基于夹紧力反馈值的控制系统基本架构"
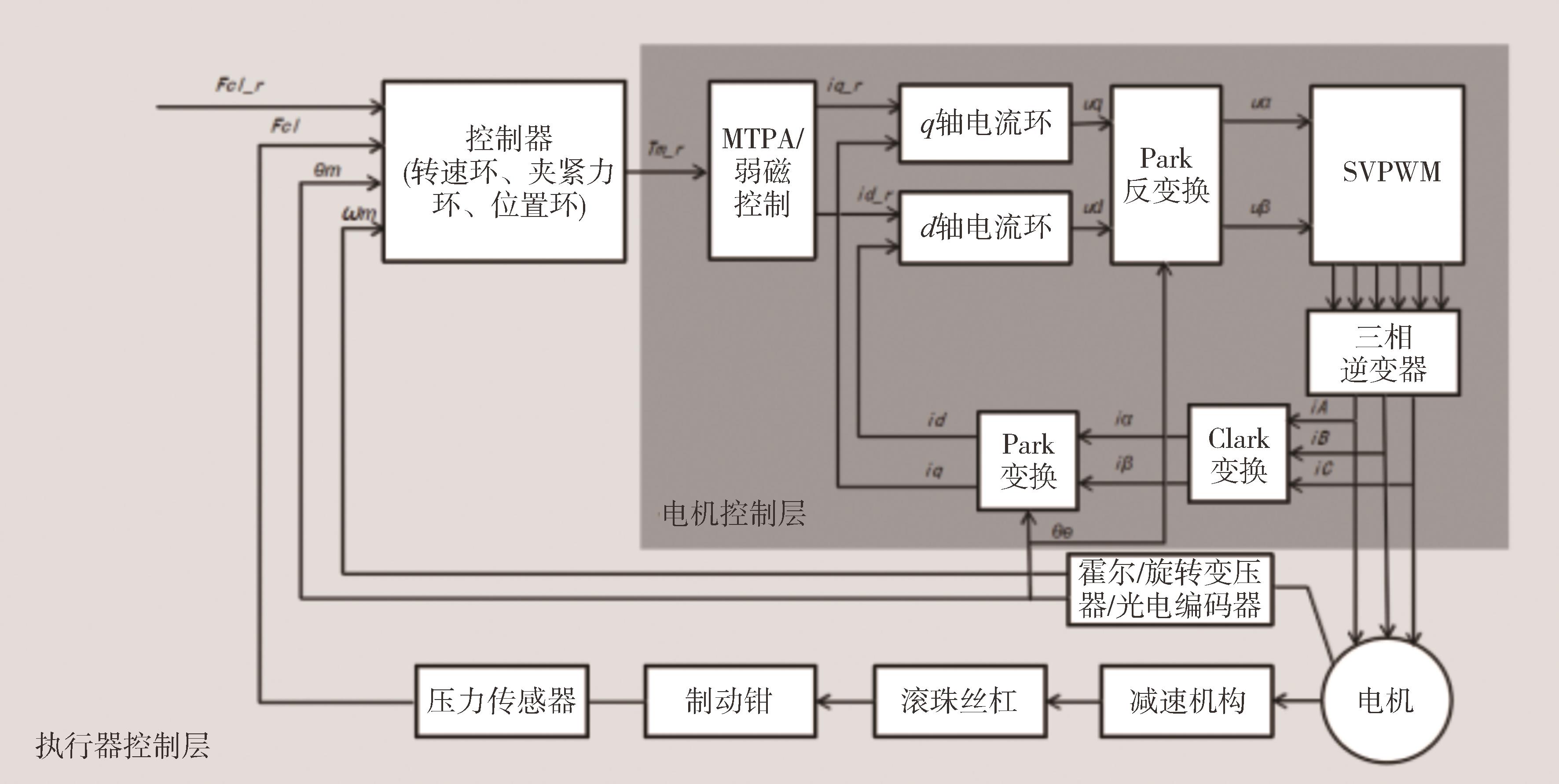
表5
基于夹紧力反馈值的控制算法"
控制 算法 | 优、缺点 | 分类 | 文献 |
|---|---|---|---|
PID 控制 | 优点:结构简单,便于执行层的算法开发和应用 缺点:参数依赖性高且整定困难,对时变非线性问题具有一定局限性 | 级联PID控制 (三闭环/双闭环) | [ |
| 复合式级联PID控制 | [ | ||
| 摩擦补偿PID控制 | [ | ||
增益调度PID控制 (自适应PID控制) | [ | ||
| 反馈线性化PID控制 | [ | ||
| 模糊PID控制 | [ | ||
| 摩擦补偿+增益调度+反馈线性化PID控制 | [ | ||
鲁棒 控制 | 优点:抗干扰性和容错性好,稳定性高 缺点:控制偏于保守,设计和调试困难 | 反步设计法+非线性 鲁棒控制 | [ |
| 快速终端滑模控制 | [ | ||
线性鲁棒H∞ 最优控制 | [ | ||
模型 预测 控制 | 优点:动态控制性能较好,可以显式处理约束问题 缺点:模型依赖度高,计算量大且实时性差 | 线性无约束 自适应MPC控制 | [ |
显式非线性 自适应MPC控制 | [ | ||
其他 算法 | 逆动力学模型控制 | [ | |
| 准时间最优控制 | [ | ||
| 缘脑系统控制 | [ |

图7
三闭环级联PID控制基本结构"
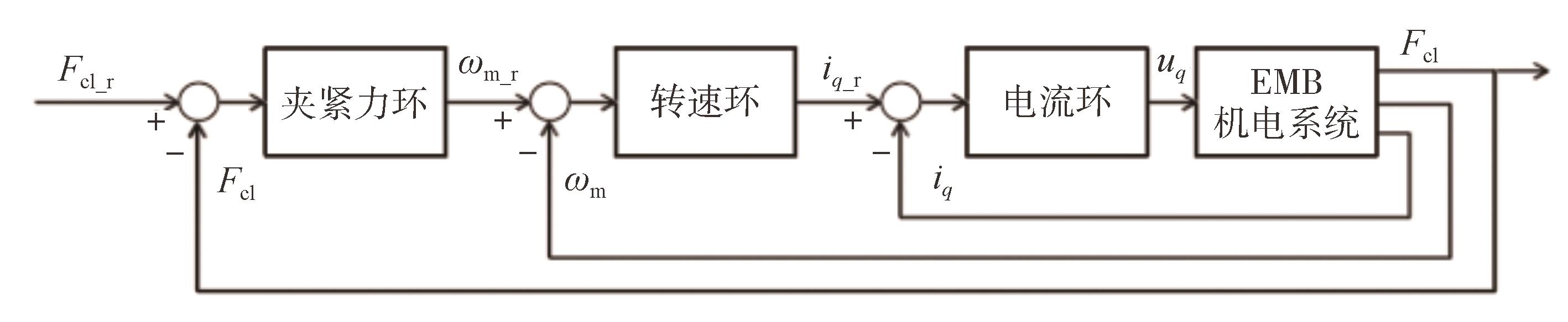
图8
复合式级联PID控制基本结构"
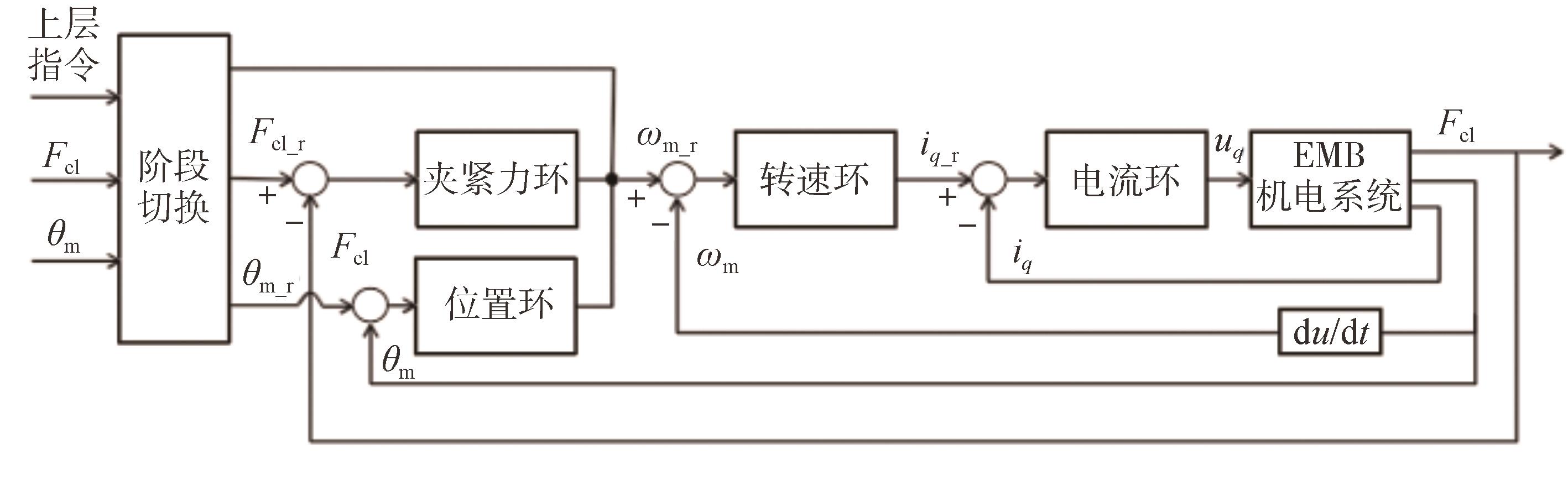
图9
级联PID控制的改进结构"
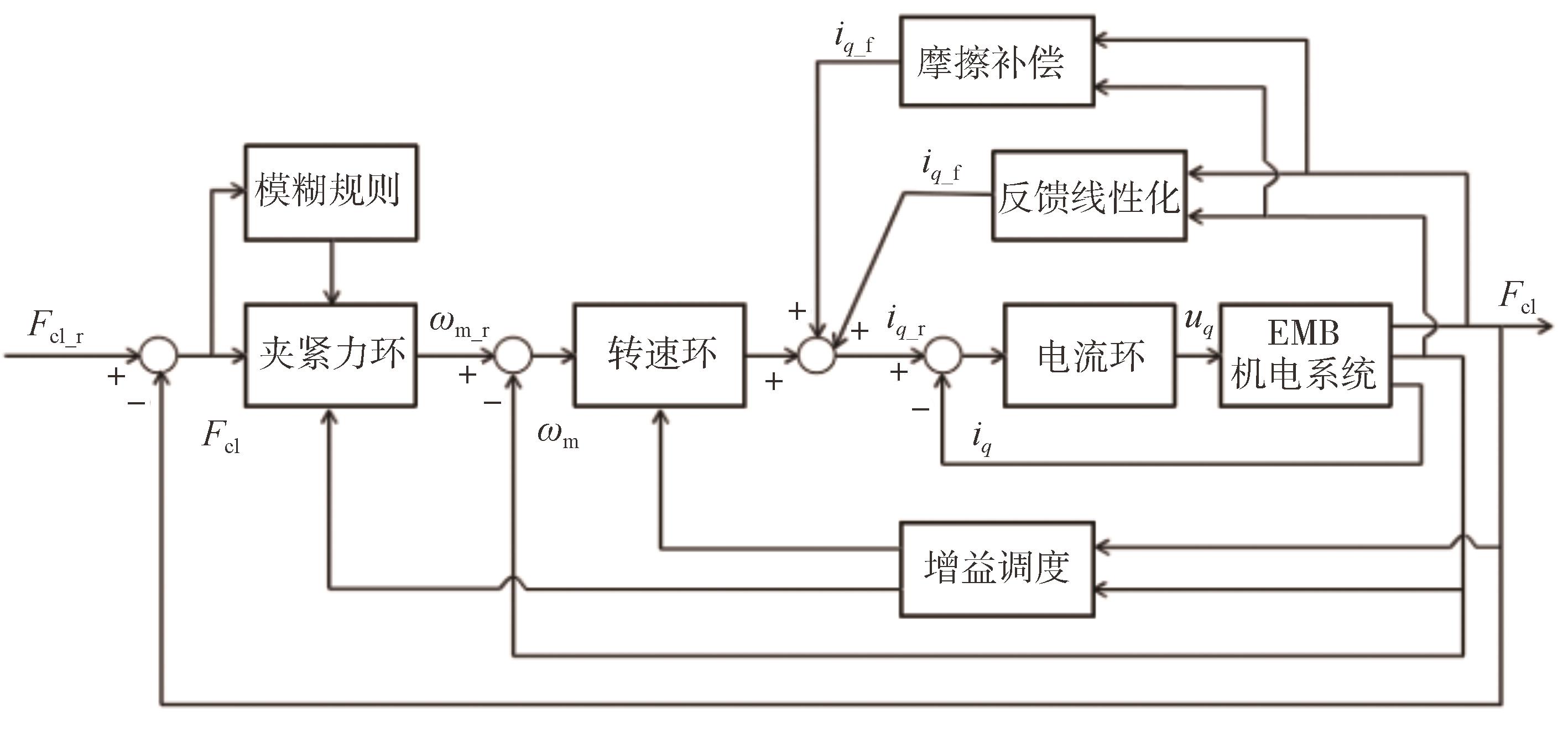

图10
EMB压力传感器的布置方式"
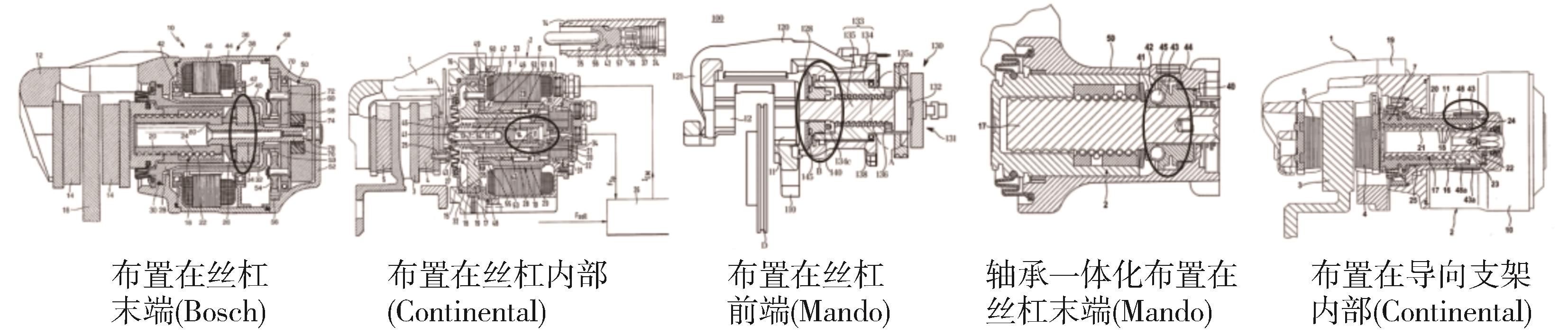
表6
夹紧力估计算法"
| 估计方法 | 优、缺点 | 分类 | 文献 |
|---|---|---|---|
刚度特性法 (输入信号:角位移) | 优点:只需要角位移信号,动态稳定性较好 缺点:需要准确识别接触点,受衬垫磨损/温度等因素干扰 | 平均刚度特性 | [ |
| 动态刚度特性 | [ | ||
| 滞回效应修正刚度特性 | [ | ||
| 热效应修正刚度特性 | [ | ||
力矩平衡法 (输入信号:电流,角速度) | 优点:鲁棒性较好 缺点:信号噪声干扰大,模型参数辨识困难, 受传动件磨损/温度等因素干扰 | 摩擦抵消的力矩平衡 | [ |
| 简化摩擦模型力矩平衡 | [ | ||
状态观测器法 (输入信号:电流,角位移) | 优点:适应性广 缺点:受传感器噪声干扰,仍须准确辨识摩擦 | 扰动观测器 | [ |
| 龙伯格观测器 | [ | ||
| 超螺旋观测器 | [ | ||
融合方法 (输入信号:电流,角速度,角位移) | 优点:准确性和鲁棒性好 缺点:须根据工况设计合适的融合算法 | 线性比例融合 | [ |
| 最大似然估计融合 | [ | ||
| 卡尔曼滤波融合 | [ | ||
| 遗传算法+卡尔曼滤波融合 | [ |
图11
不同垫块磨损程度、温度影响下的夹紧力-电机角位移(刚度特性)曲线[22]"
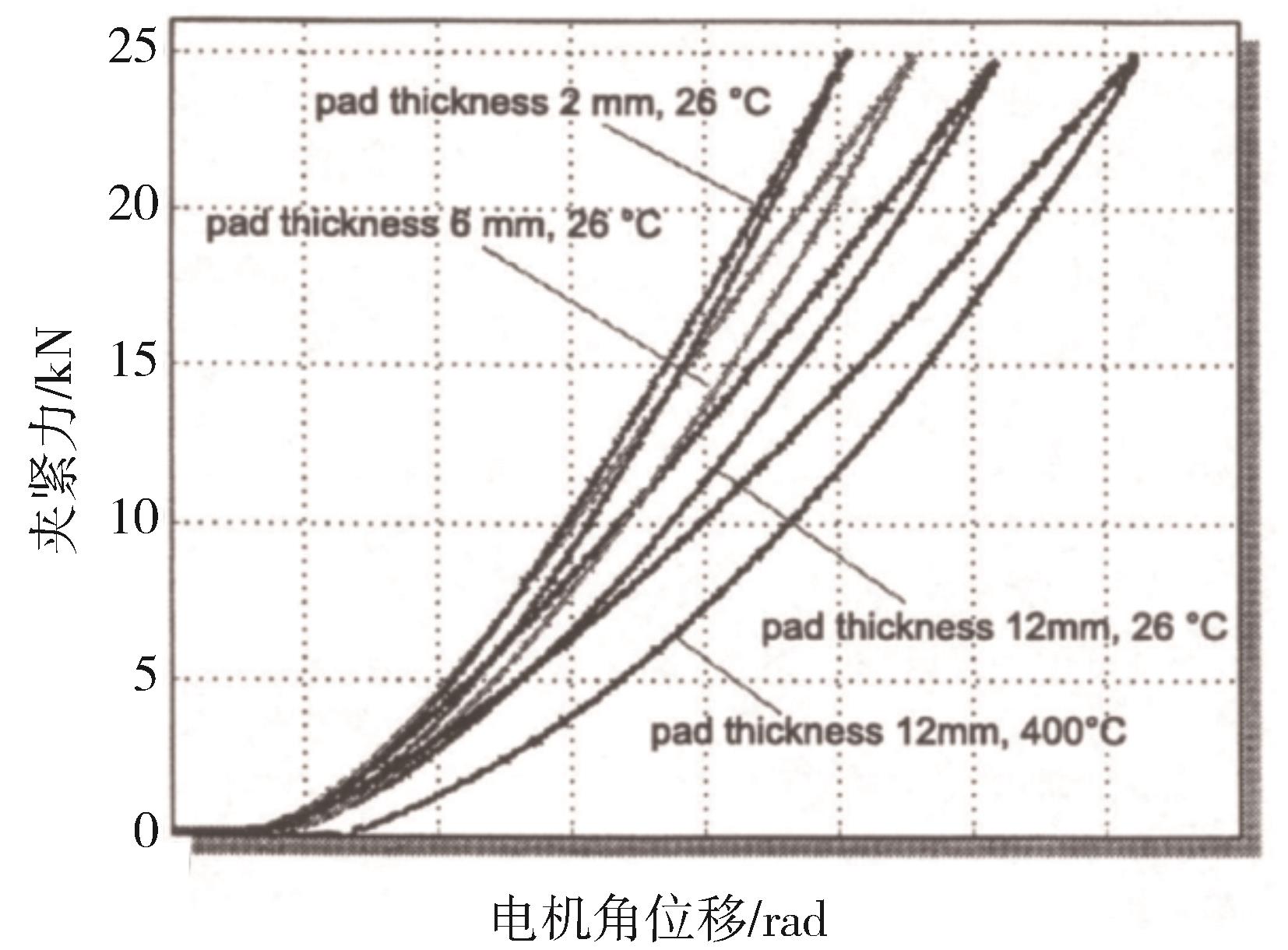
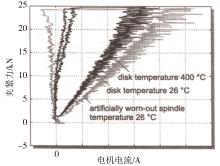
图12
不同丝杠磨损程度、温度影响下的夹紧力-电机电流曲线[22]"
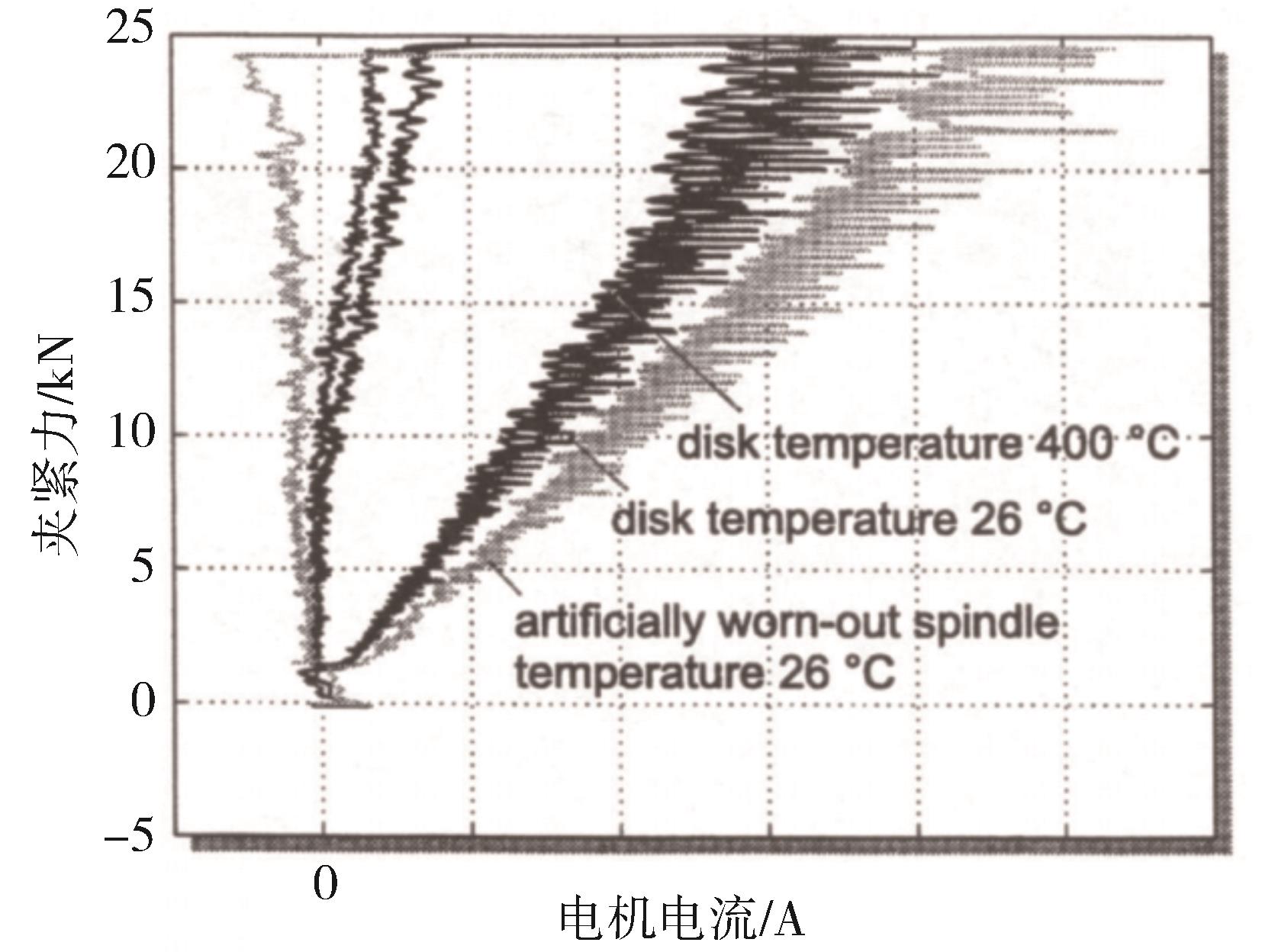
图13
无压力传感器力伺服控制典型结构"
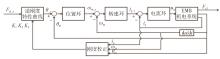
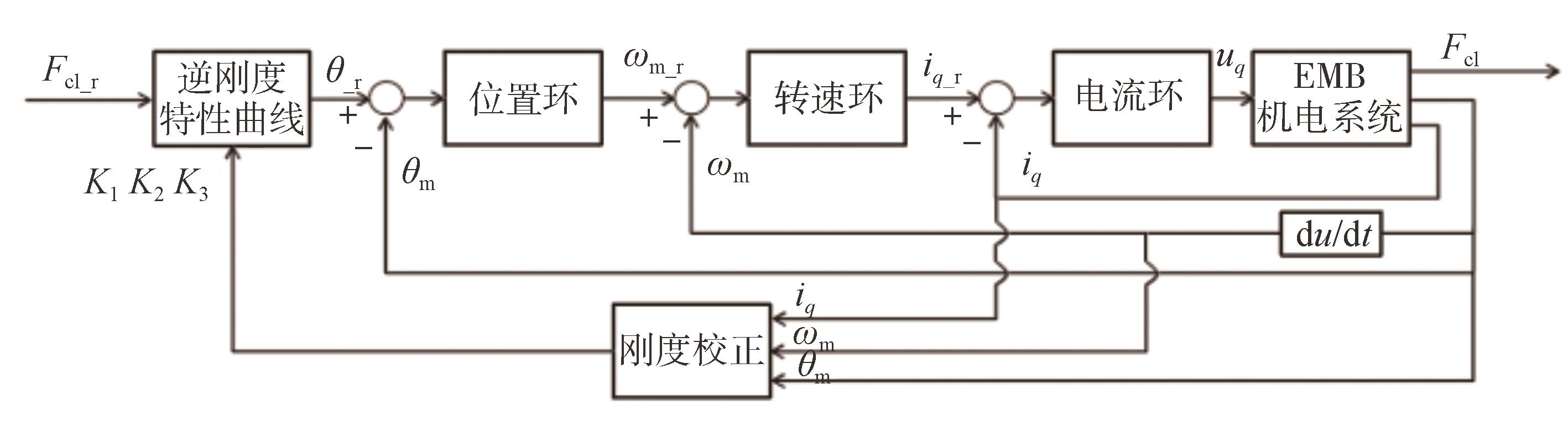
图14
无压力传感器位置伺服控制典型结构"
| 1 | 熊璐, 余卓平, 张立军. 汽车电制动系统(BBW)现状和前景[J]. 上海汽车, 2002(6): 1-4. |
| XIONG L, YU Z, ZHANG L. Present situation and prospect of automotive electric braking system (BBW)[J]. Shanghai Auto, 2002(6): 1-4. | |
| 2 | WAKNIN D, SURCEL M. Electromechanical braking systems review[R]. PIT Group, 2020. |
| 3 | 张猛, 宋健. 电子机械制动系统发展现状[J]. 机械科学与技术, 2005, 24(2): 208-211. |
| ZHANG M, SONG J. A review of electromechanical brake (EMB) system[J]. Mechanical Science and Technology for Aerospace Engineering, 2005, 24(2): 208-211. | |
| 4 | 宗长富, 李刚, 郑宏宇, 等. 线控汽车底盘控制技术研究进展及展望[J]. 中国公路学报, 2013, 26(2): 160-176. |
| ZONG C, LI G, ZHENG H, et al. Study progress and outlook of chassis control technology for X-by-wire automobile[J]. China Journal of Highway and Transport, 2013, 26(2): 160-176. | |
| 5 | BERNWARD B, VOLKER H, ENNO K, et al. Actuation unit for an electromechanically operated disk brake: US 2006102438A1[P]. 2006-05-18. |
| 6 | GEORG H, PAUL L, BERNHARD S, et al. Actuator unit for an electromechanically actuatable disk brake: WO 2004083670A1[P]. 2004-09-30. |
| 7 | JUERGEN H. Electromechanical wheel brake device: US 6938735B1[P]. 2005-09-06. |
| 8 | CHI-THUAN C, DIRK H, HERBERT V, et al. Self-boosting electromechanical friction brake: EP 2057385A1[P]. 2009-05-13. |
| 9 | MARTIN S. Electromechanical brake for vehicle has stack of elements to maintain stable stress in component being braked: DE 102006000763B3[P]. 2007-04-12. |
| 10 | XAVIER D, JACQUES L. Caliper of an electromechanical disc brake: EP 1746301A1[P]. 2007-01-24. |
| 11 | SIM D G, SHIN C S. Electro mechanical brake device: KR 20170070894A[P]. 2017-06-23. |
| 12 | KIM J S. Electro wedge brake device for vehicle: KR 20110114901A[P]. 2011-10-20. |
| 13 | JUNG H M. Electric brake apparatus of vehicle: KR 20210041821A[P]. 2021-04-16. |
| 14 | KYUNGHO J, GUNWOO K, JAE H J. Electro-mechanical brake system: KR, 20210005532A[P]. 2021-01-14. |
| 15 | JAE J H. Actuator and electro-mechanical brake: KR 20200094377A[P]. 2020-08-07. |
| 16 | JOON K S, WOOCHUL L, JUNG D. Electro-mechanical brake: KR 102401769B1[P]. 2022-05-25. |
| 17 | LI C, ZHUO G, TANG C, et al. A review of electro-mechanical brake (EMB) system: structure, control and application[J]. Sustainability, 2023, 15(5): 4514. |
| 18 | MARON C, GEORG R. Method for actuating an electromechanical parking brake device: US 2006131113A1[P]. 2006-06-22. |
| 19 | MICHAEL H. Bremseinrichtung mit einem Keilmechanismus: DE 102007013421A1[P]. 2008-09-25. |
| 20 | LEE C F. Brake force control and judder compensation of an automotive electromechanical brake[D]. University of Melbourne, Department of Mechanical Engineering, 2013. |
| 21 | MARON C, DIECKMANN T, HAUCK S, et al. Electromechanical brake system: actuator control development system[C].SAE International Congress & Exposition, 1997. DOI: 10.4271/970814. |
| 22 | SCHWARZ R, ISERMANN R, BÖHM J, et al. Clamping force estimation for a brake-by-wire actuator[C].International Congress & Exposition, 1999. DOI: 10.4271/1999-01-0482. |
| 23 | LÜDEMANN J. Heterogeneous and hybrid control with application in automotive systems[M]. University of Glasgow (United Kingdom), 2002. |
| 24 | JO C, HWANG S, KIM H. Clamping-force control for electromechanical brake[J]. IEEE Transactions on Vehicular Technology, 2010, 59(7): 3205-3212. |
| 25 | LI Y, SHIM T, SHIN D H, et al. Control system design for electromechanical brake system using novel clamping force model and estimator[J]. IEEE Transactions on Vehicular Technology, 2021, 70(9): 8653-8668. |
| 26 | KWAK J, YAO B, BAJAJ A. Analytical model development and model reduction for electromechanical brake system[C].ASME International Mechanical Engineering Congress and Exposition, 2004, 47063: 297-306. |
| 27 | 牟希东. 面向动力学控制的电子机械制动系统控制策略研究[D]. 长春: 吉林大学, 2021. |
| MOU X. Research on control strategy of electromechanical brake system for dynamic control[D]. Changchun: Jilin University, 2021. | |
| 28 | 王赛. 汽车电子机械制动 (EMB) 系统设计及稳定性分析[D]. 淮南: 安徽理工大学, 2017. |
| WANG S. Design and stability analysis of automotive electromechanical brake (EMB) system[D]. Huainan: Anhui University of Science and Technology, 2017. | |
| 29 | SCHWARZ R, ISERMANN R, BÖHM J, et al. Modeling and control of an electromechanical disk brake[C].International Congress & Exposition, 1998. DOI: 10.4271/980600. |
| 30 | 唐亮. 轻型汽车电子机械制动系统的控制策略与算法研究[D]. 长春: 吉林大学, 2008. |
| TANG L. Research on control strategy and algorithm of electromechanical brake system of light vehicle[D]. Changchun: Jilin University, 2008. | |
| 31 | 杨坤. 轻型汽车电子机械制动及稳定性控制系统研究[D]. 长春: 吉林大学, 2009. |
| YANG K. Research on electromechanical braking and stability control system of light vehicle[D]. Changchun: Jilin University, 2009. | |
| 32 | LI J, MENGCHUN W, HE R, et al. A design of electromechanical brake system triple-loop controllers using frequency domain method based on Bode plote[C]. Proceedings 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE). IEEE, 2011: 795-798. |
| 33 | 李灿华. 基于 EMB 的汽车制动控制研究[D]. 重庆: 重庆大学, 2015. |
| LI C. Research on automobile brake control based on EMB[D]. Chongqing: Chongqing University, 2015. | |
| 34 | 王俊鼎. 电子机械制动控制系统的研究[D]. 杭州: 浙江大学, 2016. |
| WANG J. Research on electromechanical brake control system[D]. Hangzhou: Zhejiang University, 2016. | |
| 35 | 张苏彬. EMB执行器方案设计评价与控制策略研究[D]. 上海: 同济大学, 2017. |
| ZHANG S. Design evaluation and control strategy research of EMB actuator scheme[D]. Shanghai: Tongji University, 2017. | |
| 36 | 张帅. 电子机械制动 (EMB) 控制策略研究[D]. 西安: 长安大学, 2021. |
| ZHANG S. Research on control strategy of electromechanical brake (EMB)[D]. Xi’an: Changan University, 2021. | |
| 37 | KI Y H, LEE K J, CHEON J S, et al. Design and implementation of a new clamping force estimator in electro-mechanical brake systems[J]. International Journal of Automotive Technology, 2013, 14: 739-745. |
| 38 | 张建. 电子机械制动执行器精细控制算法研究[D]. 长春: 吉林大学, 2011. |
| ZHANG J. Research on fine control algorithm of electromechanical brake actuator[D]. Changchun: Jilin University, 2011. | |
| 39 | 贾明菲. 汽车线控制动执行器控制策略研究[D]. 长沙: 湖南大学, 2018. |
| JIA M. Research on control strategy of automobile brake-by-wire actuator[D]. Changsha: Hunan University, 2018. | |
| 40 | LINE C, MANZIE C, GOOD M. Control of an electromechanical brake for automotive brake-by-wire systems with an adapted motion control architecture[C].SAE Automotive Dynamics, Stability & Controls Conference & Exhibition, 2004. DOI: 10.4271/2004-01-2050. |
| 41 | LINE C, MANZIE C, GOOD M. Electromechanical brake control: limitations of, and improvements to, a cascaded PI control architecture[J]. Mechatronics, 2006. |
| 42 | 张睿. EMB夹紧力控制策略研究及实验平台的开发[D]. 长沙: 湖南大学, 2018. |
| ZHANG R. EMB clamping force control strategy research and experimental platform development[D]. Changsha: Hunan University, 2018. | |
| 43 | LINE C L J. Modelling and control of an automotive electromechanical brake[M]. University of Melbourne, Department of Mechanical and Manufacturing Engineering, 2007. |
| 44 | KRISHNAMURTHY P, LU W, KHORRAMI F, et al. A robust force controller for an SRM based electromechanical brake system[C].Proceedings of the 44th IEEE Conference on Decision and Control. IEEE, 2005: 2006-2011. |
| 45 | KRISHNAMURTHY P, LU W, KHORRAMI F, et al. Robust force control of an SRM-based electromechanical brake and experimental results[J]. IEEE Transactions on Control Systems Technology, 2009, 17(6): 1306-1317. |
| 46 | MA R, ZHANG H, YUAN M, et al. Chattering suppression fast terminal sliding mode control for aircraft EMA braking system[J]. IEEE Transactions on Transportation Electrification, 2021, 7(3): 1901-1914. |
| 47 | LINE C, MANZIE C, GOOD M. Robust control of an automotive electromechanical brake[J]. IFAC Proceedings Volumes, 2007, 40(10): 579-586. |
| 48 | LINE C, MANZIE C, GOOD M C. Electromechanical brake modeling and control: from PI to MPC[J]. IEEE Transactions on Control Systems Technology, 2008, 16(3): 446-457. |
| 49 | LEE C F, LINE C M C. Explicit nonlinear MPC of an automotive electromechanical brake[J]. IFAC Proceedings Volumes, 2008, 41(2): 10758-10763. |
| 50 | HOLWEG E G M, KLOMP R L, KLAASSENS J B, et al. Modeling and inverse model-based control of an electro-mechanical brake actuator[J]. IFAC Proceedings Volumes, 2000, 33(26): 39-44. |
| 51 | LEE C F. Brake force control and judder compensation of an automotive electromechanical brake[D]. University of Melbourne, Department of Mechanical Engineering, 2013. |
| 52 | KIM C, KIM Y, KWON O, et al. An application of the brain limbic system–based control to the electromechanical brake system[J]. Advances in Mechanical Engineering, 2018, 10(2): 1687814018755215. |
| 53 | KWAK J. Modeling and control of an electromechanical brake (brake-by-wire) system[D]. Purdue University, 2005. |
| 54 | SARIC S, BAB-HADIASHAR A, HOSEINNEZHAD R. Clamp-force estimation for a brake-by-wire system: a sensor-fusion approach[J]. IEEE Transactions on Vehicular Technology, 2008, 57(2): 778-786. |
| 55 | HOSEINNEZHAD R, SARIC S, BAB-HADIASHAR A. Estimation of clamp force in brake-by-wire systems: a step-by-step identification approach[C]. SAE Paper 2006-01-1154. |
| 56 | PARK G, CHOI S, HYUN D. Clamping force estimation based on hysteresis modeling for electro-mechanical brakes[J]. International Journal of Automotive Technology, 2017, 18: 883-890. |
| 57 | SARIC S, BAB-HADIASHAR A, VAN DER WALT J. Estimating clamp force for brake-by-wire systems: thermal considerations[J]. Mechatronics, 2009, 19(6): 886-895. |
| 58 | PARK G, CHOI S B. Clamping force control based on dynamic model estimation for electromechanical brakes[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2018, 232(14): 2000-2013. |
| 59 | BAE J, EUM S, LEE S. Hybrid genetic algorithm and kalman filter approach to estimate the clamping force of electro-mechanical brake[J]. International Research Journal of Electronics and Computer Engineering, 2017, 3(4): 5-10. |
| 60 | SARIC S, BAB-HADIASHAR A. A Kalman filtering approach to estimate clamp force in brake-by-wire systems[C].ICINCO-SPSMC, 2007: 249-255. |
| 61 | EUM S, CHOI J, PARK S S, et al. Robust clamping force control of an electro-mechanical brake system for application to commercial city buses[J]. Energies, 2017, 10(2): 220. |
| 62 | XU Z, GERADA C. Enhanced force estimation for electromechanical brake actuators in transportation vehicles[J]. IEEE Transactions on Power Electronics, 2021, 36(12): 14329-14339. |
| 63 | PARK G, CHOI S, HYUN D. Development of clamping force estimation algorithm and clamp-force sensor calibration on electromechanical brake systems[J]. Transactions of the Korean Society of Automotive Engineers, 2016, 24(3): 365-371. |
| 64 | KI Y H, OH I, JEON J, et al. A new type of clamping force estimator for electromechanical brake systems[C].ICCAS 2010. IEEE, 2010: 933-937. |
| 65 | 葛正, 王维锐, 王俊鼎. 电子机械制动器间隙调整控制策略研究[J]. 浙江大学学报 (工学版), 2017, 51(1): 138-144. |
| GE Z, WANG W, WANG J. Research on clearance adjustment control strategy of electromechanical brake[J]. Journal of Zhejiang University (Engineering Science), 2017, 51(1): 138-144. | |
| 66 | 刘志强, 陈玉锦, 陈林. 电子机械制动器的间隙调控方法[J]. 兵工学报, 2022, 43(7): 1478. |
| LIU Z, CHEN Y, CHEN L. Clearance control method of electromechanical brake[J]. Acta Armamentarii, 2022, 43(7): 1478. | |
| 67 | LI B, SONG D, XING H, et al. Force sensorless control for aircraft electromechanical brake system[C].2019 22nd International Conference on Electrical Machines and Systems (ICEMS). IEEE, 2019: 1-5. |
| 68 | 赵逸云,林辉,李兵强.电子机械制动系统无压力传感器控制策略研究[J/OL]. 北京航空航天大学学报. https://doi.org/10.13700/j.bh.1001-5965.2021.0748. |
| ZHAO Y, LIN H, LI B. Research on sensorless control strategy of electromechanical brake system[J/OL]. Journal of Beljing University of Aeronautics and Astronautics. https://doi.org/10.13700/j.bh.1001-5965.2021.0748. |
| [1] | 李学良,赵志福,杨树军,彭增雄. 双电机耦合驱动系统构型分层设计方法[J]. 汽车工程, 2023, 45(10): 1897-1907. |
| [2] | 张奇祥,靳立强,靳博豪,张伊晗,陈鹏飞,刘永腾,李建华. EMB夹紧力控制与传感器故障诊断研究进展[J]. 汽车工程, 2022, 44(5): 736-746. |
| [3] | 石琴,刘鑫,应贺烈,王铭伟,贺泽佳,贺林. 电液线控制动系统压力反步控制算法研究[J]. 汽车工程, 2022, 44(5): 747-755. |
| [4] | 初亮,常城,王旭,赵迪,许炎武. 面向高级自动驾驶的线控制动系统及压力控制算法研究[J]. 汽车工程, 2022, 44(3): 308-318. |
| [5] | 李军求,刘吉威,朱超峰. 基于时变底盘构型的混动车辆能量管理研究[J]. 汽车工程, 2022, 44(12): 1866-1876. |
| [6] | 邱明明,曹龙凯,黄康,张义雷,刘浩. 基于视觉识别的线控制动压力滑模控制[J]. 汽车工程, 2021, 43(1): 68-76. |
|