汽车工程 ›› 2022, Vol. 44 ›› Issue (9): 1339-1349.doi: 10.19562/j.chinasae.qcgc.2022.09.005
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
龙文民,鲁光泉( ),石茜,谭海天
),石茜,谭海天
收稿日期:2022-04-02
修回日期:2022-04-24
出版日期:2022-09-25
发布日期:2022-09-21
通讯作者:
鲁光泉
E-mail:lugq@buaa.edu.cn
基金资助:
Wenmin Long,Guangquan Lu(),Xi Shi,Haitian Tan
Received:2022-04-02
Revised:2022-04-24
Online:2022-09-25
Published:2022-09-21
Contact:
Guangquan Lu
E-mail:lugq@buaa.edu.cn
摘要:
为更合理地选取前向碰撞预警指标并针对不同驾驶人个性化地设置其预警阈值,提出了基于信号检测论与秩和比法的前向碰撞预警指标综合评价方法,实现了基于跟驰数据的驾驶人反应时间在线辨识与更新。开展自然驾驶实验采集城市交通环境下的驾驶行为数据,验证了驾驶人反应时间在线辨识的有效性。进一步通过统计分析辨识得到不同驾驶人的个性化预警指标阈值。对不同预警指标阈值结果的综合比较和分析表明:6种前向碰撞预警指标中安全裕度(SM)最优;风险感知系数(RP)次之;秩和比值按大小依次为距离碰撞时间倒数(TTCi)、车头时距(THW)和预警系数(W);时间裕度(TM)评价结果波动较大。
龙文民,鲁光泉,石茜,谭海天. 基于驾驶人跟驰特性的前撞预警指标与阈值确定方法[J]. 汽车工程, 2022, 44(9): 1339-1349.
Wenmin Long,Guangquan Lu,Xi Shi,Haitian Tan. Determination Method of Forward Collision Warning Indicator and Threshold Based on Drivers’ Car-Following Characteristics[J]. Automotive Engineering, 2022, 44(9): 1339-1349.

图1
跟驰场景中制动反应示意图"
表1
已有文献中常用FCWI"
| FCWI | 定义 | 固定参数 取值 |
|---|---|---|
| TTCi | ||
| THW | ||
| TM | ||
| W | ||
| RP | ||
| SM |
表2
FCW功能的判别矩阵"
| 项目 | 驾驶人决策 | ||
|---|---|---|---|
| 制动 | 不制动 | ||
| 事实 | 达到阈值(预警) | 正确预警 | 误报 |
| 未达到阈值(不预警) | 漏报 | 正确拒绝 | |
图2
个性化前向碰撞预警方法流程图"
图3
实验车辆及测试路线示意图"
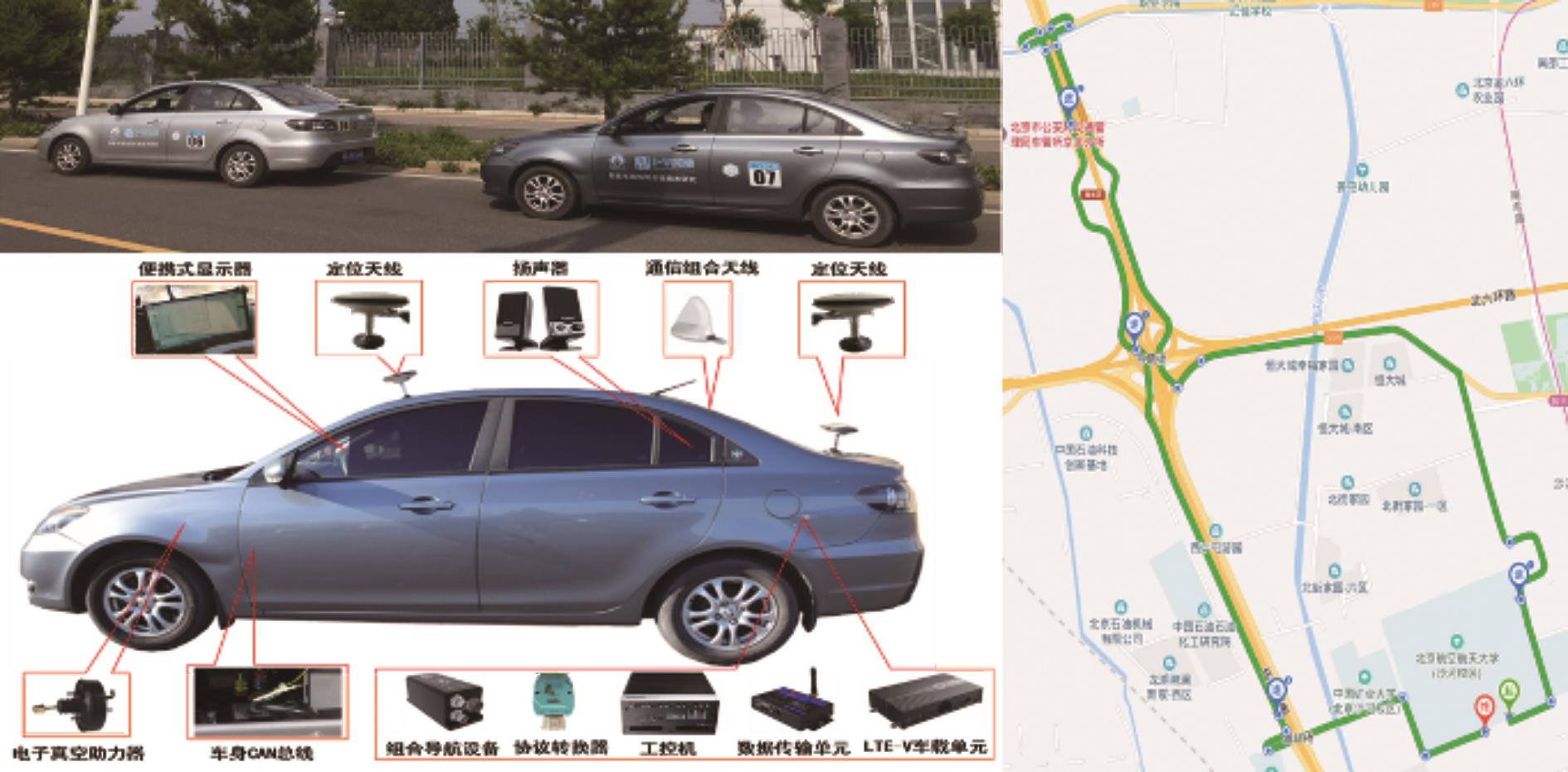
表3
自然驾驶实验基本信息"
| 编号 | 年龄 | 驾龄/年 | 行驶里程/ 万km | 跟驰 案例数 | 案例平均时长/s |
|---|---|---|---|---|---|
| 1 | 25 | 3 | 0.5-1 | 68 | 25 |
| 2 | 44 | 13 | >5 | 61 | 32 |
| 3 | 49 | 19 | >5 | 83 | 25 |
| 4 | 39 | 17 | >5 | 41 | 27 |
| 5 | 41 | 20 | 3-5 | 82 | 23 |
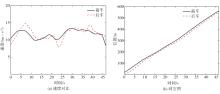
图4
案例A概述"
图5
案例A反应时间辨识结果"
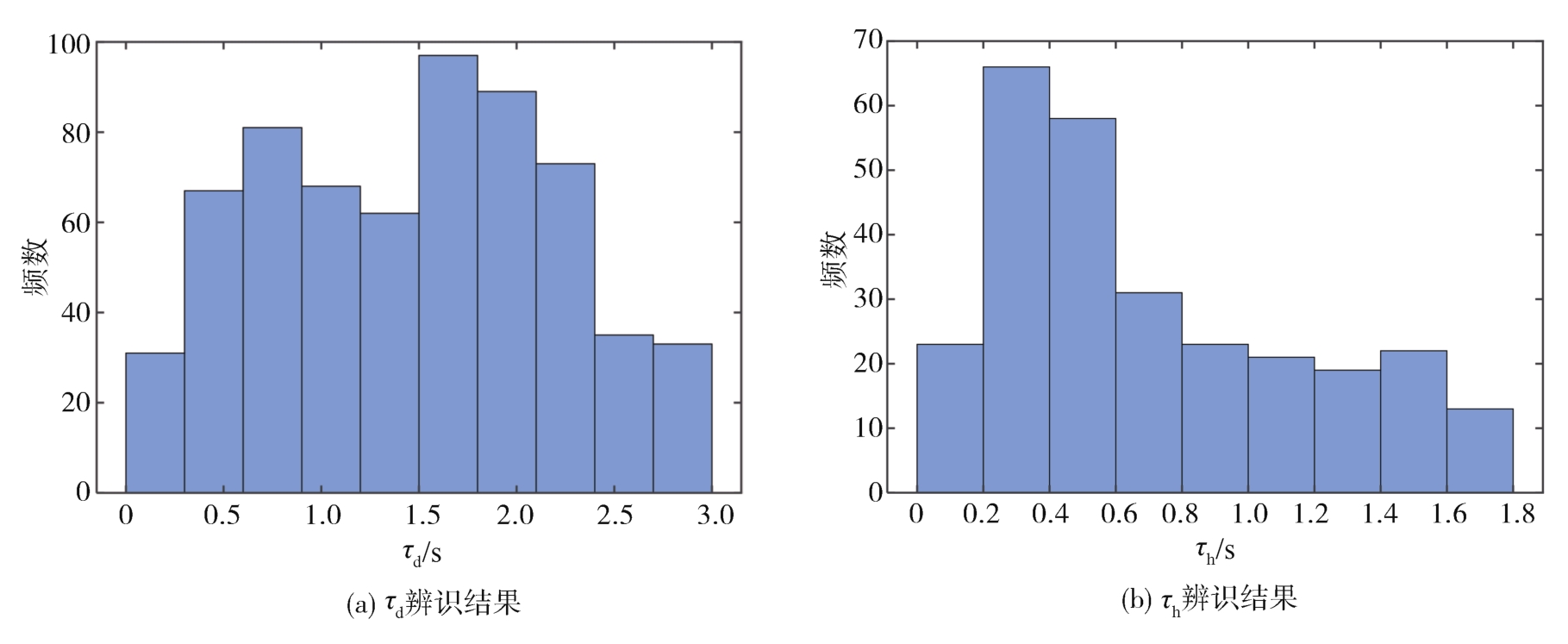

图6
不同驾驶人反应时间辨识结果"
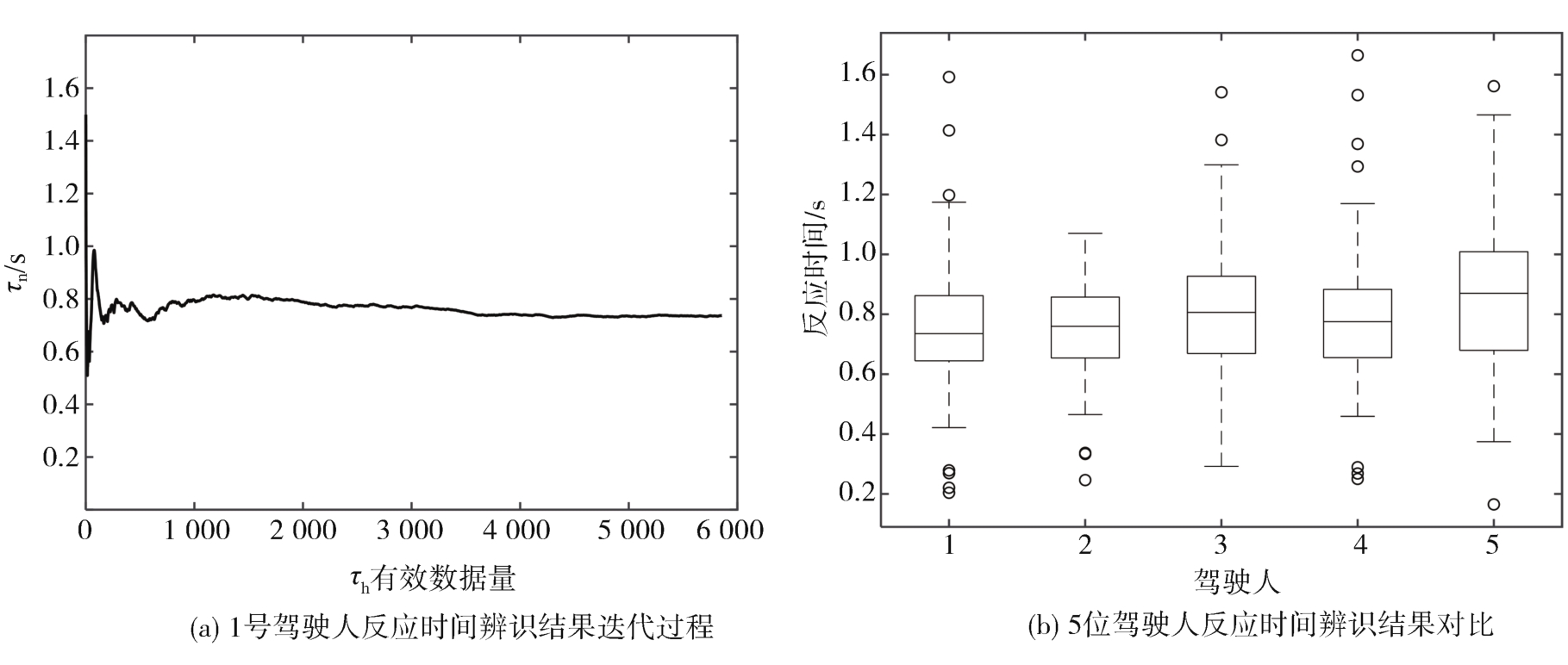
图7
案例A中各FCWI与制动信号对比图"
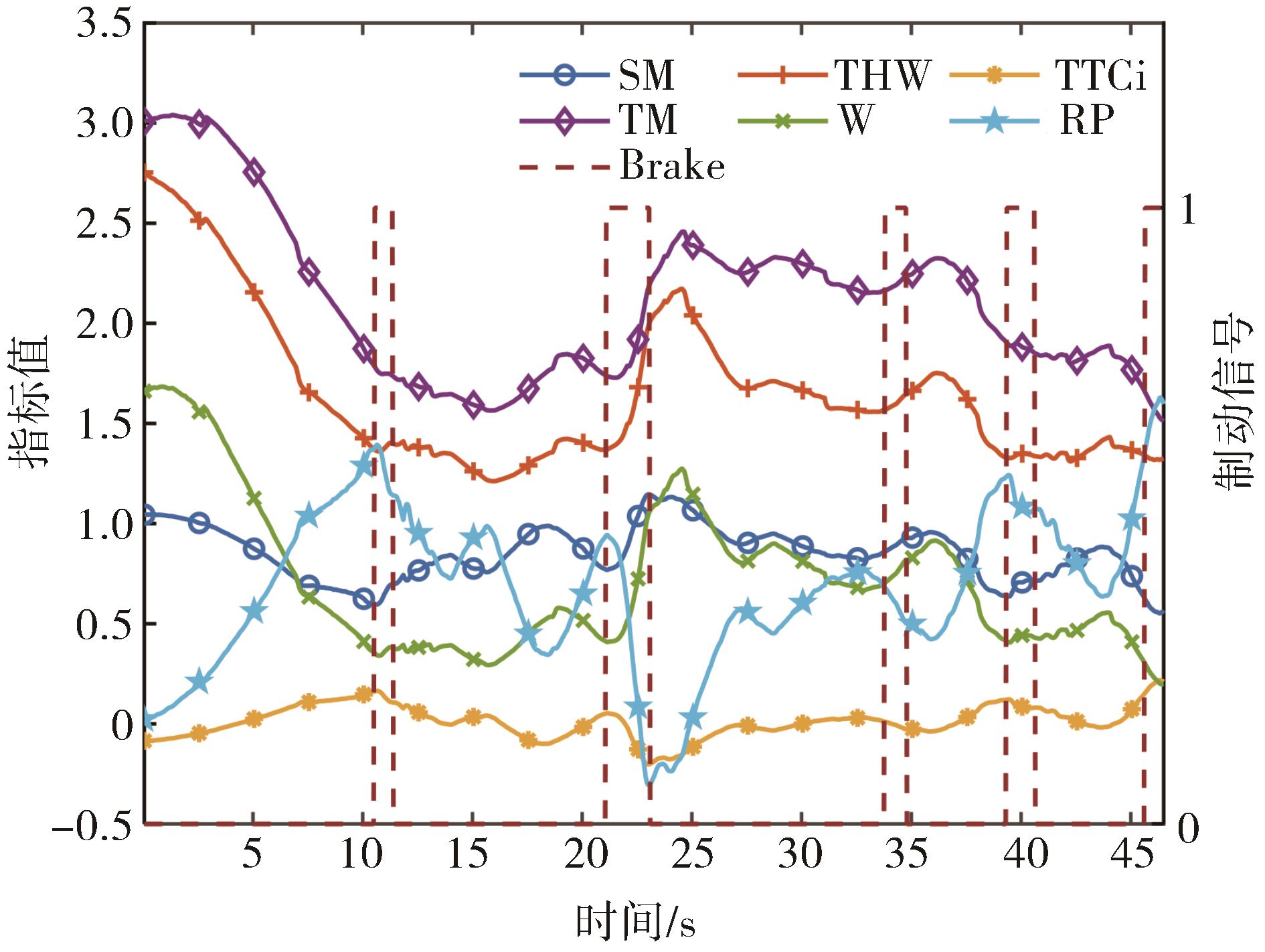
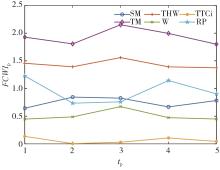
图8
案例A中FCWIp提取结果"
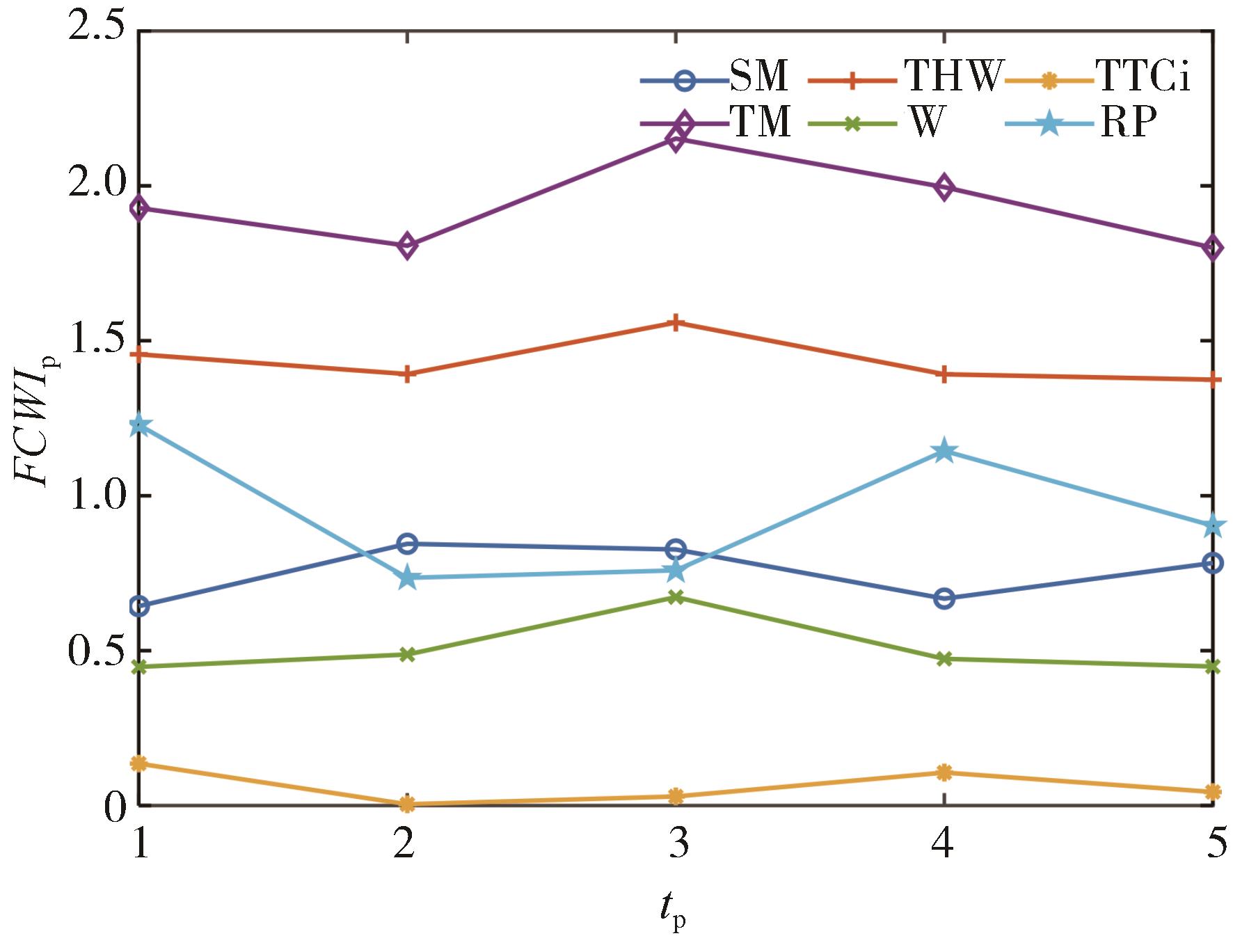
表4
所有驾驶人各FCWI阈值辨识结果"
| 编号 | TTCi/ s-1 | THW/s | TM/s | W | RP | SM | |
|---|---|---|---|---|---|---|---|
| 1 | 0.74 | 0.057 | 1.642 | 2.118 | 0.639 | 0.934 | 0.757 |
| 2 | 0.74 | 0.048 | 1.508 | 2.078 | 0.601 | 0.878 | 0.785 |
| 3 | 0.77 | 0.045 | 1.515 | 2.160 | 0.632 | 0.878 | 0.779 |
| 4 | 0.75 | 0.047 | 1.394 | 1.879 | 0.442 | 0.941 | 0.741 |
| 5 | 0.83 | 0.048 | 1.946 | 2.517 | 0.913 | 0.763 | 0.808 |
| 均值 | 0.77 | 0.049 | 1.601 | 2.151 | 0.645 | 0.879 | 0.774 |

图9
1号驾驶人各FCWI表现对比"
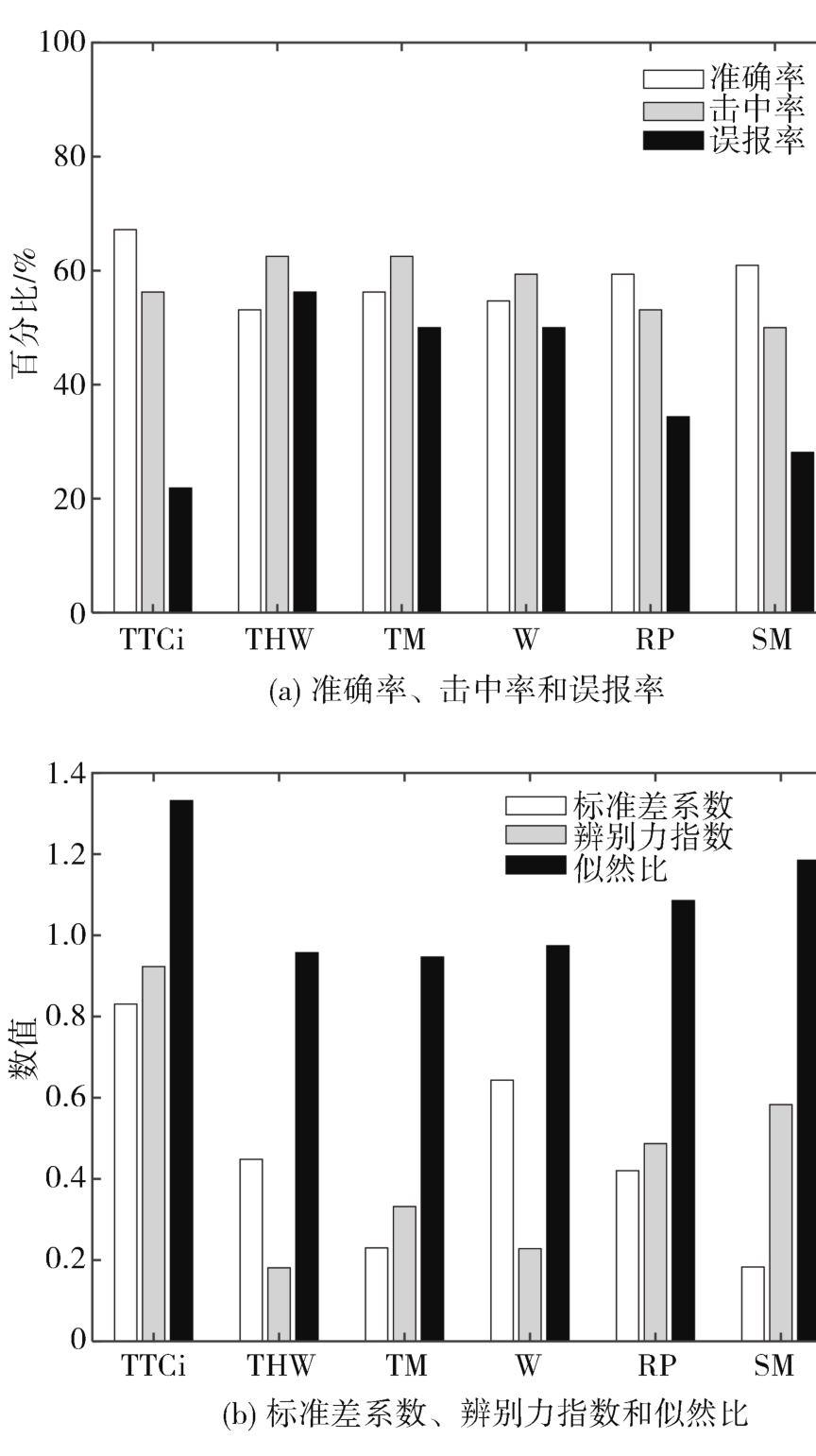
表5
所有驾驶人不同FCWI评价结果"
| 编号 | FCWI | ||||||
|---|---|---|---|---|---|---|---|
| 1 | TTCi | 0.83 | 67.19 | 56.25 | 21.88 | 0.92 | 1.33 |
| THW | 0.45 | 53.13 | 62.5 | 56.25 | 0.18 | 0.96 | |
| TM | 0.23 | 56.25 | 62.5 | 50 | 0.33 | 0.95 | |
| W | 0.64 | 54.69 | 59.38 | 50 | 0.23 | 0.97 | |
| RP | 0.42 | 59.38 | 53.13 | 34.38 | 0.49 | 1.09 | |
| SM | 0.18 | 60.94 | 50 | 28.13 | 0.58 | 1.19 | |
| 2 | TTCi | 0.87 | 67.07 | 58.54 | 24.39 | 0.93 | 1.25 |
| THW | 0.18 | 57.32 | 58.54 | 43.9 | 0.38 | 0.99 | |
| TM | 0.17 | 58.54 | 56.1 | 39.02 | 0.43 | 1.03 | |
| W | 0.43 | 58.54 | 60.98 | 43.9 | 0.43 | 0.97 | |
| RP | 0.29 | 64.63 | 58.54 | 29.27 | 0.78 | 1.14 | |
| SM | 0.11 | 67.07 | 60.98 | 26.83 | 0.89 | 1.16 | |
| 3 | TTCi | 0.84 | 62.16 | 52.7 | 28.38 | 0.66 | 1.18 |
| THW | 0.23 | 54.05 | 55.41 | 47.3 | 0.2 | 0.99 | |
| TM | 0.19 | 56.08 | 59.46 | 47.3 | 0.3 | 0.98 | |
| W | 0.45 | 59.46 | 63.51 | 44.59 | 0.48 | 0.95 | |
| RP | 0.32 | 62.84 | 52.7 | 27.03 | 0.69 | 1.2 | |
| SM | 0.13 | 63.51 | 51.35 | 24.32 | 0.73 | 1.28 | |
| 4 | TTCi | 1.8 | 65.52 | 72.41 | 41.38 | 0.81 | 0.87 |
| THW | 0.24 | 58.62 | 68.97 | 51.72 | 0.45 | 0.89 | |
| TM | 0.2 | 56.9 | 55.17 | 41.38 | 0.35 | 1.02 | |
| W | 0.58 | 65.52 | 65.52 | 34.48 | 0.82 | 1 | |
| RP | 0.48 | 65.52 | 68.97 | 37.93 | 0.8 | 0.93 | |
| SM | 0.18 | 62.07 | 62.07 | 37.93 | 0.61 | 1 | |
| 5 | TTCi | 1.15 | 61.43 | 52.86 | 30 | 0.6 | 1.14 |
| THW | 0.31 | 53.57 | 54.29 | 47.14 | 0.18 | 1 | |
| TM | 0.23 | 52.14 | 51.43 | 47.14 | 0.1 | 1 | |
| W | 0.49 | 52.14 | 51.43 | 47.14 | 0.1 | 1 | |
| RP | 0.44 | 59.29 | 52.86 | 34.29 | 0.49 | 1.09 | |
| SM | 0.14 | 60.71 | 54.29 | 32.86 | 0.54 | 1.1 | |
| 均值 | TTCi | 1.1 | 64.67 | 58.55 | 29.2 | 0.78 | 1.15 |
| THW | 0.28 | 55.34 | 59.94 | 49.26 | 0.28 | 0.96 | |
| TM | 0.2 | 55.98 | 56.93 | 44.97 | 0.3 | 0.99 | |
| W | 0.52 | 58.07 | 60.16 | 44.02 | 0.41 | 0.98 | |
| RP | 0.39 | 62.33 | 57.24 | 32.58 | 0.65 | 1.09 | |
| SM | 0.15 | 62.86 | 55.74 | 30.01 | 0.67 | 1.14 |
表6
3种RSR法评价各FCWI结果对比"
| 方法 | FCWI | ∑R | RSR | ||||
|---|---|---|---|---|---|---|---|
| 传统秩和比法 | TTCi | 1 | 6 | 4 | 6 | 17 | 0.71 |
| THW | 4 | 1 | 5 | 3 | 13 | 0.54 | |
| TM | 5 | 2 | 2 | 2 | 11 | 0.46 | |
| W | 2 | 3 | 6 | 1 | 12 | 0.50 | |
| RP | 3 | 4 | 3 | 4 | 14 | 0.58 | |
| SM | 6 | 5 | 1 | 5 | 17 | 0.71 | |
| 非整秩次秩和比法 | TTCi | 1.00 | 6.00 | 4.18 | 6.00 | 17.18 | 0.716 |
| THW | 5.32 | 1.00 | 5.75 | 1.00 | 13.07 | 0.544 | |
| TM | 5.74 | 1.34 | 2.35 | 2.07 | 11.50 | 0.479 | |
| W | 4.05 | 2.46 | 6.00 | 2.31 | 14.82 | 0.618 | |
| RP | 4.74 | 4.75 | 2.70 | 5.16 | 17.34 | 0.722 | |
| SM | 6.00 | 5.03 | 1.00 | 5.80 | 17.83 | 0.743 | |
| 比例秩和比法 | TTCi | 0.82 | 6.00 | 5.84 | 6.00 | 18.66 | 0.777 |
| THW | 3.21 | 5.13 | 5.98 | 3.56 | 17.88 | 0.745 | |
| TM | 4.50 | 5.19 | 5.68 | 3.90 | 19.27 | 0.803 | |
| W | 1.73 | 5.39 | 6.00 | 3.98 | 17.10 | 0.712 | |
| RP | 2.31 | 5.78 | 5.71 | 5.38 | 19.18 | 0.799 | |
| SM | 6.00 | 5.83 | 5.56 | 5.84 | 23.23 | 0.968 |
表7
3种RSR法评价FCWI排序对比"
| 排序 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 传统秩和比法 | SM | TTCi | RP | THW | W | TM |
| 非整秩次秩和比法 | SM | RP | TTCi | W | THW | TM |
| 比例秩和比法 | SM | TM | RP | TTCi | THW | W |
| 1 | CICCHINO J B. Effectiveness of forward collision warning and autonomous emergency braking systems in reducing front-to-rear crash rates[J]. Accident Analysis & Prevention, 2017, 99: 142-152. |
| 2 | LIU Y C, HO C H. A comparison of car following behaviors: effectiveness of applying statistical quality control charts to design in-vehicle forward collision warning systems[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2018, 53: 143-154. |
| 3 | WU X W, BOYLE L N, MARSHALL D, et al. The effectiveness of auditory forward collision warning alerts[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2018, 59: 164-178. |
| 4 | ZHU M, WANG X, HU J. Impact on car following behavior of a forward collision warning system with headway monitoring [J]. Transportation Research Part C: Emerging Technologies, 2020, 111: 226-244. |
| 5 | DEGUZMAN C A, DONMEZ B. Knowledge of and trust in advanced driver assistance systems[J]. Accident Analysis & Prevention, 2021, 156: 106-121. |
| 6 | HARTWICH F, WITZLACK C, BEGGIATO M, et al. The first impression counts-a combined driving simulator and test track study on the development of trust and acceptance of highly automated driving[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2019, 65: 522–535. |
| 7 | 熊晓夏, 陈龙, 梁军, 等. 基于驾驶员避撞行为的行车风险判别方法的仿真研究[J]. 汽车工程, 2019, 41(2): 153-160,169. |
| XIONG X X, CHEN L, LIANG J, et al. Simulation study on driving risk discrimination based on driver's collision avoidance behavior[J]. Automotive Engineering, 2019, 41(2): 153-160,169. | |
| 8 | 胡远志, 杨喜存, 刘西, 等. 基于驾驶员特性的主动避撞分级制动策略与验证[J]. 汽车工程, 2019, 41(3): 298-306. |
| HU Y Z, YANG X C, LIU X, et al. Hierarchic braking strategy for active collision avoidance and its verification based on driver’s characteristics[J]. Automotive Engineering, 2019, 41(3): 298-306. | |
| 9 | 裴晓飞, 刘昭度, 马国成, 等. 汽车主动避撞系统的安全距离模型和目标检测算法[J]. 汽车安全与节能学报, 2012, 3(1): 26-33. |
| PEI X F, LIU Z D, MA G C, et al. Safe distance model and obstacle detection algorithms for a collision warning and collision avoidance system[J]. Journal of Automotive Safety and Energy, 2012, 3(1): 26-33. | |
| 10 | 臧利国, 滕飞, 彭志洋, 等. 改进Berkeley模型的汽车防碰撞预警算法[J]. 机械科学与技术, 2018, 37(7): 1082-1088. |
| ZANG L G, TENG F, PENG Z Y, et al. Improved vehicle anti-collision warning algorithm based on Berkeley model[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(7): 1082-1088. | |
| 11 | 王殿海, 金盛. 车辆跟驰行为建模的回顾与展望[J]. 中国公路学报, 2012, 25(1): 115-127. |
| WANG D H, JIN S. Review and outlook of modeling of car following behavior[J]. China Journal of Highway and Transport, 2012, 25(1): 115-127. | |
| 12 | LUBBE N, ERIK R. Pedestrian crossing situations: quantification of comfort boundaries to guide intervention timing[J]. Accident Analysis & Prevention, 2014, 71: 261-266. |
| 13 | TAK S, KIM S, LEE D, et al. A comparison analysis of surrogate safety measures with car-following perspectives for advanced driver assistance system[J]. Journal of Advanced Transportation, 2018, 2018: 1-14. |
| 14 | IRANMANESH S M, MAHJOUB H N, KAZEMI H, et al. An adaptive forward collision warning framework design based on driver distraction[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(12): 3925-3934. |
| 15 | 朱西产, 魏昊舟, 马志雄. 基于自然驾驶数据的跟车场景潜在风险评估[J]. 中国公路学报, 2020, 33(4): 169-181. |
| ZHU X C, WEI H Z, MA Z X. Assessment of the potential risk in car-following scenario based on naturalistic driving data[J]. China Journal of Highway and Transport, 2020, 33(4): 169-181. | |
| 16 | SEILER P J, SONG B, HEDRICK J K. Development of a collision avoidance system[J]. Automotive Engineering International, 1998, 106(9): 1334-1340. |
| 17 | KONDOH T, YAMAMURA T, KITAZAKI S, et al. Identification of visual cues and quantification of drivers' perception of proximity risk to the lead vehicle in car-following situations[J]. Journal of Mechanical Systems for Transportation and Logistics, 2008, 1(2): 170-180. |
| 18 | LU G Q, CHENG B, LIN Q F, et al. Quantitative indicator of homeostatic risk perception in car following[J]. Safety Science, 2012, 50(9): 1898-1905. |
| 19 | 林庆峰, 成波, 徐少兵, 等. 基于Logistic回归的危险认知模型与避撞时间模型的对比[J]. 中国公路学报, 2012, 25(6): 123-128. |
| LIN Q F, CHENG B, XU S B, et al. Comparison of risk perception model based on Logistic regression and time-to-collision model[J]. China Journal of Highway and Transport, 2012, 25(6): 123-128. | |
| 20 | 金辉, 李昊天. 基于驾驶风格的前撞预警系统报警策略[J]. 汽车工程, 2021, 43(3): 405-413. |
| JIN H, LI H T. Alarm strategy for frontal crash warning system based on driving style[J]. Automotive Engineering, 2021, 43(3): 405-413. | |
| 21 | WANG J Q, YU C F, LI S B, et al. A forward collision warning algorithm with adaptation to driver behaviors[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 17(4): 1157-1167. |
| 22 | ARBABZADEH N, JAFARI M, JALAYER M, et al. A hybrid approach for identifying factors affecting driver reaction time using naturalistic driving data[J]. Transportation Research Part C: Emerging Technologies, 2019, 100: 107-124. |
| 23 | WANG C, SUN Q Y, ZHEN L, et al. A forward collision warning system based on self-learning algorithm of driver characteristics[J]. Journal of Intelligent & Fuzzy Systems, 2020, 38(2): 1519-1530. |
| 24 | 刘晓佳, 张可. 基于加权秩和比法的桥梁施工方案优选研究[J]. 重庆交通大学学报(自然科学版), 2018, 37(10): 21-25.LIU X J, ZHANG K. Optimal schemes of bridge construction based on weighted rank sum ration method[J]. Journal of Chongqing Jiaotong University (Natural Science), 2018, 37(10): 21-25. |
| 25 | 王建军, 曹旭东, 杨云峰. 基于CRSG模型的山区公路风险隔离研究[J]. 中国公路学报, 2018, 31(9): 119-128. |
| WANG J J, CAO X D, YANG Y F. Risk isolation analysis of mountain highways areas based on CRSG model[J]. China Journal of Highway and Transport, 2018, 31(9): 119-128. | |
| 26 | NEWELL G F. A simplified car-following theory: a lower order model[J]. Transportation Research Part B: Methodological, 2002, 36(3): 195-205. |
| 27 | DEWAR R E, OLSON P L. Human factors in traffic safety, second edition[M]. Publication of Lawyers & Judges Publishing Company Incorporated, 2002. |
| 28 | AHN S, MICHAEL J C, JORGE L. Verification of a simplified car-following theory[J]. Transportation Research Part B: Methodological, 2004, 38(5): 431-440. |
| [1] | 马艳丽, 秦钦, 董方琦, 娄艺苧. 基于风险场的不同认知次任务下接管风险评估模型[J]. 汽车工程, 2024, 46(1): 9-17. |
| [2] | 马艳丽,卢俊,朱洁玉,韩笑雪. 不同认知负荷非驾驶任务下高度自动化驾驶接管绩效预测[J]. 汽车工程, 2023, 45(12): 2330-2337. |
| [3] | 郭柏苍,谢宪毅,金立生,戎辉,贺阳,纪丙东. 考虑多维驾驶特性的制动反应时间预测模型[J]. 汽车工程, 2021, 43(11): 1683-1692. |
| [4] | 李亚勇, 蔡英凤, 陈龙, 孙晓强, 何友国, 张云顺. 考虑前后方车辆行驶状态的ACC系统控制方法*[J]. 汽车工程, 2019, 41(8): 865-871. |
|