汽车工程 ›› 2023, Vol. 45 ›› Issue (12): 2330-2337.doi: 10.19562/j.chinasae.qcgc.2023.12.015
所属专题: 智能网联汽车技术专题-感知&HMI&测评2023年
马艳丽( ),卢俊,朱洁玉(),韩笑雪
),卢俊,朱洁玉(),韩笑雪
Yanli Ma(),Jun Lu,Jieyu Zhu(),Xiaoxue Han
摘要:
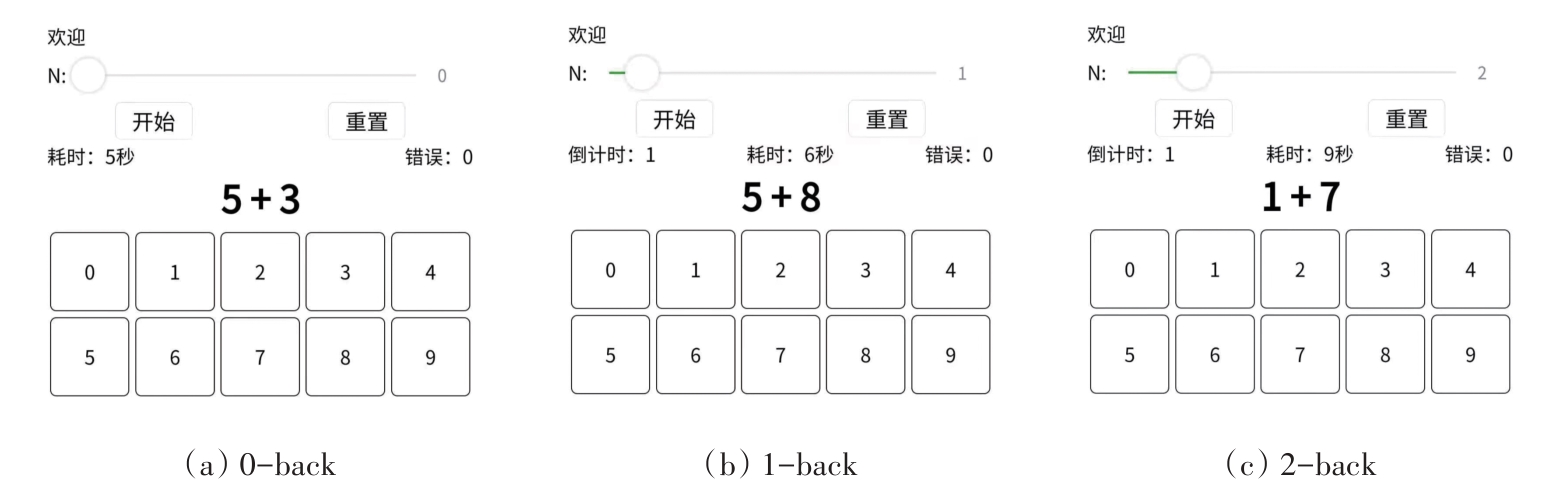
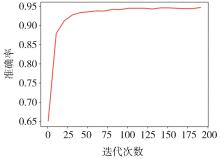
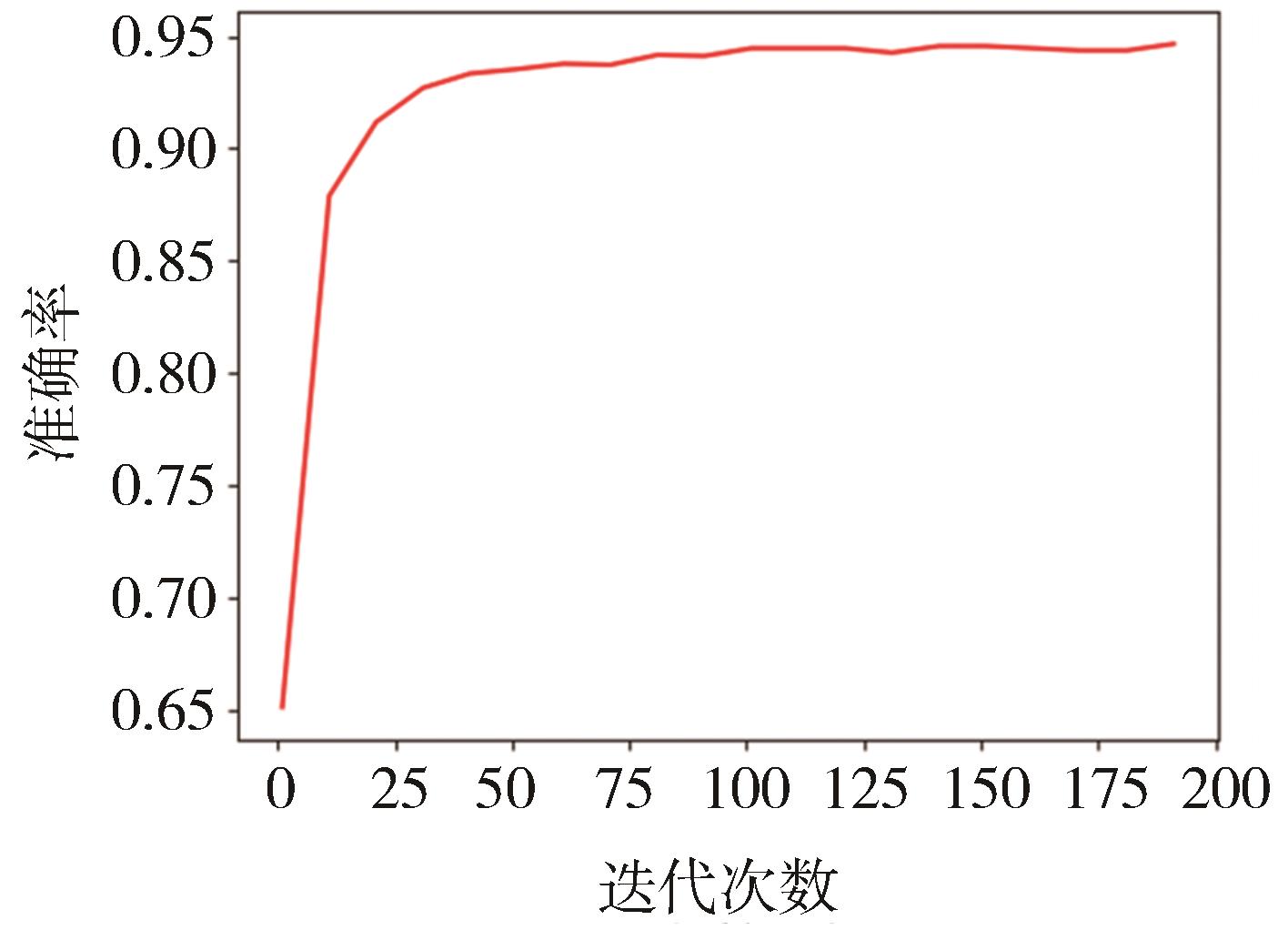
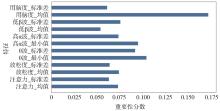
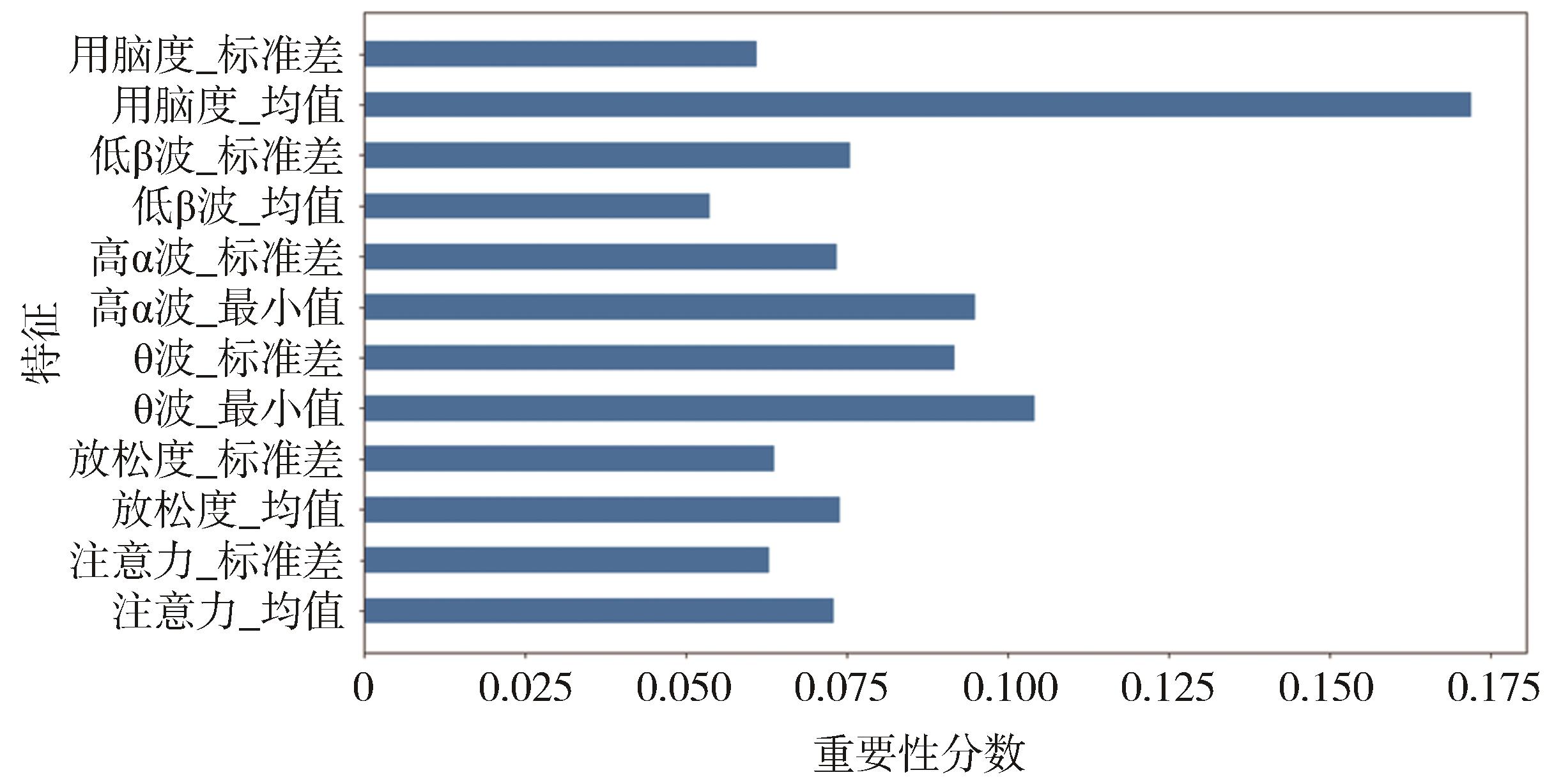
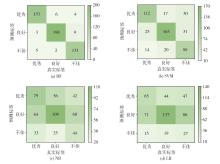
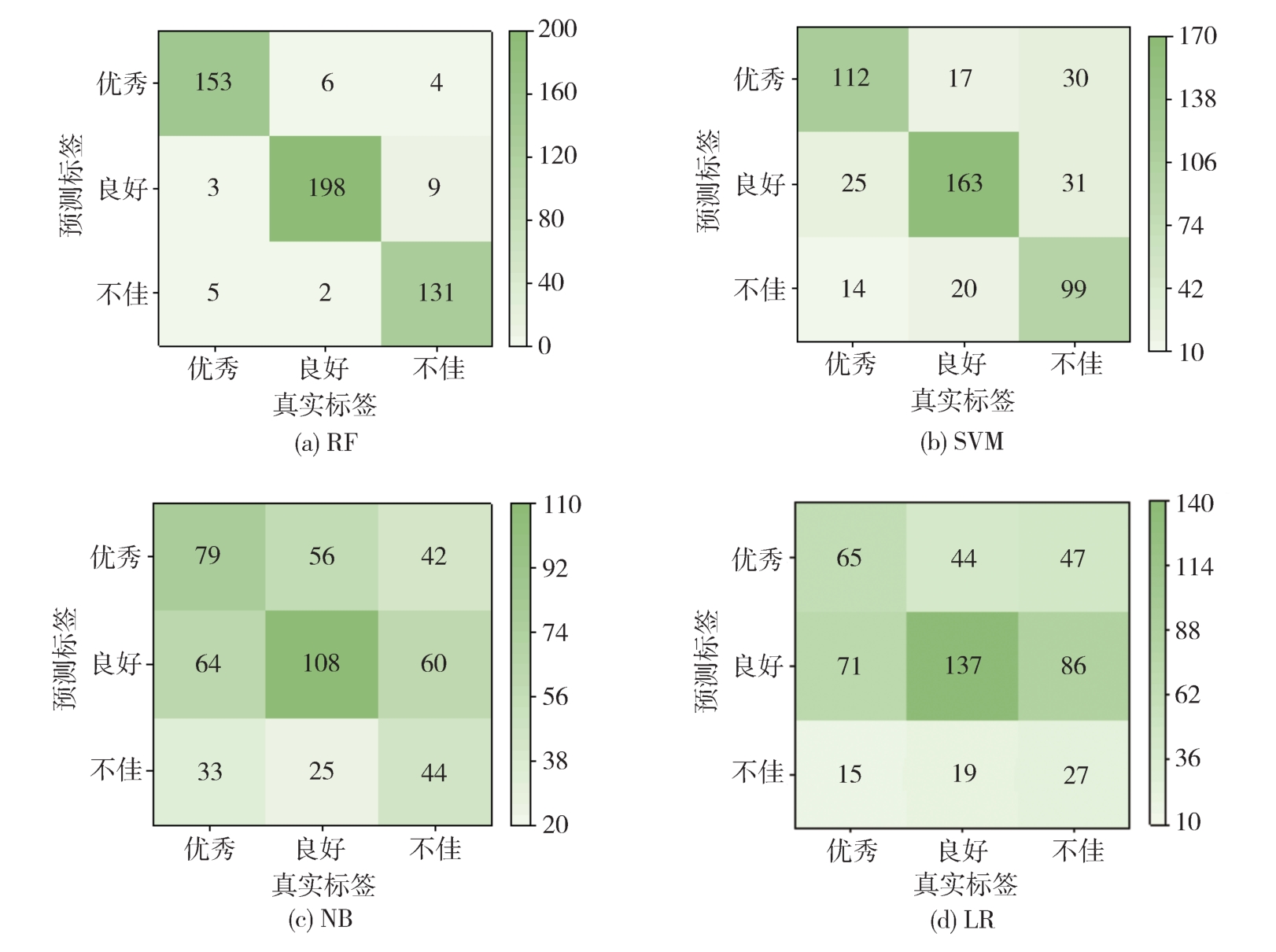
在高级自动化驾驶中,准确预测驾驶接管绩效对于提高自动驾驶接管安全水平意义重大。文中设计了不同认知负荷非驾驶任务下驾驶接管场景,分析不同认知负荷非驾驶任务下驾驶接管绩效指标与脑电指标的显著性,采用驾驶人eSense数值和脑电波数据作为输入特征,构建了基于随机森林的驾驶接管绩效预测模型,分析了模型在3、5、7、9 s 4种时间窗下的预测性能,并开展了模型的有效性验证。结果表明,不同认知负荷非驾驶任务下的接管时间、最大横向加速度、最小TTC及驾驶人eSense等存在显著性差异;随机森林在9 s时间窗下的预测性能最佳,其准确率达到了0.94;随机森林的预测准确率和micro-AUC面积高于支持向量机、朴素贝叶斯和逻辑回归。研究方法可有效预测驾驶员自动驾驶接管绩效,并为驾驶员与自动驾驶车辆之间的交互设计提供理论依据。