汽车工程 ›› 2023, Vol. 45 ›› Issue (2): 231-242.doi: 10.19562/j.chinasae.qcgc.2023.02.008
所属专题: 智能网联汽车技术专题-感知&HMI&测评2023年
崔格格,吕超,李景行,张哲雨,熊光明( ),龚建伟
),龚建伟
收稿日期:2022-07-11
修回日期:2022-09-15
出版日期:2023-02-25
发布日期:2023-02-21
通讯作者:
熊光明
E-mail:xiongguangming@bit.edu.cn
基金资助:
Gege Cui,Lü Chao,Jinghang Li,Zheyu Zhang,Guangming Xiong(),Jianwei Gong
Received:2022-07-11
Revised:2022-09-15
Online:2023-02-25
Published:2023-02-21
Contact:
Guangming Xiong
E-mail:xiongguangming@bit.edu.cn
摘要:
为实现智能车辆危险预警辅助功能,精确建立个体驾驶员的个性化辅助系统,提出一种数据驱动的智能车个性化场景风险图构建方法。构建复杂交通场景中动静态要素属性与要素之间隐含交互关系的图表征,使用图核方法对图表征数据进行相似性度量,处理分析驾驶员操作数据并获取驾驶员个性化场景危险程度评价标签。基于支持向量机训练识别模型,建立驾驶员个性化危险评价机理与场景特征之间的映射关系,以模型输出的危险程度评价标签与真实值进行实验对比。结果表明,基于场景风险图构建的驾驶员个性化危险场景识别模型识别准确率可达95.8%,比特征向量表示法提高了38.2%,能够有效地做出基于驾驶员驾驶风格的个性化场景危险程度评价。
崔格格,吕超,李景行,张哲雨,熊光明,龚建伟. 数据驱动的智能车个性化场景风险图构建[J]. 汽车工程, 2023, 45(2): 231-242.
Gege Cui,Lü Chao,Jinghang Li,Zheyu Zhang,Guangming Xiong,Jianwei Gong. Data-Driven Personalized Scenario Risk Map Construction for Intelligent Vehicles[J]. Automotive Engineering, 2023, 45(2): 231-242.
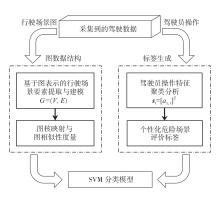
图1
数据驱动的智能车个性化场景风险图构建方法"
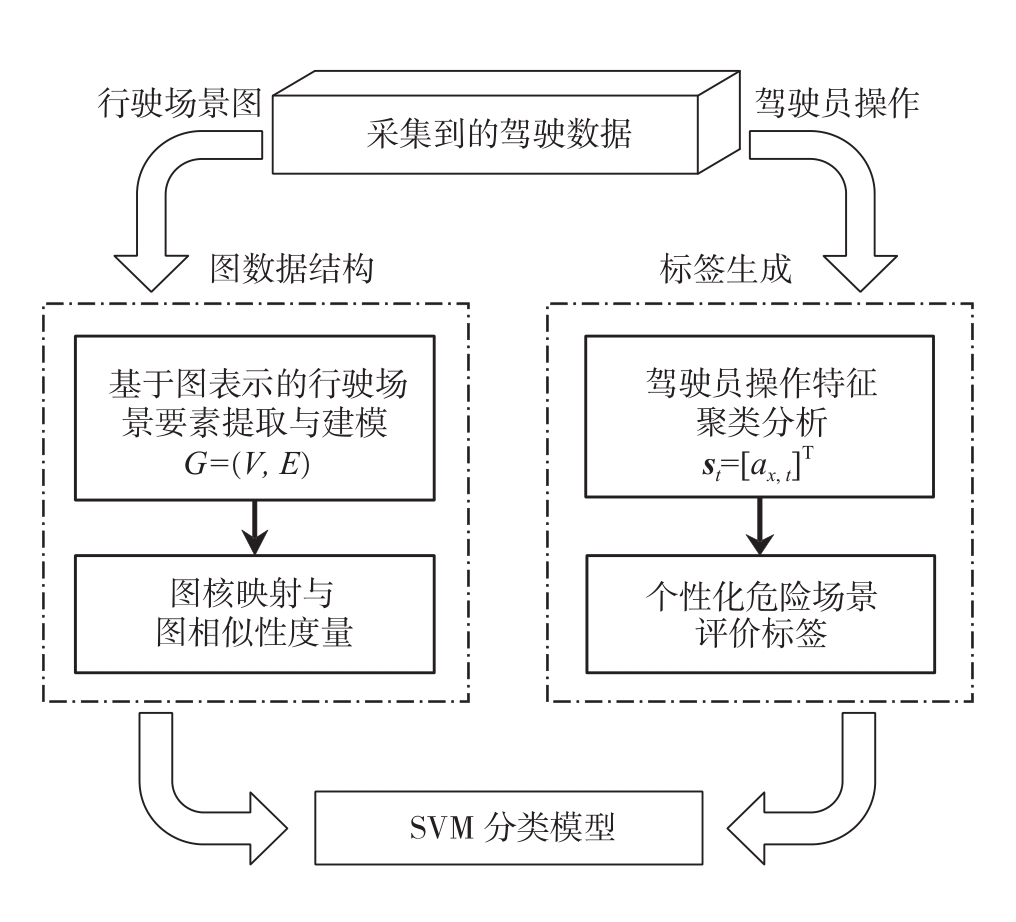
图2
图模型节点生成示例"
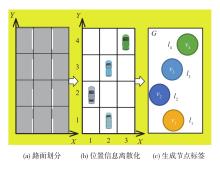
图3
图模型节点标签生成示例"
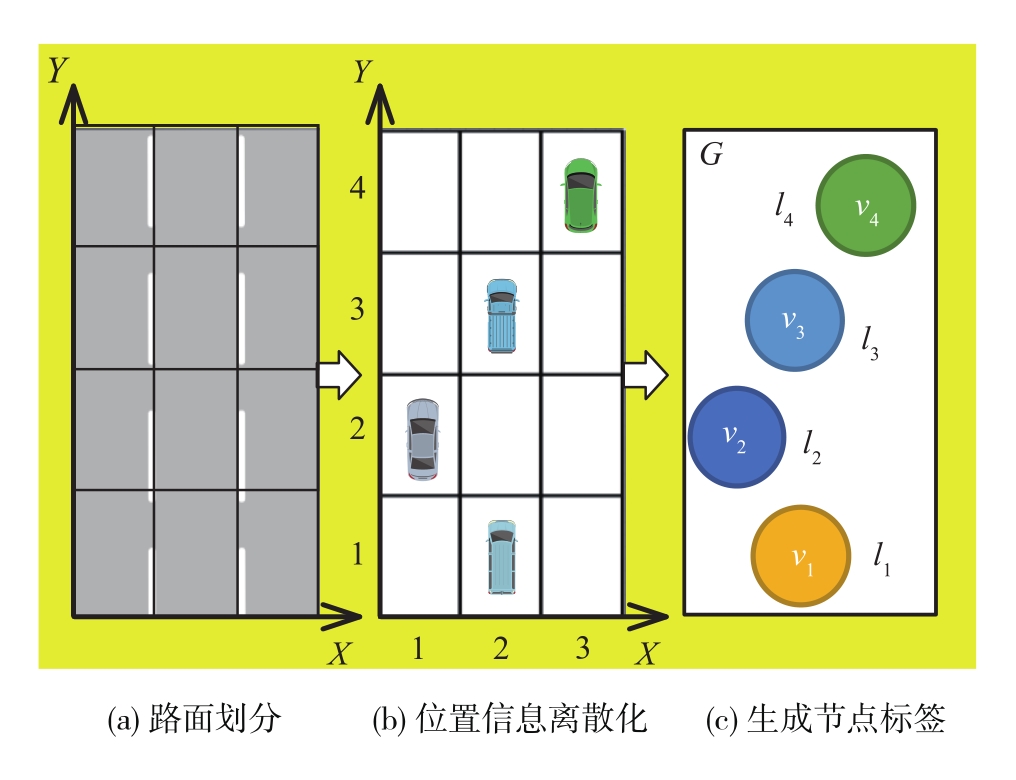
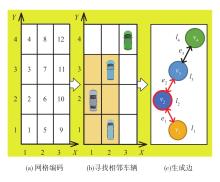
图4
图模型边生成示例"
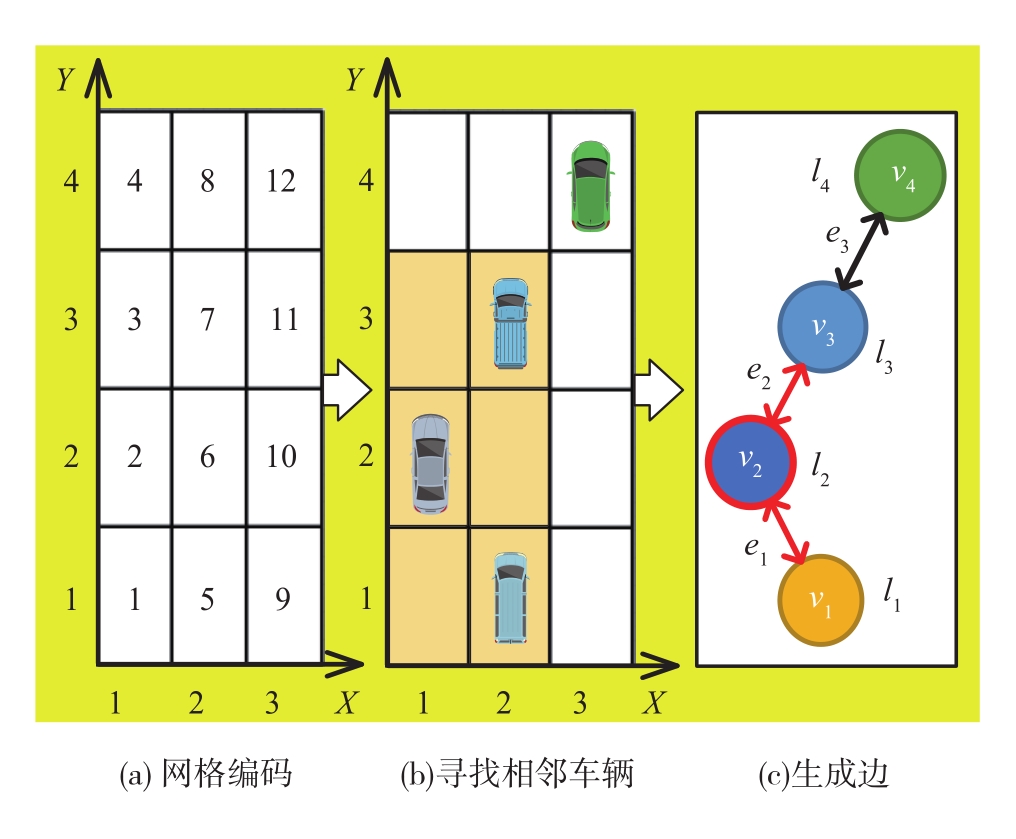
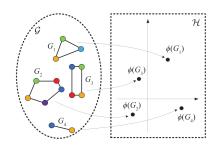
图5
由图核定义的特征空间及其映射"
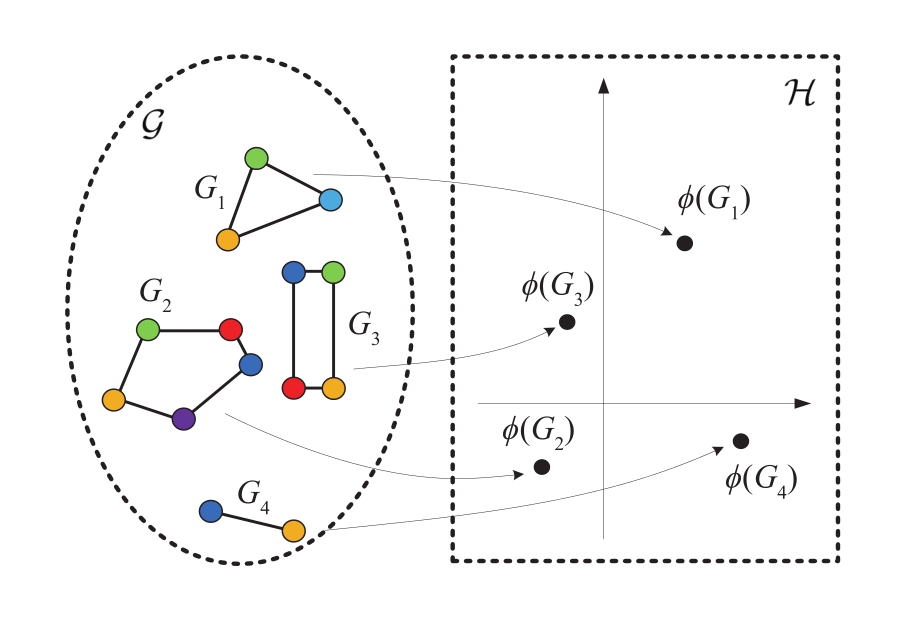
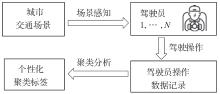
图6
基于驾驶员操作数据的个性化危险场景评价生成"
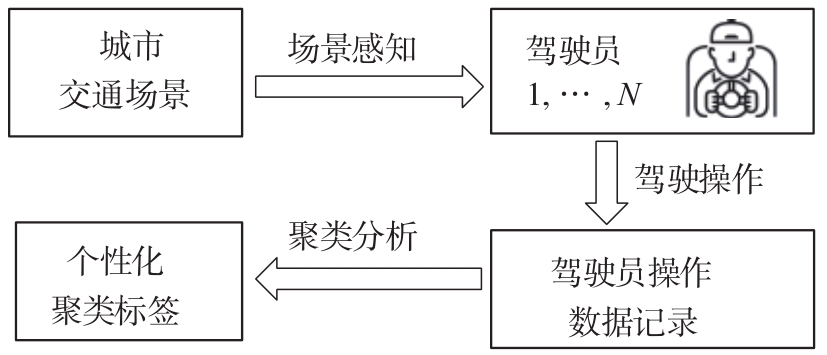

图7
数据采集平台"

表1
驾驶员基本信息表"
| 驾驶员编号 | 性别 | 年龄/岁 | 驾龄/年 |
|---|---|---|---|
| 1 | 男 | 33 | 10 |
| 2 | 男 | 29 | 6 |
| 3 | 男 | 22 | 2 |
表2
驾驶员操作数据聚类特征选择表"
驾驶员1 操作特征 | ||||
|---|---|---|---|---|
| RSS | SC | RSS | SC | |
| K=2 | 2.31 | 0.82 | 1 500 | 0.54 |
| K=3 | 1.06 | 0.75 | 1 000 | 0.62 |
| K=4 | 0.54 | 0.76 | 982 | 0.53 |
| K=5 | 0.21 | 0.77 | 667 | 0.44 |
| K=6 | 0.08 | 0.76 | 653 | 0.49 |
| K=7 | 0.06 | 0.75 | 641 | 0.51 |
| K=8 | 0.04 | 0.74 | 506 | 0.52 |
| K=9 | 0.02 | 0.76 | 479 | 0.54 |
| K=10 | 0.02 | 0.74 | 433 | 0.56 |
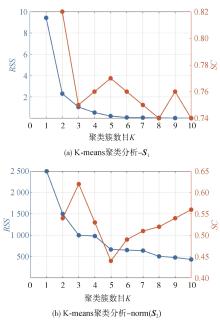
图8
对特征矩阵的K-means聚类效果分析"
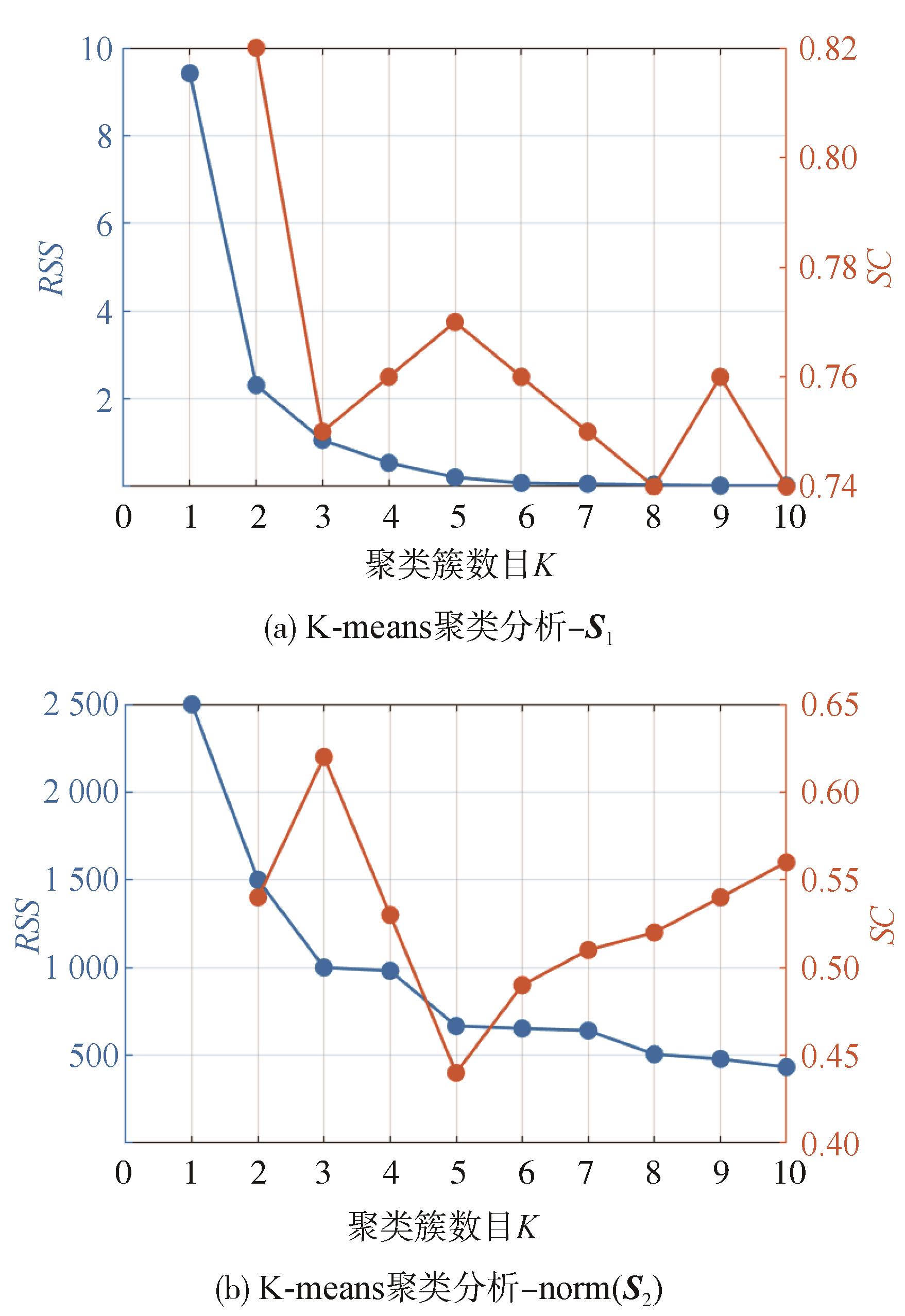
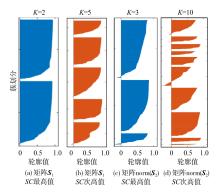
图9
驾驶员1两种特征矩阵对应操作数据轮廓图"
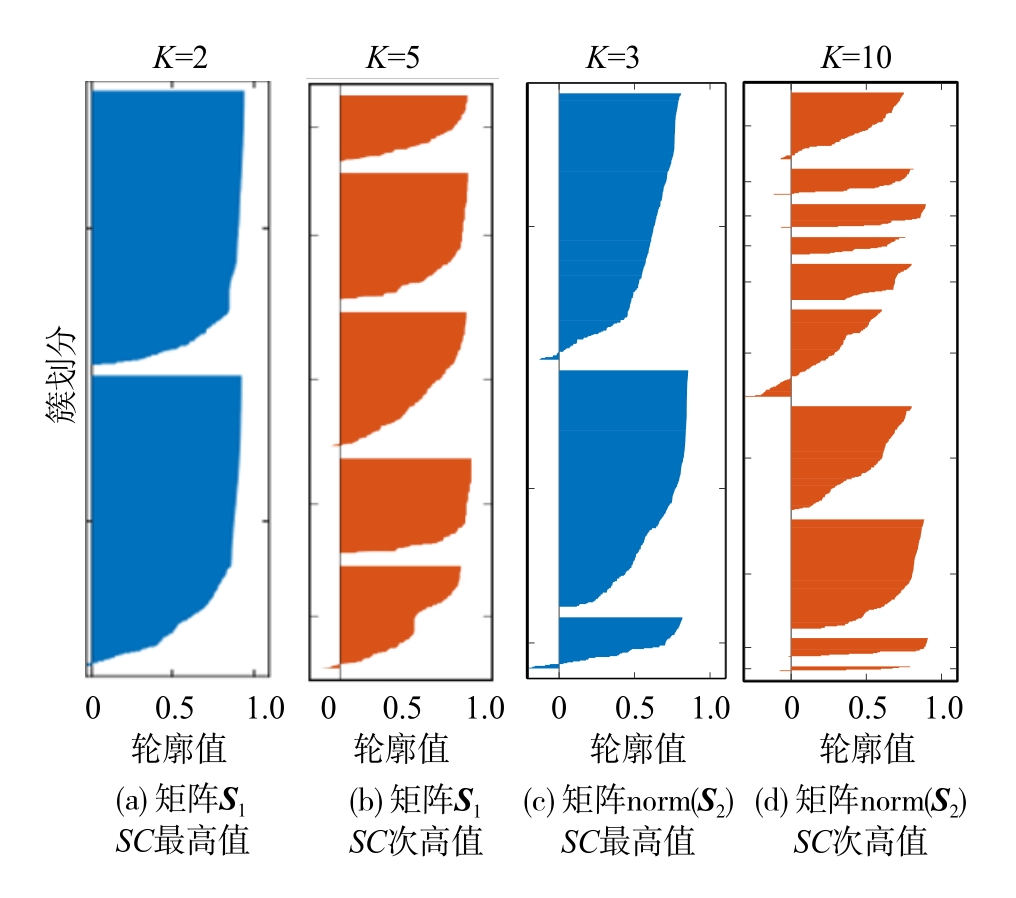
表3
驾驶员操作数据聚类K值选择表"
| 驾驶员 | 驾驶员1 | 驾驶员2 | 驾驶员3 | |||
|---|---|---|---|---|---|---|
| RSS | SC | RSS | SC | RSS | SC | |
| K=2 | 2.31 | 0.82 | 9.67 | 0.86 | 11.17 | 0.76 |
| K=3 | 1.06 | 0.75 | 0.67 | 0.84 | 2.14 | 0.75 |
| K=4 | 0.54 | 0.76 | 1.13 | 0.81 | 0.61 | 0.72 |
| K=5 | 0.21 | 0.77 | 0.08 | 0.80 | 0.57 | 0.78 |
| K=6 | 0.08 | 0.76 | 0.19 | 0.78 | 0.15 | 0.75 |
| K=7 | 0.06 | 0.75 | 0.11 | 0.77 | 0.09 | 0.74 |
| K=8 | 0.04 | 0.74 | 0.07 | 0.78 | 0.08 | 0.72 |
| K=9 | 0.02 | 0.76 | 0.01 | 0.79 | 0.02 | 0.73 |
| K=10 | 0.02 | 0.74 | 0.07 | 0.78 | 0.06 | 0.73 |
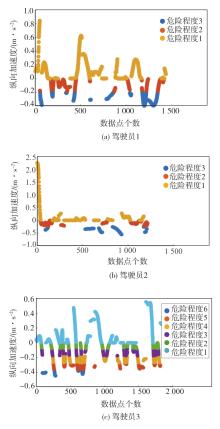
图10
驾驶员个性化场景危险程度评价标签聚类结果"

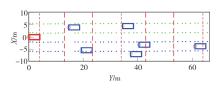
图11
基于实车数据的行驶场景网格划分与鸟瞰图生成"
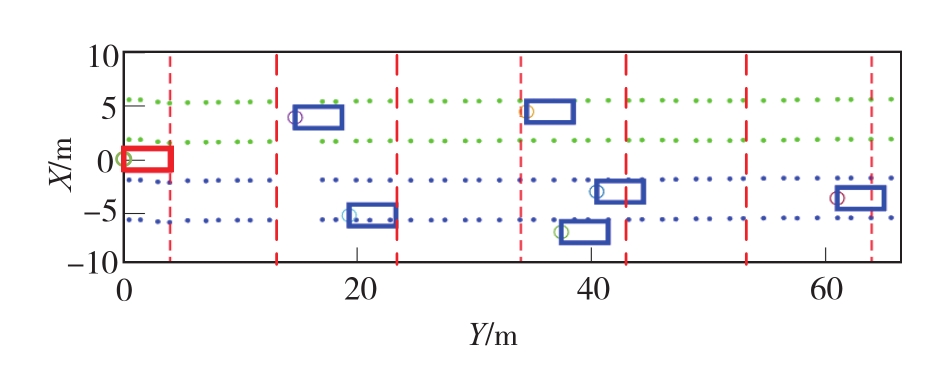

图12
典型换道交互场景图结构数据提取"

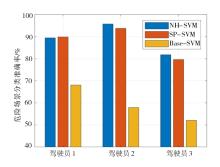
图13
危险场景识别准确率"
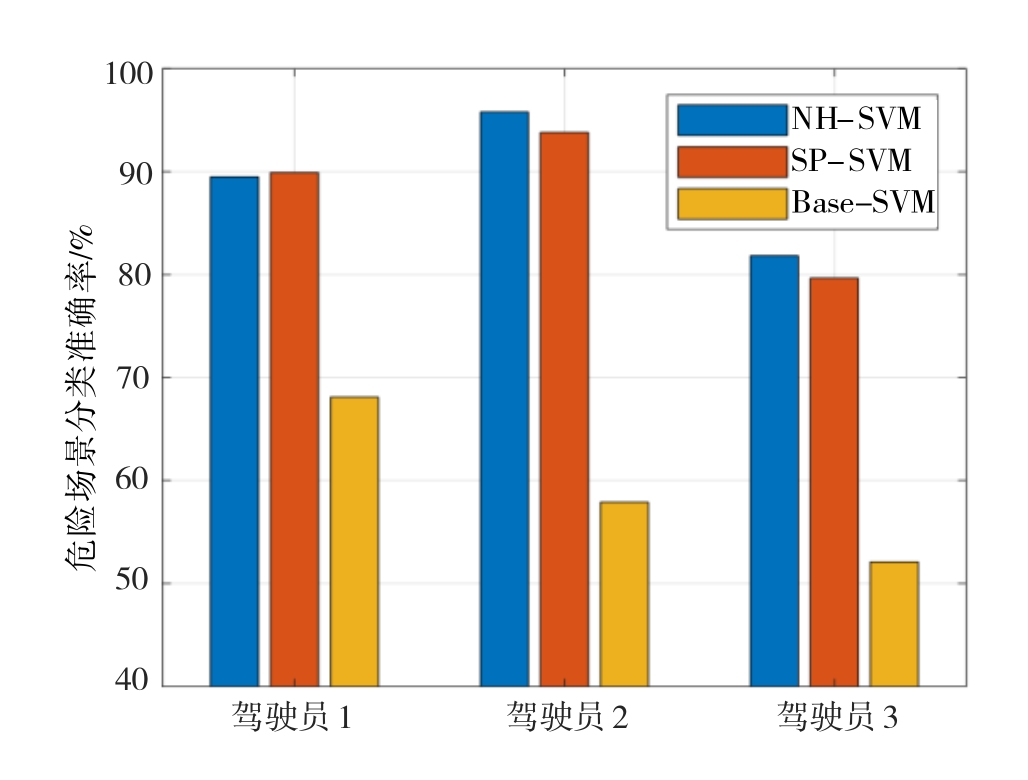
图14
驾驶员1危险场景识别结果混淆矩阵"
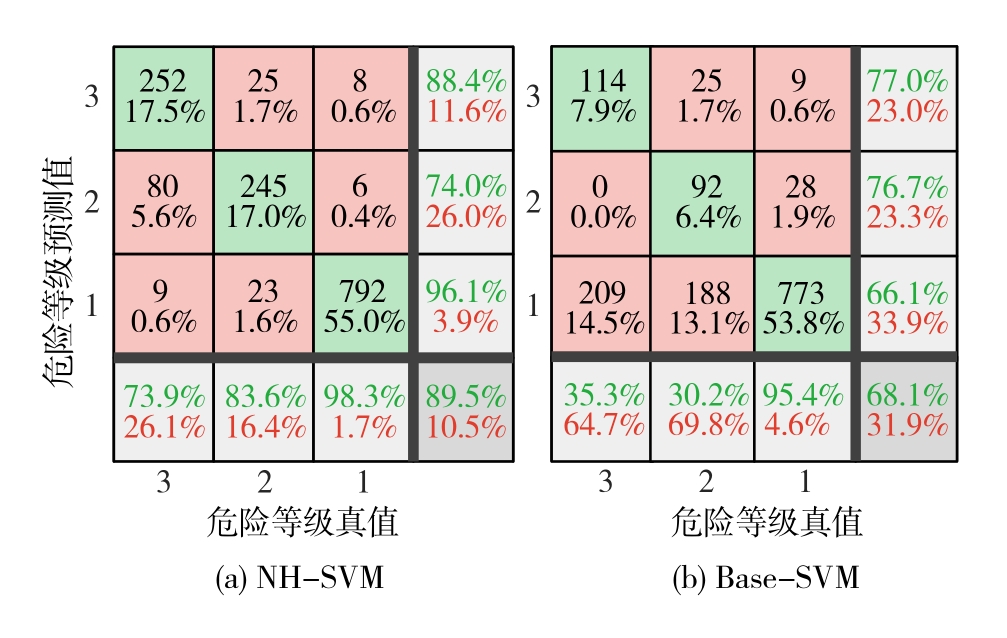
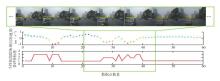
图15
驾驶员操作数据与危险行驶场景识别结果"

| 1 | SINGH S. Critical reasons for crashes investigated in the national motor vehicle crash causation survey[J]. Traffic Safety Facts - Crash Stats, 2015. |
| 2 | PETRIDOU E, MOUSTAKI M. Human factors in the causation of road traffic crashes[J]. European Journal of Epidemiology, 2000, 16(9). |
| 3 | ZHU B, HAN J, ZHAO J, et al. Combined hierarchical learning framework for personalized automatic lane-changing[J]. IEEE Transactions on Intelligent Transportation Systems, 2021,22(10):6275-6285. |
| 4 | YI R, STEVEN E, YIWEI W, et al. How shall I drive? interaction modeling and motion planning towards empathetic and socially-graceful driving[J]. CoRR, 2019, abs/1901.10013. |
| 5 | CAO S, SAMUEL S, MURZELLO Y, et al. Hazard perception in driving: a systematic literature review[J]. Transportation Research Record, 2022:03611981221096666. |
| 6 | WANG J Q, HUANG H, LI YANG, et al. Driving risk assessment based on naturalistic driving study and driver attitude questionnaire analysis[J]. Accident Analysis and Prevention, 2020, 145. |
| 7 | ASADAMRAJI M, SAFFARZADEH M, ROSS V, et al. A novel driver hazard perception sensitivity model based on drivers’ characteristics: a simulator study[J]. Traffic Injury Prevention, 2019, 20(5):492-497. |
| 8 | MORAN C, BENNETT N, PRABHAKHAR P. Road user hazard perception tests: a systematic review of current methodologies[J]. Accident Analysis and Prevention, 2019, 129. |
| 9 | STRICKLAND M, FAINEKOS G, AMOR H B. Deep predictive models for collision risk assessment in autonomous driving[C]. 2018 IEEE International Conference on Robotics and Automation (ICRA), 2018:4685-4692. |
| 10 | WAGNER S, GROH K, KUHBECK T, et al. Using time-to-react based on naturalistic traffic object behavior for scenario-based risk assessment of automated driving[C]. 2018 IEEE Intelligent Vehicles Symposium (IV), 2018:1521-1528. |
| 11 | LI M, CHEN S, CHEN X, et al. Symbiotic graph neural networks for 3D skeleton-based human action recognition and motion prediction[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(6):3316-3333. |
| 12 | ZÜRN J, VERTENS J, BURGARD W. Lane graph estimation for scene understanding in urban driving[J]. IEEE Robotics and Automation Letters, 2021, 6(4):8615-8622. |
| 13 | GAO Y, LI Y F, LIN Y, et al. Deep learning on knowledge graph for recommender system: a survey[J]. arXiv Preprint arXiv:, 2020. |
| 14 | YAQIONG Q, XIANGYANG L, CHENLIANG L, et al. Heterogeneous graph-based joint representation learning for users and POIs in location-based social network[J]. Information Processing and Management, 2020, 57(2). |
| 15 | YURTSEVER E, YAMAZAKI S, MIYAJIMA C, et al. Integrating driving behavior and traffic context through signal symbolization for data reduction and risky lane change detection[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(3):242-253. |
| 16 | NILS M K, FREDRIK D J, CHRISTOPHER M. A survey on graph kernels[J]. Applied Network Science, 2020, 5(12). |
| 17 | BORGWARDT K M, KRIEGEL H, VISHWANATHAN S V N, et al. Graph kernels for disease outcome prediction from protein-protein interaction networks[J]. Pacific Symposium on Biocomputing. Pacific Symposium on Biocomputing, 2007. |
| 18 | BORGWARDT K M, KRIEGEL H P. Shortest-path kernels on graphs[C]. Fifth IEEE International Conference on Data Mining (ICDM'05), 2005. |
| 19 | GOVER J C. A general coefficient of similarity and some of its properties[J]. Biometrics, 1971, 27(4). |
| 20 | CHEN Yiping, WANG Jingkang, LI Jonathan, et al. LiDAR-Video driving dataset: learning driving policies effectively[C]. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2018:5870-5878. |
| 21 | ALLISON E C, JESSICA H, MICHAEL J K, et al. Prevalence of teen driver errors leading to serious motor vehicle crashes[J]. Accident Analysis and Prevention, 2010, 43(4). |
| 22 | CLARA M M, MIRA H, WANG F Y, et al. Driving style recognition for intelligent vehicle control and advanced driver assistance: a survey[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(3):666-676. |
| 23 | ARANGANAYAGI S, THANGAVEL K. Clustering categorical data using silhouette coefficient as a relocating measure[C]. International Conference on Computational Intelligence and Multimedia Applications (ICCIMA 2007), 2007:13-17. |
| 24 | OLSEN E C B. Modeling slow lead vehicle lane changing[D]. Virginia Polytechnic Institute and State University, 2003. |
| 25 | 刘贵如, 周鸣争, 王陆林, 等. 城市工况下最小安全车距控制模型和避撞算法[J]. 汽车工程, 2016, 38(10):1200-1205,1176. |
| LIU G R, ZHOU M Z, WANG L L, et al. Control model for minimum safe inter-vehicle distance and collision avoidance algorithm in urban traffic condition[J]. Automotive Engineering, 2016, 38(10):1200-1205,1176. | |
| 26 | LI Jinghang, LU Chao, XU Youzhi, et al. Manifold learning for lane-changing behavior recognition in urban traffic[C]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC), 2019:3663-3668. |
| [1] | 杨彪, 韦智文, 倪蓉蓉, 王海, 蔡英凤, 杨长春. 基于动作条件交互的高效行人过街意图预测[J]. 汽车工程, 2024, 46(1): 29-38. |
| [2] | 陈吉清,李子涵,兰凤崇,蒋心平,潘威,陈继开. 基于非线性降维IC特征的实车电池SOH估计[J]. 汽车工程, 2023, 45(2): 199-208. |
| [3] | 姜俊昭,杨文豪,彭彬,郭婷,徐业凯,王国卓. 基于能耗加权策略的燃料电池汽车续驶里程预测[J]. 汽车工程, 2023, 45(12): 2357-2365. |
| [4] | 何智成,谢泽军,刘侃,周恩临,唐谦,黄元毅. 纯电动汽车传动系统-电机结构参数协同设计优化[J]. 汽车工程, 2023, 45(11): 2113-2122. |
| [5] | 廉玉波,凌和平,王钧斌,潘华,谢朝. 基于混合高斯-隐马尔可夫模型的动力电池实时热失控检测[J]. 汽车工程, 2023, 45(1): 139-146. |
| [6] | 赵健,李雅欣,佟静,朱冰,武维祥,孙博华,韩嘉懿. 基于车辆动力学响应特征的越野地面分类方法[J]. 汽车工程, 2022, 44(6): 909-918. |
| [7] | 黄晶,彭扬,黄烨,彭晓燕. 考虑噪声标签影响的驾驶员精神负荷状态评价[J]. 汽车工程, 2022, 44(5): 771-777. |
| [8] | 胡杰,朱雪玲,何陈,杨光宇. 基于实车数据的电动汽车电池健康状态预测[J]. 汽车工程, 2021, 43(9): 1291-1299. |
| [9] | 谢奕展,程夕明. 锂离子电池状态估计机器学习方法综述[J]. 汽车工程, 2021, 43(11): 1720-1729. |
| [10] | 胡杰,高志文. 基于数据驱动的电动汽车动力电池SOC预测[J]. 汽车工程, 2021, 43(1): 1-9. |
| [11] | 颜诗旋, 朱平, 刘钊. 基于改进LightGBM模型的汽车故障预测方法研究*[J]. 汽车工程, 2020, 42(6): 815-819. |
|