Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (8): 1228-1237.doi: 10.19562/j.chinasae.qcgc.2021.08.015
Previous Articles Next Articles
Xiaolong Zhang1,Kun Jiang1,Kai Sun2,Maolin Liu1,Zhenlei Shao2,Pengchuan Xiao2,Diange Yang1( )
)
Received:2021-02-25
Revised:2021-04-24
Online:2021-08-25
Published:2021-08-20
Contact:
Diange Yang
E-mail:ydg@mail.tsinghua.edu.cn
Xiaolong Zhang,Kun Jiang,Kai Sun,Maolin Liu,Zhenlei Shao,Pengchuan Xiao,Diange Yang. Intrinsic Parameters Modeling for LiDAR and Point Cloud Correction Method[J].Automotive Engineering, 2021, 43(8): 1228-1237.

"
"
| 时间 | 作者 | ||||||
|---|---|---|---|---|---|---|---|
| 2010 | Pandey[ | √ | √ | × | × | × | × |
| 2010 | Muhammad[ | √ | √ | √ | × | √ | √ |
| 2010 | Glennie[ | √ | √ | √ | √ | √ | √ |
| 2011 | Atanacio[ | √ | √ | √ | × | √ | √ |
| 2012 | Mirzaei[ | √ | √ | × | √ | √ | √ |
| 2012 | Chen[ | √ | √ | × | √ | √ | √ |
| 2013 | Zhu[ | √ | √ | √ | √ | √ | √ |
| 2013 | Chan[ | √ | √ | √ | × | × | × |
| 2016 | Nouira[ | √ | √ | √ | × | × | √ |
| 2017 | Bergelt[ | √ | √ | √ | √ | √ | √ |
"
"

"
"

"
"
"
"
"
"
| 线束 | ||
|---|---|---|
| 1 | 14.807 6 | -0.061 3 |
| 6 | 9.783 23 | -0.061 4 |
| 11 | 4.824 82 | -0.052 3 |
| 16 | 0.301 25 | -0.060 3 |
| 17 | -0.683 9 | -0.067 5 |
| 22 | -5.657 4 | -0.080 4 |
| 27 | -10.642 | -0.099 9 |
| 32 | -15.676 | -0.117 3 |
"
"
"

"
"
| 标定板 | 误差/mm | 距离/m | ||
|---|---|---|---|---|
| 无修正 | 角度修正 | 距离修正 | ||
| 1 | 14.950 091 | 4.595 796 | 4.595 825 | 3.088 4 |
| 2 | 8.417 082 | 6.708 674 | 6.710 810 | 0.681 8 |
| 3 | 12.224 109 | 5.371 252 | 5.371 180 | 7.532 2 |
| 4 | 11.119 527 | 6.157 632 | 6.157 584 | 10.120 4 |
| 5 | 7.231 133 | 6.950 977 | 6.950 979 | 8.294 8 |
"
| 序列 | 距离/m | 时长/s | 场景 |
|---|---|---|---|
| 1 | 725.341 | 130 | 郊区公路 |
| 2 | 904.852 | 145 | 商业区 |
| 3 | 721.770 | 150 | 商业区 |

"

"
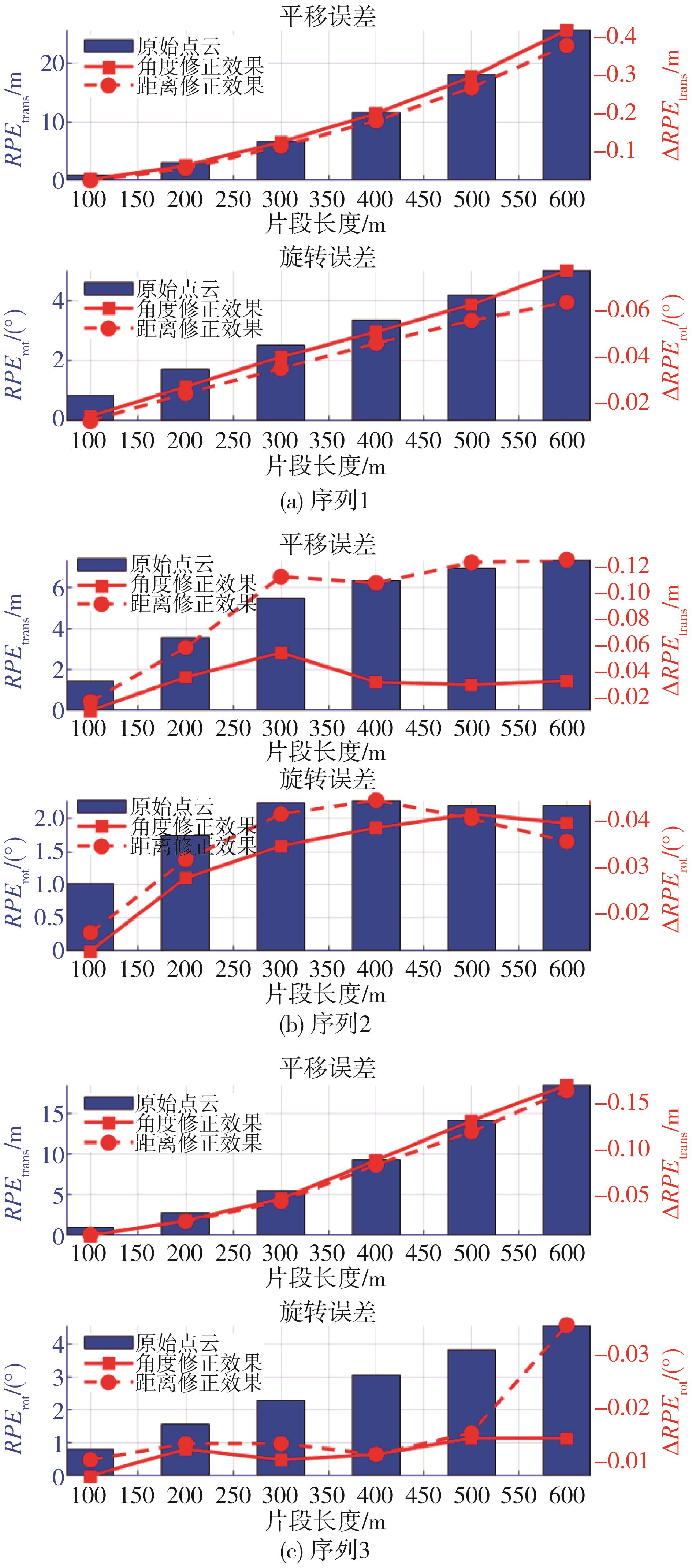
| 序列 | 修正方式 | ||
|---|---|---|---|
| 1 | 原始点云 | 14.060 | 3.258 |
| 角度修正 | 13.845 | 3.212 | |
| 距离修正 | 13.853 | 3.214 | |
| 2 | 原始点云 | 9.533 | 2.741 |
| 角度修正 | 9.450 | 2.686 | |
| 距离修正 | 9.326 | 2.690 | |
| 3 | 原始点云 | 5.531 | 1.950 |
| 角度修正 | 5.450 | 1.916 | |
| 距离修正 | 5.474 | 1.922 |

"
"
| 序列 | 修正方式 | ||
|---|---|---|---|
| 1 | 原始点云 | 2.566 | 0.846 |
| 角度修正 | 2.524 | 0.833 | |
| 距离修正 | 2.529 | 0.835 | |
| 2 | 原始点云 | 1.540 | 0.666 |
| 角度修正 | 1.530 | 0.656 | |
| 距离修正 | 1.515 | 0.655 | |
| 3 | 原始点云 | 2.072 | 0.772 |
| 角度修正 | 2.055 | 0.768 | |
| 距离修正 | 2.056 | 0.766 |
"
"
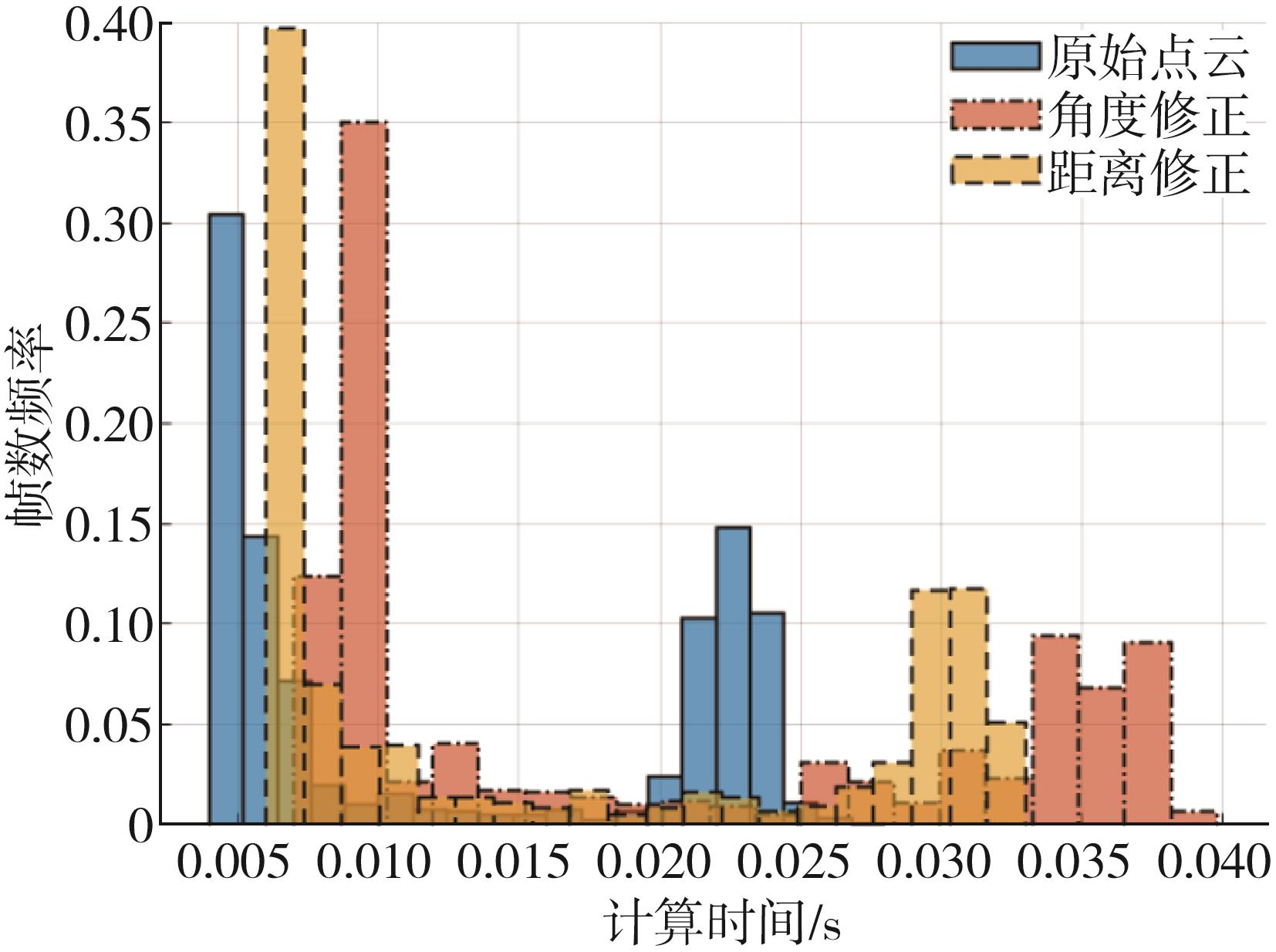
| 处理时间/s | 原始点云 | 角度修正 | 距离修正 |
|---|---|---|---|
| 最小值 | 0.004 417 | 0.007 857 | 0.006 129 |
| 最大值 | 0.027 911 | 0.039 759 | 0.032 850 |
| 平均值 | 0.012 734 | 0.019 324 | 0.016 343 |
| 1 | RESHETYUK Y. Investigation and calibration of pulsed time⁃of⁃flight terrestrial laser scanners[D]. Stockholm: Royal Institute of Technology, 2006. |
| 2 | 《中国公路学报》编辑部. 中国汽车工程学术研究综述·2017[J]. 中国公路学报, 2017, 30(6): 1-197. |
| Editorial Department of China Journal of Highway and Transport. Review on China’s automotive engineering research progress: 2017[J]. China Journal of Highway and Transport, 2017, 30(6): 1-197. | |
| 3 | 陈敬业, 时尧成. 固态激光雷达研究进展[J]. 光电工程, 2019, 46(7): 47-57. |
| CHEN J Y, SHI Y C. Research progress in solid⁃state LiDAR[J]. Opto⁃Electronic Engineering, 2019, 46(7): 47-57. | |
| 4 | MUHAMMAD N, LACROIX S. Calibration of a rotating multi⁃beam lidar[C].2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2010. |
| 5 | CHEN C Y, CHIEN H J. On⁃site sensor recalibration of a spinning multi⁃beam LiDAR system using automatically⁃detected planar targets[J]. Sensors, 2012, 12(10): 13736-13752. |
| 6 | LEVINSON J, THRUN S. Unsupervised calibration for multi⁃beam lasers[M]// Experimental Robotics. Springer Berlin Heidelberg, 2014. |
| 7 | HUANG J K, FENG C X, ACHAR M, et al. Global unifying intrinsic calibration for spinning and solid⁃state LiDARs[J]. ArXiv, 2020, 2012.03321. |
| 8 | GLENNIE C, LICHTI D D. Static calibration and analysis of the velodyne HDL⁃64E S2 for high accuracy mobile scanning[J]. Remote Sensing, MDPI AG, 2010, 2(6): 1610–1624. |
| 9 | PANDEY G, MCBRIDE J, SAVARESE S, et al. Extrinsic calibration of a 3D laser scanner and an omnidirectional camera[J]. IFAC Proceedings Volumes, 2010, 43(16): 336-341. |
| 10 | ATANACIO⁃JIMENEZ G, GONZALEZ⁃BARBOSA J J, HURTADO⁃RAMOS J B, et al. LiDAR velodyne HDL⁃64e calibration using pattern planes[J]. International Journal of Advanced Robotic Systems, 2011, 8(5). |
| 11 | MIRZAEI F M, KOTTAS D G, ROUMELIOTIS S I. 3D LiDAR⁃camera intrinsic and extrinsic calibration: identifiability and analytical least⁃squares⁃based initialization[J]. International Journal of Robotics Research, 2012, 31(4):452-467. |
| 12 | CHEN C Y, CHEIN H J, HUANG P S, et al. Intrinsic parameters calibration for multi⁃beam LiDAR using the levenberg⁃marquardt algorithm[C]. Proceedings of the 27th Conference on Image and Vision Computing. New York: Association for Computing Machinery, 2012: 19-24. |
| 13 | ZHU Z, LIU J L. Calibration of a multi⁃beam LiDAR by using linear instrumental error model[J]. Applied Mechanics and Materials, 2013: 380-384. |
| 14 | CHAN T O, LICHTI D D, BELTON D. Temporal analysis and automatic calibration of the velodyne HDL⁃32E LiDAR system[J]. Political Studies, 2013, II⁃5/W2(4):61-66. |
| 15 | NOUIRA H, DESCHAUD J E, GOULETTE F. Point cloud refinement with a target⁃free intrinsic calibration of a mobile multi⁃beam LiDAR system[J]. ISPRS⁃International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2016, XLI⁃B3: 359-366. |
| 16 | BERGELT R, KHAN O, HARDT W. Improving the intrinsic calibration of a velodyne LiDAR sensor[C]. IEEE SENSORS 2017. IEEE, 2017. |
| 17 | LIU J, XIAO J H, CAO H J, et al. The status and challenges of high precision map for automated driving[C]. China Satellite Navigation Conference (CSNC) 2019 Proceedings. Singapore: Springer Singapore, 2019: 266-276. |
| 18 | LIU R, WANG J, ZHANG B. High definition map for automated driving: overview and analysis[J]. Journal of Navigation, 2019, 73(2):1-18. |
| 19 | 高翔, 张涛, 刘毅, 等. 视觉SLAM十四讲[M]. 北京: 电子工业出版社, 2019. |
| GAO X, ZHANG T, LIU Y, et al. 14 Lectures on visual SLAM: from theory to practice[M]. Beijing: Publishing House of Electronics Industry, 2019. | |
| 20 | CADENA C, CARLONE L, CARRILLO H, et al. Simultaneous localization and mapping: present, future, and the robust⁃perception age[J]. ArXiv, 2016, 1606.05830. |
| 21 | ZHANG J, SINGH S. LOAM: lidar odometry and mapping in real-time[C]. Robotics: Science and Systems Conference, 2014. |
| 22 | ZHANG J, SINGH S. Low⁃drift and real⁃time lidar odometry and mapping[J]. Autonomous Robots, 2017, 41(2): 401-416. |
| 23 | SHAN T X, ENGLOT B. LeGO⁃LOAM: lightweight and ground⁃optimized lidar odometry and mapping on variable terrain[C]. |
| 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018: 4758-4765. | |
| 24 | TORR P H S, ZISSERMAN A. MLESAC: a new robust estimator with application to estimating image geometry[J]. Computer Vision and Image Understanding, 2000, 78(1): 138-156. |
| 25 | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? the KITTI vision benchmark suite[C]. IEEE Conference on Computer Vision & Pattern Recognition. IEEE, 2012. |
| [1] | Wenguang Wu,Shuangyue Tian,Zhiyong Zhang,Bin Jin,Zenghua Qiu. Research on Surface Geometry Parameter Recognition and Model Reconstruction of Uneven Road [J]. Automotive Engineering, 2023, 45(2): 273-284. |
| [2] | Runhui Huang,Likun Hu,Mingfang Su,Daye Xu,Aoran Chen. Semantic Segmentation Method of LiDAR Point Cloud Based on 3D Conical Grid [J]. Automotive Engineering, 2022, 44(8): 1173-1182. |
| [3] | Hai Wang,Yang Li,Yingfeng Cai,Kai Sun,Long Chen. 3D Real⁃Time Vehicle Tracking Based on Lidar [J]. Automotive Engineering, 2021, 43(7): 1013-1021. |
| [4] | Zhangpeng Gong,Guoye Wang,Shi Yu. The Algorithm of Multi⁃Category Object Recognition in Road Scene Based on Voxel Network [J]. Automotive Engineering, 2021, 43(4): 469-477. |
| [5] | Yutao Luo,Han Qin. 3D Object Detection Method for Autonomous Vehicle Based on Sparse Color Point Cloud [J]. Automotive Engineering, 2021, 43(4): 492-500. |
| [6] | Wuhua Jiang,Songlin Zhou,Qidong Wang,Wuwei Chen,Jiajia Chen. Research on Curb Detection and Tracking Method Based on Adaptive Multi-feature Fusion [J]. Automotive Engineering, 2021, 43(12): 1762-1770. |
| [7] | Zhiguo Zhao,Peng Wang,Xiaorong Chen,Kaichong Liang. Obstacle Tracking of a Lidar-equipped Vehicle in Turning for Collision Avoidance [J]. Automotive Engineering, 2021, 43(11): 1611-1619. |
| [8] | Xu Guoyan, Niu Huan, Guo Chenyang, Su Hongjie. Research on Target Recognition and Tracking Based on 3D Laser Point Cloud [J]. Automotive Engineering, 2020, 42(1): 38-46. |
| [9] | Lou Xinyu, Wang Hai, Cai Yingfeng, Zheng Zhengyang , Chen Long. A Research on an Algorithm for Real-time Detection and Classification of Road Obstacle by Using 64-line Lidar [J]. Automotive Engineering, 2019, 41(7): 779-754. |
| [10] | Fan Jingjing, Wang Li, Chu Wenbo, Luo Yugong. Research on Pedestrian Recognition in Cross-country Environment Based on KDTree and Euclidean Clustering [J]. Automotive Engineering, 2019, 41(12): 1410-1415. |
|