Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (7): 1200-1211.doi: 10.19562/j.chinasae.qcgc.2023.07.011
Special Issue: 底盘&动力学&整车性能专题2023年
Previous Articles Next Articles
Xiao Wu,Wenku Shi,Zhiyong Chen( )
)
Received:2023-01-03
Revised:2023-02-16
Online:2023-07-25
Published:2023-07-25
Contact:
Zhiyong Chen
E-mail:chen_zy@jlu.edu.cn
Xiao Wu, Wenku Shi, Zhiyong Chen. Active Suspension Control Based on Interacting Multiple Model Kalman Filter[J].Automotive Engineering, 2023, 45(7): 1200-1211.
"

"
"
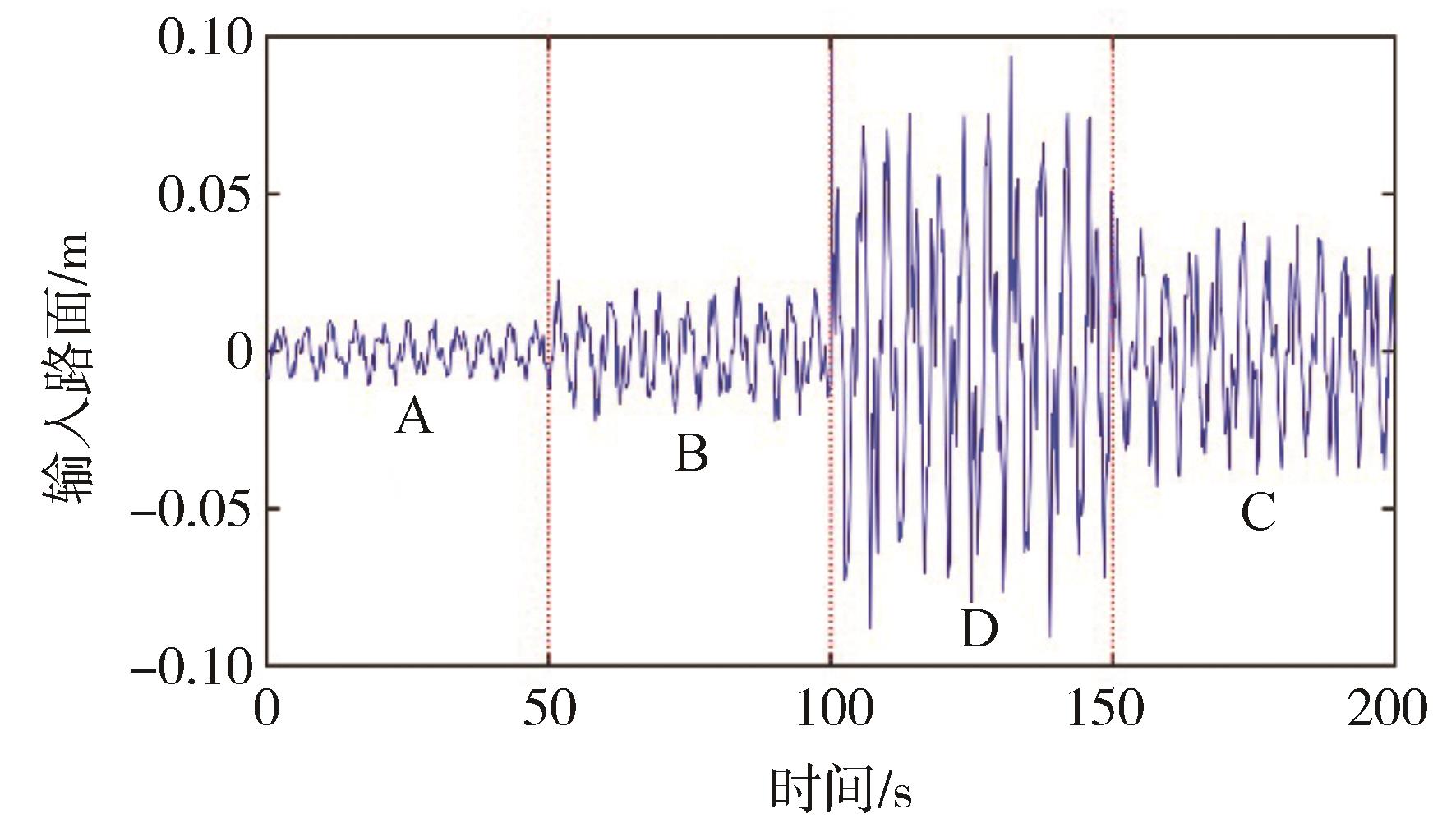
| 参数 | 单位 | 取值 |
|---|---|---|
簧上质量 簧下质量 悬架刚度 轮胎刚度 车速 | kg kg N/m N/m m/s | 240 30 16 000 160 000 20 |

"

"
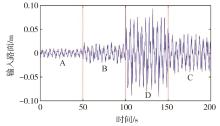
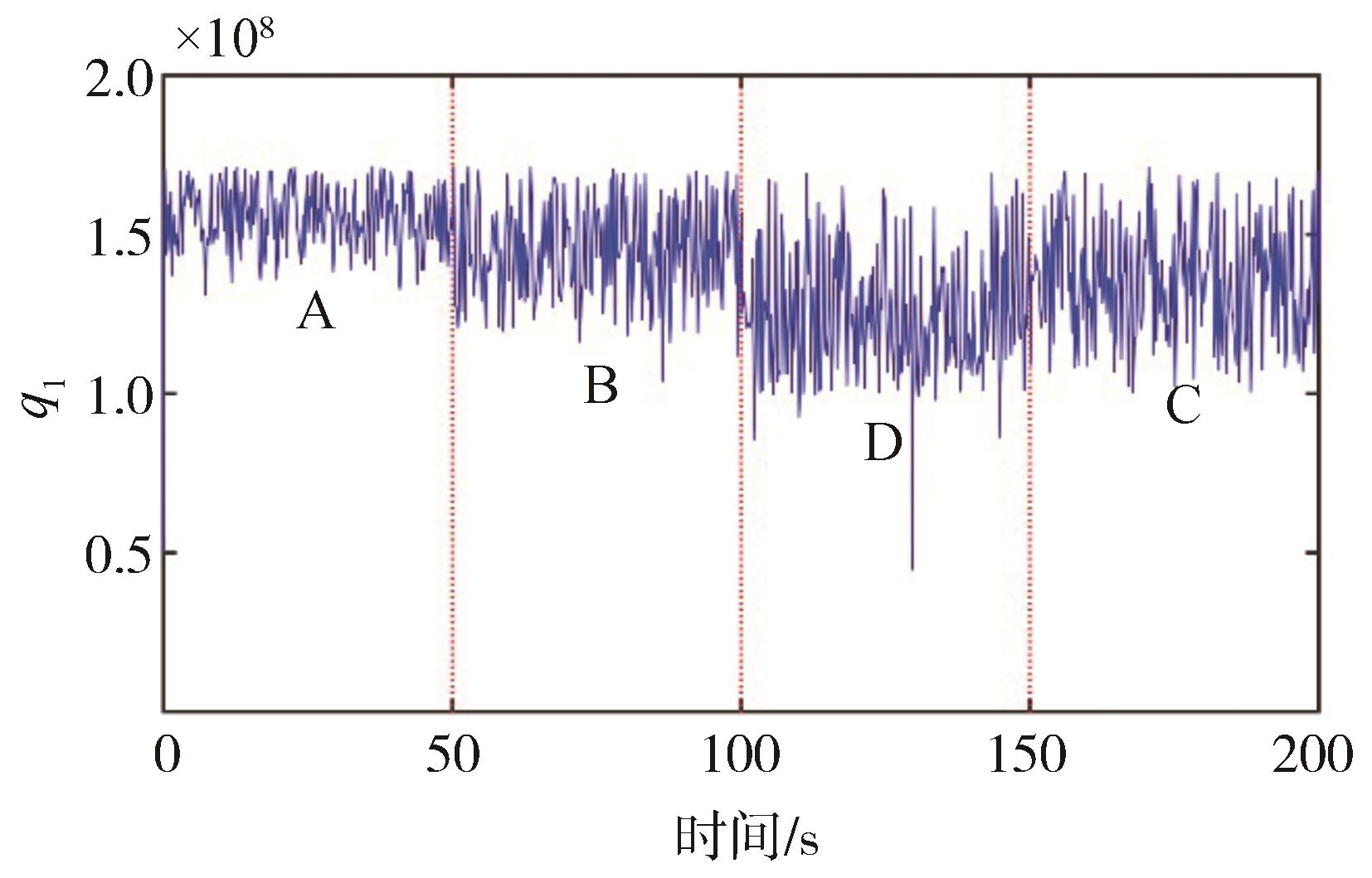
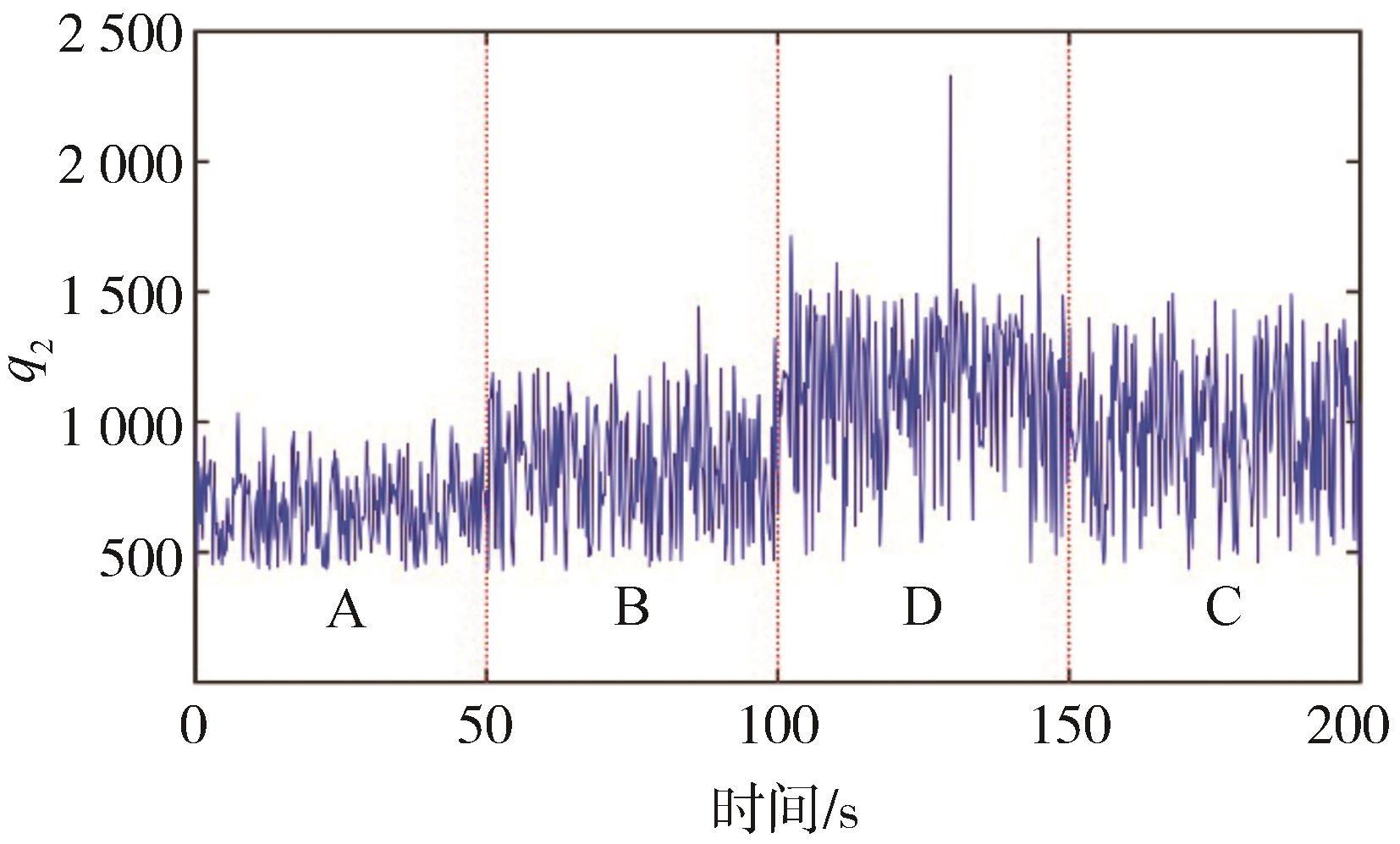
| 路面等级 | A | B | C | D |
|---|---|---|---|---|
| 1 | 64 | 256 | 1 024 | |
| 1.543 8 | 1.476 5 | 1.361 6 | 1.264 6 | |
| 678 | 805 | 957 | 1 103 | |
| 0.000 1 | ||||
"
"
"
"
"
"
"
"
"
| 项目 | A | B | C | D |
|---|---|---|---|---|
| 0.307 9 | 0.631 0 | 1.060 7 | 1.692 9 | |
| 0.003 3 | 0.008 5 | 0.019 0 | 0.039 2 | |
| 0.011 2 | 0.022 3 | 0.058 0 | 0.120 9 | |
| 0.000 7 | 0.001 7 | 0.003 3 | 0.006 2 |
"
"
"
"
| 观测量 | 模型 | A | B | D | C |
|---|---|---|---|---|---|
| IMMKF14 | 10.25 | 11.98 | 18.61 | 16.63 | |
| IMMKF7 | 22.71 | 14.79 | 18.34 | 16.71 | |
| IMMKF4 | 48.51 | 24.43 | 21.15 | 19.73 | |
| KF A | 63.79 | 36.24 | 38.06 | 37.98 | |
| KF C | 70.17 | 46.06 | 25.33 | 27.62 | |
| IMMKF14 | 3.40 | 1.69 | 0.32 | 0.58 | |
| IMMKF7 | 10.40 | 7.15 | 2.33 | 3.89 | |
| IMMKF4 | 21.56 | 13.30 | 5.00 | 7.98 | |
| KF A | 29.60 | 23.56 | 17.52 | 19.44 | |
| KF C | 34.65 | 20.90 | 6.82 | 12.32 | |
| IMMKF14 | 15.91 | 17.38 | 16.01 | 12.65 | |
| IMMKF7 | 18.86 | 18.03 | 16.75 | 13.27 | |
| IMMKF4 | 30.29 | 21.78 | 17.81 | 13.99 | |
| KF A | 41.48 | 32.61 | 35.49 | 31.56 | |
| KF C | 61.41 | 31.91 | 21.34 | 18.15 | |
| IMMKF14 | 4.09 | 1.93 | 3.19 | 2.87 | |
| IMMKF7 | 22.63 | 7.13 | 4.12 | 4.93 | |
| IMMKF4 | 66.79 | 16.54 | 6.81 | 13.14 | |
| KF A | 98.71 | 32.34 | 18.20 | 28.75 | |
| KF C | 70.99 | 34.50 | 11.61 | 26.33 |
"
| 观测量 | 模型 | A | B | C |
|---|---|---|---|---|
| IMMKF14 | 3.40 | 1.69 | 0.58 | |
| AUKF | 5.00 | 7.00 | 9.00 | |
| UKF | 13.00 | 16.00 | 20.00 | |
| IMMKF14 | 4.09 | 1.93 | 2.87 | |
| AUKF | 6.00 | 10.00 | 10.00 | |
| UKF | 15.00 | 18.00 | 22.22 |
"
"
"
"
"
"
"
"
| 采样步数 | 模型 | A | B | C | D |
|---|---|---|---|---|---|
| 1 | IMMKF14 | 81.00 | 83.00 | 95.00 | 70.50 |
| IMMKF7 | 60.50 | 42.00 | 77.00 | 35.50 | |
| IMMKF4 | 84.50 | 83.00 | 96.50 | 67.50 | |
| 10 | IMMKF14 | 95.00 | 90.00 | 100.00 | 90.00 |
| IMMKF7 | 65.00 | 55.00 | 90.00 | 45.00 | |
| IMMKF4 | 90.00 | 85.00 | 100.00 | 70.00 | |
| 20 | IMMKF14 | 100.00 | 100.00 | 100.00 | 90.00 |
| IMMKF7 | 60.00 | 50.00 | 100.00 | 60.00 | |
| IMMKF4 | 100.00 | 90.00 | 100.00 | 80.00 |
"
"
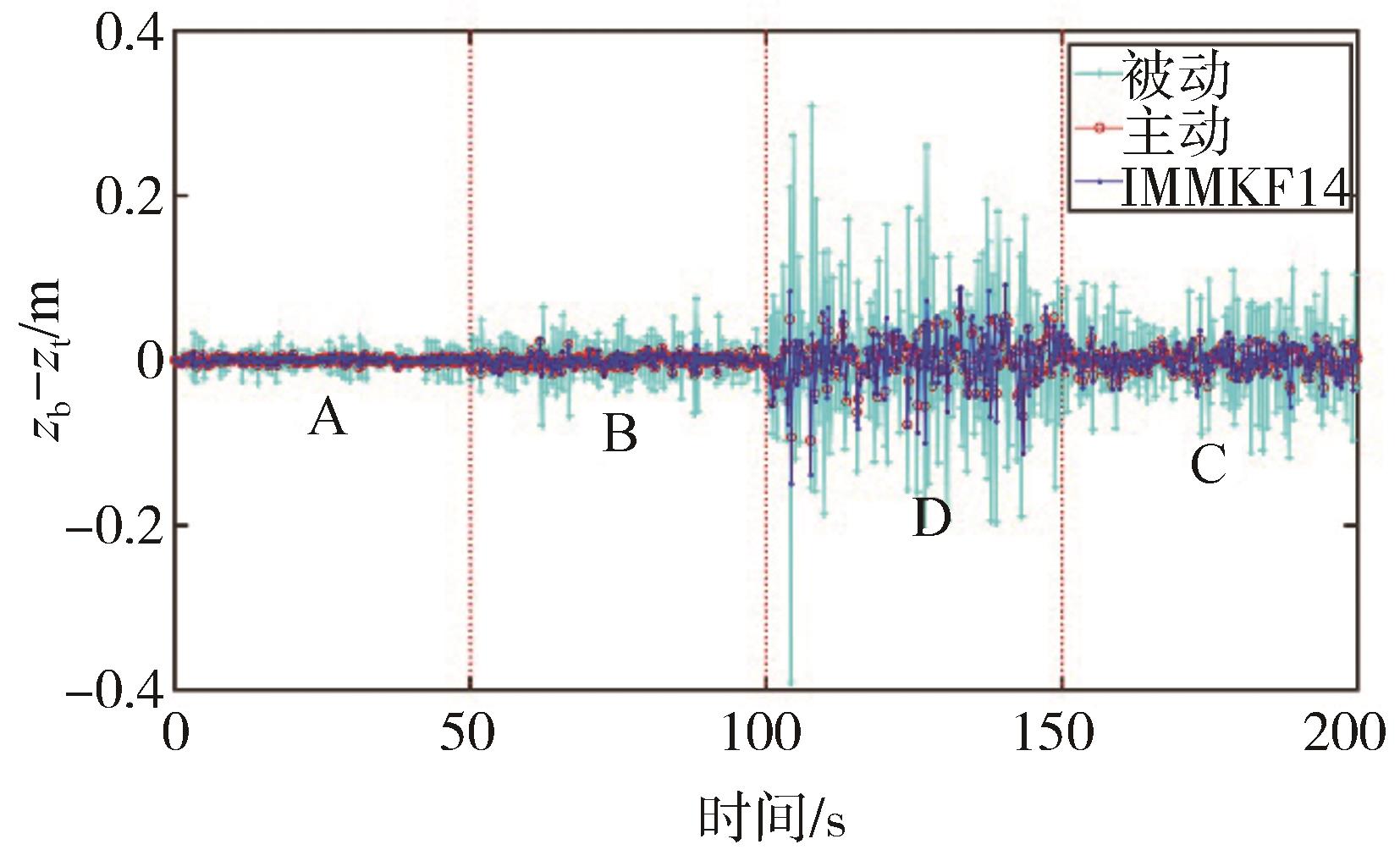
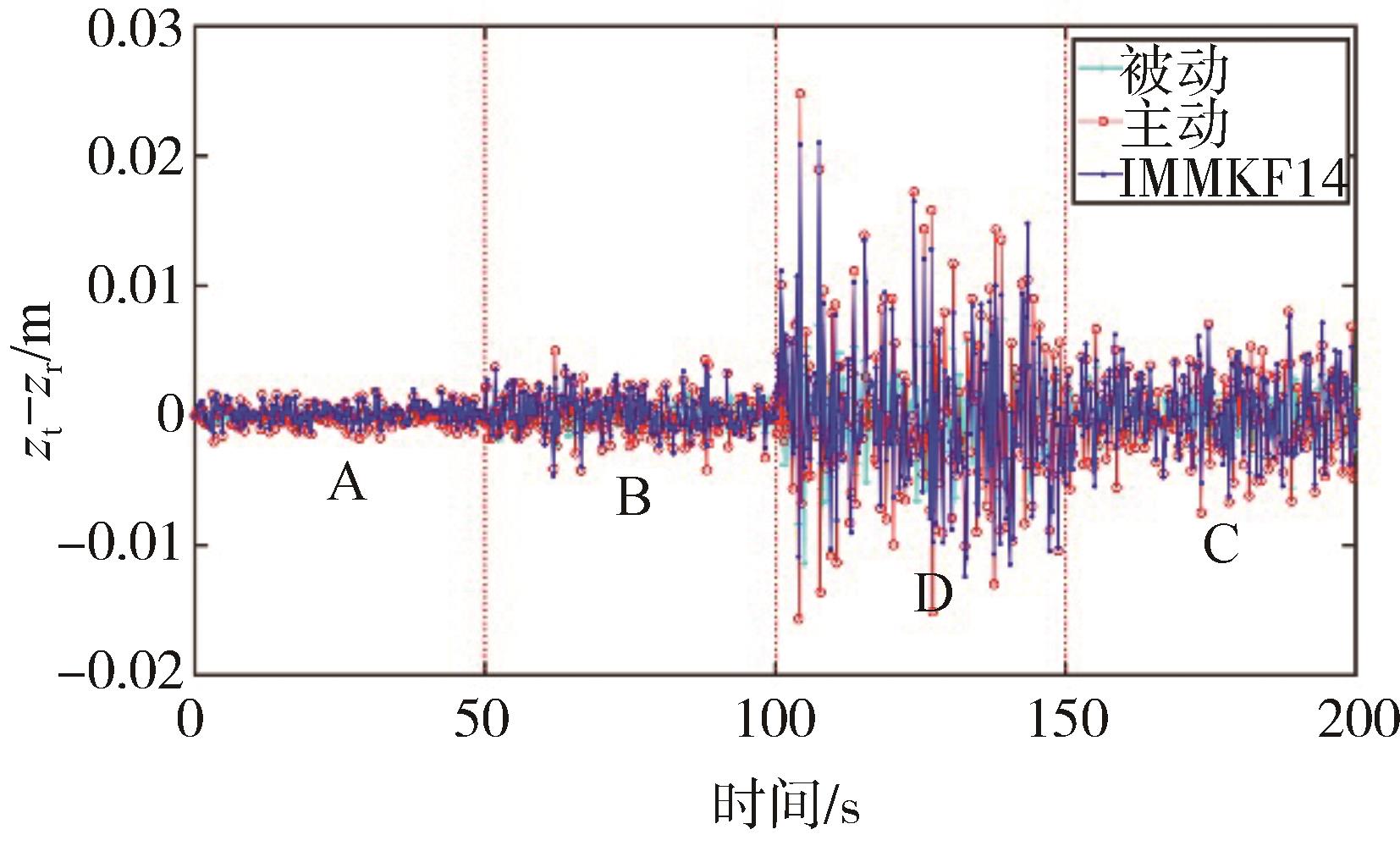
| 输出量 | 模型 | A | B | D | C |
|---|---|---|---|---|---|
| 被动 | 0.733 9 | 1.484 8 | 5.892 7 | 2.788 8 | |
| 主动 | 0.320 4 | 0.652 7 | 2.677 2 | 1.247 5 | |
| IMMKF | 0.286 2 | 0.483 5 | 1.414 7 | 0.800 3 | |
| 被动 | 0.012 1 | 0.024 6 | 0.097 8 | 0.047 0 | |
| 主动 | 0.003 4 | 0.006 8 | 0.027 5 | 0.013 4 | |
| IMMKF | 0.003 3 | 0.007 4 | 0.038 0 | 0.016 5 | |
| 被动 | 0.000 4 | 0.000 8 | 0.003 2 | 0.001 7 | |
| 主动 | 0.000 8 | 0.001 6 | 0.006 4 | 0.003 0 | |
| IMMKF | 0.000 7 | 0.001 4 | 0.005 9 | 0.002 8 |
"
"
"
"
| 编号 | ||||
|---|---|---|---|---|
1.600 7 1.582 2 1.556 6 1.525 2 1.516 3 1.496 4 1.457 5 1.435 1 1.413 1 1.393 9 1.344 7 1.314 2 1.302 9 1.286 9 1.243 8 1.217 9 1.174 1 | 597 625 664 711 724 754 812 846 879 908 981 1 027 1 044 1 068 1 133 1 172 1 237 | 0.041 8 0.055 2 0.069 8 0.083 1 0.094 4 0.105 1 0.128 4 0.169 8 0.194 6 0.216 5 0.275 7 0.345 2 0.382 7 0.432 9 0.570 8 0.678 7 0.862 4 |
| 1 | BAGHERI A, REZAEE M, HASHEMI S M. Genetic algorithm based optimization of model reference adaptive control approach for a vehicle active suspension system[C]. 3rd Industrial Simulation Conference 2005, Fraunhofer-IPK, Berlin, Germany, Jun 09-11. Fraunhofer-IPK, Berlin, Germany, 2005: 211-215. |
| 2 | PANG H, ZHANG X, YANG J J, et al. Adaptive backstepping-based control design for uncertain nonlinear active suspension system with input delay[J]. International Journal of Robust and Nonlinear Control, 2019, 29 (16): 5781-5800. |
| 3 | ZHENG X Y, ZHANG H, YAN H C, et al. Active full-vehicle suspension control via cloud-aided adaptive backstepping approach[J]. IEEE Transactions on Cybernetics, 2020, 50 (7): 3113-3124. |
| 4 | YI K S, SONG B S. Observer design for semi-active suspension control[J]. Vehicle System Dynamics, 1999, 32 (2-3): 129-148. |
| 5 | DU M M, ZHAO D X, YANG M K, et al. Nonlinear extended state observer-based output feedback stabilization control for uncertain nonlinear half-car active suspension systems[J]. Nonlinear Dynamics, 2020, 100 (3): 2483-2503. |
| 6 | WANG T P, CHEN S Z, REN H B, et al. State estimation and damping control for unmanned ground vehicles with semi-active suspension system[J]. Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering, 2020, 234 (5): 1361-1376. |
| 7 | WANG K Y, HE R, LI H, et al. Observer-based control for active suspension system with time-varying delay and uncertainty[J]. Advances in Mechanical Engineering, 2019, 11 (11). |
| 8 | YI K S, SONG B S. Observer design for semi-active suspension control[J]. Vehicle System Dynamics, 1999, 32 (2-3): 129-148. |
| 9 | WANG Z F, DONG M M, QIN Y C, et al. Suspension system state estimation using adaptive Kalman filtering based on road classification[J]. Vehicle System Dynamics, 2017, 55 (3): 371-398. |
| 10 | WANG T C, LI Y M. Neural-network adaptive output-feedback saturation control for uncertain active suspension systems[J]. IEEE Transactions on Cybernetics, 2022, 52 (3): 1881-1890. |
| 11 | WANG Z F, QIN Y C, GU L, et al. Vehicle system state estimation based on adaptive unscented Kalman filtering combing with road classification[J]. IEEE Access, 2017, 5: 27786-27799. |
| 12 | ZHANG Z P, XU N, CHEN H, et al. State observers for suspension systems with interacting multiple model unscented Kalman filter subject to markovian switching[J]. International Journal of Automotive Technology, 2021, 22 (6): 1459-1473. |
| 13 | KAVIANIPOUR O, MONTAZERI-GH M, MOAZAMIZADEH M. Road profile measurement using the two degrees of freedom response-type mechanism[J]. Proceedings of the Institution of Mechanical Engineers Part C: Journal of Mechanical Engineering Science, 2015, 229 (6): 1074-1087. |
| 14 | IMINE H, FRIDMAN L. Road profile estimation in heavy vehicle dynamics simulation[J]. International Journal of Vehicle Design, 2008, 47 (1-4): 234-249. |
| 15 | MOTAMEDI M, TAHERI S, SANDU C, et al. Characterization of road profiles based on fractal properties and contact mechanics[J]. Rubber Chemistry and Technology, 2017, 90 (2): 405-427. |
| 16 | YOUSEFZADEH M, AZADI S, SOLTANI A. Road profile estimation using neural network algorithm[J]. Journal of Mechanical Science and Technology, 2010, 24 (3): 743-754. |
| 17 | ZHANG D J, XU X, LIN H, et al. Automatic road-marking detection and measurement from laser-scanning 3D profile data[J]. Automation in Construction, 2019, 108. |
| 18 | LEE J H, LEE S H, KANG D K, et al. Development of a 3D road profile measuring system for unpaved road severity analysis[J]. International Journal of Precision Engineering and Manufacturing, 2017, 18 (2): 155-162. |
| 19 | QIN Y C, LANGARI R, GU L. The use of vehicle dynamic response to estimate road profile input in time domain[C]. ASME 7th Annual Dynamic Systems and Control Conference, San Antonio, TX, Oct 22-24. San Antonio, TX, 2014. |
| 20 | QIN Y C, DONG M M, LANGARI R, et al. Adaptive hybrid control of vehicle semiactive suspension based on road profile estimation[J]. Shock and Vibration, 2015, 2015. |
| 21 | CHEN S, XUE J J. Road roughness level identification based on BiGRU network[J]. IEEE Access, 2022, 10: 32696-32705. |
| 22 | LIU Y J, CUI D W. Research on road roughness based on NARX neural network[J]. Mathematical Problems in Engineering, 2021, 2021. |
| 23 | ZHANG Q X, HOU J L, HU X Y, et al. Vehicle parameter identification and road roughness estimation using vehicle responses measured in field tests[J]. Measurement, 2022, 199. |
| 24 | BOTSHEKAN M, ASAADI E, ROXON J, et al. Smartphone-enabled road condition monitoring: from accelerations to road roughness and excess energy dissipation[J]. Proceedings of the Royal Society A-Mathematical Physical and Engineering Sciences, 2021, 477 (2246). |
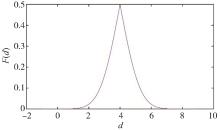
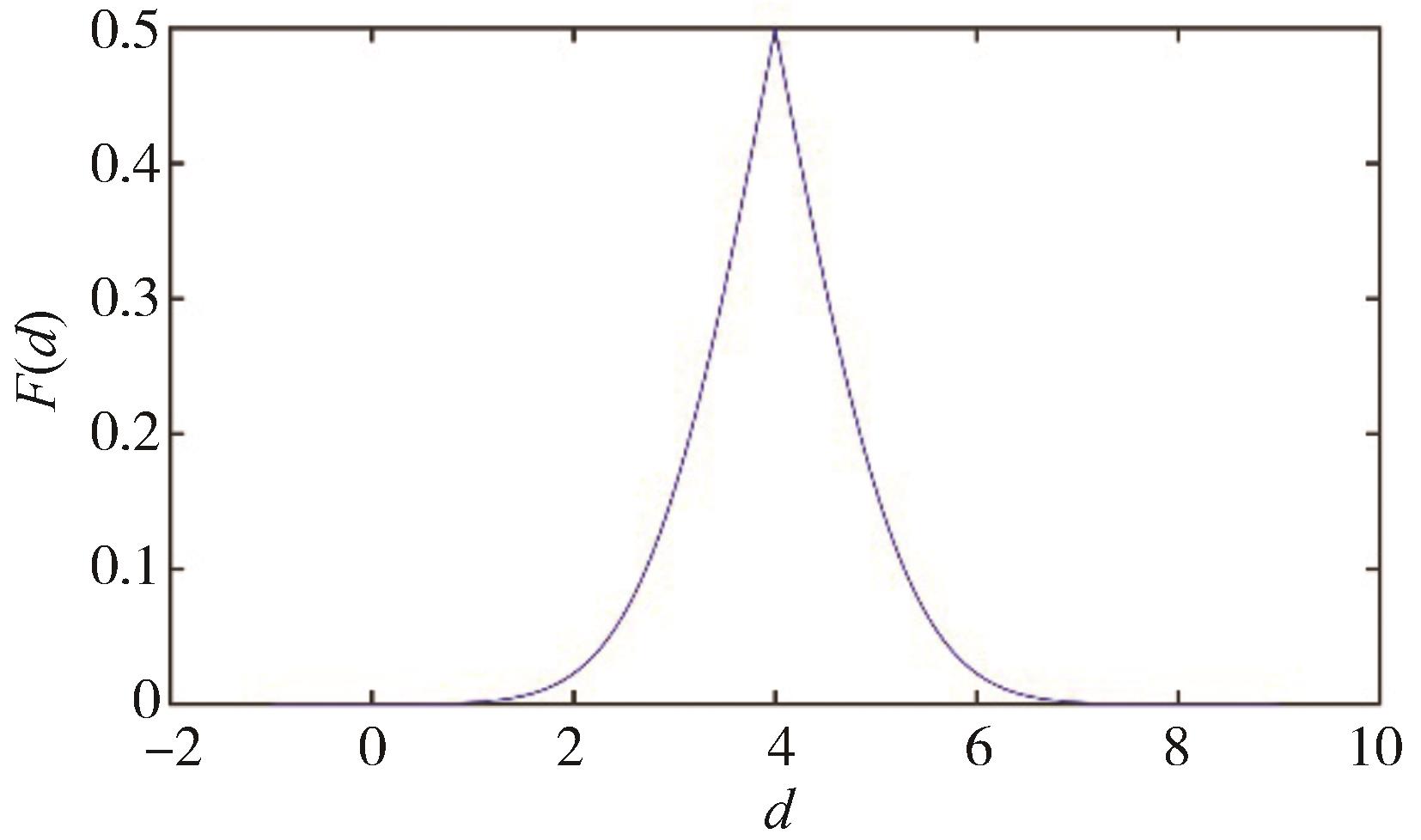
| 25 | HUANG W J, SU N C. A study of generalized normal distributions[J]. Communications in Statistics-Theory and Methods, 2017, 46 (11):5612-5632. |
| [1] | Yunfei Zha,Xiaoshan Shi,Hao Wu,Minxu Li,Huiqin Chen. Study of Vehicle Aerodynamics Characteristic Based on Active Tilting Rear Wing [J]. Automotive Engineering, 2023, 45(3): 489-500. |
| [2] | Jinxia Liu,Zhihao Liang,Qiang Wang,Mingxing Wen. Research on the Equivalent Fuel Consumption Minimizing Energy Management Strategy of Through-the-Road Vehicle [J]. Automotive Engineering, 2023, 45(2): 285-292. |
| [3] | Shiju Pan,Yongle Li,Zixian Li,Binbing He,Yuan Zhu,Youchun Xu. Path Following Method of Intelligent Vehicles Based on Improved Pure Tracking [J]. Automotive Engineering, 2023, 45(1): 1-8. |
| [4] | Yongtao Liu,Chuanpan Liu,Xiangan Liu,Yisong Chen,Jie Qiao. Automatic Emergency Braking System Based on Model Predictive Control with Adaptive Sampling Time [J]. Automotive Engineering, 2023, 45(1): 32-41. |
| [5] | Xuebing Yin,Yong Chen,Qinglin Dai,Hai Liu,Naili Tian,Bolin He. Study on Shift Schedule of 2DCT for Pure Electric Vehicle Based on NSGA-Ⅱ Algorithm and Fuzzy Control [J]. Automotive Engineering, 2022, 44(10): 1571-1580. |
| [6] | Xiangjing Guo,Pan Sun,Jie Deng,Yong Liu,Zhuang Liu,Shuangping Liu. Research on AEB Control Strategy of a Heavy Tractor-Semitrailer Combination Based on BP Neural Network Algorithm Prediction [J]. Automotive Engineering, 2021, 43(9): 1350-1359. |
| [7] | Peng Bo, Li Junqiu, Sun Fengchun, Zhu Xuebin, Wan Cuncai. Research on Differential Drive Steering Control Strategy for Rear Axles of Multi-Axle Distributed Electric Drive Vehicle [J]. Automotive Engineering, 2020, 42(7): 909-916. |
| [8] | Wang Hongchao, Shan Xizhuang, Yang Zhigang. Study on Fuzzy Control of Cooling System with Matrix Fans [J]. Automotive Engineering, 2020, 42(3): 345-352. |
| [9] | Zhang Bingli, Li Zilong, Shen Gan, Fang Tao, Cao Congcong, Zheng Pingping. A Research on Path Tracking of Intelligent Vehicle Based on Fuzzy Neural Network [J]. Automotive Engineering, 2019, 41(8): 953-959. |
| [10] | Yao Dizhao, Xie Changjun, Zeng Tian, Huang Liang. Multi-Fuzzy Control Based Energy Management Strategy ofBattery/Super-capacitor Hybrid Energy System of Electric Vehicles [J]. Automotive Engineering, 2019, 41(6): 615-624. |
| [11] | Wang Feng, Luo Yutao. A Research on Power Splitting Strategy for Hybrid Energy Storage System Based on Driving Condition Prediction [J]. Automotive Engineering, 2019, 41(11): 1251-1257. |
| [12] | Niu Jigao, Niu Dantong, Xu Chunhua & Pei Fenglai. A Research on Optimal Curve Fuzzy Control Strategy for ExtendedRange Electric Vehicles [J]. , 2018, 40(7): 757-. |
| [13] | Wang Juncheng & He Ren. Nonlinear Optimal Sliding Mode Fuzzy Control for InWheel Active Vibration Damper of Electric Wheel [J]. , 2018, 40(6): 719-. |
| [14] | Chen Xinbo, Luo Jie, Hang Peng, Fang Shude, Luo Fengmei. Adaptive Fuzzy Sliding Mode Control for a Novel Steering by wire System [J]. , 2018, 40(5): 568-574. |