Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (1): 32-41.doi: 10.19562/j.chinasae.qcgc.2023.01.004
Special Issue: 智能网联汽车技术专题-控制2023年
Previous Articles Next Articles
Yongtao Liu1,2,Chuanpan Liu1,Xiangan Liu1,Yisong Chen1,Jie Qiao1( )
)
Received:2022-07-12
Revised:2022-08-19
Online:2023-01-25
Published:2023-01-18
Contact:
Jie Qiao
E-mail:qiaojie@chd.edu.cn
Yongtao Liu,Chuanpan Liu,Xiangan Liu,Yisong Chen,Jie Qiao. Automatic Emergency Braking System Based on Model Predictive Control with Adaptive Sampling Time[J].Automotive Engineering, 2023, 45(1): 32-41.
"
"
"
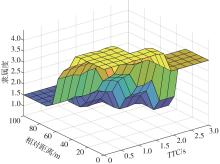
| 紧急系数 | TTC/s | |||||
|---|---|---|---|---|---|---|
| NB | NS | ZO | PS | PB | ||
| 相对距离/m | NB | PB | PB | PB | PS | PS |
| NS | PB | PB | PS | PS | PS | |
| ZO | PS | PS | ZO | NS | NB | |
| PS | NS | NS | NS | NB | NB | |
| PB | NS | NS | NB | NB | NB | |
"
"
| 参数 | 数值 |
|---|---|
| 整车质量 | 1 650 |
| 转动惯量 | 3 269、2 884、173 |
| 质心距前轴距离 | 1.16 |
| 质心距后轴距离 | 1.74 |
| 轴距 | 2.9 |
| 车宽 | 1.548 |
| 质心高度 | 0.71 |
| 轮胎半径 | 0.32 |
| 最大制动力 | 15 |
| 空气阻力系数 | 0.33 |
"

"
"
| 场景 | 本车速度/(km·h-1) | 前车速度/(km·h-1) | 初始间距/m |
|---|---|---|---|
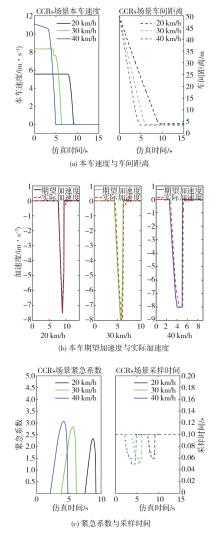
| CCRs | 20 | 0 | 50 |
| 30 | 0 | 50 | |
| 40 | 0 | 50 | |
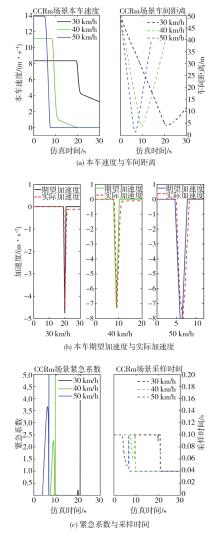
| CCRm | 30 | 20 | 50 |
| 40 | 20 | 50 | |
| 50 | 20 | 50 |
"

"


"

"

| 1 | 国家统计局.中华人民共和国道路交通事故统计数据[DB].国家统计局,2013-2020. |
| NBSC. Road traffic accident statistics of the People's Republic of China [DB]. National Bureau of Statistics of China, 2013-2020. | |
| 2 | 公安部交通管理局.中华人民共和国道路交通事故统计年报[G]. 公安部交通管理局,2019. |
| Traffic Administration Bureau of the Ministry of Public Security. The People's Republic of China road traffic accident statistics annual report [G]. Traffic Administration Bureau of the Ministry of Public Security, 2019. | |
| 3 | 何仁,冯海鹏.自动紧急制动(AEB)技术的研究与进展[J].汽车安全与节能学报,2019, 10(1): 1-15. |
| HE R, FENG H P. Research and development of autonomous emergency brake (AEB) technology[J]. Journal of Automotive Safety and Energy, 2019, 10(1): 1-15. | |
| 4 | 胡远志,吕章洁,刘西. 基于PreScan的AEB系统纵向避撞算法及仿真验证[J]. 汽车安全与节能学报, 2017, 8(2): 136-142. |
| HU Y Z, LÜ Z J, LIU X. Algorithm and simulation verification of longitudinal collision avoidance for autonomous emergency break (AEB) system based on PreScan[J]. Journal of Automotive Safety and Energy, 2017, 8(2): 136-142. | |
| 5 | FRANCESCO B, ROBERTA R. A collision warning system for rear-end collision: a driving simulator study[J]. Procedia-Social and Behavioral Sciences,2011,20:676-486. |
| 6 | 吕凯光,李旋,韩天园,等.基于驾驶风格识别的AEB控制策略[J].汽车技术,2021(5):16-21. |
| LÜ K G, LI X, HAN T Y, et al. AEB control strategy based on driving style recognition [J]. Automobile Technology, 2021(5):16-21. | |
| 7 | LEE D H, KIM S K, KIM C S, et al. Development of an autonomous braking system using the predicted stopping distance[J]. International Journal of Automotive Technology,2014,15(2):341-346. |
| 8 | 谈东奎,胡港君,朱波,等.考虑预期功能安全的智能汽车自动紧急制动系统[J].汽车工程,2022,44(6):799-807,830. |
| TAN D K, HU G J, ZHU B, et al. Intelligent vehicle autonomous emergency braking system considering safety of the intended functionality[J]. Automotive Engineering,2022,44(6):799-807,830. | |
| 9 | 韦民祥,郑玲,杨威.考虑车辆运动预测的AEB系统控制策略[J/OL].重庆大学学报, https://kns.cnki.net/kcms/detail/50.1044.N.20220506.1151.002.html. |
| WEI M X, ZHENG L, YANG W. AEB system control strategy considering vehicle motion prediction[J/OL].Journal of Chongqing University, https://kns.cnki.net/kcms/detail/50.1044.N.20220506.1151.002.html. | |
| 10 | 徐杰,李博,霍克,等.基于Euro-NCAP的自动紧急制动系统算法开发[C]. 第十七届汽车安全技术学术会议,保定,2014:142-148. |
| XU J, LI B, HUO K, et al. Algorithm development of automatic emergency braking system based on Euro-NCAP[C]. The 17th Academic Conference on Automotive Safety Technology, Baoding,2014:142-148. | |
| 11 | 裴晓飞,刘昭度,马国成,等.汽车主动避撞系统的安全距离模型和目标检测算法[J].汽车安全与节能学报,2012,3(1):26-33. |
| PEI X F, LIU Z D, MA G C, et al. Safe distance model and obstacle detection algorithms for a collision warning and collision avoidance system[J]. Journal of Automotive Safety and Energy,2012,3(1):26-33. | |
| 12 | 兰凤崇,余蒙,李诗成,等.考虑预碰撞时间的自动紧急制动系统分层控制策略研究[J].汽车工程,2020,42(2):206-214. |
| LAN F C, YU M, LI S C, et al. Research on hierarchical control strategy for automatic emergency braking system with consideration of time-to-collision[J]. Automotive Engineering, 2020,42(2):206-214. | |
| 13 | 郭祥靖,孙攀,邓杰,等.基于BP神经网络算法预测的重型半挂汽车列车AEB控制策略研究[J].汽车工程,2021,43(9):1350-1359,1366. |
| GUO X J, SUN P, DENG J, et al. Research on AEB control strategy of a heavy tractor-semitrailer combination based on BP neural network algorithm prediction[J]. Automotive Engineering,2021,43(9):1350-1359,1366. | |
| 14 | KYONGSU Y, JINTAI C. Nonlinear brake control for vehicle CW/CA systems[J].IEEE/ASME Transactions on Mechatronics,2001,6(1):17-25. |
| 15 | 黄城,冀杰,陈琼红,等.考虑舒适性的AEB避撞算法及仿真验证[J].重庆理工大学学报(自然科学),2021,35(4):39-48. |
| HUANG C, JI J, CHEN Q H, et al. Simulation verification of AEB collision avoidance algorithm in consideration of comfort[J]. Journal of Chongqing University of Technology(Natural Science),2021,35(4):39-48. | |
| 16 | MAHDI M, ERIK F, JAN ÅSLUND. Deterministic trajectory planning for non-holonomic vehicles including road conditions, safety and comfort factors[J].IFAC PapersOnLine,2019,52(5):97-102. |
| 17 | MARTINEZ J J, CANUDAS-DE-WIT C. A safe longitudinal control for adaptive cruise control and stop-and-go scenarios[J]. IEEE Transactions on Control Systems Technology, 2007, 15:246-258. |
| 18 | 党睿娜,李升波,王建强,等.兼顾节能与安全的电动车ACC系统[J].汽车工程,2012,34(5):379-384,393. |
| DANG R N, LI S B, WANG J Q, et al. Adaptive cruise control system of electric vehicles considering both economy and safety[J]. Automotive Engineering,2012,34(5):379-384,393. | |
| 19 | 李旭,韩志峰,王建春,等.基于变采样时间模型预测控制的自适应巡航系统[J].机械设计与研究,2021,37(3):115-121,131. |
| LI X, HAN Z F, WANG J C, et al. Research on adaptive cruise control system based on model predictive control with varying sampling time[J]. Machine Design & Research,2021,37(3):115-121,131. | |
| 20 | XUE W Y, ZHENG L. Active collision avoidance system design based on model predictive control with varying sampling time[J]. Automotive Innovation, 2020,3(6) : 62-72. |
| 21 | 敖宏伟,陈学文,荣同康,等.安全距离-时间模型的汽车紧急制动分层控制策略研究[J].重庆理工大学学报(自然科学),2022,36(1):31-38. |
| AO H W, CHEN X W, RONG T K, et al. Research on the hierarchical control strategy of automobile emergency braking system based on safety distance-time model [J]. Journal of Chongqing University of Technology(Natural Science) ,2022,36(1):31-38. | |
| 22 | 李迎弟. 汽车自动紧急制动系统控制策略研究[D].西安:长安大学, 2019. |
| LI Y D. Research on the control strategy of autonomous emergency braking system [D]. Xi’an: Chang 'an University, 2019. | |
| 23 | 刘志强,张春雷,张爱红,等.基于驾驶行为的追尾避撞控制策略研究[J].汽车工程,2017,39(9):1068-1073,1080. |
| LIU Z Q, ZHANG C L, ZHANG A H, et al. A study on the control strategy for rear-end collision avoidance based on drivers' behavior [J].Automotive Engineering,2017,39(9):1068-1073,1080. |
| [1] | Junnian Wang, Chuantai Cheng, Fei Gao, Tiejun Fu, Jindong Ren. An Experimental Study on Optimal H-Point and Seat Parameters for Shared Car Drivers [J]. Automotive Engineering, 2024, 46(1): 39-49. |
| [2] | Xiao Wu, Wenku Shi, Zhiyong Chen. Active Suspension Control Based on Interacting Multiple Model Kalman Filter [J]. Automotive Engineering, 2023, 45(7): 1200-1211. |
| [3] | Tiefang Zou,Qiancheng Liu,Liang Wei. Typical Collision Scenarios and Accident Characteristics of Accidents not Avoided After Installing Traditional AEB [J]. Automotive Engineering, 2023, 45(6): 1062-1072. |
| [4] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [5] | Qingyang Huang,Xiaoping Jin,Yikang Zhang. Analysis of Drivers' Driving Posture Change Rule Under the Condition of Automatic Driving Level Improvement [J]. Automotive Engineering, 2023, 45(3): 382-392. |
| [6] | Yunfei Zha,Xiaoshan Shi,Hao Wu,Minxu Li,Huiqin Chen. Study of Vehicle Aerodynamics Characteristic Based on Active Tilting Rear Wing [J]. Automotive Engineering, 2023, 45(3): 489-500. |
| [7] | Jinxia Liu,Zhihao Liang,Qiang Wang,Mingxing Wen. Research on the Equivalent Fuel Consumption Minimizing Energy Management Strategy of Through-the-Road Vehicle [J]. Automotive Engineering, 2023, 45(2): 285-292. |
| [8] | Dandan Hu,Pengfei Yin,Guochen Niu,Jinju Zhao. Research on Active Obstacle Avoidance Control of Off-axis Trailing Vehicle on Unstructured Road [J]. Automotive Engineering, 2023, 45(12): 2318-2329. |
| [9] | Guohua Wang,Guohui Sang,Yingchao Zhang,Jincheng Xu. Multi-parameter Optimization Analysis of Factors Influencing Thermal Comfort in Automobile Passenger Compartment [J]. Automotive Engineering, 2023, 45(11): 2023-2033. |
| [10] | Jie Hu,Ruipeng Chen,Zhihao Zhang,Bowen Xiang,Haoyan Liu,Qi Zhu,Qixiang Guo. Path Tracking Control of Autonomous Truck Based on RMPC [J]. Automotive Engineering, 2023, 45(11): 2092-2103. |
| [11] | Jiqing Chen,Xiaoting Li,Fengchong Lan,Weijian Li. Analysis of Differential Effect of Local Thermal Response on Overall Thermal Sensation in Non-uniform Thermal Environment [J]. Automotive Engineering, 2023, 45(11): 2034-2046. |
| [12] | Shiju Pan,Yongle Li,Zixian Li,Binbing He,Yuan Zhu,Youchun Xu. Path Following Method of Intelligent Vehicles Based on Improved Pure Tracking [J]. Automotive Engineering, 2023, 45(1): 1-8. |
| [13] | Shengzhao Chen,Minyi Zheng,Qihui Ling,Zhewu Chen. An Investigation on the Characteristics of Hydraulically Interconnected Suspension System with Dual Accumulators [J]. Automotive Engineering, 2022, 44(2): 272-279. |
| [14] | Kaizhan Gao,Qiao Luo,Zhifei Zhang,Zhongming Xu. Vibration Comfort Evaluation of Vehicle Seat Based on Body Pressure Distribution [J]. Automotive Engineering, 2022, 44(12): 1936-1943. |
| [15] | Weichen Wang,Junqiu Li,Fengchun Sun,Jian Song,Yonghua Wu. Path Tracking Strategy for All-Wheel Steering of Multi-axle Heavy-Duty Vehicles Based on Tube MPC [J]. Automotive Engineering, 2022, 44(11): 1665-1675. |