Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (9): 1350-1359.doi: 10.19562/j.chinasae.qcgc.2021.09.012
Previous Articles Next Articles
Xiangjing Guo( ),Pan Sun,Jie Deng,Yong Liu,Zhuang Liu,Shuangping Liu
),Pan Sun,Jie Deng,Yong Liu,Zhuang Liu,Shuangping Liu
Received:2021-07-12
Revised:2021-08-04
Online:2021-09-25
Published:2021-09-26
Contact:
Xiangjing Guo
E-mail:guoxiangjing@dfcv.com.cn
Xiangjing Guo,Pan Sun,Jie Deng,Yong Liu,Zhuang Liu,Shuangping Liu. Research on AEB Control Strategy of a Heavy Tractor-Semitrailer Combination Based on BP Neural Network Algorithm Prediction[J].Automotive Engineering, 2021, 43(9): 1350-1359.
"
| 参数 | 数值 |
|---|---|
| 牵引车整备质量/kg | 5 500 |
| 半挂车整备质量/kg | 180 000 |
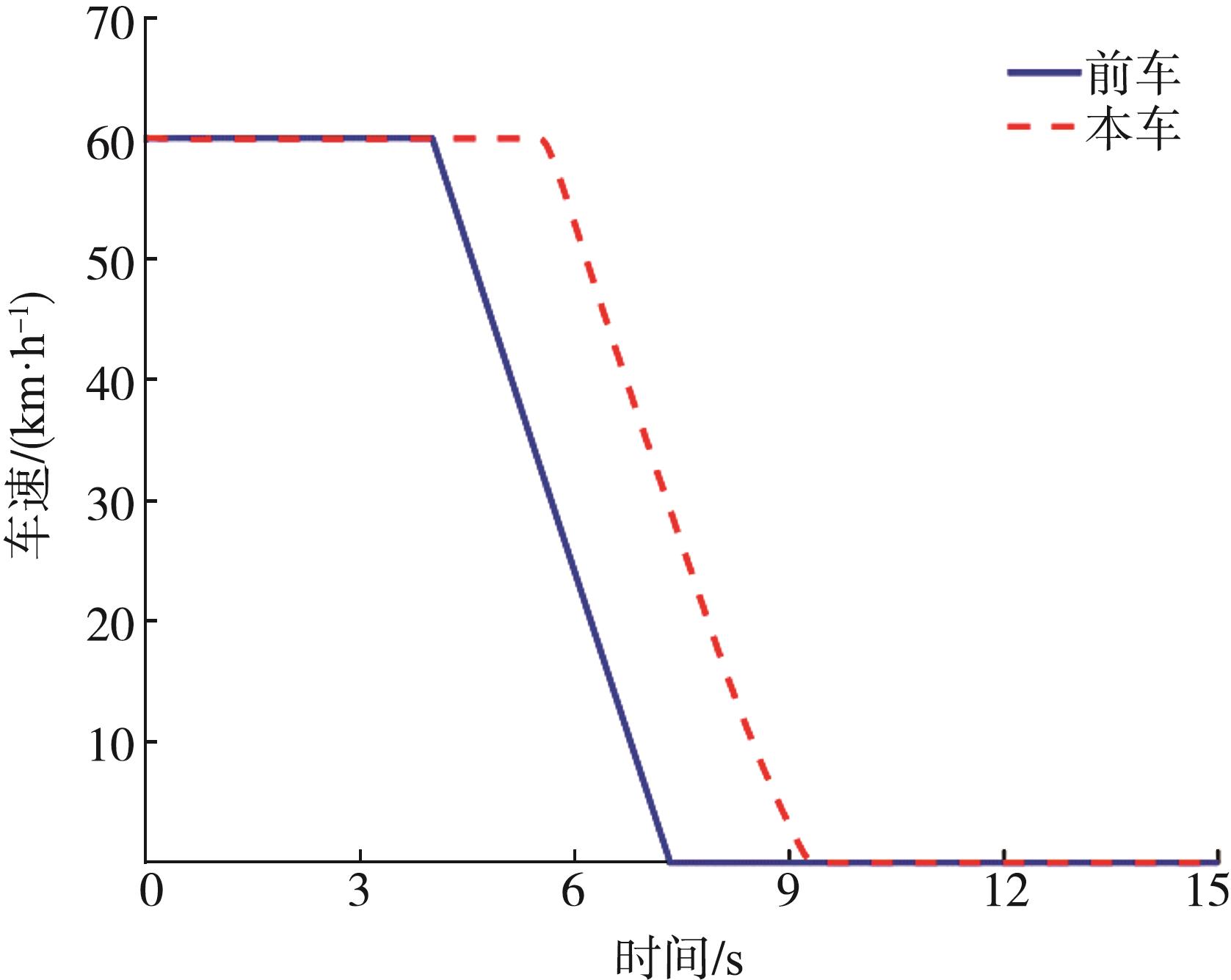
| 前车初始车速/(km·h-1) | 0~80 |
| 本车初始车速/(km·h-1) | 30~80 |
| 前车减速度/(m·s-2) | 0~5 |
| 紧急制动时本车最大减速度/(m·s-2) | 6 |
| 本车与前车初始相对距离/m | 30~80 |
| 路面附着系数 | 0.8 |

"
"

"
"

"


"

"

"

"

"
"

"

"
"

"

"

"

"
"
"
"

"

"

| 1 | 臧宁宁,徐阳.适用于商用车的自主紧急制动系统控制算法研究[J].重型汽车,2018(1):7-11. |
| ZANG N N,XU Y. Research on control algorithm of autonomous emergency braking system for commercial vehicles[J]. Heavy Duty Truck,2018(1):7-11. | |
| 2 | 马玉喆,张顺舟,丁能根.弯道下商用车AEB的系统算法[J].江苏大学学报(自然科学版),2019,40(4):386-390. |
| MA Y Z,ZHANG S Z,DING N G.System algorithm of commercial vehicle AEB under curve[J]. Journal of Jiangsu University (Natural Science Edition), 2019,40(4):386-390. | |
| 3 | 杨为,赵胡屹,舒红.自动紧急制动系统行人避撞策略及仿真验证[J].重庆大学学报,2019,42(2):1-10. |
| YANG W,ZHAO H Y,SHU H. Pedestrian collision avoidance strategy and simulation verification of automatic emergency braking system[J]. Journal of Chongqing University,2019,42(2):1-10. | |
| 4 | 黄舒伟,何少炜,金智林.基于深度强化学习的汽车自动紧急制动策略[J].汽车技术,2021(5):9-15. |
| HUANG S W,HE S W,JIN Z L. Auto emergency braking strategy based on deep reinforcement learning[J]. Automotive Technology,2021(5):9-15. | |
| 5 | 辜志强,胡仕雨.面向AEB的商用车下坡工况制动距离预测与控制方法[J].数字制造科学,2019,17(4):276-280. |
| GU Z Q, HU S Y. AEB oriented braking distance prediction and control method for commercial vehicles in downhill conditions[J]. Digital Manufacturing Science,2019,17(4):276-280. | |
| 6 | YANG Wei,ZHANG Xiang,LEI Qian,et al. Research on longitudinal active collision avoidance of autonomous emergency braking pedestrian system (AEB⁃P)[J]. Sensors (Basel, Switzerland),2019,19(21). |
| 7 | 兰凤崇,余蒙,李诗成,等.考虑预碰撞时间的自动紧急制动系统分层控制策略研究[J].汽车工程,2020,42(2):206-214. |
| LAN F C,YU M,LI S C,et al.Research on hierarchical control strategy of automatic emergency braking system considering pre collision time[J].Automotive Engineering, 2020,42 (2): 206-214. | |
| 8 | PARK M K,LEE S Y,KWON C K ,et al.Design of pedestrian target selection with funnel map for pedestrian AEB system[J].IEEE Transactions on Vehicular Technology,2017,66(5):3597-3609. |
| 9 | KIM G ,MUN H ,KIM B. Performance of AEB system on a slope using an extended kalman filter[J]. International Journal of Software Engineering and Knowledge Engineering,2019,29(7). |
| 10 | COELINGH E , EIDEHALL A , BENGTSSON M. Collision warning with full auto brake and pedestrian detection - a practical example of automatic emergency braking[C] . Intelligent Transportation Systems (ITSC), 2010 13th International IEEE Conference on. IEEE, 2010. |
| 11 | 任永强,伍奇胜,袁飚.基于BP及其优化神经网络的双电机多挡AMT挡位决策研究[J].机械传动,2020,44(1):41-46. |
| REN Y Q,WU Q S,YUAN B. Research on dual motor multi gear AMT gear decision based on BP and its optimized neural network[J].Mechanical Transmission, 2020,44 (1): 41-46. | |
| 12 | CELENTANO G, IERVOLINO R, PORRECA S. Car brake system modeling for longitudinal control design[J]. Control Applications IEEE, 2003, 1(1): 25-30. |
| 13 | 刘金琨. 滑模变结构控制MATLAB仿真[M].3版.北京: 清华大学出版社, 2015. |
| LIU J K. Matlab simulation of sliding mode variable structure control [M].3rd ed.Beijing: Tsinghua University Press,2015. |
| [1] | Bin Deng, Weihan Li, Di Wu, Bingzhan Zhang, Han Zhao. Integral Sliding Mode Control for Four-Wheel Active Steering Based on Kalman Filter Extended State Observer [J]. Automotive Engineering, 2024, 46(1): 100-108. |
| [2] | Xiao Wu, Wenku Shi, Zhiyong Chen. Active Suspension Control Based on Interacting Multiple Model Kalman Filter [J]. Automotive Engineering, 2023, 45(7): 1200-1211. |
| [3] | Yunfei Zha,Xiaoshan Shi,Hao Wu,Minxu Li,Huiqin Chen. Study of Vehicle Aerodynamics Characteristic Based on Active Tilting Rear Wing [J]. Automotive Engineering, 2023, 45(3): 489-500. |
| [4] | Jinxia Liu,Zhihao Liang,Qiang Wang,Mingxing Wen. Research on the Equivalent Fuel Consumption Minimizing Energy Management Strategy of Through-the-Road Vehicle [J]. Automotive Engineering, 2023, 45(2): 285-292. |
| [5] | Lin He,Ziang Xu,Chunrong Huang,Chao Gong,Shuhua Li,Qin Shi. Research on Sliding Mode Control Algorithm for Angle Tracking Prediction of Steer-by-wire System [J]. Automotive Engineering, 2023, 45(12): 2200-2208. |
| [6] | Shiju Pan,Yongle Li,Zixian Li,Binbing He,Yuan Zhu,Youchun Xu. Path Following Method of Intelligent Vehicles Based on Improved Pure Tracking [J]. Automotive Engineering, 2023, 45(1): 1-8. |
| [7] | Yongtao Liu,Chuanpan Liu,Xiangan Liu,Yisong Chen,Jie Qiao. Automatic Emergency Braking System Based on Model Predictive Control with Adaptive Sampling Time [J]. Automotive Engineering, 2023, 45(1): 32-41. |
| [8] | Dongkui Tan,Gangjun Hu,Bo Zhu,Lai Jin,Jie Zhang. Intelligent Vehicle Autonomous Emergency Braking System Considering Safety of the Intended Functionality [J]. Automotive Engineering, 2022, 44(6): 799-808. |
| [9] | Sensen Cong,Feng Gao,Shucai Xu. Cooperative Control of Vehicle Lateral and Longitudinal Stability Based on Dynamic Stability Region [J]. Automotive Engineering, 2022, 44(6): 900-908. |
| [10] | Xuebing Yin,Yong Chen,Qinglin Dai,Hai Liu,Naili Tian,Bolin He. Study on Shift Schedule of 2DCT for Pure Electric Vehicle Based on NSGA-Ⅱ Algorithm and Fuzzy Control [J]. Automotive Engineering, 2022, 44(10): 1571-1580. |
| [11] | Jian Zhao,Jinpeng Du,Bing Zhu,Zhiwei Wang,Zhicheng Chen,Xiaowen Tao. Longitudinal Cruise Control of Intelligent Vehicles Based on Adaptive Dynamic Sliding Mode Control [J]. Automotive Engineering, 2022, 44(1): 8-16. |
| [12] | Xiaohui Liu,Liangyao Yu,Sheng Zheng,Zhenghong Lu,Jian Song. Research on Redundant Anti-lock Braking Algorithm Based on eBooster [J]. Automotive Engineering, 2022, 44(1): 82-93. |
| [13] | Luming Chen,Zili Liao,Zheng Zhang. Design of Hierarchical Control System for Dual⁃steering of Multi⁃wheel Distributed Electric Drive Vehicles [J]. Automotive Engineering, 2021, 43(9): 1383-1393. |
| [14] | Guoqing Geng,Hao Li,Haobin Jiang,Jie Chen,Bin Tang. Research on Active Returnability Control for Electro⁃hydraulic Coupling Steering System of Commercial Vehicles [J]. Automotive Engineering, 2021, 43(6): 899-908. |
| [15] | Yue Ren,Jie Ji,Ying Zhao,Yixiao Liang,Ling Zheng. Path Tracking Control of Intelligent Vehicle Based on Minimal Model Error Estimation [J]. Automotive Engineering, 2021, 43(4): 580-587. |