Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (10): 1842-1852.doi: 10.19562/j.chinasae.qcgc.2024.10.011
Previous Articles Next Articles
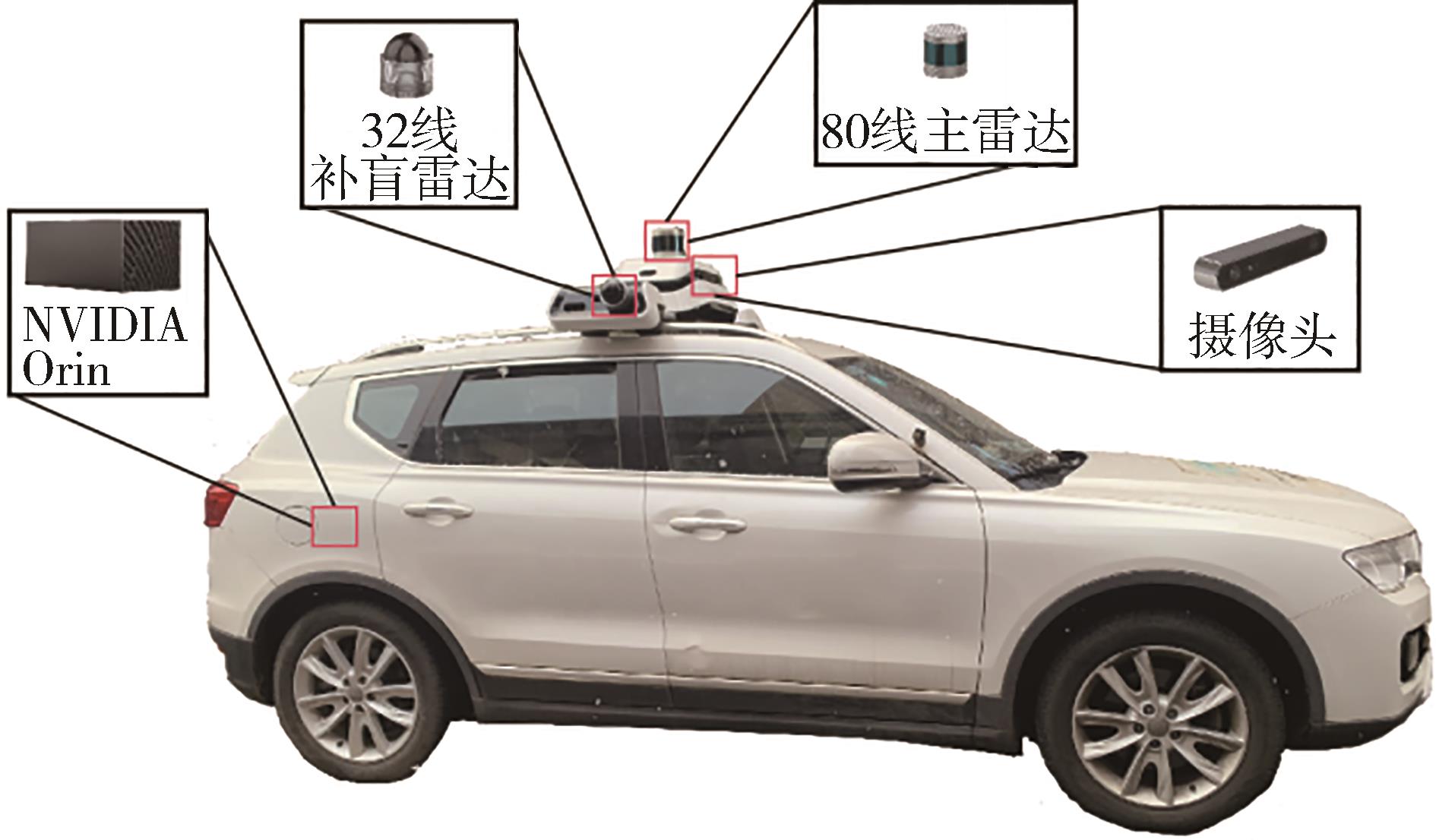
Hongyu Hu,Minghong Tang,Fei Gao,Mingxi Bao,Zhenhai Gao
Received:2024-05-11
Revised:2024-06-24
Online:2024-10-25
Published:2024-10-21
Contact:
Zhenhai Gao
Hongyu Hu,Minghong Tang,Fei Gao,Mingxi Bao,Zhenhai Gao. Research on the Estimation Method of Road Friction Coefficient Ahead Based on Point Cloud Reflection Properties[J].Automotive Engineering, 2024, 46(10): 1842-1852.

"


"
"
| 路面类型 | 训练集数据量 | 测试集数据量 |
|---|---|---|
| 干燥柏油路面 | 36 457 | 9 914 |
| 积雪路面 | 38 962 | 9 741 |
| 混凝土路面 | 55 710 | 13 927 |
| 结冰路面 | 43 960 | 10 990 |
| 湿滑柏油路面 | 40 350 | 10 087 |

"

"
"


"
"
"

"

"
"
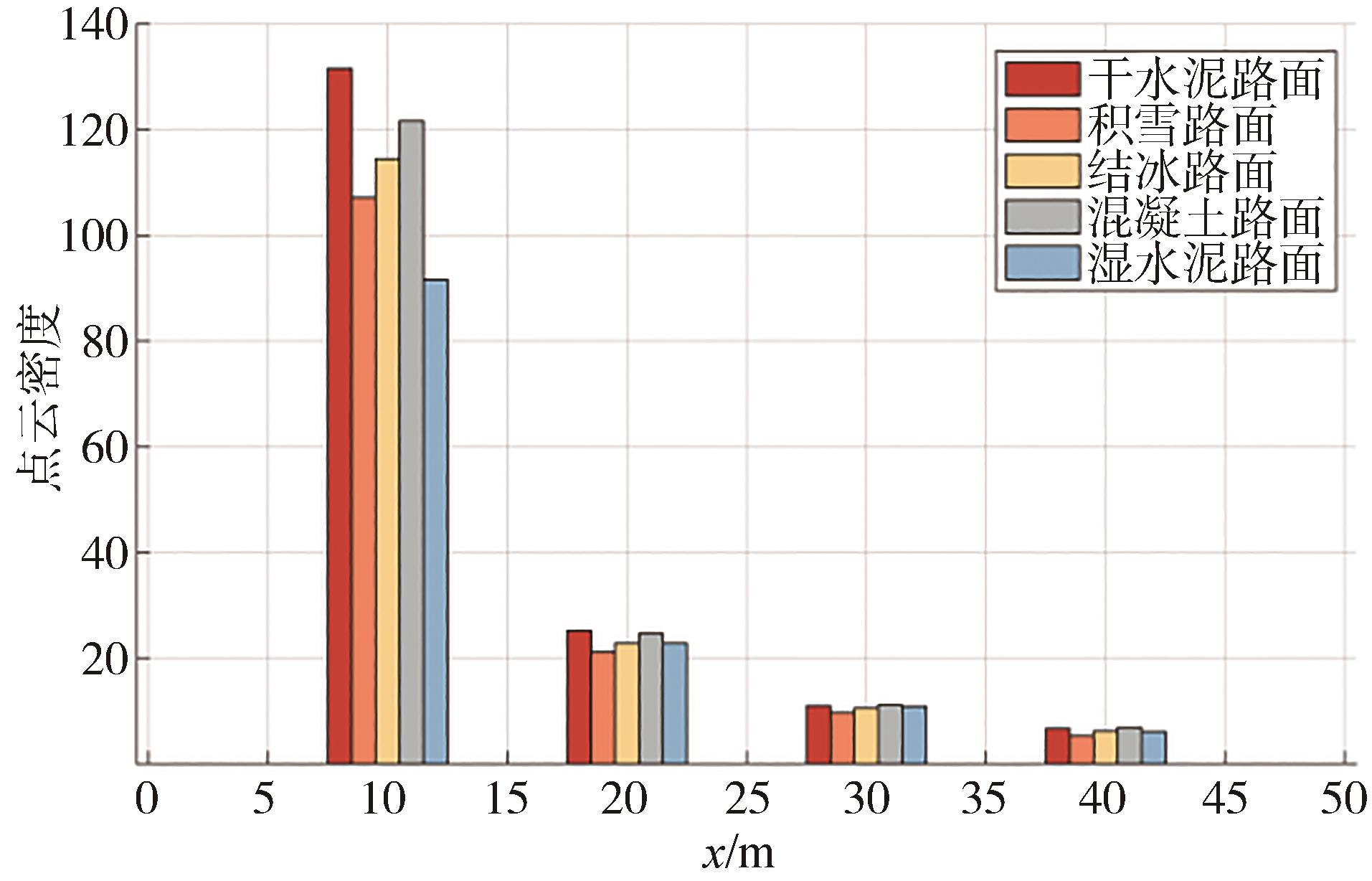
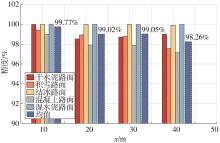
路面 类型 | 干水泥 路面 | 湿水泥 路面 | 混凝土 路面 | 积雪 路面 | 结冰 路面 |
|---|---|---|---|---|---|
| 附着系数 | 0.55~0.8 | 0.45~0.7 | 0.55~0.8 | 0.2~0.45 | 0.1~0.2 |

"
"


"
"
| 算法 | 本文算法 | 文献 | 文献 |
|---|---|---|---|
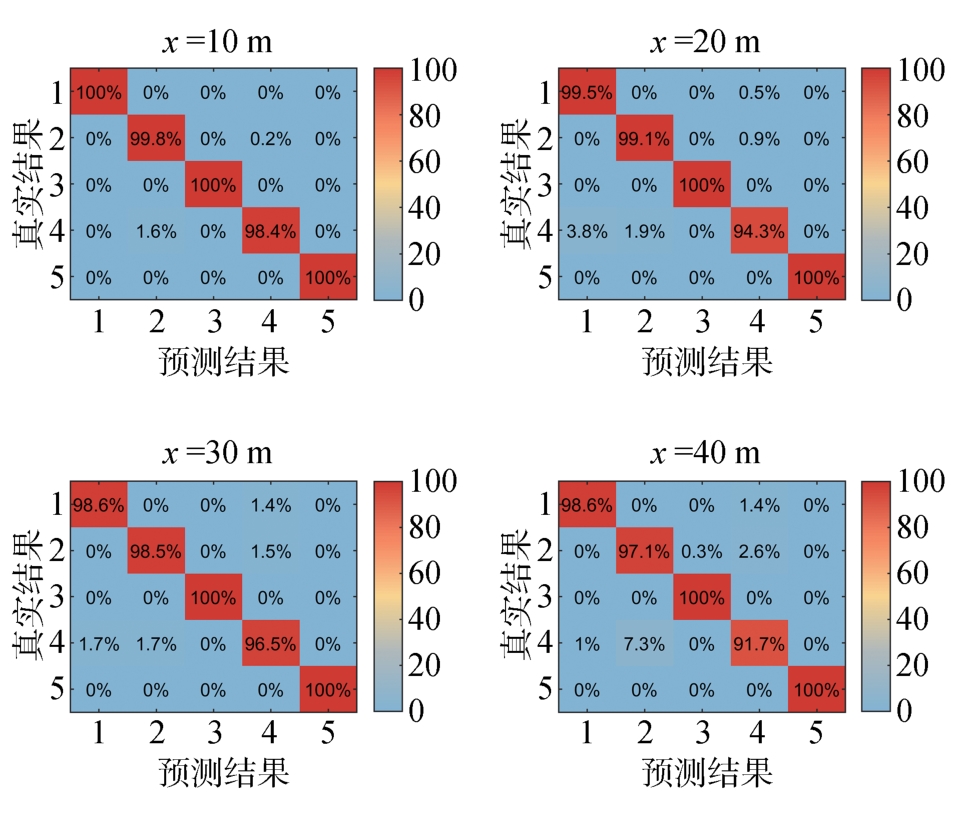
| 精度/% | 99.3 | 88.8 | 94.49 |

"
"
"
"
"

"

"
点云输入 周期 | 路面点云提取算法平均运行周期 | 路面类型识别算法平均运行周期 | 算法总周期 |
|---|---|---|---|
| 100 | 30 | 25 | 55 |
| 1 | 袁朝春, 张龙飞, 陈龙, 等. 路面峰值附着系数辨识算法研究[J]. 汽车工程, 2017,39(11): 1268-1273. |
| YUAN C C, ZHANG L F, CHEN L, et al. Research on identification algorithm of road peak friction coefficient[J]. Automotive Engineering, 2017, 39(11): 1268-1273. | |
| 2 | ZHAO T, HE J, LV J, et al. A comprehensive implementation of road surface classification for vehicle driving assistance: dataset, models, and deployment[J]. IEEE Transactions on Intelligent Transportation Systems, 2023,24(8): 8361-8370. |
| 3 | ZHANG R Y, FENG Y L, SHI P C, et al. Tire-road friction coefficient estimation for distributed drive electric vehicles using PMSM sensorless control[J]. IEEE Transactions on Vehicular Technology, 2023,72(7): 8672-8685. |
| 4 | 高博麟, 陈慧, 谢书港, 等. 分布式电驱动车车速及路面附着系数融合估计[J]. 汽车工程, 2016,38(2): 216-220. |
| GAO B L, CHEN H, XIE S G, et al. Integrated estimation of distributed electric vehicle speed and road friction coefficient[J]. Automotive Engineering, 2016, 38(2): 216-220. | |
| 5 | CHENG Q, CORREA-VICTORINO A, CHARARA A. A new nonlinear observer using unscented Kalman filter to estimate sideslip angle, lateral tire road forces and tire road friction coefficient[C]. IEEE, 2011. |
| 6 | 李刚, 解瑞春, 卫绍元, 等. 基于双容积卡尔曼滤波的车辆状态与路面附着系数估计[J]. 中国科学(技术科学), 2015,45(4): 403-414. |
| LI G, XIE R C, WEI S Y, et al. Estimation of vehicle state and road friction coefficient based on dual-volume Kalman filter[J]. Science China (Technological Sciences), 2015, 45(4): 403-414. | |
| 7 | 熊璐, 金达, 冷搏, 等. 考虑复杂激励条件的分布式驱动电动汽车路面附着系数自适应估计方法[J]. 机械工程学报, 2020,56(18): 123-133. |
| XIONG L, JIN D, LENG B, et al. An adaptive estimation method for road friction coefficient of distributed drive electric vehicles considering complex excitation conditions[J]. Journal of Mechanical Engineering, 2020, 56(18): 123-133. | |
| 8 | CASSELGREN J, ROSENDAHL S, SJÖDAHL M, et al. Road condition analysis using NIR illumination and compensating for surrounding light[J]. Optics and Lasers in Engineering, 2016,77: 175-182. |
| 9 | NOLTE M, KISTER N, MAURER M. Assessment of deep convolutional neural networks for road surface classification[C]. Ithaca: IEEE, 2018. |
| 10 | YANG H, JANG H, JEONG D. Detection algorithm for road surface condition using wavelet packet transform and SVM[C]. IEEE, 2013. |
| 11 | ŠABANOVIČ E, ŽURAULIS V, PRENTKOVSKIS O, et al. Identification of road-surface type using deep neural networks for friction coefficient estimation[J]. Sensors, 2020,20(3): 612. |
| 12 | ZHAO J, WU H, CHEN L. Road surface state recognition based on SVM optimization and image segmentation processing[J]. Journal of Advanced Transportation, 2017,2017: 1-21. |
| 13 | 王海, 蔡柏湘, 蔡英凤, 等. 基于语义分割网络的路面积水与湿滑区域检测[J]. 汽车工程, 2021,43(4): 485-491. |
| WANG H, CAI B X, CAI Y F, et al. Detection of road surface waterlogging and wet slippery areas based on semantic segmentation network[J]. Automotive Engineering, 2021, 43(4): 485-491. | |
| 14 | HOLZMANN F, BELLINO M, SIEGWART R, et al. Predictive estimation of the road-tire friction coefficient[C]. 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 2006: 885-890. |
| 15 | 余卓平, 曾德全, 熊璐, 等. 基于激光雷达的无人车路面附着系数估计[J]. 华中科技大学学报(自然科学版), 2019,47(7): 124-127. |
| YU Z P, ZENG D Q, XIONG L, et al. Estimation of road friction coefficient for autonomous vehicles based on LiDAR[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2019, 47(7): 124-127. | |
| 16 | HAN Z, LIU W, GAO Z, et al. A method for real-time road surface identification of intelligent tire systems based on random convolutional kernel neural network[J]. IEEE Transactions on Intelligent Vehicles, 2024: 1-15. |
| 17 | GUO H, ZHAO X, LIU J, et al. A fusion estimation of the peak tire-road friction coefficient based on road images and dynamic information[J]. Mechanical Systems and Signal Processing, 2023,189: 110029. |
| 18 | 庹文坤. 多源信息融合的路面附着系数估计算法研究[D]. 石家庄: 石家庄铁道大学, 2021. |
| TUO W K. Research on road friction coefficient estimation algorithm based on multi-source information fusion[D]. Shijiazhuang: Shijiazhuang Tiedao University, 2021. | |
| 19 | 张雷, 关可人, 丁晓林, 等. 基于图像识别与动力学融合的路面附着系数估计方法[J]. 汽车工程, 2023,45(7): 1222-1234, 1262. |
| ZHANG L, GUAN K R, DING X L, et al. Road friction coefficient estimation method based on image recognition and dynamics fusion[J]. Automotive Engineering, 2023, 45(7): 1222-1234, 1262. | |
| 20 | 员荣祥. 基于图像信息和车辆状态的路面附着系数估计研究[D]. 秦皇岛: 燕山大学, 2022. |
| YUAN R X. Research on road friction coefficient estimation based on image information and vehicle status[D]. Qinhuangdao: Yanshan University, 2022. | |
| 21 | 刘惠. 视觉与动力学信息融合的智能车辆路面附着系数估计[D]. 长春: 吉林大学, 2021. |
| LIU H. Estimation of road friction coefficient for intelligent vehicles based on the fusion of vision and dynamics information[D]. Changchun: Jilin University, 2021. | |
| 22 | KASHANI A, OLSEN M, PARRISH C, et al. A review of LIDAR radiometric processing: from Ad Hoc intensity correction to rigorous radiometric calibration[J]. Sensors, 2015,15(11): 28099-28128. |
| 23 | 侯欣辰, 冷搏, 曾德全, 等. 基于激光反射强度特征的智能汽车路面估计方法[J]. 同济大学学报(自然科学版), 2021,49(z1): 141-147. |
| HOU X C, LENG B, ZENG D Q, et al. Road surface estimation method for intelligent vehicles based on laser reflection intensity characteristics[J]. Journal of Tongji University (Natural Science), 2021, 49(z1): 141-147. | |
| 24 | LIU B, ZHAO D, ZHANG H. Road classification using 3D LiDAR sensor on vehicle[J]. Measurement Science & Technology, 2023,34(6): 65201. |
| 25 | HEINZLER R, SCHINDLER P, SEEKIRCHER J, et al. Weather influence and classification with automotive lidar sensors[C]. 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 2019: 1527-1534. |
| 26 | SEBASTIAN G, VATTEM T, LUKIC L, et al. Range weather net for LiDAR-only weather and road condition classification[C]. 2021 IEEE Intelligent Vehicles Symposium (IV), Nagoya, Japan, 2021. |
| 27 | 韩栋斌, 徐友春, 李华, 等. 无人车三维激光雷达反射强度校准[J]. 军事交通学院学报, 2017,19(10): 85-90. |
| HAN D B, XU Y C, LI H, et al. Calibration of 3D LiDAR reflection intensity for unmanned vehicles[J]. Journal of Military Transportation University, 2017, 19(10): 85-90. | |
| 28 | 喻凡, 林逸. 汽车系统动力学[M]. 2版. 北京:机械工业出版社, 2017: 385. |
| YU F, LIN Y. Vehicle system dynamics[M]. 2nd ed. Beijing: China Machine Press, 2017: 385. |
| [1] | Xinrong Zhang,Xin Wang,Xinle Gong,Jin Huang,Dan Huang,Pengxing Wang. Segmented Identification Method of Tire-Road Friction Coefficient for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(10): 1923-1932. |
| [2] | Runhui Huang,Likun Hu,Mingfang Su,Daye Xu,Aoran Chen. Semantic Segmentation Method of LiDAR Point Cloud Based on 3D Conical Grid [J]. Automotive Engineering, 2022, 44(8): 1173-1182. |
| [3] | Desheng Xie,Youchun Xu,Feng Lu,Shiju Pan. Real-time Detection of 3D Objects Based on Multi-Sensor Information Fusion [J]. Automotive Engineering, 2022, 44(3): 340-349. |
| [4] | Wang Yan, Liang Guanqun, Wei Yintao. Road Identification Algorithm of Intelligent Tire Based on Support Vector Machine [J]. Automotive Engineering, 2020, 42(12): 1671-1678. |
| [5] | Xiong Hui, Guo Yu'ang, Chen Chaoyi, Xu Qing, Li Keqiang. Traffic Light Detection Based on Genetic Optimization and Deep Learning [J]. Automotive Engineering, 2019, 41(8): 960-966. |
| [6] | Chen Wenqiang, Xiong Hui, Li Keqiang, Li Xiaofei& Zhang Dezhao. Concurrent Pedestrian and Cyclist Detection Based on Deep Neural Networks [J]. , 2018, 40(6): 726-. |