Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (10): 1829-1841.doi: 10.19562/j.chinasae.qcgc.2024.10.010
Previous Articles Next Articles
Zhiqun Yuan1,2,3( ),Yanqiang Chen1,Yuxuan Chang1,Diansheng Huo1,Li Lin1,2
),Yanqiang Chen1,Yuxuan Chang1,Diansheng Huo1,Li Lin1,2
Received:2024-04-24
Revised:2024-06-07
Online:2024-10-25
Published:2024-10-21
Contact:
Zhiqun Yuan
E-mail:yzqhnu@163.com
Zhiqun Yuan,Yanqiang Chen,Yuxuan Chang,Diansheng Huo,Li Lin. Model Predictive Control with Adaptive Horizon for Vehicle Trajectory Tracking Considering Crosswind Stability[J].Automotive Engineering, 2024, 46(10): 1829-1841.

"

"
| 参数 | 单位 | 数值 |
|---|---|---|
| 汽车质量m | kg | 1 412 |
| 质心至前轴距离lf | mm | 1 400 |
| 质心至后轴距离lr | mm | 1 650 |
| 车身的横摆惯量Iz | kg·m2 | 3 528 |
| 路面摩擦因数μ | 0.85 |
"
"
"
| 序号 | 主要边界条件 | 主超车车道 |
|---|---|---|
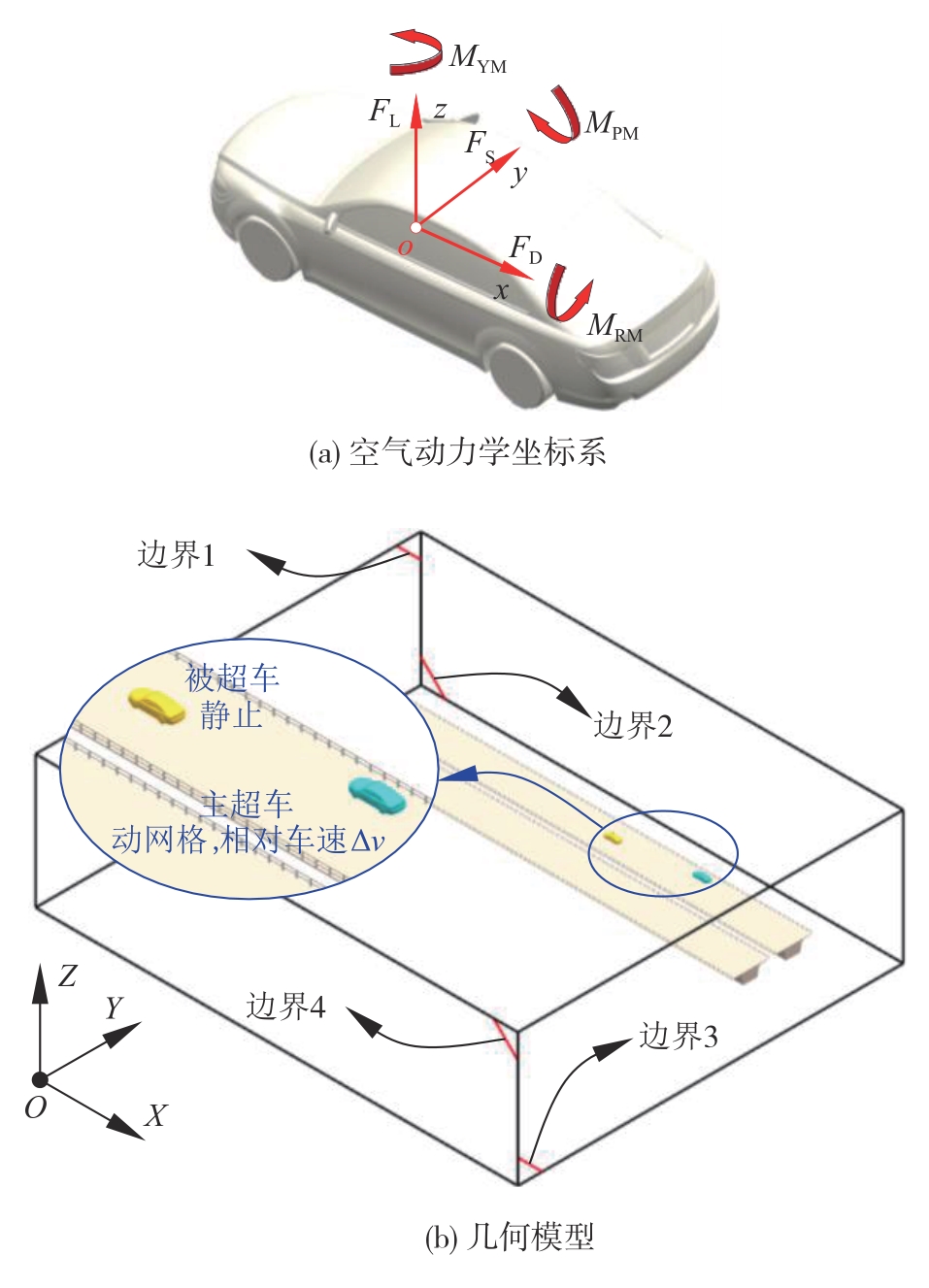
| 1-1 | 边界2:速度入口,ux =0 m/s、uy =-20 m/s 边界1、3和4:压力出口,pstatic=0 主超车:动网格,车速v=72 km/h 其它:壁面边界 | 1 |
| 1-2 | 2 | |
| 1-3 | 3 | |
| 2-1 | 边界2:速度入口,ux =0 m/s、uy =-20 m/s 边界1、3和4:压力出口,pstatic=0 主超车:动网格,车速v=108 km/h 其它:壁面边界 | 1 |
| 2-2 | 3 | |
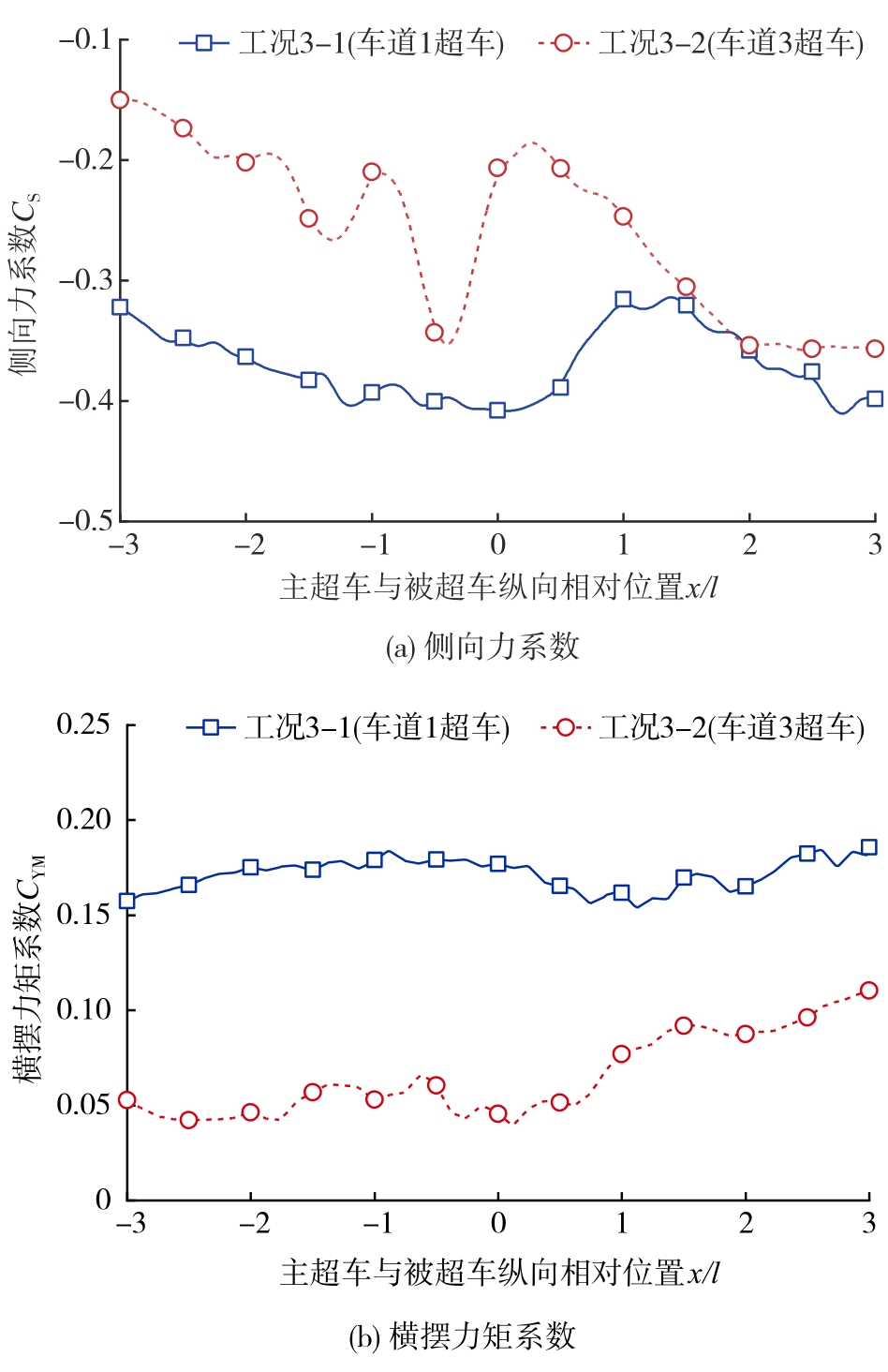
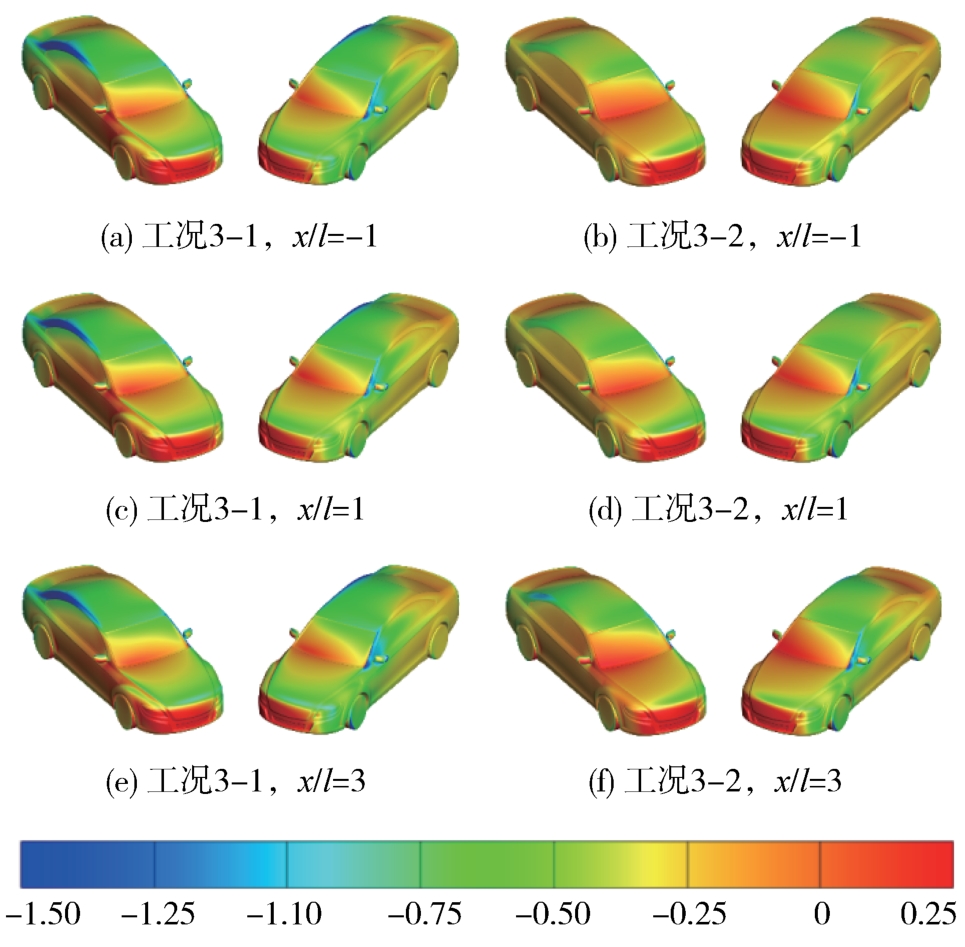
| 3-1 | 边界1和2:速度入口,ux =20 m/s、uy =-20 m/s 边界3和4:压力出口,pstatic=0 主超车:动网格,相对车速Δv=36 km/h 其它:壁面边界 | 1 |
| 3-2 | 3 |
"
"

"
| 气动系数 | 工况序号 | ||||
|---|---|---|---|---|---|
| 1-1 | 1-2 | 1-3 | 2-1 | 2-2 | |
| 侧向力系数CS | -0.280 | -0.166 | -0.152 | -0.313 | -0.200 |
| 横摆力矩系数CYM | 0.182 | 0.069 | 0.058 | 0.143 | 0.050 |
"


"
"

"
"

"

"
"
| 侧偏安全风险等级 | 风险阈值 |
|---|---|
| LG=0 | EZ/EZmax<0.02 |
| LG=1 | 0.02≤EZ/EZmax<0.1 |
| LG=2 | 0.1≤EZ/EZmax<0.2 |
| LG=3 | 0.2≤EZ/EZmax<0.3 |
| LG=4 | 0.3≤EZ/EZmax<0.4 |
| LG=5 | 0.4≤EZ/EZmax<0.5 |
| LG=6 | 0.5≤EZ/EZmax<0.6 |
| LG=7 | EZ/EZmax≥0.6 |

"

"
| 变量 | ey | LG | v | ΔNP | ΔNC |
|---|---|---|---|---|---|
| 基本论域 | [0, 1] | [0, 7] | [0, 120] | [-8, 8] | [-3, 3] |
| 模糊论域 | [0, 3] | [0, 7] | [0, 12] | [-8, 8] | [-3, 3] |
"
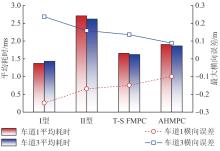
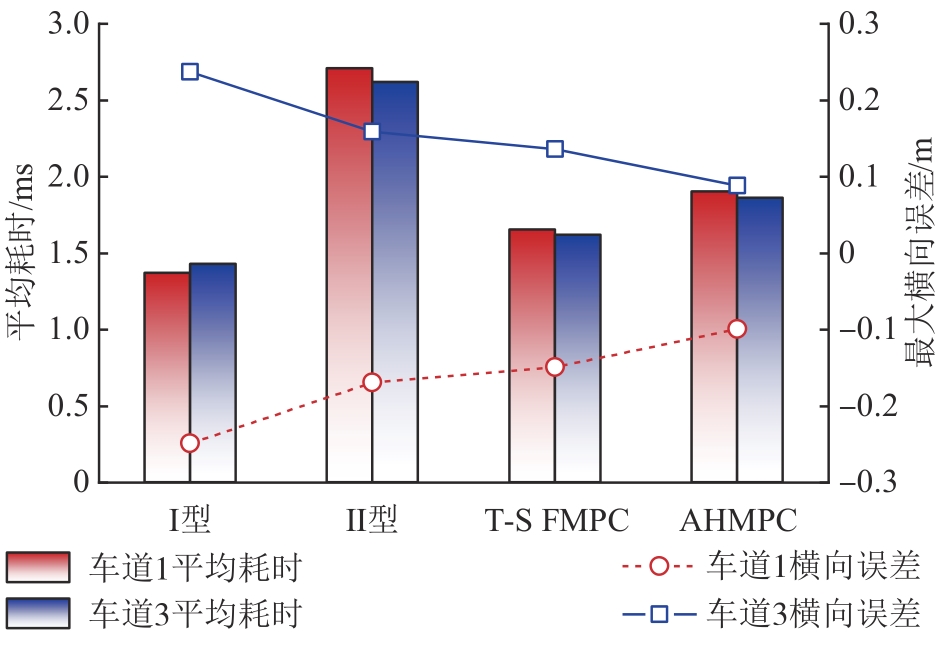
| 控制器类型 | NC | NP |
|---|---|---|
| Ⅰ型 | 1 | 20 |
| Ⅱ型 | 7 | 30 |
| T-S FMPC | 3 | 20 |
"
"
"

"

| 1 | GUO H Y, CAO D P, CHEN H, et al. Model predictive path following control for autonomous cars considering a measurable disturbance: implementation, testing, and verification[J]. Mechanical Systems and Signal Processing, 2019, 118: 41-60. |
| 2 | KIM M, LEE D, AHN J, et al. Model predictive control method for autonomous vehicles using time-varying and non-uniformly spaced horizon[J]. IEEE Access, 2021, 9: 86475-86487. |
| 3 | 周维, 过学迅, 裴晓飞, 等. 基于RRT与MPC的智能车辆路径规划与跟踪控制研究[J]. 汽车工程, 2020, 42(9): 1151-1158. |
| ZHOU W, GUO X X, PEI X F, et al. Study on path planning and tracking control for intelligent vehicle based on RRT and MPC[J]. Automotive Engineering, 2020, 42(9): 1151-1158. | |
| 4 | 关龙新, 顾祖飞, 张超, 等. 考虑系统复杂扰动的智能车模型预测路径跟踪控制[J]. 汽车工程, 2022, 44(12): 1844-1855. |
| GUAN L X, GU Z F, ZHANG C, et al. Model predictive path following control of intelligent vehicles considering system complex disturbances[J]. Automotive Engineering, 2022, 44(12): 1844-1855. | |
| 5 | CHOI Y, LEE W, KIM J, et al. A variable-sampling time model predictive control algorithm for improving path-tracking performance of a vehicle[J]. Sensors, 2021, 21(20): 6845. |
| 6 | 李韶华, 杨泽坤, 王雪玮. 基于T-S模糊变权重MPC的智能车轨迹跟踪控制[J]. 机械工程学报, 2023, 59(4): 199-212. |
| LI S H, YANG Z K, WANG X W. Trajectory tracking control of an intelligent vehicles based on T-S fuzzy variable weight MPC[J]. Journal of Mechanical Engineering, 2023, 59(4): 199-212. | |
| 7 | 杜荣华, 胡鸿飞, 高凯, 等. 基于变预测时域MPC的自动驾驶汽车轨迹跟踪控制研究[J]. 机械工程学报, 2022, 58(24): 275-288. |
| DU R H, HU H F, GAO K, et al. Research on trajectory tracking control of autonomous vehicles based on MPC with variable predictive horizon[J]. Journal of Mechanical Engineering, 2022,58(24): 275-288. | |
| 8 | ZHANG B, ZONG C F, CHEN G Y, et al. An adaptive-prediction-horizon model prediction control for path tracking in a four-wheel independent control electric vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2019, 233(12): 3246-3262. |
| 9 | XIAO Z X, HU M H, FU C Y, et al. Model predictive trajectory tracking control of unmanned vehicles based on radial basis function neural network optimisation[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2023, 237(2-3): 347-361. |
| 10 | ELBANHAWI M, SIMIC M, JAZAR R. Receding horizon lateral vehicle control for pure pursuit path tracking[J]. Journal of Vibration and Control, 2018, 24(3): 619-642. |
| 11 | TANG X Z, SHI L F, WANG B, et al. Weight adaptive path tracking control for autonomous vehicles based on PSO-BP neural network[J]. Sensors, 2023, 23(1): 412. |
| 12 | 梁宝钰, 汪怡平, 刘珣, 等. 基于滑模理论的高速车辆侧风稳定性控制研究[J]. 汽车工程, 2022, 44(1): 123-130. |
| LIANG B Y, WANG Y P, LIU X, et al. Study on crosswind stability control of high-speed vehicle based on sliding mode theory[J]. Automotive Engineering, 2022,44(1): 123-130. | |
| 13 | JI J, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multi-constraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. |
| 14 | ZHAO F Z, WU W Y, WU Y, et al. Model predictive control of soft constraints for autonomous vehicle major lane-changing behavior with time variable model[J]. IEEE Access, 2021, 9: 89514-89525. |
| 15 | HU C F, ZHAO L X. Overtaking control strategy based on model predictive control with varying horizon for unmanned ground vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(1): 78-92. |
| 16 | WANG H R, WANG Q D, CHEN W W, et al. Path tracking based on model predictive control with variable predictive horizon[J]. Transactions of the Institute of Measurement and Control, 2021, 43(12): 2676-2688. |
| [1] | Lijun Qian,Jian Chen,Feng Zhao,Xinyu Chen,Liang Xuan. Research on Fast Stochastic Model Predictive Control-Based Eco-Driving Strategy for Connected Mixed Platoons [J]. Automotive Engineering, 2024, 46(9): 1587-1599. |
| [2] | Mo Han,Hongwen He,Man Shi,Wei Liu,Jianfei Cao,Jingda Wu. Research on Learning-Based Model Predictive Path Tracking Control for Autonomous Vehicles [J]. Automotive Engineering, 2024, 46(7): 1197-1207. |
| [3] | Guizhen Feng,Dongpeng Zhao,Shaohua Li. Research on Air Spring Modeling Based on Fractional Order and Electric Vehicle Active Suspension Control [J]. Automotive Engineering, 2024, 46(7): 1282-1293. |
| [4] | Liming Xiao,Fawang Zhang,Liangfa Chen,Haoqi Yan,Fei Ma,Shengbo Eben Li,Jingliang Duan. Vehicle Trajectory Tracking and Collision Avoidance Control Based on Multi-style Reinforcement Learning [J]. Automotive Engineering, 2024, 46(6): 945-955. |
| [5] | Shuen Zhao,Sheng Wang,Yao Leng. Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking [J]. Automotive Engineering, 2024, 46(5): 784-794. |
| [6] | Yichao He,Shengjie Kou,He Tian,Hao Li,Yong Lu. Research on Decision-Making and Planning Method for Intelligent Highway Lane-Changing System for Mass Production [J]. Automotive Engineering, 2024, 46(3): 418-430. |
| [7] | Zhihao Yu,Rongkang Luo,Peibao Wu,Zhichao Hou. Chassis Coordinated Control for Lateral Stability of Four-in-Wheel-Motor-Drive Vehicles [J]. Automotive Engineering, 2024, 46(10): 1733-1743. |
| [8] | Tong Wu,Jing Rong,Junnian Wang,Wen Sun,Liang Chu,Linhe Ge. Dynamic Braking Allocation Strategy for Turning-Braking Maneuver [J]. Automotive Engineering, 2024, 46(10): 1755-1765. |
| [9] | Shaobo Lu,Lingfeng Dai,Chenhui Wang,Bingjun Liu,Zhigang Chu,Wenke Xie. Trajectory Planning and Control of Autonomous Vehicle Under Extreme Conditions Based on Autonomous Drift [J]. Automotive Engineering, 2024, 46(10): 1780-1789. |
| [10] | Hongmao Qin,Shu Jiang,Tiantian Zhang,Heping Xie,Yougang Bian,Yang Li. Path Tracking Control of Intelligent Vehicle Based on Learning Model Predictive Control [J]. Automotive Engineering, 2024, 46(10): 1804-1815. |
| [11] | Zhong Zhang,Xiaojian Wu,Huihua Jiang,Chao Zhang,Yukang Wan. Model Predictive Anti-disturbance Control for Longitudinal Motion of Intelligent Vehicles Under Multi-source Disturbances [J]. Automotive Engineering, 2024, 46(10): 1816-1828. |
| [12] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [13] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [14] | Tao Lu,Xin Jin,Yifei Liao,Shengjie Huang,Yilin Yang,Guotao Xie,Xiaohui Qin. Visual SLAM Based on Jacobian Null-space Marginalization [J]. Automotive Engineering, 2023, 45(8): 1457-1467. |
| [15] | Wenguang Wu,Shuangyue Tian,Zhiyong Zhang,Bin Zhang. Research on Semantic Segmentation of Uneven Features of Unpaved Road [J]. Automotive Engineering, 2023, 45(8): 1468-1478. |