Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (7): 1197-1207.doi: 10.19562/j.chinasae.qcgc.2024.07.007
Mo Han1,Hongwen He1( ),Man Shi1,Wei Liu2,Jianfei Cao3,Jingda Wu4
),Man Shi1,Wei Liu2,Jianfei Cao3,Jingda Wu4
Received:2024-02-07
Revised:2024-03-22
Online:2024-07-25
Published:2024-07-22
Contact:
Hongwen He
E-mail:hwhebit@bit.edu.cn
Mo Han,Hongwen He,Man Shi,Wei Liu,Jianfei Cao,Jingda Wu. Research on Learning-Based Model Predictive Path Tracking Control for Autonomous Vehicles[J].Automotive Engineering, 2024, 46(7): 1197-1207.

"
"
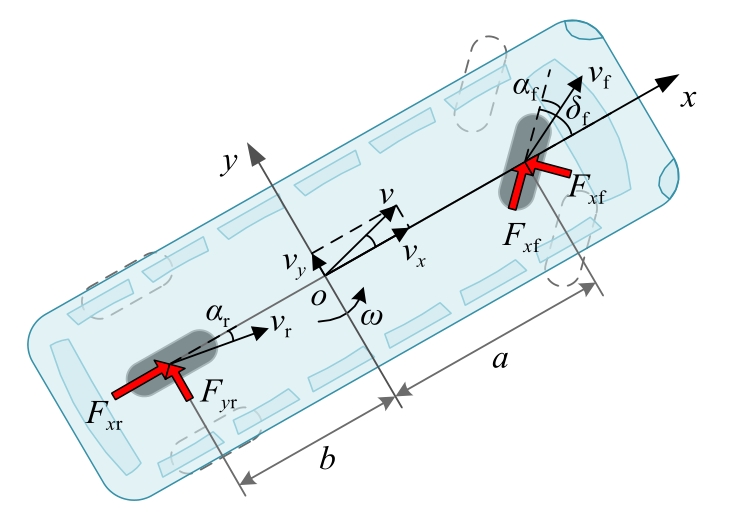
| 状态量含义 | 变量符号 | 变量表示 | 单位 |
|---|---|---|---|
| 横向车速 | vy | x1 | m/s |
| 横摆角速度 | ω | x2 | rad/s |
| 大地坐标系横坐标位置 | X | x3 | m |
| 大地坐标系纵坐标位置 | Y | x4 | m |
| 大地坐标系航向角 | θ | x5 | rad |
| 控制量含义 | 变量符号 | 变量表示 | 单位 |
| 前轮转向角 | δf | u | rad |

"

"


"


"

"


"


"
"
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 整备质量/kg | 10 850 | 迎风面积/m2 | 6.375 |
| 满载质量/kg | 16 500 | 转向系统传动比 | 22.15 |
| 风阻系数 | 0.4 | 轮胎滚阻系数 | 0.009 8 |
| 车辆长度/m | 10.5 | 轮距/m | 2.078 |
| 转向盘转角限值/(°) | ±800 | 轮胎侧偏刚度/ (N·rad-1) | 252 670 |
| 车轮滚动半径/m | 0.5 | z轴转动惯量/(kg·m2) | 12 800 |
"


"

"
"

"
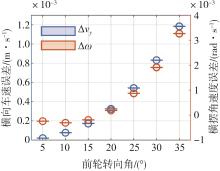
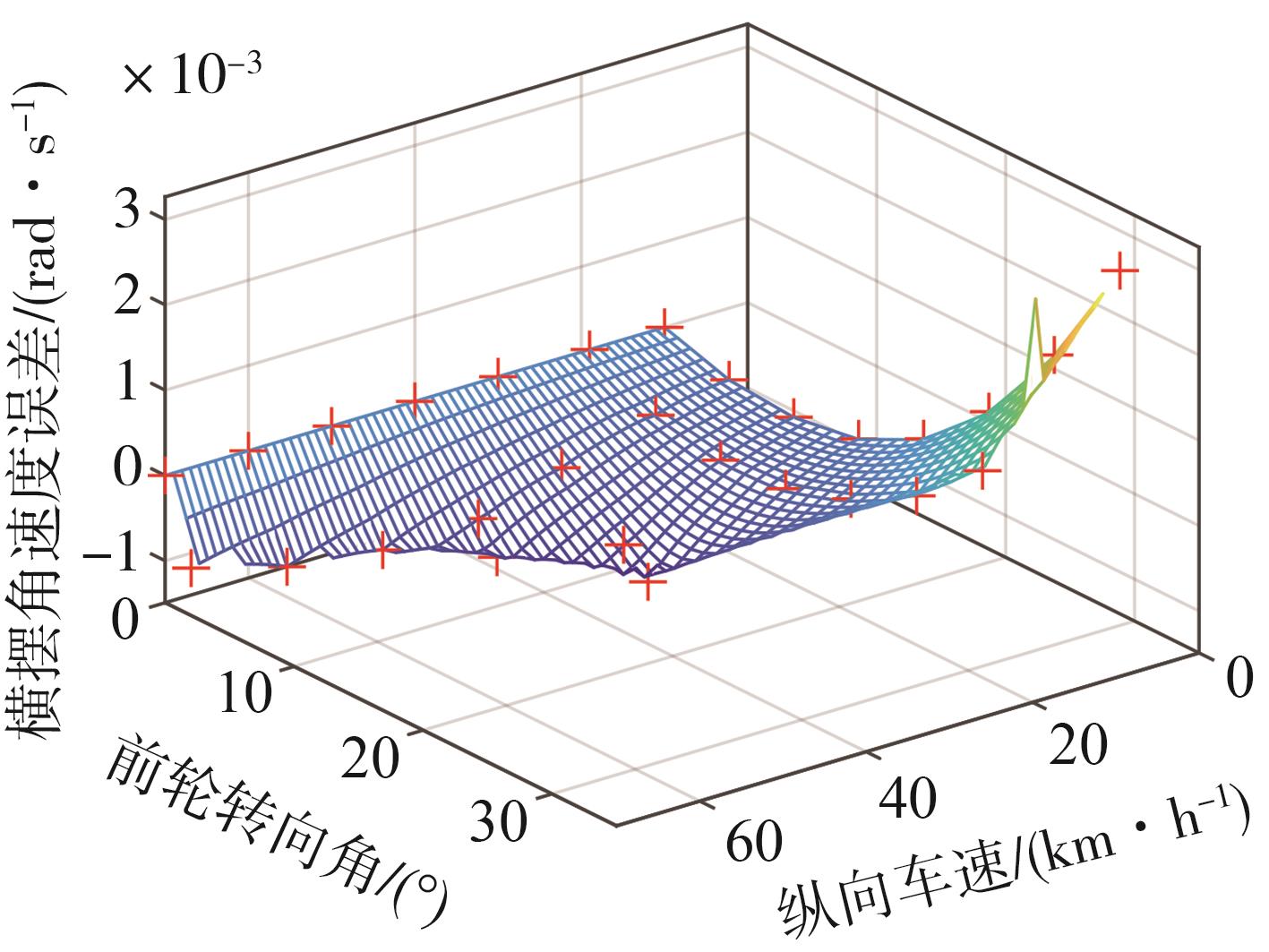
| 变量 | 模型 | 最大误差/ (m·s-1) | 平均误差/ (m·s-1) | 标准误差/ (m·s-1) |
|---|---|---|---|---|
| Δvy | 误差补偿模型 | 8.96×10-6 | 1.25×10-6 | 2.73×10-6 |
| 标称单轨模型 | 6.18×10-3 | 3.05×10-3 | 4.17×10-3 | |
| Δω | 误差补偿模型 | 4.27×10-6 | 5.94×10-7 | 1.19×10-6 |
| 标称单轨模型 | 2.34×10-3 | 1.09×10-3 | 1.43×10-3 |
"

"


"


"

"
| 路径跟踪策略 | 平均 误差/m | 最大 误差/m | 起始 误差/m | 误差均方根 | 控制量均方根 |
|---|---|---|---|---|---|
| MPC | 0.101 4 | 0.629 2 | 0.171 4 | 0.153 9 | 0.015 0 |
| LB-MPC | 0.132 8 | 1.278 8 | 0.146 3 | 0.230 5 | 0.012 3 |
| 1 | 国务院. 国务院关于印发“十四五”现代综合交通运输体系发展规划的通知[R]. 中华人民共和国国务院公报, 2022(4): 8-28. |
| The State Council. Notice of the state council on issuing the development plan for modern comprehensive transportation system during the 14th Five Year Plan Period[R]. The Bulletin of the State Council of the People's Republic of China, 2022(4): 8-28. | |
| 2 | 方培俊, 蔡英凤, 陈龙, 等. 基于车辆动力学混合模型的智能汽车轨迹跟踪控制方法[J]. 汽车工程, 2022, 44(10): 1469-1483,1510. |
| FANG P, CAI Y, CHEN L, et al. Trajectory tracking control method based on vehicle dynamics hybrid model for intelligent vehicle[J]. Automotive Engineering, 2022, 44(10): 1469-1483,1510. | |
| 3 | 陈慧岩, 陈舒平, 龚建伟. 智能汽车横向控制方法研究综述[J]. 兵工学报, 2017, 38(6): 1203-1214. |
| CHEN H, CHEN S, GONG J. A review on the research of lateral control for intelligent vehicles[J]. Acta Armamentarii, 2017, 38(6): 1203-1214. | |
| 4 | 陈慧岩, 熊光明, 龚建伟. 无人驾驶汽车概论[M]. 北京: 北京理工大学出版社, 2014. |
| CHEN H, XIONG G, GONG J. Introduction to self-driving car[M]. Beijing: Beijing Institute of Technology Press, 2014. | |
| 5 | 龚建伟, 龚乘, 林云龙, 等. 智能车辆规划与控制策略学习方法综述[J]. 北京理工大学学报, 2022, 42(7): 665-674. |
| GONG J, GONG S, LIN Y, et al. Review on machine learning methods for motion planning and control policy of intelligent vehicles[J]. Transactions of Beijing Institute of Technology, 2022, 42(7): 665-674. | |
| 6 | MAYNE D Q. Model predictive control: recent developments and future promise[J]. Automatica, 2014, 50(12): 2967-2986. |
| 7 | VEGAMOOR V K, DARBHA S, RAJAGOPAL K R. A review of automatic vehicle following systems[J]. Journal of the Indian Institute of Science, 2019, 99(4): 567-587. |
| 8 | AMER N H, ZAMZURI H, HUDHA K, et al. Modelling and control strategies in path tracking control for autonomous ground vehicles: a review of state of the art and challenges[J]. Journal of Intelligent & Robotic Systems, 2017, 86(2): 225-254. |
| 9 | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143. |
| XIONG L, YANG X, ZHUO G, et al. Review on motion control of autonomous vehicles[J]. Journal of Mechanical Engineering, 2020, 56(10): 127-143. | |
| 10 | ZHANG K, WANG J, XIN X, et al. A survey on learning-based model predictive control: toward path tracking control of mobile platforms[J]. Applied Sciences, 2022, 12(4): 1995. |
| 11 | JI J, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. |
| 12 | CHONG L, ABBAS M M, MEDINA FLINTSCH A, et al. A rule-based neural network approach to model driver naturalistic behavior in traffic[J]. Transportation Research Part C: Emerging Technologies, 2013, 32: 207-223. |
| 13 | LEFEVRE S, CARVALHO A, BORRELLI F. A learning-based framework for velocity control in autonomous driving[J]. IEEE Transactions on Automation Science and Engineering, 2016, 13(1): 32-42. |
| 14 | WU J, HUANG Z, LV C. Uncertainty-aware model-based reinforcement learning: methodology and application in autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(1): 194-203. |
| 15 | JI X, HE X, LV C, et al. Adaptive-neural-network-based robust lateral motion control for autonomous vehicle at driving limits[J]. Control Engineering Practice, 2018, 76: 41-53. |
| 16 | OSTAFEW C J, SCHOELLIG A P, BARFOOT T D. Robust constrained learning-based NMPC enabling reliable mobile robot path tracking[J]. The International Journal of Robotics Research, 2016, 35(13): 1547-1563. |
| 17 | WANG L, YANG S, YUAN K, et al. A combined reinforcement learning and model predictive control for car-following maneuver of autonomous vehicles[J]. Chinese Journal of Mechanical Engineering, 2023, 36(1): 80. |
| 18 | ALCALÁ E, BESSA I, PUIG V, et al. MPC using an on-line TS fuzzy learning approach with application to autonomous driving[J]. Applied Soft Computing, 2022, 130: 109698. |
| 19 | HEWING L, KABZAN J, ZEILINGER M N. Cautious model predictive control using gaussian process regression[J]. IEEE Transactions on Control Systems Technology, 2020, 28(6): 2736-2743. |
| 20 | OSTAFEW C J, SCHOELLIG A P, BARFOOT T D, et al. Learning-based nonlinear model predictive control to improve vision-based mobile robot path tracking[J]. Journal of Field Robotics, 2016, 33(1): 133-152. |
| 21 | KABZAN J, HEWING L, LINIGER A, et al. Learning-based model predictive control for autonomous racing[J]. IEEE Robotics and Automation Letters, 2019, 4(4): 3363-3370. |
| 22 | PICOTTI E, MION E, LIBERA A D, et al. A learning-based nonlinear model predictive controller for a real go-kart based on black-box dynamics modeling through gaussian processes[J]. IEEE Transactions on Control Systems Technology, 2023, 31(5): 2055-2065. |
| 23 | LIU W, LIU C, CHEN G, et al. Gaussian process based model predictive control for overtaking in autonomous driving[J]. Frontiers in Neurorobotics, 2021, 15: 723049. |
| 24 | HAN M, HE H, CAO J, et al. MPC-based lateral control algorithm for bus path following control[R]. Volume 9: Sustainable Energy Solutions for Changing the World: Part I, 2021. |
| 25 | HE H, HAN M, LIU W, et al. MPC-based longitudinal control strategy considering energy consumption for a dual-motor electric vehicle[J]. Energy, 2022, 253: 124004. |
| [1] | Shuen Zhao,Sheng Wang,Yao Leng. Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking [J]. Automotive Engineering, 2024, 46(5): 784-794. |
| [2] | Yichao He,Shengjie Kou,He Tian,Hao Li,Yong Lu. Research on Decision-Making and Planning Method for Intelligent Highway Lane-Changing System for Mass Production [J]. Automotive Engineering, 2024, 46(3): 418-430. |
| [3] | Yougang Bian,Tiantian Zhang,Heping Xie,Hongmao Qin,Zeyu Yang. Anti-disturbance and Anti-corner-cutting Control for Collaborative Path Tracking of Vehicle Platoon [J]. Automotive Engineering, 2023, 45(8): 1320-1332. |
| [4] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [5] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [6] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [7] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [8] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [9] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [10] | Bing Zhou,Jiabao Wei,Tian Chai,Xiaojian Wu,He Wang. Control Strategy of Assistant Driving for Post-impact Based on Optimal Method [J]. Automotive Engineering, 2023, 45(4): 561-571. |
| [11] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [12] | Ziwei Zhang,Ling Zheng,Yinong Li,Xuqiang Qiao,Hao Zheng,Kan Wang. A Multi-objective Adaptive Cruise Control Strategy for Autonomous Vehicle Considering Uncertain Movements of Preceding Vehicle [J]. Automotive Engineering, 2023, 45(3): 361-371. |
| [13] | Lin He,Ziang Xu,Chunrong Huang,Chao Gong,Shuhua Li,Qin Shi. Research on Sliding Mode Control Algorithm for Angle Tracking Prediction of Steer-by-wire System [J]. Automotive Engineering, 2023, 45(12): 2200-2208. |
| [14] | Lü Ying,Xu Qi,Qiuzheng Liu,Xinyu Wang,Guoying Chen. Path Tracking Control Method with Steering Lag for Autonomous Vehicles [J]. Automotive Engineering, 2023, 45(12): 2234-2241. |
| [15] | Jie Hu,Ruipeng Chen,Zhihao Zhang,Bowen Xiang,Haoyan Liu,Qi Zhu,Qixiang Guo. Path Tracking Control of Autonomous Truck Based on RMPC [J]. Automotive Engineering, 2023, 45(11): 2092-2103. |
|
||