Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (10): 1780-1789.doi: 10.19562/j.chinasae.qcgc.2024.10.006
Previous Articles Next Articles
Shaobo Lu1( ),Lingfeng Dai1,Chenhui Wang1,Bingjun Liu2,Zhigang Chu1,Wenke Xie1
),Lingfeng Dai1,Chenhui Wang1,Bingjun Liu2,Zhigang Chu1,Wenke Xie1
Received:2024-05-20
Revised:2024-07-16
Online:2024-10-25
Published:2024-10-21
Contact:
Shaobo Lu
E-mail:lsb@cqu.edu.cn
Shaobo Lu,Lingfeng Dai,Chenhui Wang,Bingjun Liu,Zhigang Chu,Wenke Xie. Trajectory Planning and Control of Autonomous Vehicle Under Extreme Conditions Based on Autonomous Drift[J].Automotive Engineering, 2024, 46(10): 1780-1789.

"

"


"


"

"
| 参数 | 数值 |
|---|---|
| 车辆质量m/kg | 1 501 |
| 质心距前轴距离a/m | 1.12 |
| 质心距后轴距离b/m | 1.50 |
| 转动惯量Iz /(kg·m2) | 1 816 |
| 前轮侧偏刚度CαF/(N·rad-1) | 141 643 |
| 后轮侧偏刚度CαR/(N·rad-1) | 112 441 |
| 预测步长Np | 12 |
| 控制步长Nc | 8 |
| 规划时间步长Tp/s | 0.01 |
| 控制时间步长Tc/s | 0.01 |
"

"
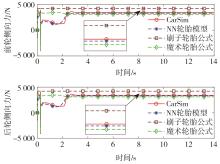
| 轮胎模型 | 最大误差/N | 稳态误差/N |
|---|---|---|
| 刷子轮胎公式 | 2 916.15 | 799.12 |
| 魔术轮胎公式 | 1 946.25 | 319.22 |
| NN轮胎模型 | 948.53 | 111.30 |
"

"
"
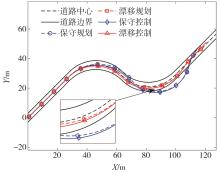
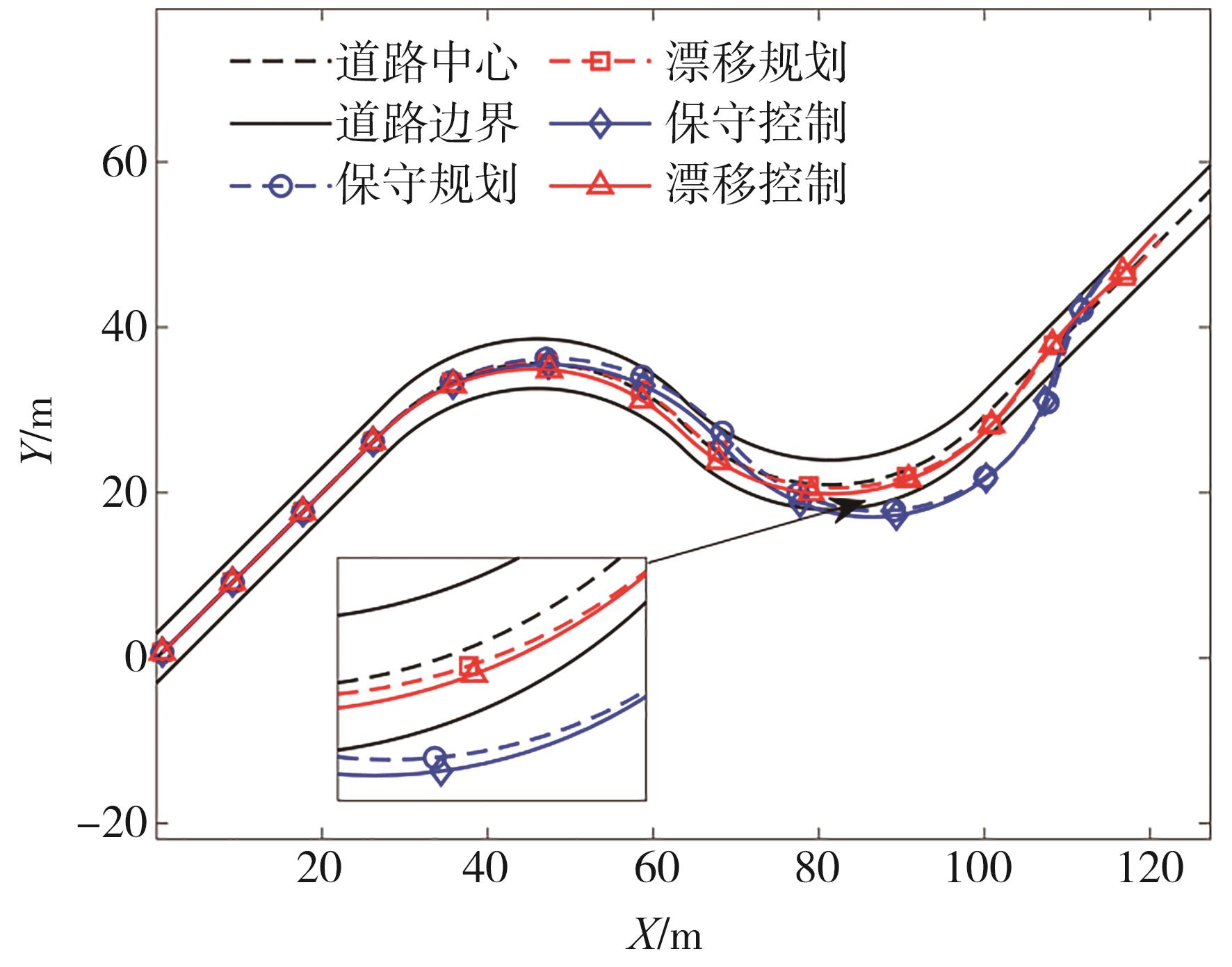
| 误差 | 保守稳定边界 | 漂移稳定边界 |
|---|---|---|
| 误差平均值/m | 1.41 | 0.44 |
| 误差最大值/m | 5.62 | 1.38 |

"


"


"

| 1 | ZHOU T, YANG M, JIANG K, et al. MMW radar-based technologies in autonomous driving: a review[J]. Sensors, 2020, 20(24): 7283. |
| 2 | Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles: SAE J3016_201609[S]. 2016. |
| 3 | 陈龙, 解云鹏, 蔡英凤, 等. 极限工况下无人驾驶车辆稳定跟踪控制[J]. 汽车工程, 2020, 42(8): 1016-1026. |
| CHEN L, XIE Y, CAI Y, et al. Stable tracking control of autonomous vehicles at extreme conditions [J]. Automotive Engineering, 2020, 42 (8): 1016-1026. | |
| 4 | 宋强, 王冠峰, 商赫, 等. 基于多参数控制的分布式驱动电动汽车操纵稳定性控制策略研究[J]. 汽车工程, 2023,45(11): 2104-2112,2138. |
| SONG Q, WANG G, SHANG H, et al. Research on control strategy for handling and stability of distributed drive electric vehicles based on multi parameter control [J]. Automotive Engineering, 2023,45(11): 2104-2112,2138. | |
| 5 | LIU C, LIU H, HAN L, et al. Multi-level coordinated yaw stability control based on sliding mode predictive control for distributed drive electric vehicles under extreme conditions[J]. IEEE Transactions on Vehicular Technology, 2022, 72(1): 280-296. |
| 6 | 张钰, 徐明帆, 白光宇, 等. 考虑稳定性约束的智能车辆切换控制方法[J]. 汽车工程, 2023, 45(5): 709-718. |
| ZHANG Y, XU M, BAI G, et al. An intelligent vehicle switching control method considering stability constraints [J]. Automotive Engineering, 2023, 45 (5): 709-718. | |
| 7 | LIANG Y, LI Y, YU Y, et al. Integrated lateral control for 4WID/4WIS vehicle in high-speed condition considering the magnitude of steering[J]. Vehicle System Dynamics, 2020, 58(11): 1711-1735. |
| 8 | GOH J Y M. Automated vehicle control beyond the stability limits[M]. Stanford University, 2019. |
| 9 | BALACHANDRAN A, CHEN T L, GOH J Y M, et al. Human-centric intelligent driving: collaborating with the driver to improve safety[C]. Automated Road Transportation Symposium. Cham: Springer International Publishing, 2021: 85-109. |
| 10 | HINDIYEH R Y, GERDES J C. Equilibrium analysis of drifting vehicles for control design[C]. Dynamic Systems and Control Conference, 2009, 48920: 181-188. |
| 11 | GOH J Y, GOEL T, CHRISTIAN J C. Toward automated vehicle control beyond the stability limits: drifting along a general path[J]. Journal of Dynamic Systems, Measurement, and Control, 2020, 142(2): 021004. |
| 12 | HOU X, ZHANG J, JI Y, et al. Autonomous drift controller for distributed drive electric vehicle with input coupling and uncertain disturbance[J]. ISA Transactions, 2022, 120: 1-17. |
| 13 | HINDIYEH R Y, GERDES J C. A controller framework for autonomous drifting: design, stability, and experimental validation[J]. Journal of Dynamic Systems, Measurement, and Control, 2014, 136(5): 051015. |
| 14 | QI Y, ZHANG Z, HU C, et al. An MPC-based controller framework for agile maneuvering of autonomous vehicles[C]. IEEE Intelligent Vehicles Symposium (IV), 2021: 1228-1234. |
| 15 | PARK M, KANG Y. Experimental verification of a drift controller for autonomous vehicle tracking: a circular trajectory using LQR method[J]. International Journal of Control, Automation and Systems, 2021, 19(1): 404-416. |
| 16 | JOA E, CHA H, HYUN Y, et al. A new control approach for automated drifting in consideration of the driving characteristics of an expert human driver[J]. Control Engineering Practice, 2020, 96: 104293. |
| 17 | ACOSTA M, KANARACHOS S. Teaching a vehicle to autonomously drift: a data-based approach using neural networks[J]. Knowledge-Based Systems, 2018, 153: 12-28. |
| 18 | ZHANG F, GONZALES J, LI S E, et al. Drift control for cornering maneuver of autonomous vehicles[J]. Mechatronics, 2018, 54: 167-174. |
| 19 | BROWN M, FUNKE J, ERLIEN S, et al. Safe driving envelopes for path tracking in autonomous vehicles[J]. Control Engineering Practice, 2017, 61: 307-316. |
| 20 | LI D, ZHANG J, LIN S. Planning and control of drifting-based collision avoidance strategy under emergency driving conditions[J]. Control Engineering Practice, 2023, 139: 105625. |
| 21 | ACOSTA M, KANARACHOS S, FITZPATRICK M E. A hybrid hierarchical rally driver model for autonomous vehicle agile maneuvering on loose surfaces[C]. International Conference on Informatics in Control, Automation and Robotics, 2017: 216-225. |
| 22 | 赵选铭.面向分布式驱动车辆的自动驾驶漂移避障算法研究[D]. 长春: 吉林大学, 2023. |
| ZHAO X. Research on autonomous drifting obstacle avoidance algorithm for distributed drive vehicles [D]. Changchun: Jilin University, 2023. | |
| 23 | 张放. 极限工况下自动驾驶车辆的轨迹规划与运动控制[D]. 北京: 清华大学, 2018. |
| ZHANG F. Trajectory planning and motion control for extreme maneuvers of autonomous vehicles[D]. Beijing: Tsinghua University, 2018. | |
| 24 | DAI L, LU S, XIE W, et al. Drift control of autonomous vehicle under extreme condition based on neural network tire model[C]. IEEE 7th CAA International Conference on Vehicular Control and Intelligence (CVCI), 2023: 1-6. |
| 25 | ACOSTA M, KANARACHOS S. Tire lateral force estimation and grip potential identification using neural networks, extended Kalman filter, and recursive least squares[J]. Neural Computing and Applications, 2018, 30: 3445-3465. |
| [1] | Dongxu Su,Zhiguo Zhao,Kun Zhao,Gang Li,Qin Yu. Tube-MPC Vehicle Stability Control Based on Stability Domain Division in Extension Phase Plane [J]. Automotive Engineering, 2024, 46(9): 1654-1667. |
| [2] | Liming Xiao,Fawang Zhang,Liangfa Chen,Haoqi Yan,Fei Ma,Shengbo Eben Li,Jingliang Duan. Vehicle Trajectory Tracking and Collision Avoidance Control Based on Multi-style Reinforcement Learning [J]. Automotive Engineering, 2024, 46(6): 945-955. |
| [3] | Shuen Zhao,Sheng Wang,Yao Leng. Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking [J]. Automotive Engineering, 2024, 46(5): 784-794. |
| [4] | Bing Zhou,Kangqiang Zheng,Ru Wang,Xiaojian Wu,Tian Chai. Adaptive Collision Avoidance Control Considering Available Road Width [J]. Automotive Engineering, 2024, 46(5): 893-905. |
| [5] | Zhiqun Yuan,Yanqiang Chen,Yuxuan Chang,Diansheng Huo,Li Lin. Model Predictive Control with Adaptive Horizon for Vehicle Trajectory Tracking Considering Crosswind Stability [J]. Automotive Engineering, 2024, 46(10): 1829-1841. |
| [6] | Yunfei Zha,Lü Xiaolong,Huiqin Chen,Yingchun Yi,Yanyan Wang. Vehicle Trajectory Tracking Control Based on Road Adhesion Coefficient Estimation [J]. Automotive Engineering, 2023, 45(6): 1010-1021. |
| [7] | Yinghong Yu,Li Huang,Yinong Li,Ling Zheng,Jia Zhou,Yixiao Liang. Research on Emergency Trajectory Tracking Control Based on Dynamics Decoupling [J]. Automotive Engineering, 2023, 45(6): 997-1009. |
| [8] | Yilin He,Jian Ma,Shukai Yang,Wei Zheng,Qifan Xue. Research on Stability Model Predictive Control of Intelligent Electric Vehicle with Preview Characteristics [J]. Automotive Engineering, 2023, 45(5): 719-734. |
| [9] | Bin Zhang,Yuan Zou,Xudong Zhang,Fengchun Sun,Zhe Wu,Yihao Meng. Research on Trajectory Tracking Control of Hybrid Tracked Unmanned Platform [J]. Automotive Engineering, 2023, 45(4): 579-587. |
| [10] | Qin Li,Jianming Tang,Boyuan Zhang,Yong Chen,Yong Wang. Research on Fault-Tolerant Control of Multi-Actuator for Distributed Drive Electric Vehicles [J]. Automotive Engineering, 2023, 45(12): 2251-2259. |
| [11] | Pulei Xu,Yingfeng Cai,Yubo Lian,Xiaoqiang Sun,Hai Wang,Long Chen,Yilin Zhong. AFS/DYC Coordinated Control of Intelligent Vehicles Based on Improved Hierarchical Extensibility Theory [J]. Automotive Engineering, 2023, 45(1): 20-31. |
| [12] | Daofei Li,Anfei Zha,Biao Xu,Jiajie Zhang. Trajectory Tracking Control Algorithm of Emergency Collision Avoidance for Tractor Semi-trailer Combination [J]. Automotive Engineering, 2022, 44(7): 1098-1106. |
| [13] | Sensen Cong,Feng Gao,Shucai Xu. Cooperative Control of Vehicle Lateral and Longitudinal Stability Based on Dynamic Stability Region [J]. Automotive Engineering, 2022, 44(6): 900-908. |
| [14] | Peijun Fang,Yingfeng Cai,Long Chen,Yubo Lian,Hai Wang,Yilin Zhong,Xiaoqiang Sun. Trajectory Tracking Control Method Based on Vehicle Dynamics Hybrid Model for Intelligent Vehicle [J]. Automotive Engineering, 2022, 44(10): 1469-1483. |
| [15] | Shaobo Lu,Feifei Xie,Bohan Zhang,Jiafeng Lu,Caixia Li. Human-Vehicle Cooperative Game Collision Avoidance Based on Asymmetric Potential Fields [J]. Automotive Engineering, 2022, 44(10): 1484-1493. |