Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (10): 1790-1803.doi: 10.19562/j.chinasae.qcgc.2024.10.007
Previous Articles Next Articles
Hang Wan,Shida Nie( ),Hui Liu,Fawang Zhang,Changle Xiang,Lijin Han
),Hui Liu,Fawang Zhang,Changle Xiang,Lijin Han
Received:2024-06-02
Revised:2024-07-17
Online:2024-10-25
Published:2024-10-21
Contact:
Shida Nie
E-mail:nieshida@bit.edu.cn
Hang Wan,Shida Nie,Hui Liu,Fawang Zhang,Changle Xiang,Lijin Han. A Cascade Control Scheme for Path Tracking with Model Predictive Path Integral and Output Regulator[J].Automotive Engineering, 2024, 46(10): 1790-1803.
"

"
"
| 控制方法 | 拉格朗日-海森 矩阵非零数 | 求解时间/s |
|---|---|---|
| 层级控制(MPPI) | 41 | 0.01+0.001 |
| 层级控制(NLP) | 439 | 0.021+0.001 |
| 单回路(LMPC) | 610 | 0.032 |
"
"
"
平均跟踪 误差/m | ||||||||
|---|---|---|---|---|---|---|---|---|
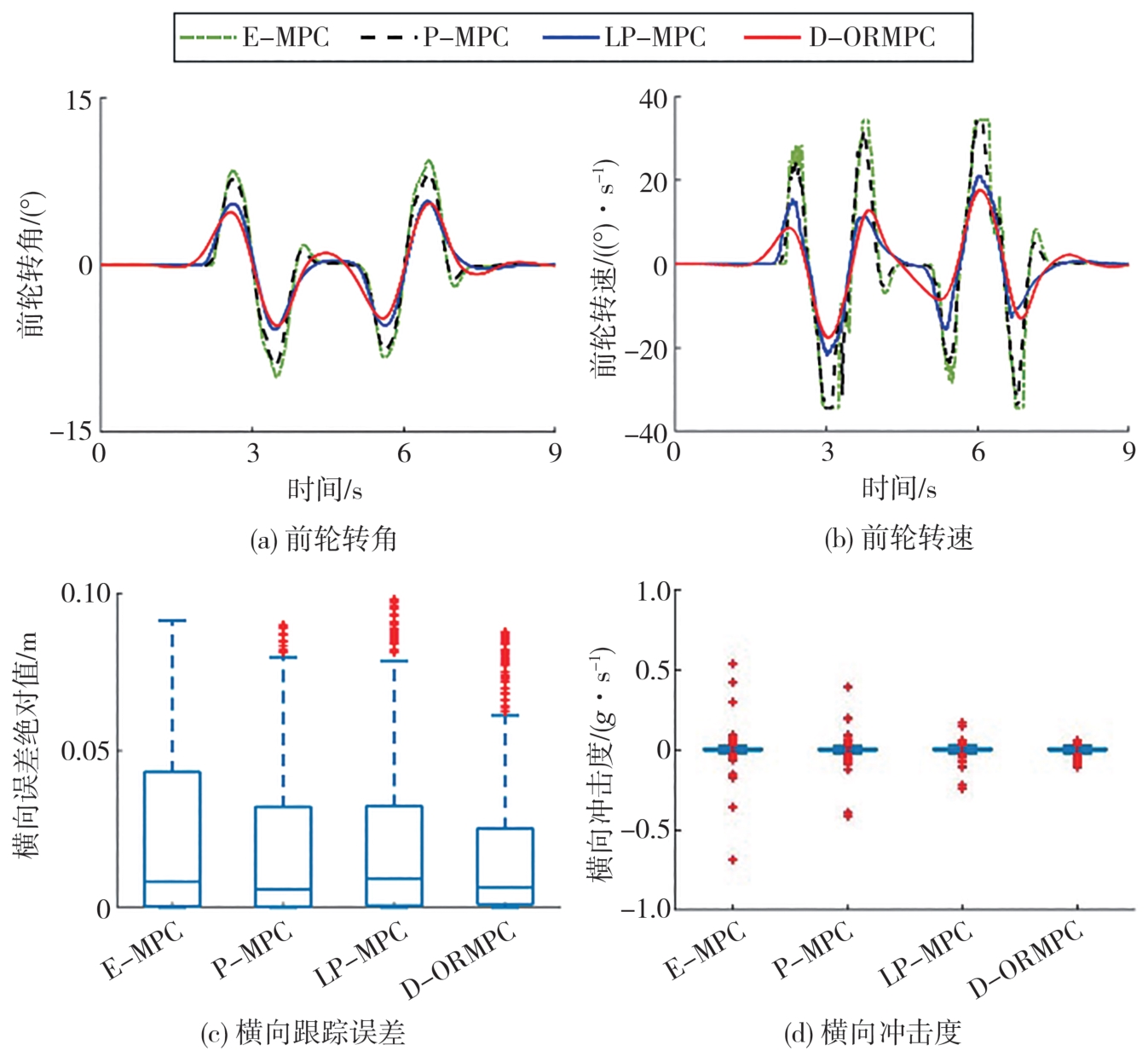
| EMPC | 0.015 1 | 0.019 8 | 0.106 9 | 0.107 4 | 0.093 0 | 0.093 2 | 0.072 8 | |
| P-MPC | 0.015 1 | 0.019 8 | 0.106 9 | 0.107 3 | 0.122 5 | 0.119 0 | 0.090 5 | 0.090 7 |
| LP-MPC | 0.034 3 | 0.018 9 | 0.133 4 | 0.135 3 | 0.122 7 | 0.123 6 | 0.103 6 | 0.105 0 |
| D-ORMPC | 0.012 3 | 0.009 1 | 0.017 8 | 0.017 0 | 0.019 7 | 0.018 5 | 0.031 5 | 0.027 9 |

"

"
"

"
"
"
| 1 | PADEN B, ČÁP M, YONG S Z, et al. A survey of motion planning and control techniques for self-driving urban vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 33-35. |
| 2 | WATZENIG D, HORN H. Automated driving: safer and more efficient future driving[M]. Springer Cham, 2016. |
| 3 | AMER N H, ZAMZURI H, HUDHA K, et al. Modelling and control strategies in path tracking control for autonomous ground vehicles: a review of state of the art and challenges[J]. Journal of Intelligent & Robotic Systems, 2017, 86: 225-254. |
| 4 | DUAN J L, GUAN Y, LI S E, et al. Distributional soft actor-critic: off-policy reinforcement learning for addressing value estimation errors [J]. IEEE Transactions on Neural Networks and Learning Systems, 2022, 33(11): 6584-6598. |
| 5 | LIN Z Y, MA J, DUAN J L, et al. Policy iteration based approximate dynamic programming toward autonomous driving in constrained dynamic environment[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(5): 5003-5013. |
| 6 | LIU M, ZHAO F, YIN J L, et al. Reinforcement- tracking: an effective trajectory tracking and navigation method for autonomous urban driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 6991-7007. |
| 7 | SHAN Y X, ZHENG B L, CHEN L S, et al. A reinforcement learning-based adaptive path tracking approach for autonomous driving[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 10581-10595. |
| 8 | 杜国栋, 邹渊, 张旭东, 等. 基于双估计强化学习结合前向预测控制的自动驾驶运动控制研究[J]. 汽车工程, 2024, 46(4): 564-576. |
| DU G D, ZOU Y, ZHANG X D, et al. Research on automatic driving motion control based on double estimator reinforcement learning combined with forward predictive control[J]. Automotive Engineering, 2024, 46(4): 564-576. | |
| 9 | XU S B, PENG H. Design, analysis, and experiments of preview path tracking control for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 48-58. |
| 10 | XU S B, PENG H, TANG Y F. Preview path tracking control with delay compensation for autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(5): 2979-2989. |
| 11 | BORRELLI F, FALCONE P, KEVICZKY T, et al. MPC-based approach to active steering for autonomous vehicle systems[J]. International Journal of Vehicle Autonomous Systems, 2005, 3(2-4): 265-291. |
| 12 | FALCONE P, BORRELLI F, ASGARI J, et al. Predictive active steering control for autonomous vehicle systems[J]. IEEE Transactions on Control Systems Technology, 2007, 15(3): 566-580. |
| 13 | FALCONE P, BORRELLI F, TSENG H E, et al. A hierarchical model predictive control framework for autonomous ground vehicles[C]. American Control Conference (ACC), 2008: 3719-3724. |
| 14 | TIAN Y, YAO Q Q, HANG P, et al. A gain-scheduled robust controller for autonomous vehicles path tracking based on LPV system with MPC and H∞[J]. IEEE Transactions on Vehicular Technology, 2022, 71(9): 9350-9362. |
| 15 | CAI G S, XU L W, LIU Y, et al. Robust preview path tracking control of autonomous vehicles under time-varying system delays and saturation[J]. IEEE Transactions on Vehicular Technology, 2023, 72(7): 8486-8499. |
| 16 | KIM B, NECSULESCU D, SASIADEK J. Model predictive control of an autonomous vehicle[C]. IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Proceedings, 2001, 2(2): 1279-1284. |
| 17 | KOUBAA Y, BOUKATTAYA M, DAMMAK T. Adaptive sliding-mode dynamic control for path tracking of nonholonomic wheeled mobile robot[J]. Journal of Automation and Systems Engineering, 2015, 9(2): 119-131. |
| 18 | RAFFO G V, GOMES G K, NORMEY-RICO J E, et al. A predictive controller for autonomous vehicle path tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(1): 92-102. |
| 19 | BRÜDIGAM T, PRADER D, WOLLHERR D, et al. Model predictive control with models of different granularity and a non-uniformly spaced prediction horizon[C]. American Control Conference (ACC), 2021: 3876-3881. |
| 20 | ZHANG X X, CHENG Z L, MA J, et al. Semi-definite relaxation-based admm for cooperative planning and control of connected autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 9240-9251. |
| 21 | LAURENSE V A, GERDES J C. Long-horizon vehicle motion planning and control through serially cascaded model complexity[J]. IEEE Transactions on Control Systems Technology, 2022, 30(1): 166-179. |
| 22 | FUNKE J, BROWN M, ERLIEN S M, et al. Collision avoidance and stabilization for autonomous vehicles in emergency scenarios[J]. IEEE Transactions on Control Systems Technology, 2017, 25(4): 1204-1216. |
| 23 | 刘凯, 陈慧岩, 龚建伟, 等. 高速无人驾驶车辆的操控稳定性研究[J]. 汽车工程, 2019, 41(5): 514-521. |
| LIU K, CHEN H Y, GONG J W, et al. A research on handling stability of high-speed unmanned vehicles[J]. Automotive Engineering, 2019, 41(5): 514-521. | |
| 24 | TANG L, YAN F, ZOU B, et al. An improved kinematic model predictive control for high-speed path tracking of autonomous vehicles[J]. IEEE Access, 2020, 8: 51400-51413. |
| 25 | CAMPBELL S F. Steering control of an autonomous ground vehicle with application to the DARPA-URBAN challenge[D]. Massachusetts Institute of Technology, 2007. |
| 26 | CHEN C, TAN H S. Steering control of high-speed vehicles: dynamic look ahead and yaw rate feedback[C]. Proceedings of the 37th IEEE Conference on Decision and Control, 1998,1: 1025-1030. |
| 27 | CHEN C, TAN H S. Experimental study of dynamic look-ahead scheme for vehicle steering control[C]. American Control Conference (ACC), 1999, 5: 3163-3167. |
| 28 | WANG Y, JIANG S, LIN W, et al. A learning-based automatic parameters tuning framework for autonomous vehicle control in large scale system deployment[C]. American Control Conference (ACC), 2021: 2919-2926. |
| 29 | LUCCHINI A, FORMENTIN S, CORNO M, et al. Torque vectoring for high-performance electric vehicles: an efficient MPC calibration[J]. IEEE Control Systems Letters, 2020, 4(3): 725-730. |
| 30 | KHOSRAVI M, BEHRUNANI V N, MYSZKOROWSKI P, et al. Performance-driven cascade controller tuning with Bayesian optimization[J]. IEEE Transactions on Industrial Electronics, 2022, 69(1): 1032-1042. |
| 31 | HU C, WANG R, YAN F J, et al. Should the desired heading in path following of autonomous vehicles be the tangent direction of the desired path[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(6): 3084-3094. |
| 32 | SCHRAMM D, HILLER M, BARDINI R. Vehicle dynamics: modeling and simulation[M]. Berlin, Germany: Springer, 2014. |
| 33 | LUCA A D, ORIOLO G, SAMSON C. Feedback control of a nonholonomic car-like robot[M]. Berlin, Germany: Springer, 1998: 171-253. |
| 34 | WILLIAMS G, DREWS P, GOLDFAIN B, et al. Information-theoretic model predictive control: theory and applications to autonomous driving[J]. IEEE Transactions on Robotics, 2018, 34(6): 1603-1622. |
| 35 | STELLATO B, BANJAC G, GOULART P, et al. OSQP: an operator splitting solver for quadratic programs[J]. Mathematical Programming Computation, 2020, 12(4): 637-672. |
| 36 | RAJAMANI R. Vehicle dynamics and control[M]. 2rd ed. New York: Springer, 2011: 15-46. |
| 37 | WINKEL K N, IRMAK T, HAPPEE R, et al. Standards for passenger comfort in automated vehicles: acceleration and jerk[J]. Applied Ergonomics, 2023, 106: 103881. |
| 38 | BAE I, MOON J, JHUNG J, et al. Self-driving like a human driver instead of a robocar: personalized comfortable driving experience for autonomous vehicles [DB/OL]. (2022-11-18). https://arxiv.org/abs/2001.03908. |
| [1] | Daofei Li,Hao Pan. Application of Scenario Complexity Evaluation in Trajectory Prediction and Automated Driving Decision-Making [J]. Automotive Engineering, 2024, 46(9): 1556-1563. |
| [2] | Hai Wang,Jianguo Li,Yingfeng Cai,Long Chen. A LiDAR-Based Dynamic Driving Scene Multi-task Segmentation Network [J]. Automotive Engineering, 2024, 46(9): 1608-1616. |
| [3] | Jianan Zhang,Zhaozheng Hu,Jie Meng,Huahua Hu,Jie Zuo. Distributed Simulation Platform Architecture and Application of Autonomous Driving for Vehicle-Road-Map Collaboration [J]. Automotive Engineering, 2024, 46(8): 1335-1345. |
| [4] | Le Tao,Hai Wang,Yingfeng Cai,Long Chen. Multi-object Detection Algorithm Based on Point Cloud for Autonomous Driving Scenarios [J]. Automotive Engineering, 2024, 46(7): 1208-1218. |
| [5] | Linhui Li,Yifan Fu,Ting Wang,Xuecheng Wang,Jing Lian. Trajectory Prediction Method Enhanced by Self-supervised Pretraining [J]. Automotive Engineering, 2024, 46(7): 1219-1227. |
| [6] | Hai Wang,Yuxuan Ding,Tong Luo,Meng Qiu,Yingfeng Cai,Long Chen. A Multi-class Multi-target Tracking Algorithm Combining Motion Speed and Appearance Features in Driving Scenarios [J]. Automotive Engineering, 2024, 46(6): 956-964. |
| [7] | Jing Huang,Xiangzhen Liu,Xiaoyang Deng,Ran Chen. Research on Intelligent Vehicle Trajectory Planning Based on Multimodal Trajectory Prediction [J]. Automotive Engineering, 2024, 46(6): 965-974. |
| [8] | Fuxing Yao,Chao Sun,Yungang Lan,Bing Lu,Bo Wang,Haiyang Yu. A Lane Change Decision Method for Intelligent Connected Vehicles Based on Mixture of Expert Model [J]. Automotive Engineering, 2024, 46(5): 882-892. |
| [9] | Mengfan Li,Zhongxiang Feng,Weihua Zhang,Jingyu Li. Study on Driver's Visual Transfer Characteristics During the Takeover Process of Human-Computer Co-driving Mode [J]. Automotive Engineering, 2024, 46(5): 795-804. |
| [10] | Ting Chikit,Yafei Wang,Yichen Zhang,Mingyu Wu,Yile Wang. Energy-Saving Planning Method for Autonomous Driving Mining Trucks Based on Composite Dynamic Sampling [J]. Automotive Engineering, 2024, 46(4): 588-595. |
| [11] | Yiwei Zhou,Mo Xia,Bing Zhu. Multimodal Vehicle Trajectory Prediction Methods Considering Multiple Traffic Participants in Urban Road Scenarios [J]. Automotive Engineering, 2024, 46(3): 396-406. |
| [12] | Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction [J]. Automotive Engineering, 2024, 46(2): 230-240. |
| [13] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [14] | Weiguo Liu,Zhiyu Xiang,Weiping Liu,Daoxin Qi,Zixu Wang. Research on Vehicle Control Algorithm Based on Distributed Reinforcement Learning [J]. Automotive Engineering, 2023, 45(9): 1637-1645. |
| [15] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |