Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (3): 396-406.doi: 10.19562/j.chinasae.qcgc.2024.03.003
Yiwei Zhou1,2,Mo Xia1,Bing Zhu3( )
)
Received:2023-08-13
Revised:2023-11-22
Online:2024-03-25
Published:2024-03-18
Contact:
Bing Zhu
E-mail:zhubing@jlu.edu.cn
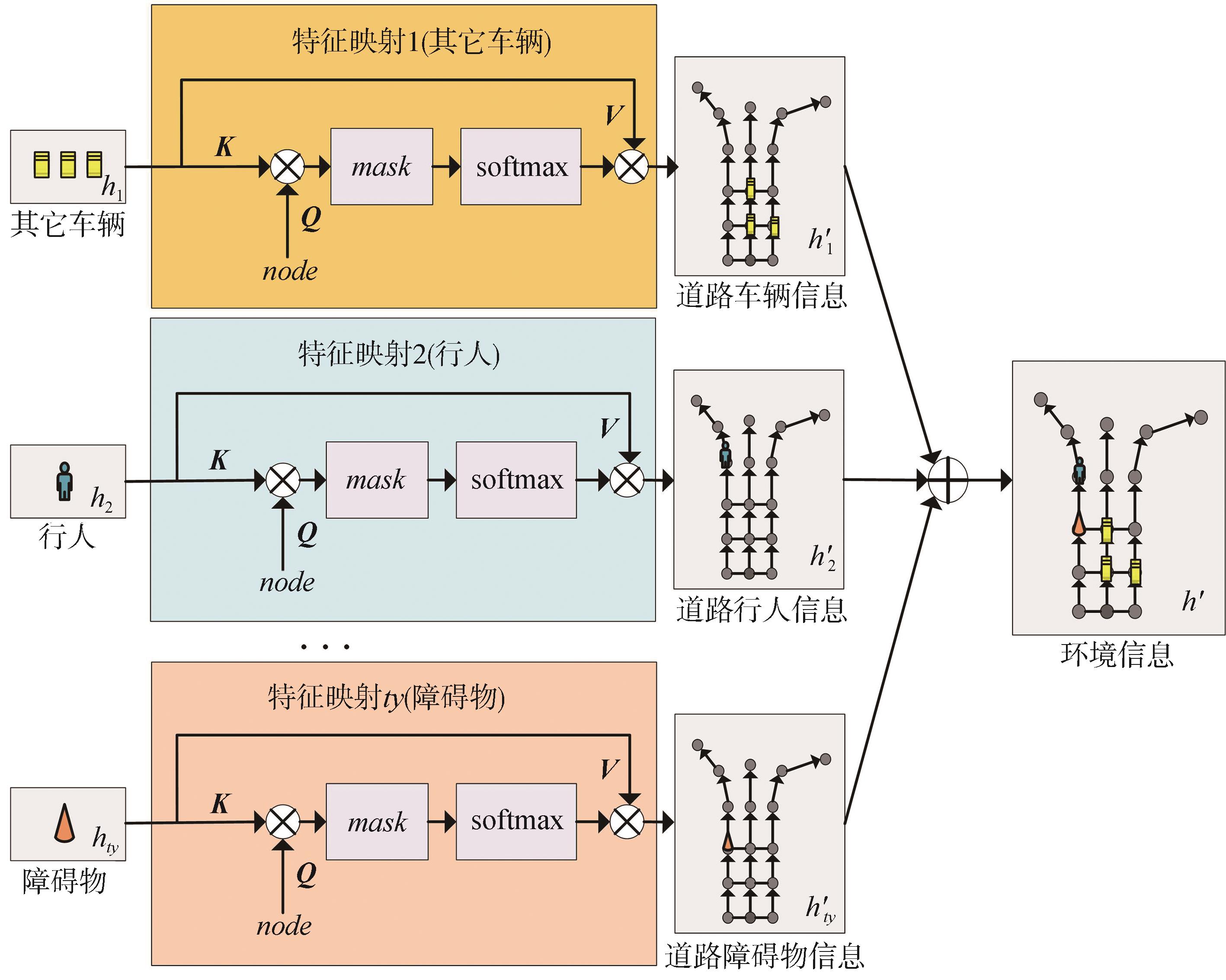
Yiwei Zhou,Mo Xia,Bing Zhu. Multimodal Vehicle Trajectory Prediction Methods Considering Multiple Traffic Participants in Urban Road Scenarios[J].Automotive Engineering, 2024, 46(3): 396-406.
"
"

"
"
"
"
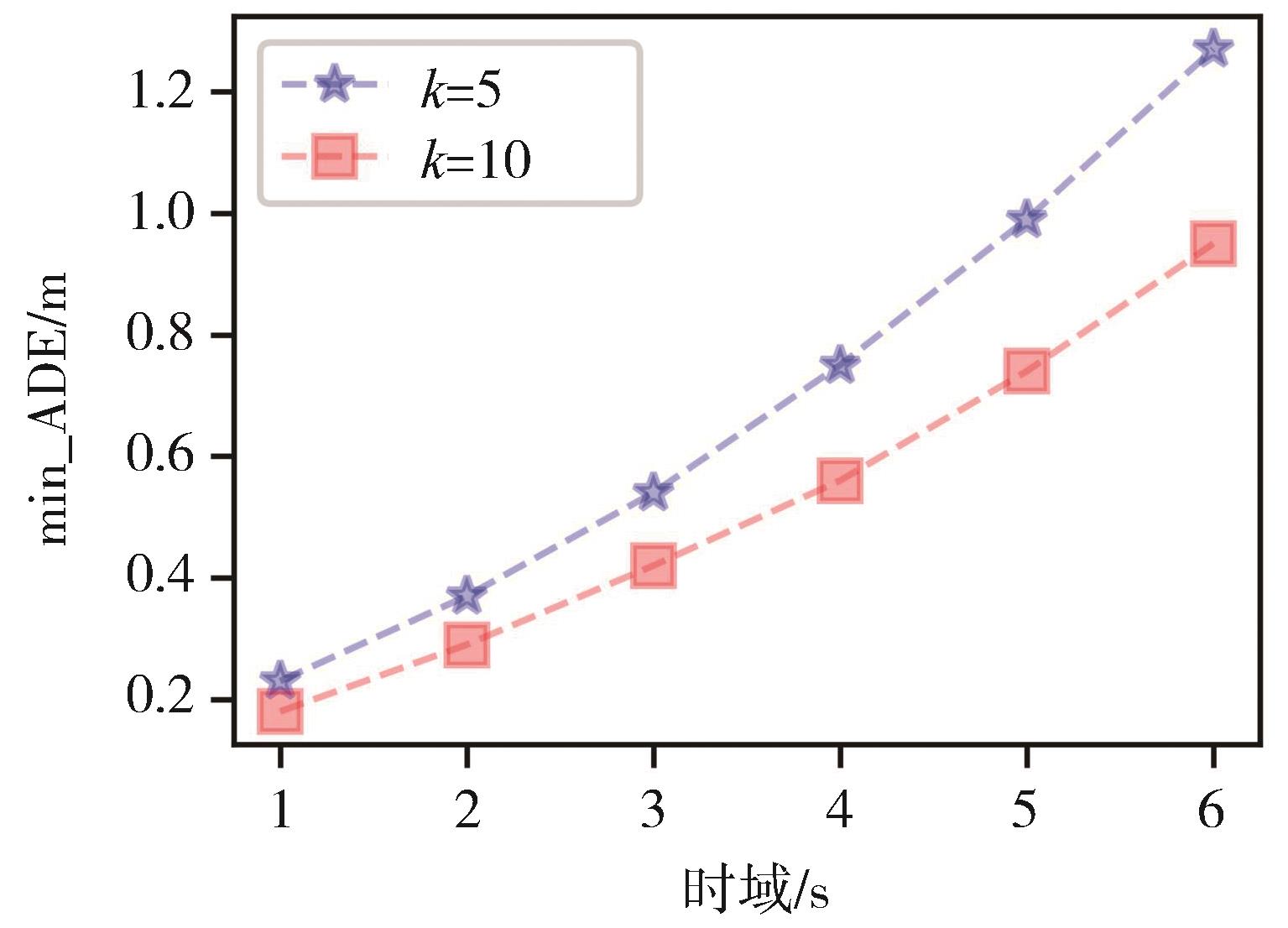
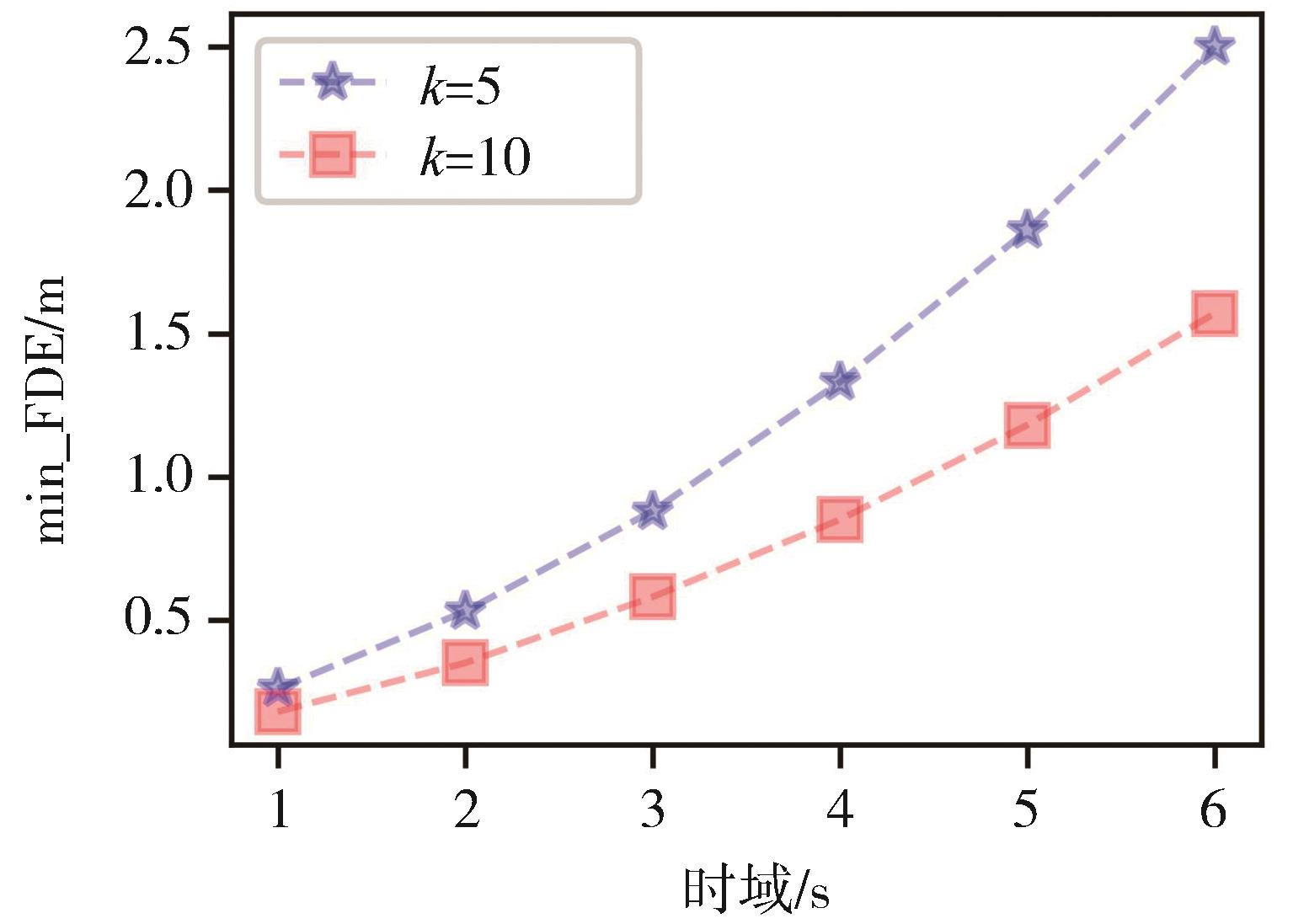
| 5 | 0.5 | 1.29 | 2.53 | 0.52 |
| 0.3 | 1.26 | 2.45 | 0.52 | |
| 0.1 | 1.27 | 2.48 | 0.52 | |
| 0.05 | 1.28 | 2.49 | 0.54 | |
| 10 | 0.5 | 0.97 | 1.62 | 0.35 |
| 0.3 | 0.94 | 1.54 | 0.33 | |
| 0.1 | 0.94 | 1.55 | 0.33 | |
| 0.05 | 0.96 | 1.58 | 0.35 | |
| 15 | 0.5 | 0.89 | 1.35 | 0.30 |
| 0.3 | 0.87 | 1.31 | 0.27 | |
| 0.1 | 0.88 | 1.34 | 0.27 | |
| 0.05 | 0.88 | 1.35 | 0.28 |
"
| 模型 | ||||||
|---|---|---|---|---|---|---|
| 不考虑交通参与者 | 1.36 | 2.69 | 0.59 | 0.99 | 1.68 | 0.39 |
| 车辆 | 1.28 | 2.50 | 0.54 | 0.95 | 1.58 | 0.35 |
| 车辆+行人 | 1.26 | 2.45 | 0.52 | 0.94 | 1.54 | 0.33 |
| 车辆+行人+障碍物 | 1.26 | 2.46 | 0.52 | 0.94 | 1.55 | 0.34 |
"
"
"
"
| 模型 | ||||
|---|---|---|---|---|
| Trajctron++ | 1.88 | 0.70 | 1.51 | 0.57 |
| LaPred | 1.53 | 0.53 | 1.12 | 0.46 |
| P2T | 1.45 | 0.64 | 1.16 | 0.46 |
| GOHOME | 1.42 | 0.57 | 1.15 | 0.47 |
| AutoBot | 1.37 | 0.62 | 1.03 | 0.44 |
| THOMAS | 1.33 | 0.57 | 1.04 | 0.42 |
| PGP | 1.30 | 0.61 | 1.00 | 0.37 |
| LAformer | 1.19 | 0.48 | 0.93 | 0.33 |
| 本模型 | 1.26 | 0.52 | 0.94 | 0.33 |
"
"
| 1 | YURTSEVER E, LAMBERT J, CARBALLO A, et al. A survey of autonomous driving: common practices and emerging technologies[J]. IEEE Access, 2019, 8: 58443-58469. |
| 2 | 段续庭, 周宇康, 田大新, 等. 深度学习在自动驾驶领域应用综述[J]. 无人系统技术, 2021, 4(6): 1-27. |
| DUAN X T, ZHOU Y K, TIAN D X, et al. A review of deep learning applications for autonomous driving[J]. Unmanned Systems Technology, 2021, 4(6): 1-27. | |
| 3 | TONG Y, LI C, WANG G, et al. Lntegrated path-following and fault-tolerant control for four-wheel lndependent-driving electric vehicles[J]. Automotive Innovation, 2022, 5(3): 311-323. |
| 4 | LIANG Y, LI Y, YU Y, et al. Path-following control of autonomous vehicles considering coupling effects and multi-source system uncertainties[J]. Automotive Innovation, 2021,4(3): 284-300. |
| 5 | ZHANG P, ZHU B, ZHAO J, et al. Performance evaluation method for automated driving system in logical scenario[J]. Automotive Innovation, 2022, 5(3): 299-310. |
| 6 | HOSS M, SCHOLTES M, ECKSTEIN L. A review of testing object-based environment perception for safe automated driving[J]. Automotive Innovation, 2022, 5: 223-250. |
| 7 | 黄峻, 田永林, 戴星原, 等. 基于深度学习的自动驾驶多模态轨迹预测方法:现状及展望[J]. 智能科学与技术学报, 2023, 5(2): 180-199. |
| HUANG J, TIAN Y L, DAI X Y, et al. Deep learning-based multimodal trajectory prediction methods for autonomous driving: state of the art and perspectives[J]. Chinese Journal of Intelligent Science and Technology, 2023, 5(2): 180-199. | |
| 8 | 陈瑞祥, 刘金广, 朱新宇. 面向城市交通组织的交通参与者行为特征差异研究[J]. 交通工程, 2022, 22(3): 52-58,76. |
| CHEN R X, LIU J G, ZHU X Y. Differences in behavior characteristics of traffic participants for urban traffic organization[J]. Journal of Transportation Engineering, 2022, 22(3): 52-58,76. | |
| 9 | PARK S, KIM B, KANG C M, et al. Sequence-to-sequence prediction of vehicle trajectory via lstm encoder-decoder architecture[C]. 2018 IEEE Intelligent Vehicles Symposium, 2018: 1672-1678. |
| 10 | 季学武, 费聪, 何祥坤, 等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32(6): 34-42. |
| JI X W, FEI C, HE X K, et al. Intention recognition and trajectory prediction for vehicles using LSTM network[J]. China Joural of Highway and Transport, 2019, 32(6): 34-42. | |
| 11 | DEO N, TRIVEDI M M. Convolutional social pooling for vehicle trajectory prediction[C]. IEEE/CVF Conference on Computer Vision, 2018: 1549-15498. |
| 12 | 高镇海, 鲍明喜, 高菲, 等. 基于LSTM概率多模态预期轨迹预测方法[J]. 汽车工程, 2023, 45(7):1145-1152. |
| GAO Z H, BAO X M, GAO F, et al. The method of probabilistic multi-modal expected trajectory prediction based on LSTM[J]. Automotive Engineering, 2023, 45(7): 1145-1152. | |
| 13 | CHUNG J, GÜLÇEHRE Ç, CHO K, et al. Empirical evaluation of gated recurrent neural networks on sequence modeling[J]. arXiv preprint arXiv: , 2014. |
| 14 | DEO N, WOLFF E M, BEIJBOM O. Multimodal trajectory prediction conditioned on lane-graph traversals[C]. Conference on Robot Learning, 2021. |
| 15 | HAO Z, HUANG X, WANG K, et al. Attention -based GRU for driver intention recognition and vehicle trajectory prediction[C]. 4th CAA International Conference on Vehicular Control, 2020: 86-91. |
| 16 | 刘创, 梁军. 基于注意力机制的车辆运动轨迹预测[J]. 浙江大学学报(工学版), 2020, 54(6): 1156-1163. |
| LIU C, LIANG J. Vehicle motion trajectory prediction based on attention mechanism[J]. Journal of Zhejiang University (Engineering Science), 2020, 54(6): 1156-1163. | |
| 17 | 包智鹏, 支永帅, 张素民, 等. 基于BiGRU的多模态驾驶行为及轨迹预测[J]. 大连理工大学学报, 2021, 61(3): 246-254. |
| BAO Z P, ZHI Y S, ZHANG S M, et al. BiGRU based multi-modal maneuvers and trajectory prediction[J]. Journal of Dalian University of Technology, 2021, 61(3): 246-254. | |
| 18 | KIM H, KIM D, KIM G, et al. Multi-head attention based probabilistic vehicle trajectory prediction[C]. IEEE Intelligent Vehicles Symposium, 2020: 1720-1725. |
| 19 | MESSAOUD K, YAHIAOUI I, VERROUST-BLONDET A, et al. Attention based vehicle trajectory prediction[J]. IEEE Transactions on Intelligent Vehicles, 2020, 6: 175-185. |
| 20 | SHENG Z, XU Y, XUE S, et al. Graph-based spatial-temporal convolutional network for vehicle trajectory prediction in autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23: 17654-17665. |
| 21 | 田彦涛, 黄兴, 卢辉遒, 等. 基于注意力与深度交互的周车多模态行为轨迹预测[J]. 吉林大学学报(工学版), 2023, 53(5): 1474-1480. |
| TIAN Y T, HUANG X, LU H Q, et al. Multi-mode behavior trajectory prediction of surrounding vehicle based on attention and depth interaction[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(5): 1474-1480. | |
| 22 | MO X, XING Y, LV C. Graph and recurrent neural network-based vehicle trajectory prediction for highway driving[C]. IEEE International Intelligent Transportation Systems Conference, 2021: 1934-1939. |
| 23 | LI X, YING X, CHUAH M C. GRIP++: enhanced graph-based interaction-aware trajectory prediction for autonomous driving[J]. arXiv preprint arXiv: , 2020. |
| 24 | CHO K, MERRIENBOER B V, GÜLÇEHRE Ç, et al. Learning phrase representations using RNN encoder–decoder for statistical machine translation[C]. Conference on Empirical Methods in Natural Language Processing, 2014. |
| 25 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[J]. Advances in Neural Information Processing Systems, 2017, 30. |
| 26 | VELICKOVIC P, CUCURULL G, CASANOVA A, et al. Graph attention networks[J]. arXiv preprint arXiv: , 2018. |
| 27 | SALZMANN T, BORIS I, CHAKRAVARTY P, et al. Trajectron++: multi-agent generative trajectory forecasting with heterogeneous data for control[J]. arXiv preprint arXiv: , 2021. |
| 28 | KIM B, PARK S, LEE S S, et al. LaPred: lane-aware prediction of multi-modal future trajectories of dynamic agents[C]. IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 14631-14640. |
| 29 | DEO N, TRIVEDI M M. Trajectory forecasts in unknown environments conditioned on grid-based plans[J]. arXiv preprint arXiv: , 2021. |
| 30 | GILLES T, SABATINI S, TSISHKOU D V, et al. GOHOME: graph-oriented heatmap output for future motion estimation[C]. International Conference on Robotics and Automation, 2021: 9107-9114. |
| 31 | GIRGIS R, GOLEMO F, CODEVILLA F, et al. Latent variable sequential set transformers for joint multi-agent motion prediction[C]. International Conference on Learning Representations, 2021. |
| 32 | GILLES T, SABATINI S, TSISHKOU D V, et al. THOMAS: trajectory heatmap output with learned multi-agent sampling[J]. arXiv preprint arXiv: , 2022. |
| 33 | LIU M, CHENG H, CHEN L, et al. LAformer: trajectory prediction for autonomous driving with lane-aware scene constraints[J]. arXiv preprint arXiv: , 2023. |
| [1] | Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction [J]. Automotive Engineering, 2024, 46(2): 230-240. |
| [2] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [3] | Weiguo Liu,Zhiyu Xiang,Weiping Liu,Daoxin Qi,Zixu Wang. Research on Vehicle Control Algorithm Based on Distributed Reinforcement Learning [J]. Automotive Engineering, 2023, 45(9): 1637-1645. |
| [4] | Yongtao Li,Chenxu Sun,Weiguang Zheng,Enyong Xu,Yufang Li,Shanchao Wang. Collision Warning Based on Fusion of Millimeter Wave Radar and Vision [J]. Automotive Engineering, 2023, 45(9): 1666-1676. |
| [5] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [6] | Dongyu Zhao, Shuen Zhao. Autonomous Driving 3D Object Detection Based on Cascade YOLOv7 [J]. Automotive Engineering, 2023, 45(7): 1112-1122. |
| [7] | Jiahao Zhao,Zhiquan Qi,Zhifeng Qi,Hao Wang,Lei He. Calculation of Heading Angle of Parallel Large Vehicle Based on Tire Feature Points [J]. Automotive Engineering, 2023, 45(6): 1031-1039. |
| [8] | Xia Zhao,Zhao Li,Rui Fu,Zhenzhen Ge,Chang Wang. Real-Time Detection of Distracted Driving Behavior Based on Deep Convolution-Tokens Dimensionality Reduction Optimized Visual Transformer Model [J]. Automotive Engineering, 2023, 45(6): 974-988. |
| [9] | Lisheng Jin,Guangde Han,Xianyi Xie,Baicang Guo,Guofeng Liu,Wentao Zhu. Review of Autonomous Driving Decision-Making Research Based on Reinforcement Learning [J]. Automotive Engineering, 2023, 45(4): 527-540. |
| [10] | Qingyang Huang,Xiaoping Jin,Yikang Zhang. Analysis of Drivers' Driving Posture Change Rule Under the Condition of Automatic Driving Level Improvement [J]. Automotive Engineering, 2023, 45(3): 382-392. |
| [11] | Linhui Li,Xinliang Zhang,Yifan Fu,Jing Lian,Jiaxu Ma. Research on Visible Light and Infrared Post-Fusion Detection Based on TC-YOLOv7 Algorithm [J]. Automotive Engineering, 2023, 45(12): 2280-2290. |
| [12] | Zhengfa Liu,Ya Wu,Peigen Liu,Rongqi Gu,Guang Chen. Cross-Domain Object Detection for Intelligent Driving Based on Joint Distribution Matching of Features and Labels [J]. Automotive Engineering, 2023, 45(11): 2082-2091. |
| [13] | Long Chen,Chen Yang,Yingfeng Cai,Hai Wang,Yicheng Li. Pedestrian Crossing Intention Prediction Method Based on Multimodal Feature Fusion [J]. Automotive Engineering, 2023, 45(10): 1779-1790. |
| [14] | Xiaojun Zhang,Jingzhe Xi,Yanlei Shi,Anlu Yuan. Lightweight YOLOv7-R Algorithm for Road-Side View Target Detection [J]. Automotive Engineering, 2023, 45(10): 1833-1844. |
| [15] | Pulei Xu,Yingfeng Cai,Yubo Lian,Xiaoqiang Sun,Hai Wang,Long Chen,Yilin Zhong. AFS/DYC Coordinated Control of Intelligent Vehicles Based on Improved Hierarchical Extensibility Theory [J]. Automotive Engineering, 2023, 45(1): 20-31. |
|
||