Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (10): 1733-1743.doi: 10.19562/j.chinasae.qcgc.2024.10.002
Previous Articles Next Articles
Zhihao Yu,Rongkang Luo,Peibao Wu,Zhichao Hou( )
)
Received:2024-05-20
Revised:2024-08-10
Online:2024-10-25
Published:2024-10-21
Contact:
Zhichao Hou
E-mail:houzc@tsinghua.edu.cn
Zhihao Yu,Rongkang Luo,Peibao Wu,Zhichao Hou. Chassis Coordinated Control for Lateral Stability of Four-in-Wheel-Motor-Drive Vehicles[J].Automotive Engineering, 2024, 46(10): 1733-1743.
"
"
"

"

"
"
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m | 1 412 kg | ms | 1 270 kg |
| Iz | 1 537 kg·m2 | Ix | 537 kg·m2 |
| lf | 1.02 m | lr | 1.89 m |
| df | 1.68 m | dr | 1.68 m |
| h | 0.54 m | hs | 0.5 m |
| Cαf | 50 000 N/rad | Cαr | 40 000 N/rad |
| K? | 150 000 N·m/rad | C? | 20 000 N·m·s/rad |
| ηf | 20° | ηr | 20° |
"
"
| 参数 | 数值 |
|---|---|
| Ts | 0.01 s |
| Np | 16 |
| Nc | 3 |
| Q4×4 | diag{5 000, 10 000, 5 000, 1 000} |
| R3×3 | diag{0.6, 0.03, 0.15} |
| Ld | diag{100, 100, 100, 100} |
| Tmax | 300 N·m |

"
"
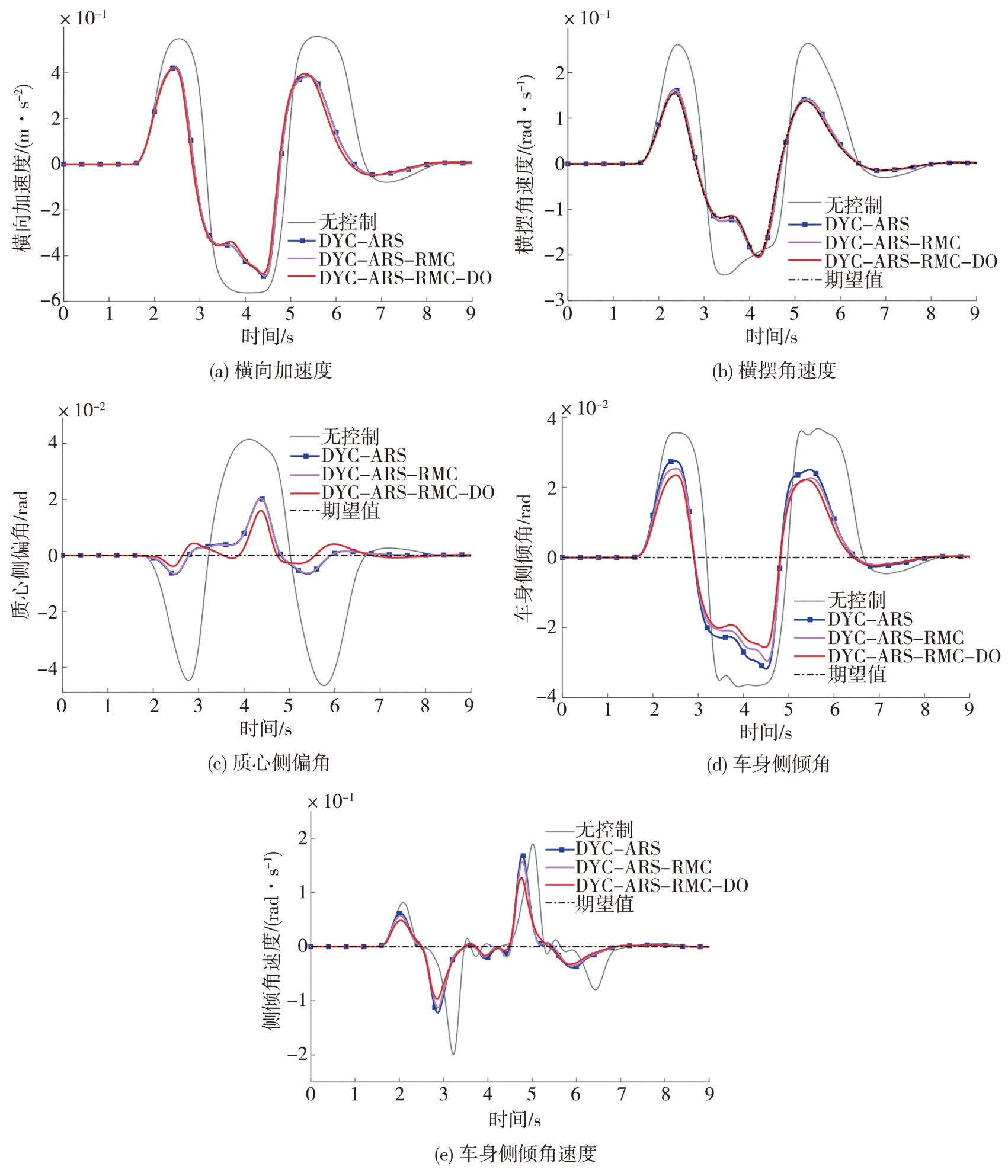
| 控制策略 | 横摆角速度 | 质心侧偏角 | 侧倾角 | 侧倾角速度 |
|---|---|---|---|---|
| 无控制 | 0.080 1 | 0.025 9 | 0.025 1 | 0.058 3 |
| DYC-ARS | 0.006 7 | 0.005 6 | 0.017 3 | 0.043 5 |
| DYC-ARS-RMC | 0.006 5 | 0.005 5 | 0.015 8 | 0.040 1 |
| DYC-ARS-RMC-DO | 0.002 8 (-96.5%/-56.9%) | 0.004 0 (-84.6%/27.3%) | 0.014 4 (-42.6%/-8.9%) | 0.035 1 (-39.8%/-12.5%) |
"

"
| 1 | 张雷, 赵宪华, 王震坡. 四轮轮毂电机独立驱动电动汽车轨迹跟踪与横摆稳定性协调控制研究[J]. 汽车工程, 2020, 42(11): 1513-1521. |
| ZHANG L, ZHAO X H, WANG Z P. Study on coordinated control of trajectory tracking and yaw stability for autonomouts four-wheel-independent-driving electric vehicles[J]. Automotive Engineering, 2020, 42(11): 1513-1521. | |
| 2 | WANG P, ZHANG X, SHI J, et al. Rollover prevention control of electric vehicles based on multi-objective optimization coordination under extreme conditions[J]. IEEE Transactions on Vehicular Technology, 2023, 72(10): 12784-12798. |
| 3 | WANG Q, ZHAO Y, DENG Y, et al. Optimal coordinated control of ARS and DYC for four-wheel steer and in-wheel motor driven electric vehicle with unknown tire model[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10):10809-10819. |
| 4 | LIANG Y, LI Y, YU Y, et al. Integrated lateral control for 4WID/4WIS vehicle in high-speed condition considering the magnitude of steering[J]. Vehicle System Dynamics, 2020, 58(11):1711-1735. |
| 5 | LIU H, LIU C, HAN L, et al. Handling and stability integrated control of AFS and DYC for distributed drive electric vehicles based on risk assessment and prediction[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 23148-23163. |
| 6 | DALBONI M, TAVERNINI D, MONTANARO U,et al. Nonlinear model predictive control for integrated energy-efficient torque-vectoring and anti-roll moment distribution[J]. IEEE/ASME Transactions on Mechatronics, 2021, 26(3):1212-1224. |
| 7 | RICCO M, ZANCHETTA M, RIZZO G C, et al. On the design of yaw rate control via variable front-to-total anti-roll moment distribution[J]. IEEE Transactions on Vehicular Technology, 2019, 69(2): 1388-1403. |
| 8 | KATSUYAMA E, YAMAKADO M, ABE M. A state-of-the-art review: toward a novel vehicle dynamics control concept taking the driveline of electric vehicles into account as promising control actuators[J]. Vehicle System Dynamics, 2021, 59(7): 976-1025. |
| 9 | YU Z, LUO R, MA H, et al. Yaw rate and roll motion control of 4IWMD/4WS vehicle based on active rear steering and torque coordination[C]. IEEE Intelligent Vehicle Symposium, 2024: 1470-1475. |
| 10 | XIAO F, HU J, JIA M, et al. A novel integrated control framework of AFS, ASS, and DYC based on ideal roll angle to improve vehicle stability[J]. Advanced Engineering Informatics, 2022, 54: 101764. |
| 11 | MURATA S. Innovation by in-wheel-motor drive unit[J]. Vehicle System Dynamics, 2012, 50(6): 807-830. |
| 12 | KATSUYAMA E. Decoupled 3D moment control using in-wheel motors[J]. Vehicle System Dynamics, 2013, 51(1): 18-31. |
| 13 | 张利鹏, 李亮, 祁炳楠. 轮毂电机驱动电动汽车侧倾稳定性解耦控制[J]. 机械工程学报, 2017, 53(16): 94-104. |
| ZHANG L P, LI L, QI B N. Decoupled roll stability control of in-wheel motor drive electric vehicle[J]. Jounal of Mechanical Engineering, 2017, 53(16): 94-104. | |
| 14 | 张利鹏, 任晨辉, 李韶华. 轮毂电机驱动汽车侧向稳定性底盘协同控制[J]. 机械工程学报, 2019, 55(22): 153-164. |
| ZHANG L P, REN C H, LI S H. Chassis cooperative control for improving lateral stability of in-wheel motors drive electric vehicle[J]. Jounal of Mechanical Engineering, 2019, 55(22): 153-164. | |
| 15 | 邓斌, 李维汉, 吴迪, 等. 基于KFESO的四轮主动转向积分滑模控制[J]. 汽车工程, 2024, 46(1): 100-108. |
| DENG B, LI W H, WU D, et al. Integral sliding mode control for four-wheel active steering based on Kalman filter extended state observer[J]. Automotive Engineering, 2024, 46(1): 100-108. | |
| 16 | 石求军, 李静, 刘鹏. 基于非线性扰动观测的商用车ESC自适应滑模控制研究[J]. 汽车工程, 2020, 42(6): 801-807. |
| SHI Q J, LI J, LIU P. Research on ESC adaptive sliding mode control for commercial vehicles based on nonlinear disturbance observation[J]. Automotive Engineering, 2020, 42(6): 801-807. | |
| 17 | 李杰, 孔祥悦, 王晓燕, 等. 基于模型预测的主动转向智能无人车辆横向稳态控制[J]. 北京理工大学学报, 2023, 43(8): 812-819. |
| LI J, KONG X Y, WANG X Y, et al. A lateral stability control strategy of active steering intelligent unmanned vehicle based on model predictive[J]. Journal of Beijing Institute of Technology, 2023, 43(8): 812-819. | |
| 18 | 韩陌, 何洪文, 石曼, 等. 基于学习的无人驾驶车辆模型预测路径跟踪控制研究[J]. 汽车工程, 2024, 46(7): 1197-1207. |
| HAN M, HE H W, SHI M, et al. Research on learning-based model predictive path tracking control for autonomous vehicles[J]. Automotive Engineering, 2024, 46(7): 1197-1207. |
| [1] | Lijun Qian,Jian Chen,Feng Zhao,Xinyu Chen,Liang Xuan. Research on Fast Stochastic Model Predictive Control-Based Eco-Driving Strategy for Connected Mixed Platoons [J]. Automotive Engineering, 2024, 46(9): 1587-1599. |
| [2] | Mo Han,Hongwen He,Man Shi,Wei Liu,Jianfei Cao,Jingda Wu. Research on Learning-Based Model Predictive Path Tracking Control for Autonomous Vehicles [J]. Automotive Engineering, 2024, 46(7): 1197-1207. |
| [3] | Guizhen Feng,Dongpeng Zhao,Shaohua Li. Research on Air Spring Modeling Based on Fractional Order and Electric Vehicle Active Suspension Control [J]. Automotive Engineering, 2024, 46(7): 1282-1293. |
| [4] | Shuen Zhao,Sheng Wang,Yao Leng. Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking [J]. Automotive Engineering, 2024, 46(5): 784-794. |
| [5] | Yichao He,Shengjie Kou,He Tian,Hao Li,Yong Lu. Research on Decision-Making and Planning Method for Intelligent Highway Lane-Changing System for Mass Production [J]. Automotive Engineering, 2024, 46(3): 418-430. |
| [6] | Xiaokai Chen,Feng Chen,Xiang Liu,Hongyu Liu,Xiaoyu Wang. Research on DOB-Based Switching Control Algorithm for Active Suspension System [J]. Automotive Engineering, 2024, 46(10): 1744-1754. |
| [7] | Tong Wu,Jing Rong,Junnian Wang,Wen Sun,Liang Chu,Linhe Ge. Dynamic Braking Allocation Strategy for Turning-Braking Maneuver [J]. Automotive Engineering, 2024, 46(10): 1755-1765. |
| [8] | Shaobo Lu,Lingfeng Dai,Chenhui Wang,Bingjun Liu,Zhigang Chu,Wenke Xie. Trajectory Planning and Control of Autonomous Vehicle Under Extreme Conditions Based on Autonomous Drift [J]. Automotive Engineering, 2024, 46(10): 1780-1789. |
| [9] | Hongmao Qin,Shu Jiang,Tiantian Zhang,Heping Xie,Yougang Bian,Yang Li. Path Tracking Control of Intelligent Vehicle Based on Learning Model Predictive Control [J]. Automotive Engineering, 2024, 46(10): 1804-1815. |
| [10] | Zhong Zhang,Xiaojian Wu,Huihua Jiang,Chao Zhang,Yukang Wan. Model Predictive Anti-disturbance Control for Longitudinal Motion of Intelligent Vehicles Under Multi-source Disturbances [J]. Automotive Engineering, 2024, 46(10): 1816-1828. |
| [11] | Zhiqun Yuan,Yanqiang Chen,Yuxuan Chang,Diansheng Huo,Li Lin. Model Predictive Control with Adaptive Horizon for Vehicle Trajectory Tracking Considering Crosswind Stability [J]. Automotive Engineering, 2024, 46(10): 1829-1841. |
| [12] | Bin Deng, Weihan Li, Di Wu, Bingzhan Zhang, Han Zhao. Integral Sliding Mode Control for Four-Wheel Active Steering Based on Kalman Filter Extended State Observer [J]. Automotive Engineering, 2024, 46(1): 100-108. |
| [13] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [14] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [15] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |