Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (3): 418-429.doi: 10.19562/j.chinasae.qcgc.2025.03.004
Ruixin Yang1,Yingfeng Cai1( ),Yubo Lian2,Long Chen1,Xiaoqiang Sun1
),Yubo Lian2,Long Chen1,Xiaoqiang Sun1
Received:2024-07-18
Revised:2024-08-30
Online:2025-03-25
Published:2025-03-21
Contact:
Yingfeng Cai
E-mail:caicaixiao0304@126.com
Ruixin Yang,Yingfeng Cai,Yubo Lian,Long Chen,Xiaoqiang Sun. Distributed MPC Multi-objective Optimization Control for Commercial Vehicle Platoon Under Time Delay Conditions[J].Automotive Engineering, 2025, 47(3): 418-429.
"


"

"
"

"
车辆 序号 | 质量/kg | 车身长度/mm | 车轮滚动 半径/m | 车辆迎风 面积/m2 |
|---|---|---|---|---|
| 1 | 4 000 | 5 500 | 0.35 | 2.5 |
| 2 | 4 500 | 6 000 | 0.40 | 3.0 |
| 3 | 5 000 | 6 500 | 0.45 | 3.5 |
| 4 | 5 500 | 7 000 | 0.50 | 4.0 |
| 5 | 6 000 | 7 500 | 0.55 | 4.5 |
"
"

"

"
"
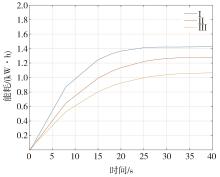
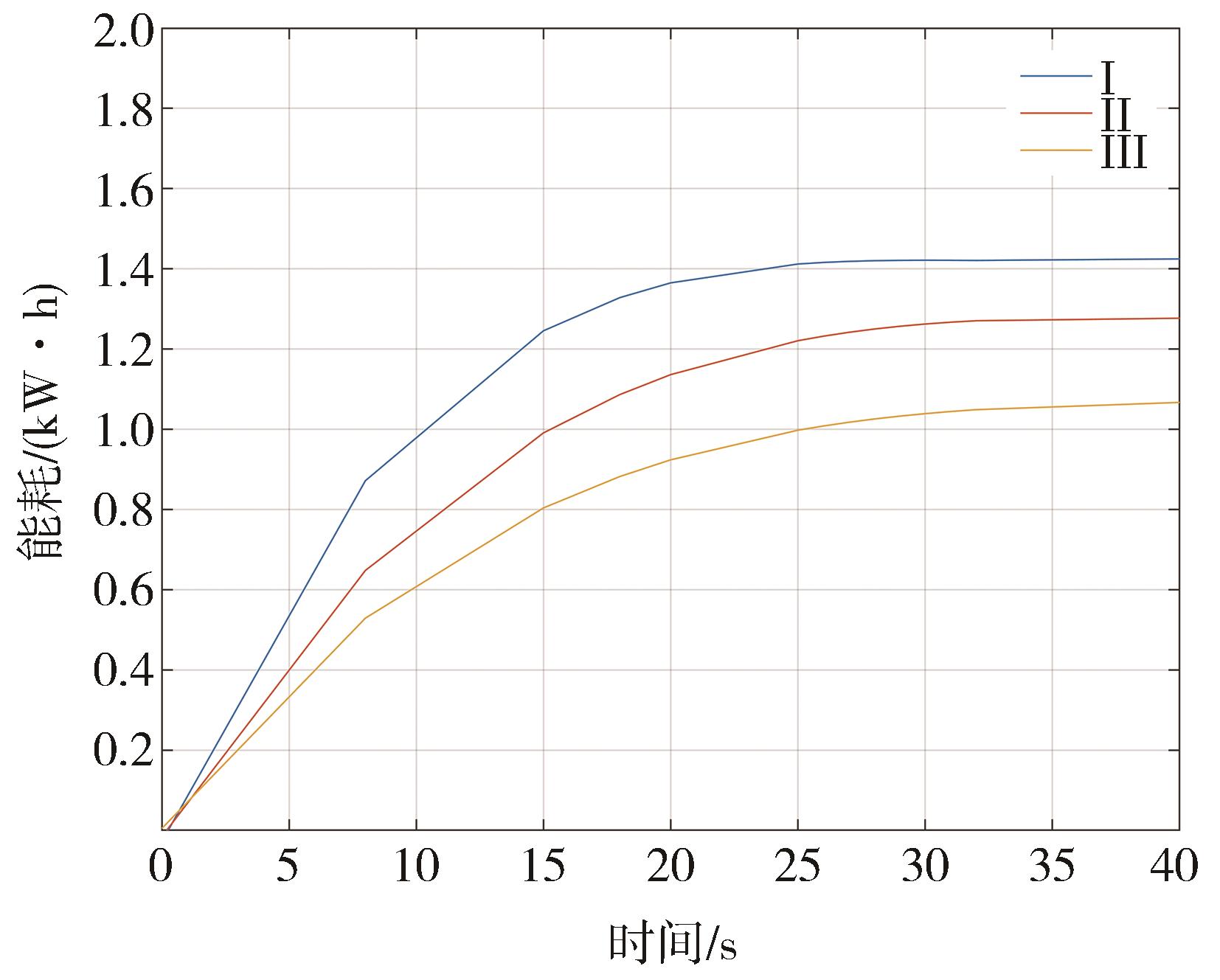
| 参数 | MPC控制器 | 不集成延迟补偿的DMPC控制器 | 集成延迟补偿的DMPC控制器 | |
|---|---|---|---|---|
| 跟随性、延迟补偿效果 | 平均距离误差/m | 0.372 5 | 0.153 9 | 0.088 3 |
| 经济性 | 总能耗/(kW·h) | 1.42 | 1.28 | 1.07 |
| 舒适性 | 平均加加速度/(m·s-3) | 0.583 7 | 0.427 2 | 0.402 1 |
| 1 | WANG Z, BIAN Y, SHLADOVER S E, et al. A survey on cooperative longitudinal motion control of multiple connected and automated vehicles[J]. IEEE Intelligent Transportation Systems, 2020, 12(1): 4-24. |
| 2 | 薛杨.基于模糊PID控制的车辆纵向优化CACC系统[D].长春:吉林大学,2015. |
| XUE Yang. Vehicle longitudinal optimization CACC system based on fuzzy PID control [D]. Changchun: Jilin University,2015. | |
| 3 | VICENTE Milanés, STEVEN E. Shladover, JOHN Spring, et al. Cooperative adaptive cruise control in real traffic situations[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1): 296-305. |
| 4 | 刘骝.基于多目标决策算法和PID控制的CACC系统的优化与仿真[D].长春:吉林大学,2016. |
| LIU Liu. Optimization and simulation of CACC system based on multi objective decision algorithm and PID control [D]. Changchun: Jilin University,2016. | |
| 5 | BAYEZIT I,VELDHUIZEN T,FIDAN B,et al. Design of string stable adaptive cruise controllers for highway and urban missions[C]. Communication, Control, & Computing. IEEE, 2013. |
| 6 | PENG H, LI D, ABBOUD K, et al. Performance analysis of DCF for multi-platooning communications with autonomous vehicles[J]. IEEE Transactions on Vehicular Technology, 2017, 66(3): 2485-2498. |
| 7 | JIA D, LU K, WANG J. On the network connectivity of platoon-based vehicular cyber-physical systems[J]. Transp. Res. Part C: Emerging Technol, 2014, 40: 215-230. |
| 8 | LAN J, ZHAO D. Min-max model predictive vehicle platooning with communication delay[J]. IEEE Transactions on Vehicle Technology, 2020, 69(11): 12570-12584. |
| 9 | YAN M, MA W, ZUO L, et al. Distributed model predictive control for platooning of heterogeneous vehicles with multiple constraints and communication delays[J]. Adv. Transp, 2020: 1-16. |
| 10 | ZHANG Y, BAI Y, WANG M, et al. Cooperative adaptive cruise control with robustness against communication delay: An approach in the space domain[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(9): 5496-5507. |
| 11 | 王志文,王沛禄,高红红.自主车队纵向控制器设计及仿真研究[J].陕西科技大学学报, 2014(6): 165-169. |
| WANG Zhiwen, WANG Peilu, GAO Honghong. Design and simulation study of longitudinal controller for autonomous vehicle fleet [J]. Journal of Shaanxi University of Science and Technology, 2014 (6): 165-169. | |
| 12 | 张亮修,吴光强,郭晓晓.车辆自适应巡航控制系统的建模与分层控制[J].汽车工程, 2018, 40(5): 547-553. |
| ZHANG Liangxiu, WU Guangqiang, GUO Xiaoxiao. Modeling and hierarchical control of vehicle adaptive cruise control system [J]. Automotive Engineering, 2018, 40 (5): 547-553. | |
| 13 | SHI Shengling, MIRCEA Lazar. On distributed model predictive control for vehicle platooning with a recursive feasibility guarantee[J]. IFAC Papers On Line, 2017, 50(1): 7193-7198. |
| 14 | VAN NUNEN E, REINDERS J, SEMSAR-KAZEROONI E, et al. String stable model predictive cooperative adaptive cruise control for heterogeneous platoons [J]. IEEE Transactions on Intelligent Vehicles, 2019, 4(2): 186-196. |
| 15 | GUO Ge, LI Ping, HAO Liying. A new quadratic spacing policy and adaptive fault-tolerant platooning with actuator saturation[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 23(2): 1200-1212. |
| 16 | HU Yuying, CHEN Cailian, HE Jianping, et al. Eco-platooning for cooperative automated vehicles under mixed traffic flow [J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(4): 2023-2034. |
| 17 | PIRANI M, BALDI S, JOHANSSON K H. Impact of network topology on the resilience of vehicle platoons [J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 15166-15177. |
| 18 | GAO Feng, HU Xiaosong, LI Shengbo eben, et al. Distributed adaptive sliding mode control of vehicular platoon with uncertain interaction topology [J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 65(8): 6352-6361. |
| 19 | PAN Chengwei, CHEN Yong, LIU Yuezhi, et al. Adaptive resilient control for interconnected vehicular platoon with fault and saturation [J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(80): 10210-10222. |
| 20 | TYLER Ard, BIBIN Pattel, ARDALAN Vahidi, et al. Considerate and cooperative model predictive control for energy-efficient truck platooning of heterogeneous fleets[J]. IEEE Transactions on Vehicular Technology, 2022, 71(6): 5755-5769. |
| 21 | ZHANG Yu, BAI Yu, WANG Meng, et al. Cooperative adaptive cruise control with robustness against communication delay: an approach in the space domain[C]. American Control Conference, 2022. |
| 22 | XU Liwei, ZHUANG Weichao, YIN Guodong, et al. Modeling and robust control of heterogeneous vehicle platoon on curved road subject to disturbances and delays[J]. IEEE Transactions on Vehicular Technology, 2019, 68(99): 11551-11564. |
| 23 | XU Liwei, ZHUANG Weichao, YIN Guodong, et al. Stable longitudinal control of heterogeneous vehicular platoon with disturbances and information delays[J]. IEEE Access, 2018, 6: 69794-69806. |
| 24 | YU Guokuan, WONG Pak Kin, HUANG Wei, et al. Distributed adaptive consensus protocol for connected vehicle platoon with heterogeneous time-varying delays and switching topologies[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 17620-17631. |
| 25 | TIAN Bin, WANG Guanqun, XU Zhigang, et al. Communication delay compensation for string stability of CACC system using LSTM prediction[J]. Vehicular Communications, 2021, 29: 100333. |
| 26 | 王雪彤,罗禹贡,江发潮,等.纯电动商用车异质队列的多目标控制[J].汽车工程, 2020, 42(4): 505-512,559. |
| WANG Xuetong, LUO Yugong, JIANG Fachao, et al. Multi-target control for heterogeneous platoon of battery electric commercial vehicle[J]. Automotive Engineering, 2020, 42 (4): 505-512,559. | |
| 27 | XU Hao, TU Ran, LI Tiezhu, et al. Interpretable bus energy consumption model with minimal input variable considering powertrain types [J]. Transportation Res Part D: Transportation Environment, 2023, 119: 103742. |
| 28 | DUNBAR W B, CAVENEY D S. Distributed receding horizon control of vehicle platoons: stability and string stability [J]. IEEE Transactions on Automatic Control, 2012, 57(3): 620-633. |
| 29 | MA Hao, CHU Liang, GUO Jianhua, et al. Cooperative adaptive cruise control strategy optimization for electric vehicles based on SA-PSO with model predictive control [J]. IEEE Access, 2020: 3043370. |
| [1] | Shuen Zhao,Sheng Wang,Yao Leng. Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking [J]. Automotive Engineering, 2024, 46(5): 784-794. |
| [2] | Yunfei Zha,Liyuan Zheng,Yinyuan Qiu,Yue Chen. Optimization of Vibration Isolation Rate of Pure Electric Vehicle Mounting System Based on NSGA-II [J]. Automotive Engineering, 2024, 46(11): 2091-2099. |
| [3] | Geng Luo,Chengpeng Chai,Zhaofei Zhu,Yisong Chen. Research on the Crashworthiness of 3D Printing Gradient Random Honeycomb Sandwich Structure and Multi-objective Optimization Design [J]. Automotive Engineering, 2024, 46(11): 2110-2121. |
| [4] | Meng Xiong,Dong Zhang,Guojian You,Tianfei Sun,Kai Sheng,Xuezhe Wei. Multi-objective Optimization Design of High Efficiency and High Utilization Magnetic Core of Wireless Charging of Electric Vehicles [J]. Automotive Engineering, 2023, 45(9): 1740-1752. |
| [5] | Yuan Zou,Wenjing Sun,Xudong Zhang,Ya Wen,Wanke Cao,Zhaolong Zhang. Multi-objective Optimization of In-Vehicle Ethernet Network Architecture for Time-Sensitive Network [J]. Automotive Engineering, 2023, 45(5): 746-758. |
| [6] | Zhiyong Duan,Jing Ma. Multi-objective Optimization of Lithium Battery Composite Cooling Structure Based on Heat Pipes and Liquid Cooling Plate [J]. Automotive Engineering, 2023, 45(11): 2047-2057. |
| [7] | Jie Li,Xiaodong Wu,Min Xu,Yonggang Liu. Reinforcement Learning Based Multi-objective Eco-driving Strategy in Urban Scenarios [J]. Automotive Engineering, 2023, 45(10): 1791-1802. |
| [8] | Ruoyu Lu,Jie Hu,Ruinan Chen,Wencai Xu,Kai Cao. Cooperative Adaptive Cruise Control of Intelligent Vehicles Based on DMPC [J]. Automotive Engineering, 2021, 43(8): 1177-1186. |
| [9] | Zhonghua Tang,Yansong He,Tao Ma,Zhifei Zhang,Hongjie Pu,Yun Li,Zhao Chen. Lightweight Design of Automotive Sound Package [J]. Automotive Engineering, 2021, 43(1): 113-120. |
| [10] | Zhang Zhifei, Xue Haoxiang, Chen Zhao, Pu Hongjie, Xu Zhongming, He Yansong. Optimization of Front Suspension and Steering System Based on Grey Correlation TOPSIS Method [J]. Automotive Engineering, 2020, 42(8): 1082-1089. |
| [11] | Wu Jingwei, Zhang Guangya, Lü Juncheng, Li Qian. Methodology Research on Optimization Design of Vehicle Interior Space Under Constraint of Body Performance [J]. Automotive Engineering, 2020, 42(8): 1117-1123. |
| [12] | He Liangguo, Zhao Jie, Gu Xianguang. Lightweight and Crashworthiness Design of Vehicle BodyFront-end Based on Multi-cell Structure [J]. Automotive Engineering, 2020, 42(6): 832-839. |
| [13] | Cui An, Xu Xiaoqian, Sun Wenlong, Yang Weili, Huang Xianqing, Liu Tianci. Study on Crashworthiness Optimization of Carbon-fiberSandwich Panel Structure with Polypropylene Foam Core [J]. Automotive Engineering, 2020, 42(6): 840-846. |
| [14] | Yang Jing, Luo Xianfang, He Liange, Tao Wenzhu, Zhao Chao. Lean Burn Engine Retrofit Design and Timing Strategy Optimization [J]. Automotive Engineering, 2020, 42(4): 439-444. |
| [15] | Wang Dengfeng, Xu Wenchao. Robust Optimization for Hybrid (Bolted/Bonded) Connection ofMagnesium-Aluminum Alloy Assembled Wheel [J]. Automotive Engineering, 2020, 42(4): 545-551. |
|
||