Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (10): 1973-1984.doi: 10.19562/j.chinasae.qcgc.2025.10.013
Bing Zhu1,Haiqiao Li1,Jian Zhao1,Zhicheng Chen1( ),Jie Hou2,Shiwei Wang2,Shuwei Ding2
),Jie Hou2,Shiwei Wang2,Shuwei Ding2
Received:2024-11-29
Revised:2025-01-12
Online:2025-10-25
Published:2025-10-20
Contact:
Zhicheng Chen
E-mail:chenzhicheng@jlu.edu.cn
Bing Zhu,Haiqiao Li,Jian Zhao,Zhicheng Chen,Jie Hou,Shiwei Wang,Shuwei Ding. Robust Model Predictive Anti-Disturbance Control for Active Suspension System Based on Output Feedback Observer[J].Automotive Engineering, 2025, 47(10): 1973-1984.

"

"
| 符号 | 定义 | 单位 |
|---|---|---|
| 车身垂向位移 | ||
| 簧载质量部分质心距前/后轴距离 | ||
| 车身俯仰角 | ||
| 车身俯仰转动惯量 | ||
| 簧载质量 | ||
| 前/后车身垂向位移 | ||
| 前/后簧下质量垂向位移 | ||
| 前/后轮路面激励 | ||
| 前/后悬架刚度系数 | ||
| 前/后悬架阻尼系数 | ||
| 前/后非簧载质量 | ||
| 前/后轮胎刚度系数 | ||
| 前/后轮胎阻尼系数 | ||
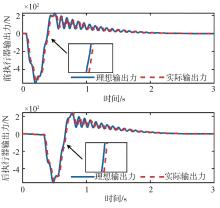
| 前/后主动悬架执行器实际输出力 | ||
| 前/后主动悬架执行器理想输出力 | ||
| 前/后主动悬架执行器时滞参数 |
"
"
| 符号 | 数值 | 单位 |
|---|---|---|
| 700 | ||
| 45 | ||
| 45 | ||
| 1.4 | ||
| 1.4 | ||
| 1 250 | ||
| 18 000 | ||
| 18 000 | ||
| 1 500 | ||
| 1 500 | ||
| 220 000 | ||
| 220 000 | ||
| 10 | ||
| 10 | ||
| 0.1 | ||
| 2 500 |
"
"

"

"
"
"
| 参数 | ||||||
|---|---|---|---|---|---|---|
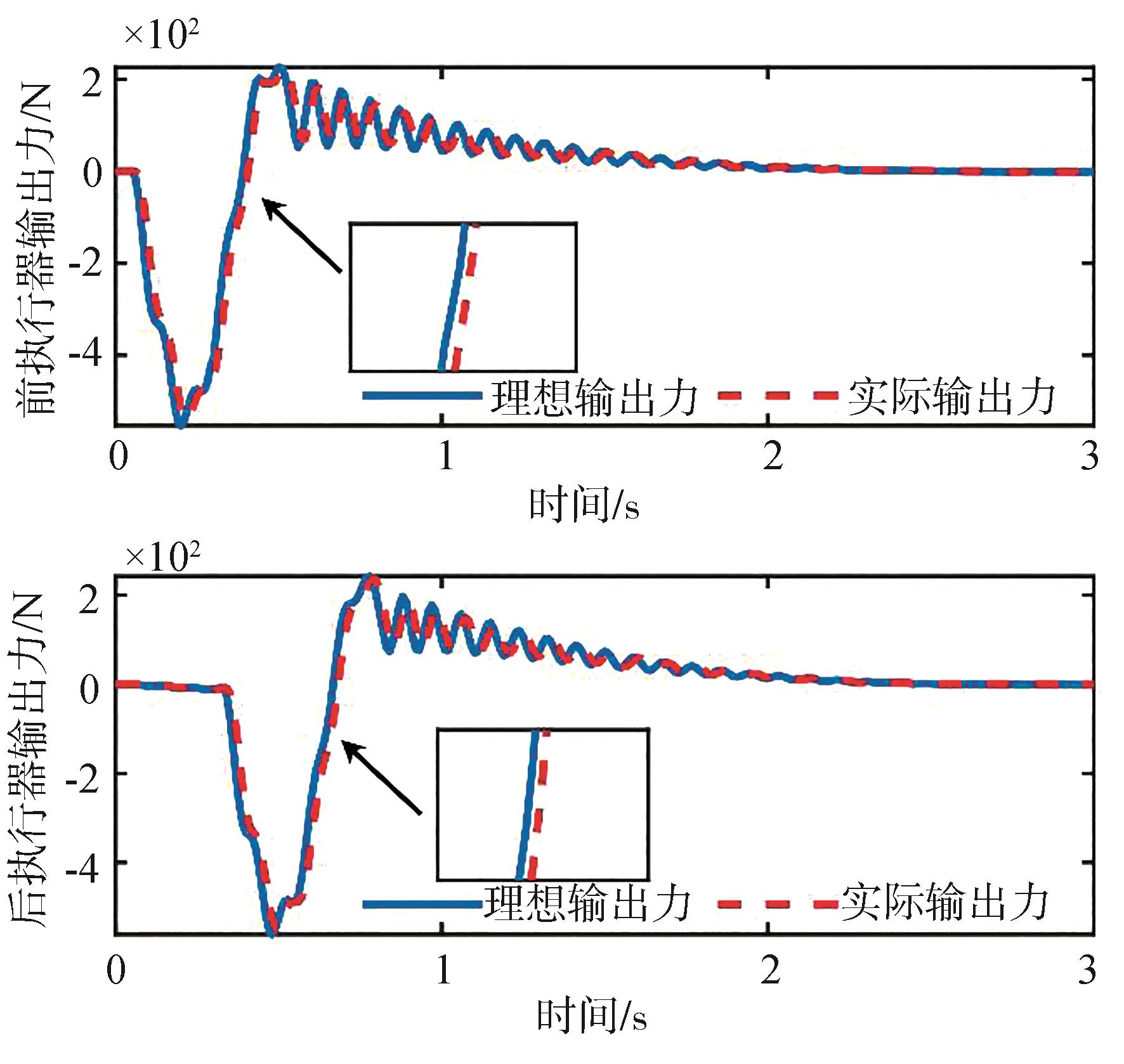
| Passive | 0.247 7 | 0.352 9 | 0.007 5 | 0.008 2 | 0.000 8 | 0.000 86 |
| 0.107 8 | 0.200 9 | 0.005 0 | 0.005 5 | 0.000 5 | 0.000 5 | |
| MPC | 0.073 2 | 0.087 2 | 0.008 4 | 0.009 2 | 0.000 19 | 0.000 19 |
| OB-RMPAC | 0.036 7 | 0.049 7 | 0.007 0 | 0.007 1 | 0.000 16 | 0.000 19 |
"
| 参数 | ||||||
|---|---|---|---|---|---|---|
| Passive | 0.614 5 | 1.107 5 | 0.026 3 | 0.027 5 | 0.002 9 | 0.003 0 |
| 0.337 9 | 0.696 6 | 0.019 7 | 0.020 8 | 0.001 9 | 0.001 9 | |
| MPC | 0.264 3 | 0.314 3 | 0.032 3 | 0.034 0 | 0.000 9 | 0.000 8 |
| OB-RMPAC | 0.138 9 | 0.197 1 | 0.026 0 | 0.026 0 | 0.000 6 | 0.000 7 |
"
| 参数 | ||||||
|---|---|---|---|---|---|---|
| Passive | 0.247 7 | 0.352 9 | 0.007 5 | 0.008 2 | 0.000 8 | 0.000 86 |
| 0.131 8 | 0.238 1 | 0.004 8 | 0.005 2 | 0.000 6 | 0.000 60 | |
| MPC | 0.193 2 | 0.218 4 | 0.015 5 | 0.017 6 | 0.000 55 | 0.000 58 |
| OB-RMPAC | 0.044 3 | 0.062 9 | 0.006 8 | 0.006 9 | 0.000 18 | 0.000 20 |
"
| 参数 | ||||||
|---|---|---|---|---|---|---|
| Passive | 0.614 5 | 1.107 5 | 0.026 3 | 0.027 5 | 0.002 90 | 0.003 00 |
| 0.438 7 | 0.787 8 | 0.018 6 | 0.019 7 | 0.002 20 | 0.002 20 | |
| MPC | 0.636 4 | 0.819 6 | 0.034 4 | 0.039 6 | 0.002 30 | 0.002 30 |
| OB-RMPAC | 0.163 7 | 0.245 9 | 0.025 1 | 0.025 3 | 0.000 66 | 0.000 76 |
| [1] | WANG X, LI H Q, LI P, et al. Resilient-based and attack-intensity event-triggered protocol for active quarter-vehicle suspension systems under DoS attacks [J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(7): 1-11. |
| [2] | SHEN Y J, QIU D D, YANG X F, et al. Vibration isolation performance analysis of a nonlinear fluid inerter-based hydro-pneumatic suspension [J]. International Journal of Structural Stability and Dynamics, 2024. |
| [3] | YANG X F, ZHANG T Y, SHEN Y J, et al. Tradeoff analysis of the energy-harvesting vehicle suspension system employing inerter element [J]. Energy, 2024, 308: 132841. |
| [4] | QIN W, LIU F F, YIN H, et al. Constraint-based adaptive robust control for active suspension systems under the sky-hook model [J]. IEEE Transactions on Industrial Electronics, 2022, 69(5): 5152-5164. |
| [5] | DAEKYUN L, SUNWOO J, CHIBUM L. Deep reinforcement learning of semi-active suspension controller for vehicle ride comfort [J]. IEEE Transactions on Vehicular Technology, 2023, 72(1): 327-339. |
| [6] | 吴骁, 史文库, 陈志勇. 基于交互式多模型卡尔曼滤波的主动悬架控制[J]. 汽车工程, 2023, 45(7): 1200-1211,1253. |
| WU X, SHI W K, CHEN Z Y. Active suspension control based on interacting multiple model Kalman filter[J]. Automotive Engineering, 2023, 45(7): 1200-1211,1253. | |
| [7] | BAI R, WANG H B. Optimal control for the vehicle suspension system with uncertainties [J]. IEEE Transactions on Cybernetics, 2022, 52(9): 9263-9273. |
| [8] | GOHRLE C, SCHINDLER A, WAGNER A, et al. Design and vehicle implementation of preview active suspension controllers [J]. IEEE Transactions on Control Systems Technology, 2014, 22(3): 1135-1142. |
| [9] | LI W F, XIE Z C, ZHAO J, et al. Fuzzy finite-frequency output feedback control for nonlinear active suspension systems with time delay and output constraints [J]. Mechanical Systems and Signal Processing, 2019, 132:315-334. |
| [10] | YANG T P, LI P Q, LI Q P, et al. Active suspension control strategy for vehicles based on road surface recognition [J]. Nonlinear Dynamics, 2024, 112 (13): 11043-11065. |
| [11] | 纪仁杰, 方明霞, 李佩琳, 等. 含时滞悬架系统 H ∞ 控制的理论与实验研究[J]. 汽车工程, 2020, 42(3): 339-344,352. |
| JI R J, FANG M X, LI P L, et al. Theoretical and experimental research on H ∞ control suspension system with time delay [J]. Automotive Engineering, 2020, 42(3): 339-344,352. | |
| [12] | LI H Y, LIU H H, GAO H J, et al. Reliable fuzzy control for active suspension systems with actuator delay and fault [J]. IEEE Transactions on Fuzzy Systems, 2012, 20(2): 342-357. |
| [13] | SOFIANE B, MOHAMMED C, ZHANG L X, et al. Constrained model predictive control for time-varying delay systems: application to an active car suspension[J]. International Journal of Control, Automation and Systems, 2016, 14(1): 51-58. |
| [14] | JOHAN T, ALDO S, PATRICK G, et al. Regionless explicit model predictive control of active suspension systems with preview [J]. IEEE Transactions on Industrial Electronics, 2020, 67(6): 4877-4888. |
| [15] | WONG P K, LI W F, MA X B, et al. Adaptive event-triggered dynamic output feedback control for nonlinear active suspension systems based on interval type-2 fuzzy method [J]. Mechanical Systems and Signal Processing, 2024, 212: 111280. |
| [16] | LI H Y, JING X J, KARIMI H R. Output-feedback-based H ∞ control for vehicle suspension systems with control delay [J]. IEEE Transactions on Industrial Electronics, 2014, 61(1): 436-446. |
| [17] | LI W F, XIE Z C, ZHAO J, et al. Static output feedback based robust fuzzy wheelbase preview control for uncertain active suspensions with time delay and finite frequency constraint [J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(3): 664-678. |
| [18] | DU M M, ZHOA D X, YANG M K, et al. Nonlinear extended state observer-based output feedback stabilization control for uncertain nonlinear half-car active suspension systems [J]. Nonlinear Dynamics, 2020, 100(3): 2483-2503. |
| [19] | ALESSANDRI A, BAGLIETTO M, BATTISTELLI G. Design of state estimators for uncertain linear systems using quadratic boundedness [J]. Automatica, 2005, 42(3): 497-502. |
| [20] | BLANCHINI F. Set invariance in control [J]. Automatica, 1999, 35 (11): 1747-1767. |
| [21] | PING X B, HU J C, LIN T Y, et al. A survey of output feedback robust MPC for linear parameter varying systems [J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(10): 1717-1751. |
| [22] | WU J, ZHOU H L, LIU Z Y, et al. Ride comfort optimization via speed planning and preview semi-active suspension control for autonomous vehicles on uneven roads [J]. IEEE Transactions on Vehicular Technology, 2020, 69(8): 8343-8355. |
| [23] | YANG H Y, QIN Y C, XIANG C L, et al. Active suspension robust preview control by considering actuator delay [J]. IEEE Transactions on Intelligent Vehicles, 2023, 8(9): 1-12. |
| [1] | Xiaokai Chen,Cheng Shen,Zhuoyi Wang,Xiang Liu. Research on Fixed-Time Control of Active Suspension System Considering Mismatched Disturbance [J]. Automotive Engineering, 2025, 47(7): 1394-1403. |
| [2] | Jian Zhao,Cong He,Feng Liu,Bing Zhu,Jing Chen,Zhicheng Chen. Adaptive Anti-jamming Angle Control Strategy for Steer-by-Wire System [J]. Automotive Engineering, 2025, 47(5): 888-896. |
| [3] | Juncheng Wang,Mingyao Zhou,Shiwei Zhang. Interval Type2-Smith Fuzzy Based Time Delay Compensation Control for Magnetorheological Semi-active Suspension [J]. Automotive Engineering, 2025, 47(4): 755-764. |
| [4] | Minghui Cui,Zhijun Fu,Rakheja Subhash,Ran Zhen,Yegang Liu. Adaptive Preview H∞ Control of Active Suspension Based on Road Recognition [J]. Automotive Engineering, 2025, 47(3): 508-518. |
| [5] | Xiaokai Chen,Hongyu Liu,Xiang Liu. H2/H∞ Control of Active Suspension Based on IUDE Algorithm [J]. Automotive Engineering, 2025, 47(1): 137-148. |
| [6] | Bing Zhu,Yanpeng Tang,Dongbo Zhang,Jian Zhao,Zhicheng Chen. Adaptive Pressure Control for Electronic Boost Brake System Considering Multi-dimensional Nonlinear Disturbances [J]. Automotive Engineering, 2024, 46(6): 1096-1103. |
| [7] | Xiaokai Chen,Feng Chen,Xiang Liu,Hongyu Liu,Xiaoyu Wang. Research on DOB-Based Switching Control Algorithm for Active Suspension System [J]. Automotive Engineering, 2024, 46(10): 1744-1754. |
| [8] | Zixian Li,Shiju Pan,Yuan Zhu,Binbing He,Youchun Xu. Semi-active Suspension Control for Intelligent Vehicles Based on State Feedback and Preview Feedforward [J]. Automotive Engineering, 2023, 45(5): 735-745. |
| [9] | Gang Wang,Kunpeng Li,Hui Jing,Suqi Liu. Parameter-Free H∞ Control of Vehicle Active Suspension Based on Q-learning [J]. Automotive Engineering, 2023, 45(12): 2260-2271. |
| [10] | Xiaokai Chen,Mingkai Zeng,Xiang Liu,An Jiang. Research on Semi-active Suspension Preview Control Based on VSL-MPC [J]. Automotive Engineering, 2022, 44(10): 1537-1546. |
| [11] | Zhizhao Peng,Yintao Wei,Xiaowei Fu,Xiejun Yao. Research and Performance Test of Magnetorheological Semi⁃Active Suspension System Based on a Real Vehicle [J]. Automotive Engineering, 2021, 43(2): 269-277. |
| [12] | Renkai Ding,Yu Jiang,Ruochen Wang,Wei Liu,Xiangpeng Meng,Zeyu Sun. Research on Road Elevation and Grade Identification of Active Suspension Considering Unknown Inputs [J]. Automotive Engineering, 2021, 43(2): 278-286. |
| [13] | Shi Qiujun, Li Jing, Liu Peng. Research on ESC Adaptive Sliding Mode Control for CommercialVehicles Based on Nonlinear Disturbance Observation [J]. Automotive Engineering, 2020, 42(6): 801-807. |
| [14] | Ji Renjie, Fang Mingxia, Li Peilin, Yan Gai. Theoretical and Experimental Research on H∞ Control Suspension System with Time Delay [J]. Automotive Engineering, 2020, 42(3): 339-344. |
| [15] | Guo Konghui, Wang Yang. A Study on Modified Acceleration-driven DampingControl Strategy for Semi-active Suspension [J]. Automotive Engineering, 2019, 41(5): 481-486. |
|
||