| [1] |
Qinyu Sun,Hang Zhou,Rui Fu,Chang Wang,Tao Huang,Junfeng Yang,Yunhao Wang.
Prediction of Lane Change Intention Based on Driver's Cognitive-Making Space
[J]. Automotive Engineering, 2025, 47(8): 1468-1478.
|
| [2] |
Jian Wu,Yukang Shi,Bing Zhu,Jian Zhao,Zhicheng Chen.
Intelligent Vehicle Decision for Roundabouts Based on Subjective Prior Reinforcement Learning
[J]. Automotive Engineering, 2025, 47(8): 1513-1521.
|
| [3] |
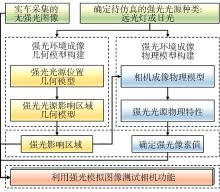
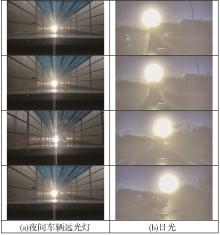
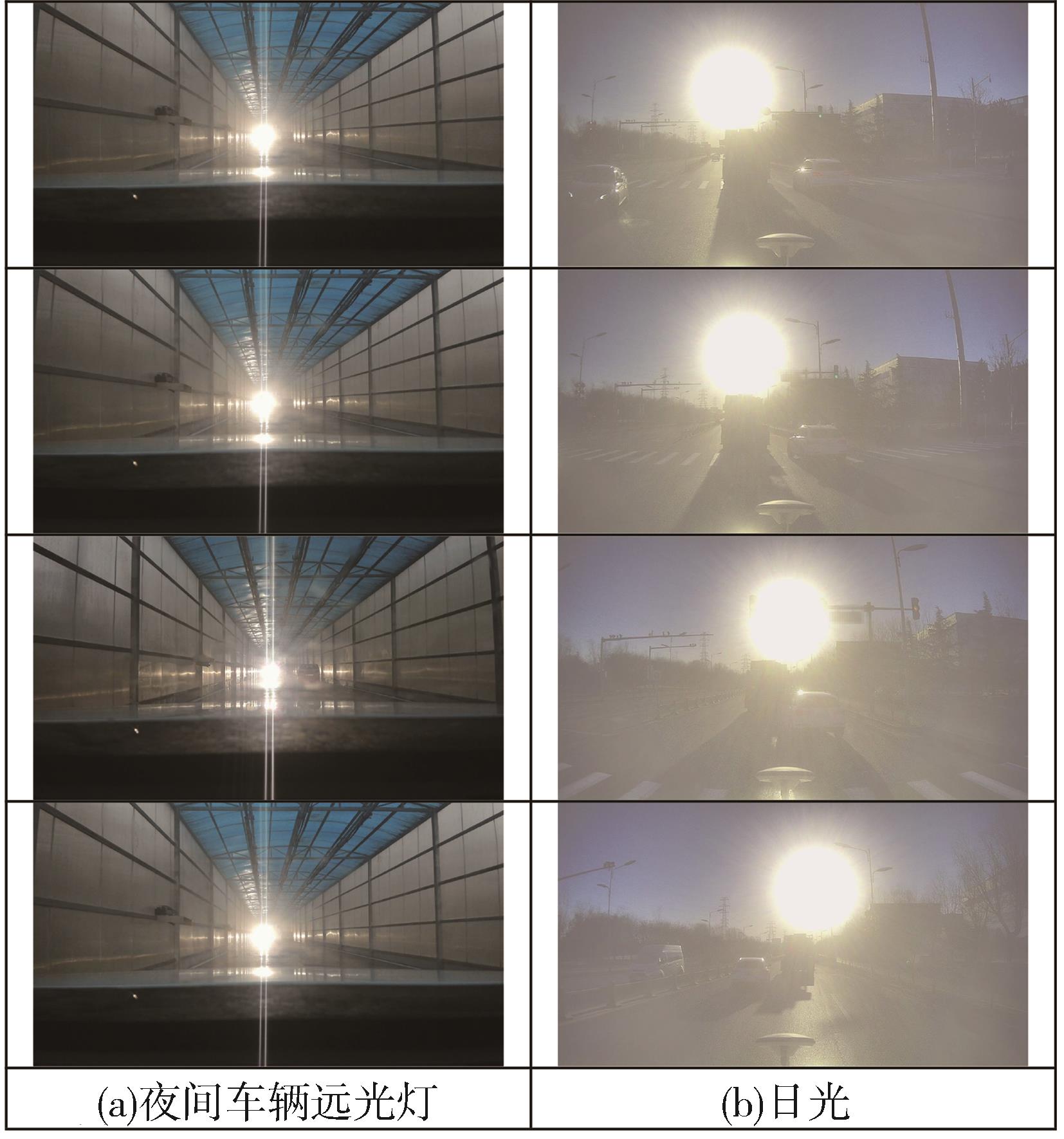
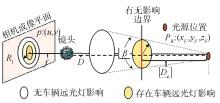
Bing Zhu,Yinzi Huang,Jian Zhao,Peixing Zhang,Zhitong Gao,Jingwei Xue.
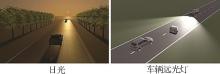
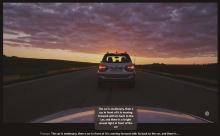
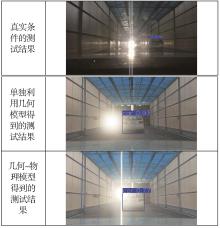
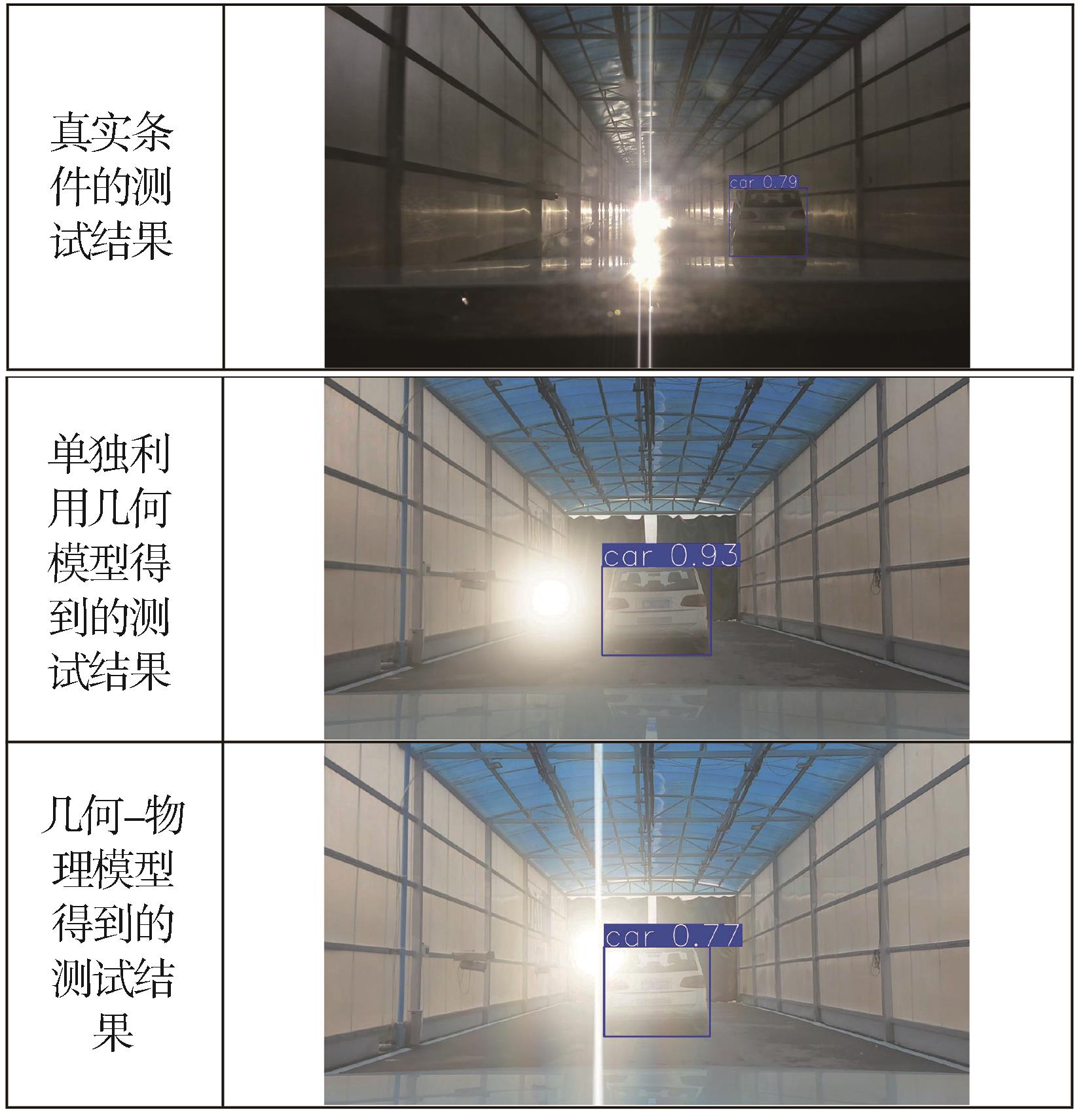
Adverse Weather Condition Digital-Physical Fusion Simulation Based Intelligent Vehicle Camera-in-the-loop Test
[J]. Automotive Engineering, 2025, 47(7): 1335-1343.
|
| [4] |
Xiujian Yang,Xulei Feng,Shengbin Zhang,Yongrui Bai.
Trajectory Planning for Intelligent Vehicles in Unstructured Environment Based on Spatio-Temporal Corridors
[J]. Automotive Engineering, 2025, 47(7): 1357-1368.
|
| [5] |
Xin Jia,Songlin Li,Yuansheng She,Feng Hong.
Research on Environmental Perception Information Unified Fusion Method of Intelligent Vehicle Based on Interactive Multiple Models
[J]. Automotive Engineering, 2025, 47(6): 1144-1154.
|
| [6] |
Lu Xiong,Jiaqi Zhu,Mengyuan Chen,Ziyao Li,Qiang Shu,Guirong Zhuo.
Positioning Method Based on Slip Ratio Compensation for Intelligent Vehicles
[J]. Automotive Engineering, 2025, 47(5): 851-858.
|
| [7] |
Bing Zhu,Rui Tang,Jian Zhao,Peixing Zhang,Wenxu Li,Jiasheng Li,Xuefeng Xu.
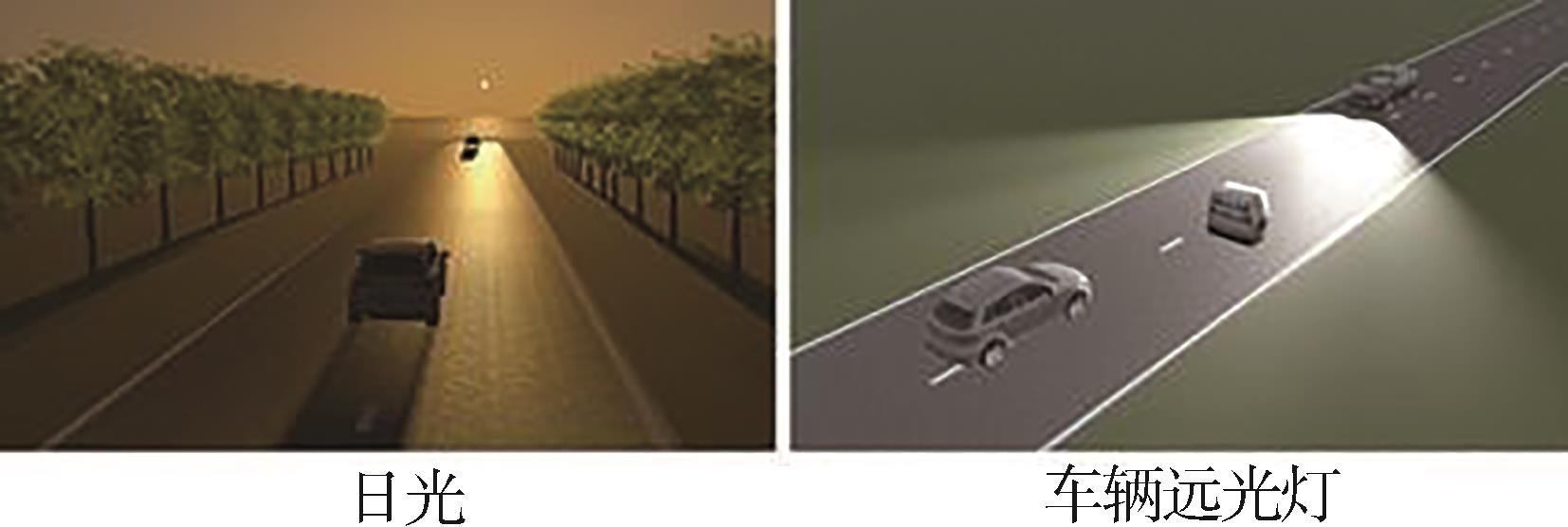
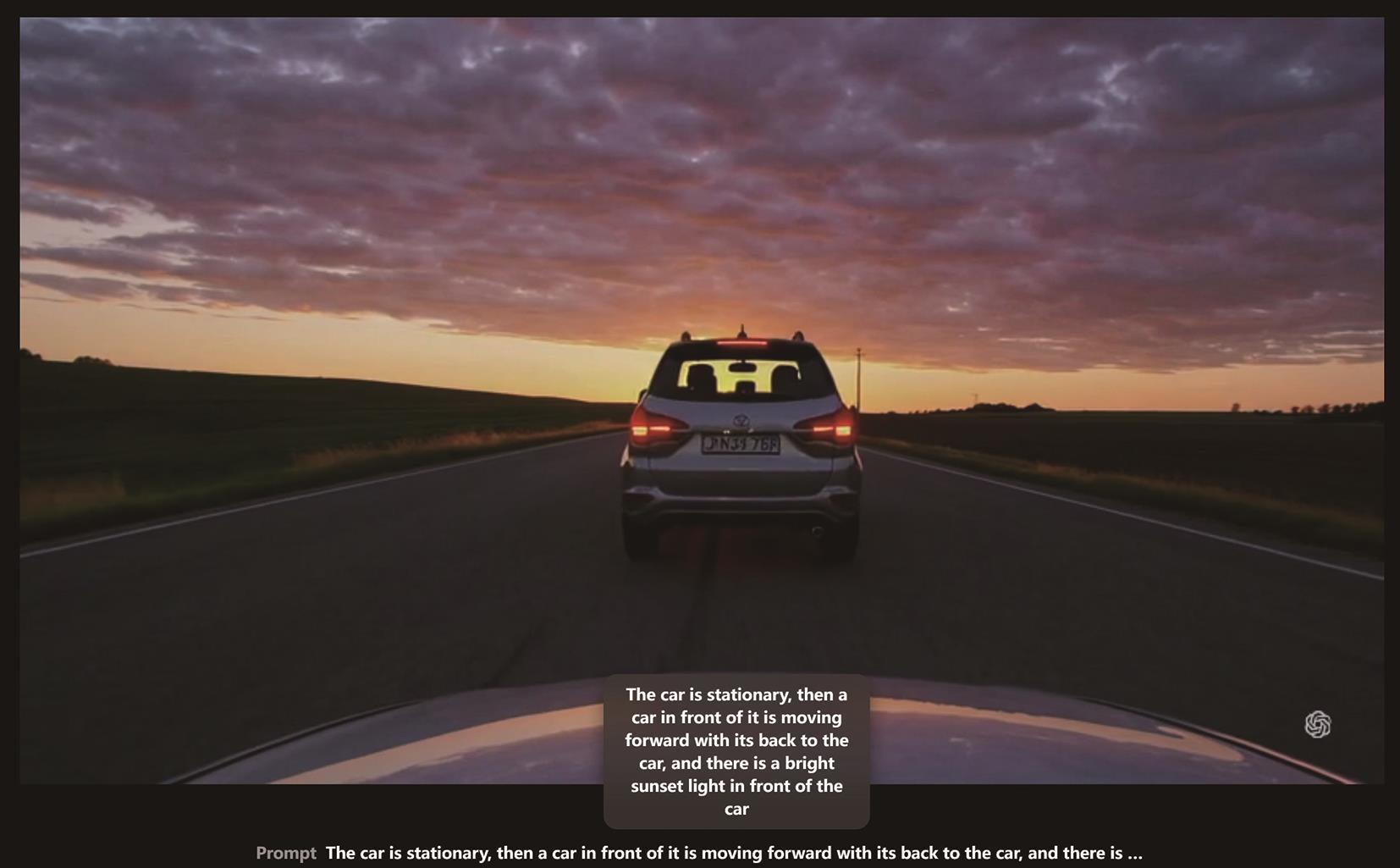
Virtual Simulation Testing Method for Intelligent Vehicle Based on Large Language Model
[J]. Automotive Engineering, 2025, 47(4): 587-597.
|
| [8] |
Ningning Tu,An Cao,Mu Yuan,Mingyang Hou,Shengping Liang.
Research on Autonomous Emergency Steering of Vehicle Based on Offline Path Planning and iLQR Control
[J]. Automotive Engineering, 2025, 47(10): 1933-1941.
|
| [9] |
Xianghao Meng,Ling Niu,Junqiang Xi,Danni Chen,Chao Lü.
Risk Prediction of Heterogeneous Traffic Participants Based on Spatio-Temporal Graph Neural Networks
[J]. Automotive Engineering, 2024, 46(9): 1537-1545.
|
| [10] |
Xiujian Yang,Yongrui Bai.
Trajectory Planning for Intelligent Vehicle in Dynamic Unstructured Environment Based on the Graph Search and Optimization Methods
[J]. Automotive Engineering, 2024, 46(9): 1564-1575.
|
| [11] |
Jing Zhao,Hao Liang,Tianxiao Xu,Yayue Xiao,Bowen Jiang.
Research on Domain Specific Modeling Language for Intelligent Vehicle Cyber-Physical System
[J]. Automotive Engineering, 2024, 46(8): 1370-1381.
|
| [12] |
Jialiang Zhu,Qiaobin Liu,Fan Yang,Lu Yang,Weihua Li.
Two-Dimensional Collision Risk Prediction for Intelligent Vehicles Considering the Influence of Heterogeneous Vehicle Types
[J]. Automotive Engineering, 2024, 46(8): 1414-1421.
|
| [13] |
Xiaolin Fan,Xudong Zhang,Yuan Zou,Xin Yin,Yingqun Liu.
A Mapping and Planning Method Based on Simplified Visibility Graph
[J]. Automotive Engineering, 2024, 46(7): 1249-1258.
|
| [14] |
Shuen Zhao,Sheng Wang,Yao Leng.
Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking
[J]. Automotive Engineering, 2024, 46(5): 784-794.
|
| [15] |
Bing Zhu,Yinzi Huang,Jian Zhao,Peixing Zhang,Jingwei Xue.
A Criticality Assessment Model for the Intelligent Vehicle Test Scenario Based on the Onboard Camera Images
[J]. Automotive Engineering, 2024, 46(4): 557-563.
|
 ),Zhitong Gao1,Jiayi Han1,Xinwei Fan2
),Zhitong Gao1,Jiayi Han1,Xinwei Fan2