Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (11): 1565-1576.doi: 10.19562/j.chinasae.qcgc.2021.11.001
Jiqing Chen,Chubin Weng,Fengchong Lan( )
)
Received:2021-06-29
Revised:2021-08-09
Online:2021-11-25
Published:2021-11-22
Contact:
Fengchong Lan
E-mail:fclan@scut.edu.cn
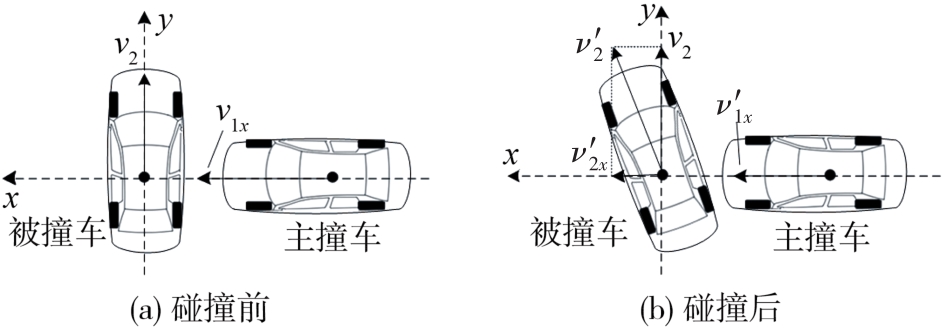
Jiqing Chen,Chubin Weng,Fengchong Lan. Potential Conflict Analysis and Risk Quantification Method of Intelligent Vehicle Lane Change[J].Automotive Engineering, 2021, 43(11): 1565-1576.
"

"

"
"

"
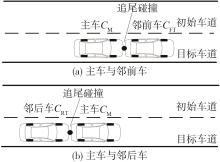
| 旁车 | 潜在冲突 | ||
|---|---|---|---|
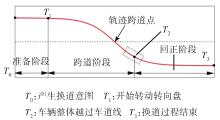
| 准备阶段 | 跨道阶段 | 回正阶段 | |
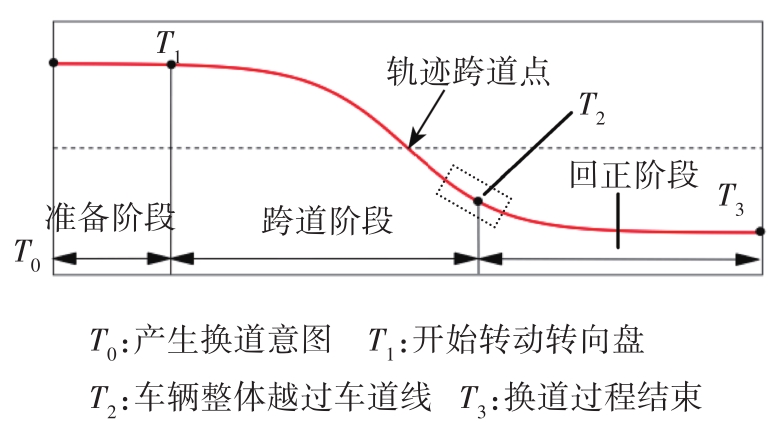
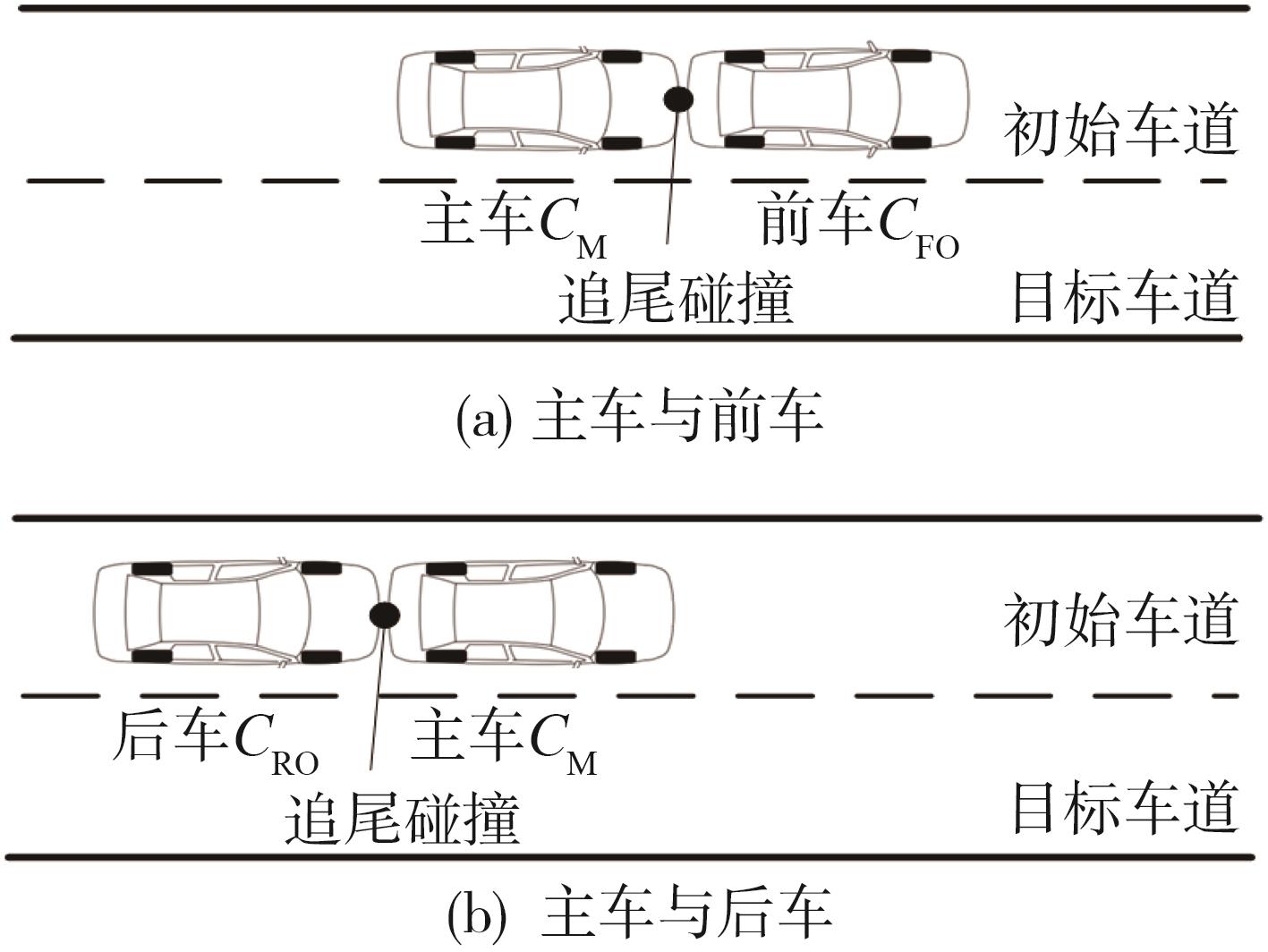
| 前车CFO | 追尾碰撞 | 追尾碰撞 | 无 |
| 后车CRO | 追尾碰撞 | 追尾碰撞 | 无 |
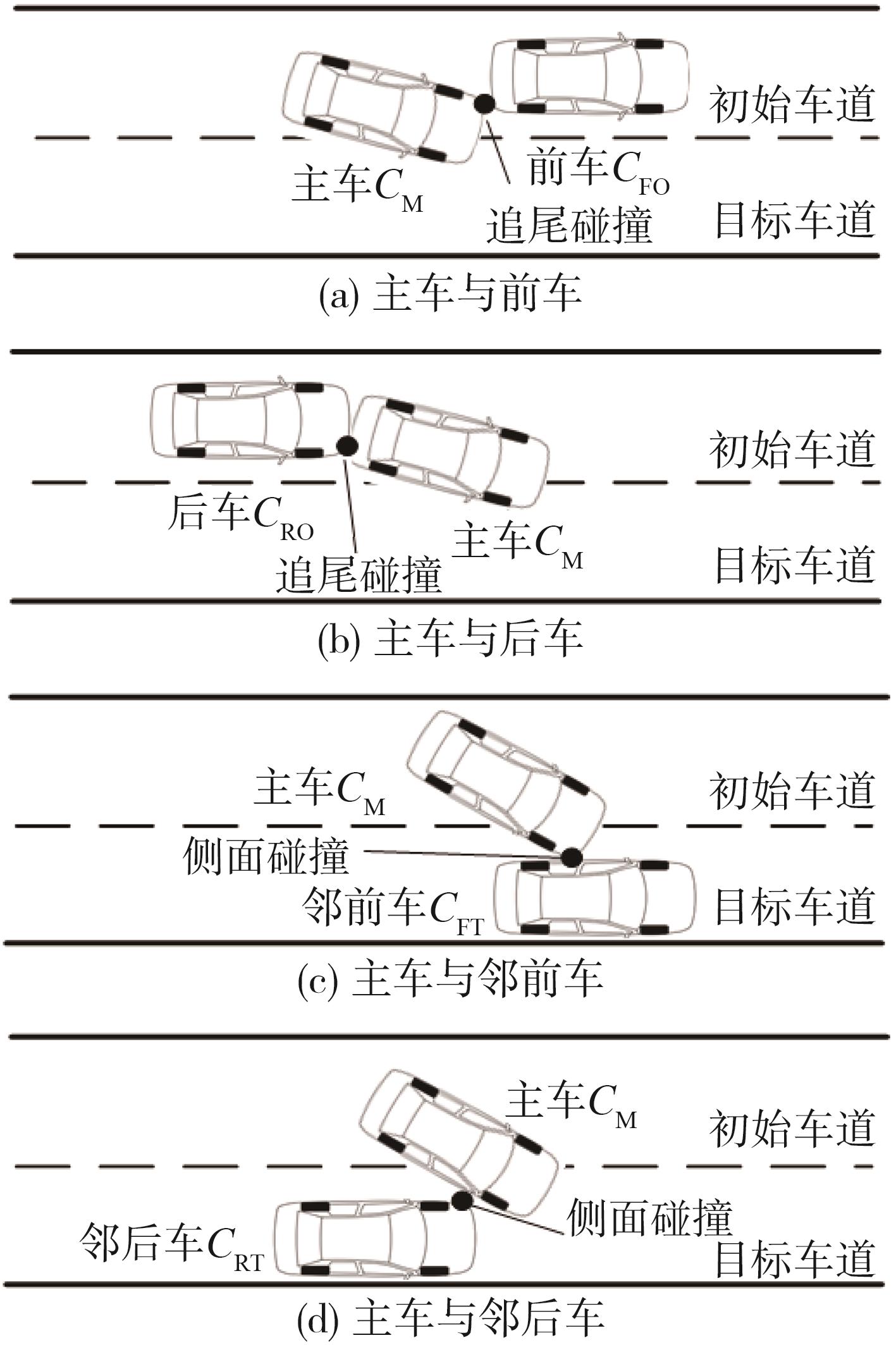
| 邻前车CFT | 无 | 侧面碰撞 | 追尾碰撞 |
| 邻后车CRT | 无 | 侧面碰撞 | 追尾碰撞 |

"

"

"

"
"
| 百分位 | LEImax | RSL | y |
|---|---|---|---|
| 0 | L0 | 0 | 0 |
| 10 | L10 | 0.1 | 0.11 |
| 20 | L20 | 0.2 | 0.22 |
| 30 | L30 | 0.3 | 0.36 |
| 40 | L40 | 0.4 | 0.51 |
| 50 | L50 | 0.5 | 0.69 |
| 60 | L60 | 0.6 | 0.92 |
| 70 | L70 | 0.7 | 1.20 |
| 80 | L80 | 0.8 | 1.61 |
| 90 | L90 | 0.9 | 2.30 |
"

"

"

"
"
| 参数 | 高尔夫轿车 | 奔驰重型载货车 |
|---|---|---|
| 长/m | 4.578 | 9.750 |
| 宽/m | 1.799 | 2.507 |
| 满载质量/kg | 1 781 | 26 000 |
| 质量尺寸比/(kg·m-2) | 216.2 | 1 064 |

"
"
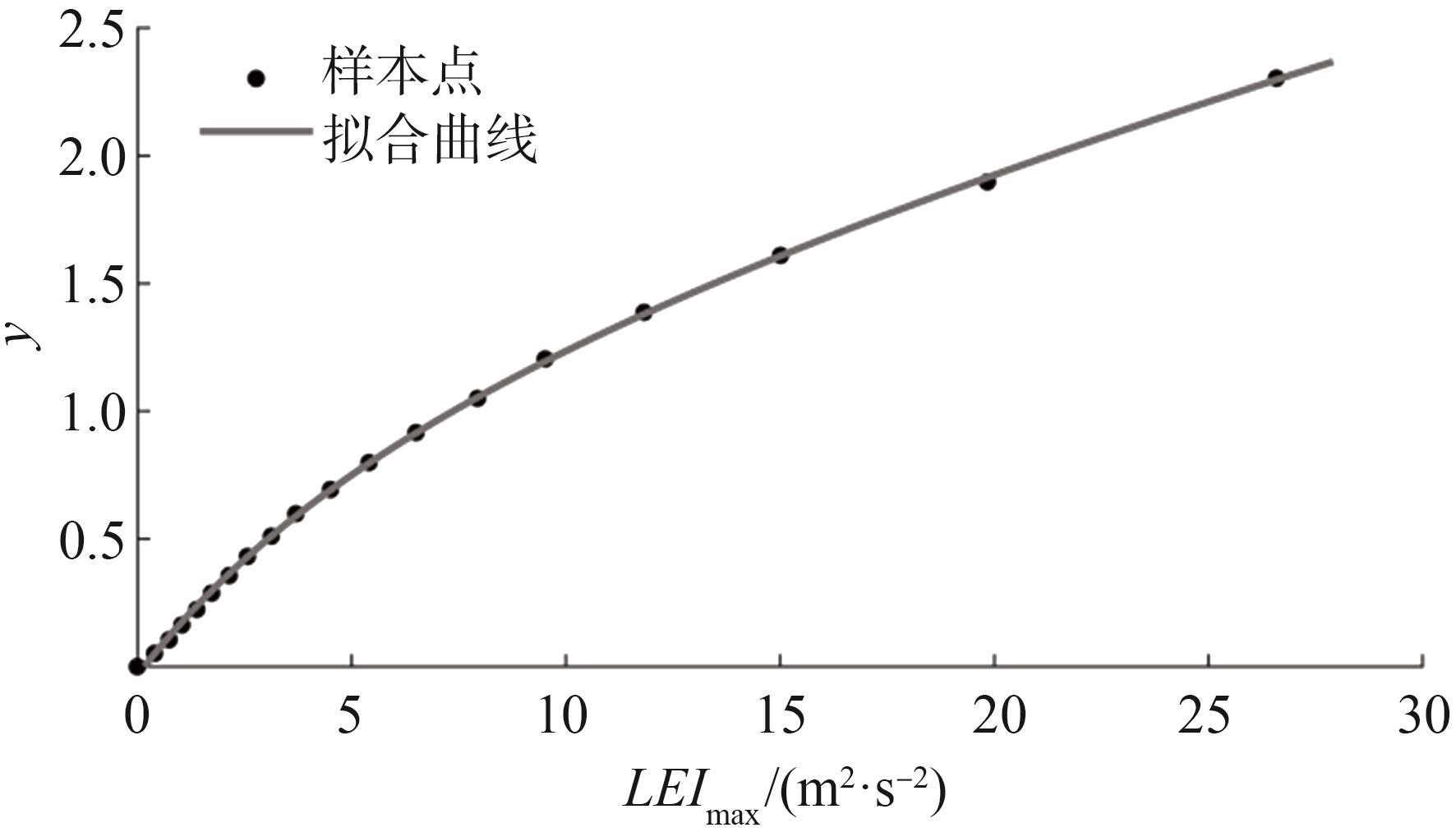
| 百分位 | LEImax | RSL | y |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 10 | 0.74 | 0.1 | 0.11 |
| 20 | 1.38 | 0.2 | 0.22 |
| 30 | 2.14 | 0.3 | 0.36 |
| 40 | 3.13 | 0.4 | 0.51 |
| 50 | 4.51 | 0.5 | 0.69 |
| 60 | 6.50 | 0.6 | 0.92 |
| 70 | 9.52 | 0.7 | 1.20 |
| 80 | 15.02 | 0.8 | 1.61 |
| 90 | 26.59 | 0.9 | 2.30 |

"

"
"
"
| 换道类型 | 统计指标 | 换道总时长/s | 风险暴露时长/s | 最大损失能量指数/ (m2·s-2) |
|---|---|---|---|---|
| 自由换道 | 平均值 | 4.964 6 | 1.293 5 | 3.364 1 |
| 最大值 | 7.960 0 | 7.520 0 | 158.140 4 | |
| 最小值 | 2.360 0 | 0 | 0 | |
| 方差 | 0.615 2 | 2.829 2 | 78.650 9 | |
| 强制换道 | 平均值 | 5.064 9 | 4.075 3 | 15.422 7 |
| 最大值 | 8.560 0 | 8.000 0 | 146.197 8 | |
| 最小值 | 2.520 0 | 0 | 0 | |
| 方差 | 0.734 8 | 0.962 4 | 327.346 7 |

"
"

"
| 1 | HOU Y, EDARA P, SUN C. Situation assessment and decision making for lane change assistance using ensemble learning methods[J]. Expert Systems with Applications, 2015, 42(8):3875-3882. |
| 2 | FERREIRA S, COUTO A. A probabilistic approach towards a crash risk assessment of urban segments[J]. Transportation Research Part C: Emerging Technologies, 2015, 50:97-105. |
| 3 | GLAUZ W D, MIGLETZ D J. Application of traffic conflict analysis at intersections[M]. Transportation Research Board, National Research Council, 1980. |
| 4 | 孙立云. 城市道路交叉口事故预测模型及算法研究[D]. 北京:北京交通大学, 2011. |
| SUN L Y. Research on urban road intersection-accident prediction model and algorithm[D]. Beijing: Beijing Jiaotong University, 2011. | |
| 5 | PARK H, OH C, MOON J, et al. Development of a lane change risk index using vehicle trajectory data [J]. Accident Analysis & Prevention, 2018, 110:1-8. |
| 6 | ZHENG L, SAYED T. From univariate to bivariate extreme value models: approaches to integrate traffic conflict indicators for crash estimation[J]. Transportation Research Part C: Emerging Technologies, 2019, 103:211-225. |
| 7 | 容颖, 温惠英, 赵胜. 高速公路单向双车道车辆群行车风险度量研究[J]. 重庆交通大学学报(自然科学版), 2019, 38(9): 95-100. |
| RONG Y, WEN H, ZHAO S. Study on driving risk measurement for two⁃lane freeway vehicle group[J]. Journal of Chongqing Jiaotong University(Natural Science), 2019, 38(9): 95-100. | |
| 8 | OH C, KIM T. Estimation of rear-end crash potential using vehicle trajectory data[J]. Accident Analysis & Prevention, 2010, 42(6):1888-1893. |
| 9 | WENG J, DU G, LI D, et al. Time⁃varying mixed logit model for vehicle merging behavior in work zone merging areas[J]. Accident Analysis and Prevention, 2018, 117(AUG.):328-339. |
| 10 | 周斌宇. 基于车车协同的车辆安全换道预警机制研究[D]. 长春: 吉林大学, 2020. |
| Zhou B Y. Research on vehicle safety lane change warning strategy based on vehicle⁃to⁃vehicle collaboration[D]. Changchun:Jilin University, 2020. | |
| 11 | 何爱生. 考虑后车减速度的换道预警阈值研究[D]. 西安: 长安大学, 2019. |
| HE A S. Research on the lane change warning threshold considering the deceleration of the rear vehicles[D]. Xi’an: Chang’an University, 2019. | |
| 12 | 杨俊. 车辆频繁换道对道路行车效率与安全影响研究[D].西安: 长安大学, 2016. |
| YANG J. Research on the efficiency and safety of frequent lane change in urban roads[D]. Xi’an: Chang’an University, 2016. | |
| 13 | 王畅, 付锐, 郭应时, 等. 换道预警系统中越线时间的预测方法[J]. 汽车工程, 2014, 36(4):509-514. |
| WANG C, FU R, GUO Y, et al. Prediction method of time-to-line⁃crossing in lane change warning system[J]. Automotive Engineering, 2014, 36(4):509-514. | |
| 14 | 何仁, 赵晓聪, 杨奕彬, 等. 基于驾驶人风险响应机制的人机共驾模型[J].吉林大学学报(工学版), 2021, 51(3):799-809. |
| HE R, ZHAO X C, YANG Y B, et al. Man⁃machine shared driving model using risk⁃response mechanism of human driver[J]. Journal of Jilin University (Engineering and Technology Edition), 2021, 51(3):799-809. | |
| 15 | SVENSSON A. A method for analysing the traffic process in a safety perspective [D]. Lund University, 1998. |
| 16 | PARK H, OH C, MOON J, et al. Development of a lane change risk index using vehicle trajectory data[J]. Accident Analysis and Prevention, 110(JAN.):1-8 |
| 17 | 张航, 张肖磊, 吕能超. 高速公路停车视距可靠性设计[J]. 公路交通科技, 2019, 36(4):44-49,87. |
| ZHANG H, ZHANG X L, LV N C, et al. Reliability design for stopping sight distance of expressway[J]. Journal of Highway and Transportation Research and Development, 2019, 36(4):44-49,87. | |
| 18 | BAGDADI O. Estimation of the severity of safety critical events[J]. Accident Analysis and Prevention, 2013, 50:167-174. |
| 19 | 丁明, 肖遥, 张晶晶, 等. 基于事故链及动态故障树的电网连锁故障风险评估模型[J]. 中国电机工程学报, 2015, 35(4):821-829. |
| DING M, XIAO Y, ZHANG J, et al. Risk assessment model of power grid cascading failures based on fault chain and dynamic fault tree[J]. Proceedings of the Csee, 2015, 35(4):821-829. | |
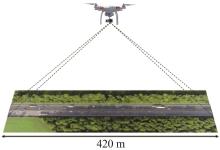
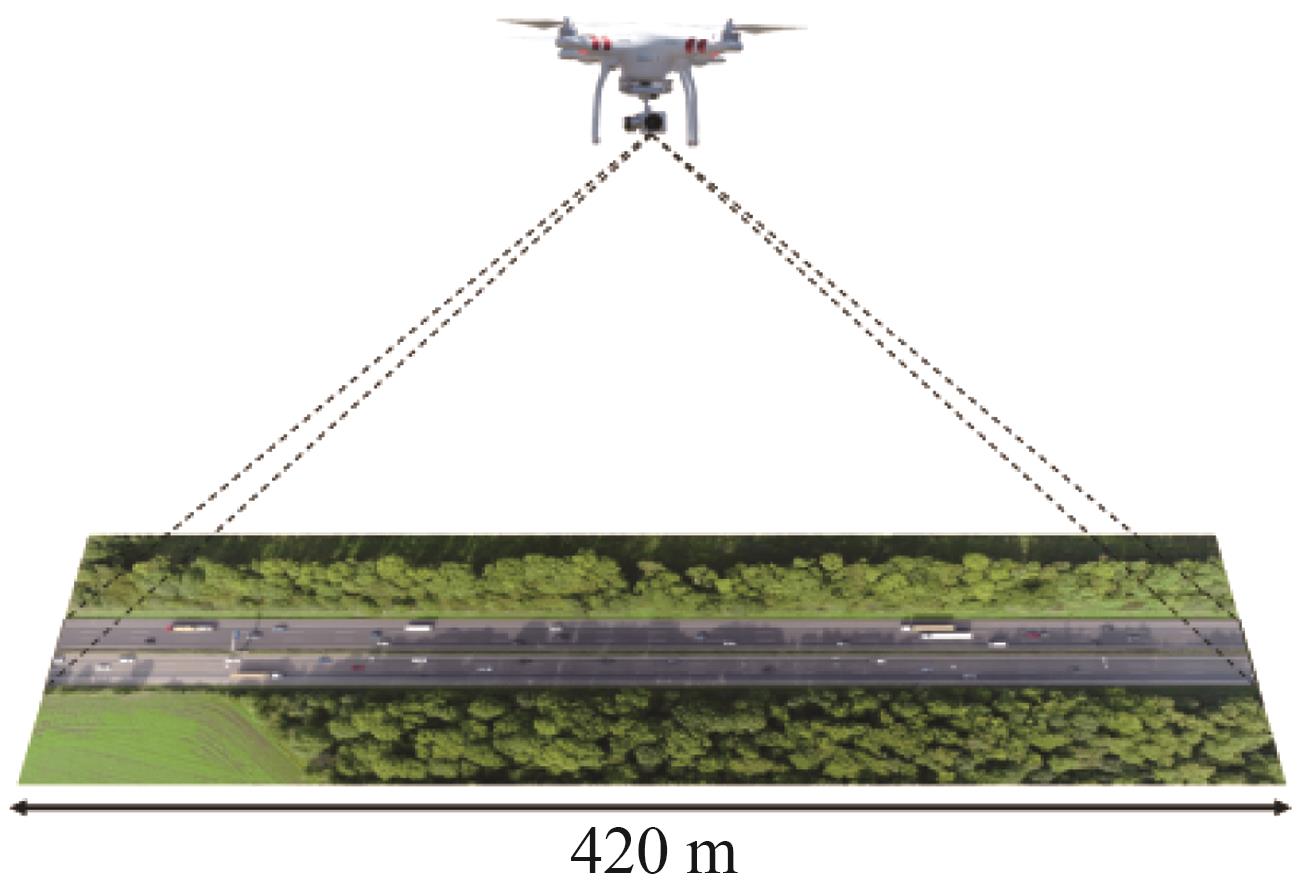
| 20 | KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highD dataset: a drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems[C]. Maui, HI, USA:IEEE International Conference on Intelligent Transportation Systems (ITSC), 2018:2118-2125. |
| 21 | 杨智强. 从德国高速公路看事故预防先进做法[J]. 湖南交通科技, 2019, 45(3):208-214. |
| YANG Z Q. Advanced methods of accident prevention from German expressway[J]. Hunan Communication Science and Technology, 2019, 45(3):208-214. | |
| 22 | 蔡英凤, 朱南楠, 邰康盛, 等. 基于注意力机制的车辆行为预测[J]. 江苏大学学报(自然科学版), 2020, 41(2):125-130. |
| CAI Y F, ZHU N N, TAI K S, et al. Vehicle behavior prediction based on attention mechanism[J]. Journal of Jiangsu University (Natural Science), 2020, 41(2):125-130. | |
| 23 | 田洪清, 丁峰, 郑讯佳, 等. 基于势能场虚拟力的智能网联车辆运动规划[J]. 汽车工程, 2021, 43(4):518-526. |
| TIAN H Q, DING F, ZHENG X J, et al. Motion planning based on virtual force of potential field for intelligent connected vehicles[J]. Automotive Engineering, 2021, 43(4):518-526. | |
| 24 | 季学武, 费聪, 何祥坤, 等. 基于 LSTM 网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32(6):34-42. |
| JI X W, FEI C, HE X K,et al. Intention recognition and trajectory prediction for vehicle using LSTM network[J]. China Journal of Highway and Transport, 2019, 32(6):34-42. | |
| 25 | 工程师测评. 德国2019年全年新车销量[EB/OL]. https://chejiahao.autohome.com.cn/info/5502083. |
| EvaluationEngineer. New car sales in Germany in 2019[EB/OL]. https://chejiahao.autohome.com.cn/info/5502083. | |
| 26 | 张驰. 基于驾驶员风险认知的自动驾驶车辆运动规划研究[D]. 长春吉林大学, 2020. |
| ZHANG Chi. Research on motion planning of autonomous vehicle based on driver's hazard perception[D].Changchun:Jilin University, 2020. |
| [1] | Shurui Guan,Keqiang Li,Junyu Zhou,Jia Shi,Weiwei Kong,Yugong Luo. A Cooperative Lane Change Strategy for Intelligent Connected Vehicles Oriented to Mandatory Lane Change Scenarios [J]. Automotive Engineering, 2024, 46(2): 201-210. |
| [2] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [3] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [4] | Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention [J]. Automotive Engineering, 2023, 45(8): 1448-1456. |
| [5] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |
| [6] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [7] | Zixian Li,Shiju Pan,Yuan Zhu,Binbing He,Youchun Xu. Semi-active Suspension Control for Intelligent Vehicles Based on State Feedback and Preview Feedforward [J]. Automotive Engineering, 2023, 45(5): 735-745. |
| [8] | Lü Yanzhi,Chao Wei,Yuanhao He. An End-to-End Lane Change Method for Autonomous Driving Based on GCN and CIL [J]. Automotive Engineering, 2023, 45(12): 2310-2317. |
| [9] | Shiju Pan,Yongle Li,Zixian Li,Binbing He,Yuan Zhu,Youchun Xu. Path Following Method of Intelligent Vehicles Based on Improved Pure Tracking [J]. Automotive Engineering, 2023, 45(1): 1-8. |
| [10] | Wenbo Shao,Jun Li,Yuxin Zhang,Hong Wang. Key Technologies to Ensure the Safety of the Intended Functionality for Intelligent Vehicles [J]. Automotive Engineering, 2022, 44(9): 1289-1304. |
| [11] | Zihao Wang,Yingfeng Cai,Hai Wang,Long Chen,Xiaoxia Xiong. Surrounding Multi-Target Trajectory Prediction Method Based on Monocular Visual Motion Estimation [J]. Automotive Engineering, 2022, 44(9): 1318-1326. |
| [12] | Zewu Deng,Zhaozheng Hu,Zhe Zhou, LiuYulin,Chao Peng. Intelligent Vehicle Positioning by Fusing LiDAR and Double-layer Map Model [J]. Automotive Engineering, 2022, 44(7): 1018-1026. |
| [13] | Xinyu Chen,Lijun Qian,Qidong Wang. Eco-driving Control at Signalized Intersections with Consideration of Time Delay [J]. Automotive Engineering, 2022, 44(7): 960-968. |
| [14] | Jian Zhao,Dongjian Song,Bing Zhu,Hangzhe Wu,column:Han Jiayi,Yuxiang Liu. Traffic Vehicles Intention Recognition Method Driven by Data and Mechanism Hybrid [J]. Automotive Engineering, 2022, 44(7): 997-1008. |
| [15] | Bin Tang,Zhanxiang Xu,Haobin Jiang,Yingfeng Cai,Zitian Hu,Zhengyi Yang. Trajectory Planning of Intelligent Vehicles in Lane Change for Collision Avoidance Based on Segmented Optimization [J]. Automotive Engineering, 2022, 44(6): 831-841. |