Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (7): 1096-1104.doi: 10.19562/j.chinasae.qcgc.2021.07.017
Previous Articles Next Articles
Anjie Wang1,Ling Zheng1( ),Yinong Li1,Kan Wang2,3
),Yinong Li1,Kan Wang2,3
Received:2020-12-15
Revised:2021-02-05
Online:2021-07-25
Published:2021-07-20
Contact:
Ling Zheng
E-mail:zling@cqu.edu.cn
Anjie Wang,Ling Zheng,Yinong Li,Kan Wang. Motion Planning for Active Collision Avoidance of Intelligent Vehicles Based on Predictive Risk Field[J].Automotive Engineering, 2021, 43(7): 1096-1104.

"

"

"
算法1 变步长搜索算法求投影坐标 | |
|---|---|
输入:道路参考线,起始A/B点和车辆P点的Cartesian坐标 | |
输出:车辆位置P点的Frenet坐标 | |
1: | function |
2: | |
3: | while |
4: | if |
5: | |
6: | |
7: | break |
8: | end if |
9: | while |
10: | |
11: | |
12: | |
13: | end while |
14: | |
15: | |
16 | break |
17: | end while |
18: | end function |

"

"


"

"

"
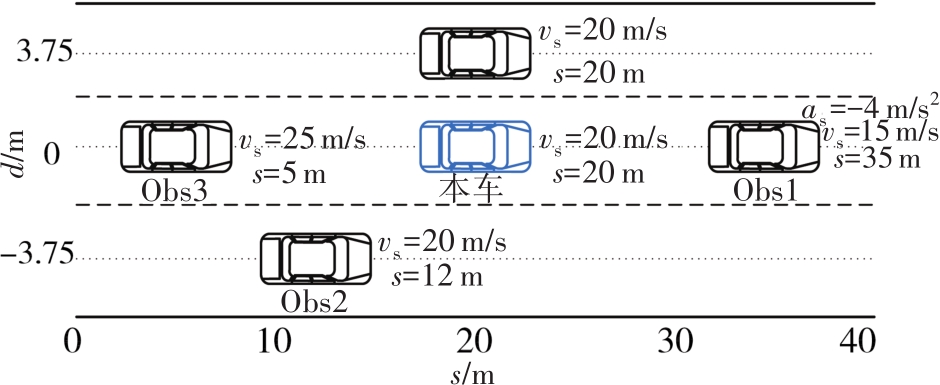
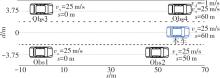
| 参数 | 本车 | Obs1 | Obs2 | Obs3 | Obs4 |
|---|---|---|---|---|---|
| 纵向位置s /m | 20 | 35 | 12 | 5 | 20 |
| 横向位置d/m | 0 | 0 | -3.75 | 0 | 3.75 |
| 纵向速度vs/(m·s-1) | 20 | 15 | 20 | 25 | 20 |
| 横向速度vd/(m·s-1) | 0 | 0 | 0 | 0 | -1 |
| 纵向加速度as/(m·s-2) | 0 | -4 | 0 | 0 | 0 |
| 横向加速度ad/(m·s-2) | 0 | 0 | 0 | 0 | 0 |
| 纵向安全距离smin/m | 3 | ||||
| 横向安全距离dmin/m | 2 | ||||
| 车辆长度L/m | 5 | ||||
| 车辆宽度W/m | 1.7 | ||||
| 车道宽度lanew/m | 3.75 | ||||
| 车道线风险值p | 0.2 | ||||
| 道路参考线:3阶贝塞尔曲线 | (0,0),(30,0),(60,0),(100,20) | ||||

"


"

"

"

"


"

"

"

"


"

| 1 | SAM D , CYRIL RAJ V , ESTHER EVANGELIN T. A vehicle control system using a time synchronized Hybrid VANET to reduce road accidents caused by human error[J]. Vehicular Communications, 2016,6:17-28. |
| 2 | LEE K , KUM D. Collision avoidance/mitigation system: motion planning of autonomous vehicle via predictive occupancy map[J]. IEEE Access, 2019, 7(99):52846-52857. |
| 3 | KIM K , KIM B , LEE K , et al. Design of integrated risk management-based dynamic driving control of automated vehicles[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(1):57-73. |
| 4 | 任玥, 郑玲, 张巍, 等. 基于模型预测控制的智能车辆主动避撞控制研究[J]. 汽车工程, 2019, 41(4): 404-410. |
| REN Y, ZHENG L, ZHANG W, et al. A study on active collision avoidance control of autonomous vehicles based on model predictive control[J]. Automotive Engineering, 2019, 41(4): 404-410. | |
| 5 | 朱冰, 韩嘉懿, 赵健, 等. 基于安全场改进RRT*算法的智能汽车路径规划方法[J]. 汽车工程, 2020, 42(9): 1145-1150, 1182. |
| ZHU B, HAN J Y, ZHAO J, et al. Safety field⁃based improved RRT* algorithm for path planning of intelligent vehicle[J]. Automotive Engineering, 2020, 42(9): 1145-1150, 1182. | |
| 6 | 肖浩, 宋晓琳, 曹昊天. 基于危险斥力场的自动驾驶汽车主动避撞局部路径规划[J]. 工程设计学报, 2012, 19(5): 379-384. |
| XIAO H, SONG X L, CAO H T. Local path planning for autonomous vehicle collision avoidance based on dangerous repellant fields[J]. Chinese Journal of Engineering Design, 2012, 19(5): 379-384. | |
| 7 | 修彩靖, 陈慧. 基于改进人工势场法的无人驾驶车辆局部路径规划的研究[J]. 汽车工程, 2013, 35(9): 808-811. |
| XIU C J, CHEN H. A research on local path planning for autonomous vehicles based on improved APF method[J]. Automotive Engineering, 2013, 35(9): 808-811. | |
| 8 | KIM J , KUM D. Collision risk assessment algorithm via lane-based probabilistic motion prediction of surrounding vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(9):2965-2976. |
| 9 | HESSE T , SATTEL T. An approach to integrate vehicle dynamics in motion planning for advanced driver assistance systems[C]. Intelligent Vehicles Symposium. IEEE, 2007. |
| 10 | HOUENOU A, BONNIFAIT P, CHERFAOUI V, et al. Vehicle trajectory prediction based on motion model and maneuver recognition[C]. IEEE/RSJ International Conference on Intelligent Robots & Systems. IEEE, 2013. |
| 11 | 张一鸣, 周兵, 吴晓建, 等. 基于前车轨迹预测的高速智能车运动规划[J]. 汽车工程, 2020, 42(5): 574-580,587. |
| ZHANG Y M, ZHOU B, WU X J, et al. Motion planning of high speed intelligent vehicle based on front vehicle trajectory prediction[J]. Automotive Engineering, 2020, 42(5): 574-580,587. | |
| 12 | WERLING M , ZIEGLER J , KAMMEL S , et al. Optimal trajectory generation for dynamic street scenarios in a Frenét frame[C]. IEEE International Conference on Robotics & Automation. IEEE, 2010. |
| 13 | LEFÈVRE S, VASQUEZ D, LAUGIER C. A survey on motion prediction and risk assessment for intelligent vehicles[J]. Robomech Journal, 2014, 1(1):1. |
| 14 | 冀杰, 姬鹏, 彭和, 等. 面向车辆主动避撞的三维虚拟危险势能场设计[J]. 汽车工程, 2016, 38(9): 1065-1071. |
| JI J, JI P, PENG H, et al. Design of 3D virtual dangerous potential field for vehicle active collision avoidance[J]. Automotive Engineering, 2016, 38(9): 1065-1071. | |
| 15 | FAN H , ZHU F , LIU C , et al. Baidu Apollo EM motion planner[J]. arXiv preprint arXiv:, 2018. |
| 16 | 熊璐, 康宇宸, 张培志, 等. 无人驾驶车辆行为决策系统研究[J]. 汽车技术, 2018(8): 1-9. |
| XIONG L, KANG Y C, ZHANG P Z, et al. Research on behavior decision⁃making system for unmanned vehicle[J]. Automobile Technology, 2018(8): 1-9. |
| [1] | Xiaocong Zhao,Shiyu Fang,Zirui Li,Jian Sun. Extraction and Application of Key Utility Term for Social Driving Interaction [J]. Automotive Engineering, 2024, 46(2): 230-240. |
| [2] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [3] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [4] | Weiguo Liu,Zhiyu Xiang,Rui Liu,Guodong Li,Zixu Wang. Research on End-to-End Vehicle Motion Planning Method Based on Deep Learning [J]. Automotive Engineering, 2023, 45(8): 1343-1352. |
| [5] | Ming Wang,Xiaolin Tang,Kai Yang,Guofa Li,Xiaosong Hu. A Motion Planning Method for Autonomous Vehicles Considering Prediction Risk [J]. Automotive Engineering, 2023, 45(8): 1362-1372. |
| [6] | Wei Ran,Hui Chen,Jiaxin Yang,Nishimura Yosuke,Chaopeng Guo,Youyu Yin. Design Method of Motion Planning Reward Function Based on Utility Theory [J]. Automotive Engineering, 2023, 45(8): 1373-1382. |
| [7] | Lin Hu,Gen Li,Fang Wang,Miao Lin,Ning Wu. Research on Test Scenarios of Passenger Cars and Two-Wheelers at Intersections Based on CIDAS Accident Data [J]. Automotive Engineering, 2023, 45(8): 1417-1427. |
| [8] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [9] | Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention [J]. Automotive Engineering, 2023, 45(8): 1448-1456. |
| [10] | Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road [J]. Automotive Engineering, 2023, 45(7): 1099-1111. |
| [11] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |
| [12] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [13] | Yu Zhang,Mingfan Xu,Guangyu Bai,Mingming Dong,Li Gao,Yechen Qin. Intelligent Vehicle Switching Control Considering Dynamic Stability Constraints [J]. Automotive Engineering, 2023, 45(5): 709-718. |
| [14] | Zixian Li,Shiju Pan,Yuan Zhu,Binbing He,Youchun Xu. Semi-active Suspension Control for Intelligent Vehicles Based on State Feedback and Preview Feedforward [J]. Automotive Engineering, 2023, 45(5): 735-745. |
| [15] | Xiang Gao,Long Chen,Xinye Wang,Xiaoxia Xiong,Yicheng Li,Yuexia Chen. Intelligent Vehicle Driving Risk Assessment Method Based on Trajectory Prediction [J]. Automotive Engineering, 2023, 45(4): 588-597. |
|