Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2021, Vol. 43 ›› Issue (7): 962-970.doi: 10.19562/j.chinasae.qcgc.2021.07.002
Previous Articles Next Articles
Yang Liu1,Changfu Zong1,Hongyu Zheng1,Xiaojian Han1,Dong Zhang2( ),Kaku Chuyo3
),Kaku Chuyo3
Received:2020-11-16
Revised:2021-01-27
Online:2021-07-25
Published:2021-07-20
Contact:
Dong Zhang
E-mail:dr_dongzhang@outlook.com
Yang Liu,Changfu Zong,Hongyu Zheng,Xiaojian Han,Dong Zhang,Kaku Chuyo. Two⁃dimensional Tracking Control Algorithm for Vehicle Platoon Based on Reference Vector Field[J].Automotive Engineering, 2021, 43(7): 962-970.

"
"
"

"
"
| 参数 | 含义 | 数值 |
|---|---|---|
| Np | MPC预测步长 | 50 |
| Nc | MPC控制步长 | 4 |
| T | 仿真步长 | 0.01 s |
| HRVF状态权重矩阵(对角) | 10 000,10 000,30 | |
| HRVF控制权重矩阵(对角) | 1,1,1 | |
| Tpre | HRVF预瞄时间 | 0.05 s |
"

"

"
| 跟踪控制算法 | 时间复杂性 |
|---|---|
| 事后法 | |
| MPC | 1.713 88 sec/sim. sec |
| HRVF | 0.091 56 sec/sim. sec |

"

"
"
"

"
| 控制分配算法 | 时间复杂性 | 轮胎利用率/% | |
|---|---|---|---|
| 事后法 | 平均 | 最大 | |
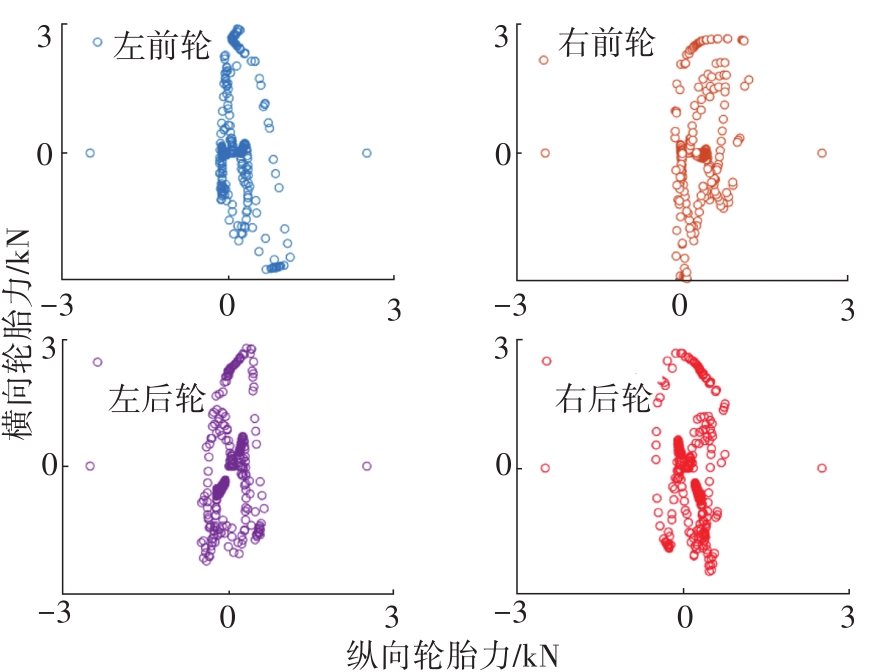
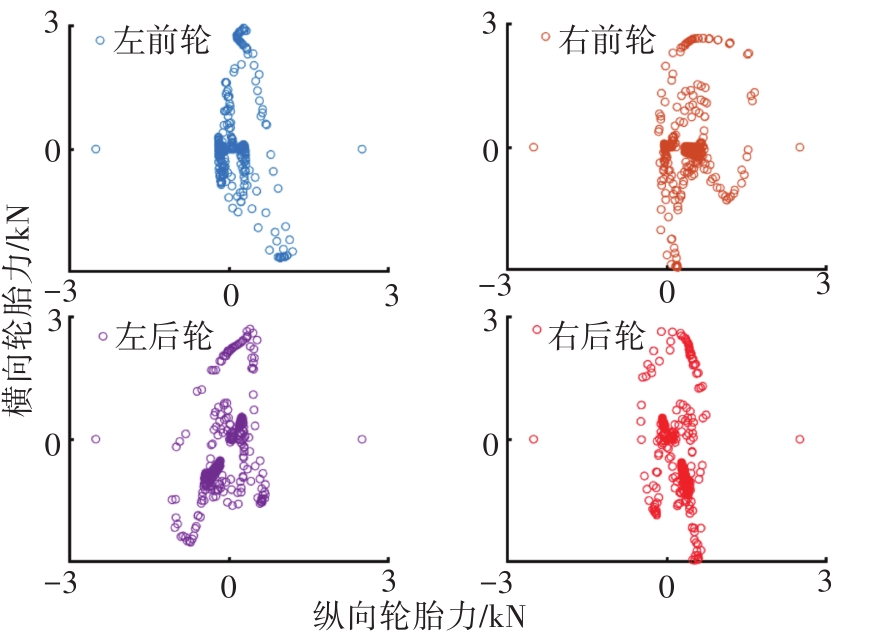
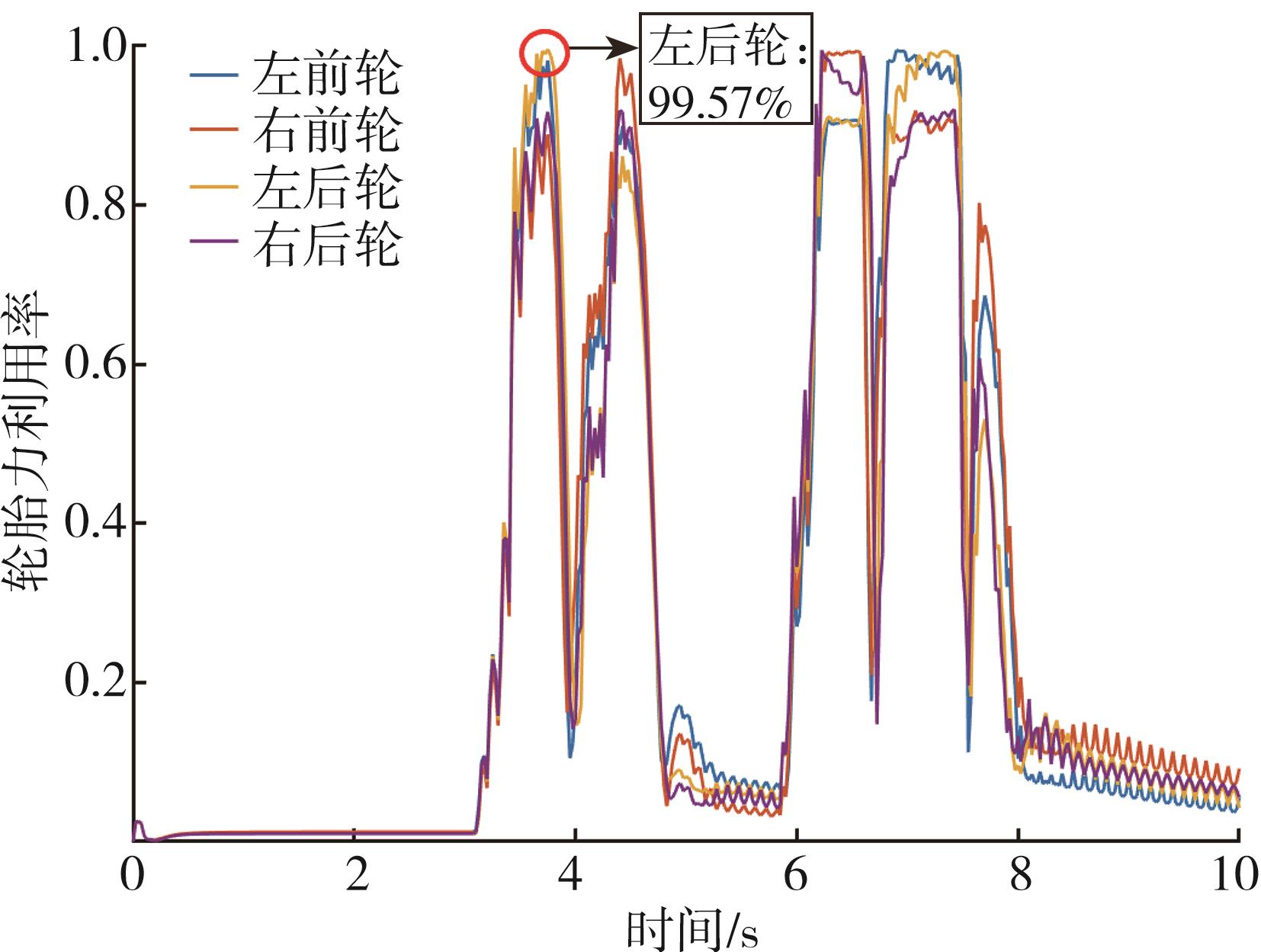
| 线性二次规划 | 1.720 56 sec/sim. sec | 27.192 2 | 99.57 |
| 直接伪逆 | 1.052 62 sec/sim. sec | 28.892 3 | 100 |
"
"
"
| 1 | SWAROOP D, YOON S M, et al. Integrated lateral and longitudinal vehicle control for an emergency lane change manoeuvre design[J]. International Journal of Vehicle Design, 1999, 21(2-3): 161-174. |
| 2 | BAYUWINDRA A, AAKRE O L, PLOEG J. Combined lateral and longitudinal CACC for a unicycle⁃type platoon[C]. IEEE Intelligent Vehicles Symposium, Proceedings, 2016, 2016-Augus (Iv): 527-532. |
| 3 | LIU Y, ZONG C, ZHANG D. Lateral control system for vehicle platoon considering vehicle dynamic characteristics[J]. IET Intelligent Transport Systems, 2019, 13(9): 1356-1364. |
| 4 | LIU Y, ZHANG D, GORDON T. Approach of coordinated control method for over⁃actuated vehicle platoon based on reference vector field[J]. Applied Sciences (Switzerland), 2019, 9(2). |
| 5 | LEFEBER E, PLOEG J, NIJMEIJER H. A spatial approach to control of platooning vehicles: separating path⁃following from tracking[J]. IFAC⁃PapersOnLine, Elsevier B.V., 2017, 50(1): 15000-15005. |
| 6 | RAJAMANI R, TAN H S, LAW B K, et al. Demonstration of integrated longitudinal and lateral control for the operation of automated vehicles in platoons[J]. IEEE Transactions on Control Systems Technology, 2000, 8(4): 695-708. |
| 7 | PAPADIMITRIOU I, LU G, TOMIZUKA M, et al. Autonomous lateral following consideration for vehicle platoons[C]. IEEE/ASME International Conference on Advanced Intelligent Mechatronics, AIM, 2003, 1: 401-406. |
| 8 | PAPADIMITRIOU I, TOMIZUKA M, et al. Lateral control of platoons of vehicles on highways: the autonomous following based approach[J]. International Journal of Vehicle Design, 2004, 36(1): 24-37. |
| 9 | AWAWDEH A M H, ESPINOSA F, MAZO M, et al. Non⁃linear trajectory generation and lateral control new algorithms to minimize Platoon’s oscillations[C]. Proceedings of the American Control Conference, 2004. |
| 10 | KHATIR M E, DAVISON E J. A decentralized lateral⁃longitudinal controller for a platoon of vehicles operating on a plane[C]. Proceedings of the 2006 American Control Conference. Minneapolis, Minnesota, USA:2006: 5891-5896. |
| 11 | FUJIOKA T, SUZUKI K. Control of longitudinal and lateral platoon using sliding control[J]. Vehicle System Dynamics, 2007, 23(1): 647-664. |
| 12 | SOLYOM S, IDELCHI A, BinSALAMAH B. Lateral control of vehicle platoons[C]. Proceedings⁃2013 IEEE International Conference on Systems, Man, and Cybernetics, SMC2013. 2013: 4561-4565. |
| 13 | MCAREE O, VERES S M. Lateral control of vehicle platoons with on⁃board sensing and inter⁃vehicle communication[C]. 2016 European Control Conference, ECC2016, 2016(July): 2465-2470. |
| 14 | 刘志强, 韩静文, 倪捷. 智能网联环境下的多车协同换道策略研究[J]. 汽车工程, 2020, 42(3): 299-306. |
| LIU Zhiqiang, HAN Jingwen, NI Jie. Study on multi⁃vehicle coordinated lane change strategy under network conditions[J]. Automotive Engineering, 2020, 42(3): 299-306. | |
| 15 | LEFEBER E, PLOEG J, NIJMEIJER H. A spatial approach to control of platooning vehicles: separating path⁃following from tracking[J]. IFAC⁃PapersOnLine, Elsevier B.V., 2017, 50(1): 15000-15005. |
| 16 | CARUNTU C F, MAXIM A, RAFAILA R C. Multiple⁃lane vehicle platooning based on a multi⁃agent distributed model predictive control strategy[C]. 2018 22nd International Conference on System Theory, Control and Computing, ICSTCC 2018-Proceedings, IEEE, 2018: 759-764. |
| 17 | 熊璐,杨兴,卓桂荣,等.无人驾驶车辆的运动控制发展现状综述[J].机械工程学报, 2020, 56(10): 127-143. |
| XIONG Lu, YANG Xing, ZHUO Guirong, et al. Review on motion control of autonomous vehicles[J]. Journal of Mechanical Engineering, 2020, 56(10): 127-143. | |
| 18 | GUO J H, LUO Y G, LI K Q. Adaptive fuzzy sliding mode control for coordinated longitudinal and lateral motions of multiple autonomous vehicles in a platoon[J]. Science China Technological Sciences, 2017, 60(4): 576-586. |
| 19 | OPPENHEIMER M W, DOMAN D B, BOLENDER M A. Control allocation for over⁃actuated systems[C]. 14th Mediterranean Conference on Control and Automation, MED’06, 2006: 1-6. |
| 20 | MAX D. Reconfigurable direct control allocation for over⁃actuated systems[C]. IFAC Proceedings Volumes, 2011:4696-4700. |
| 21 | NASKAR A K, PATRA S, SEN S. A reconfigurable direct control allocation method[C]. 2013 European Control Conference (ECC), 2013: 1463-1468. |
| 22 | PLUMLEE J H, BEVLY D M, SCOTTEDWARD HODEL A. Control of a ground vehicle using quadratic programming based control allocation techniques[C]. Proceedings of the American Control Conference, 2004: 4704-4709. |
| 23 | DUAN M, OKWUDIRE C E. Connections between control allocation and linear quadratic control for weakly redundant systems[J/OL]. Automatica, 2019, 101: 96-102. |
| 24 | LUO Y, SERRANI A, YURKOVICH S, et al. Model predictive dynamic control allocation with actuator dynamics[C]. Procee⁃dings of the 2004 American Control Conference. IEEE, 2004. |
| 25 | SAMAN E B, JAVAD K M, ROYA A. Constrained control allocation for nonlinear systems with actuator failures or faults[J]. Tur⁃kish Journal of Electrical Engineering and Computer Sciences, 2017, 25:3152-3163. |
| 26 | NADERI M, JOHANSEN T A, SEDIGH A K. A fault tolerant control scheme using the feasible constrained control allocation strategy[J]. International Journal of Automation and Computing, 2019, 16: 628-643. |
| 27 | SKULSTAD R, THOR R S, THOR R S. Neural neural network network approach approach to to control control neural network approach to allocation of ships for dynamic neural network approach to control control allocation of ships for dynamic allocation positioning of ships for dynamic allocat[J/OL]. IFAC-PapersOnLine, 2018, 51(29): 128–133. |
| 28 | 周维, 过学迅, 裴晓飞, 等. 基于RRT与MPC的智能车辆路径规划与跟踪控制研究[J]. 汽车工程, 2020, 42(9): 1151-1158. |
| ZHOU Wei, GUO Xuexun, PEI Xiaofei, et al. Study on path planning and tracking control for intelligent vehicle based on RRT and MPC[J]. Automotive Engineering, 2020, 42(9): 1151-1158. |
| [1] | Jizheng Liu,Zhenpo Wang,Fengchun Sun,Lei Zhang. Research on Delay Compensation Control for Heterogeneous Connected and Automated Vehicle Platoons [J]. Automotive Engineering, 2023, 45(9): 1573-1582. |
| [2] | Manjiang Hu,Lingkun Bu,Hongmao Qin,Yan Zhou,Yougang Bian,Ning Sun,Xunjia Zheng. Modeling and Cooperative Control of Mixed Vehicle Platoon Under Multi-time Delay [J]. Automotive Engineering, 2022, 44(9): 1359-1371. |
| [3] | Fei Zhao,Jian Wang,Tianlei Zhang,Li Wang,Deyi Li. Model Predictive Control Method for Vehicle Platoon Under Cloud Control Scenes [J]. Automotive Engineering, 2022, 44(2): 179-189. |
| [4] | Xiujian Yang,Xinyu Yin,Jin Gao. Interference Suppression Characteristics of Vehicle Platoon with Periodic Type Control Structure [J]. Automotive Engineering, 2022, 44(12): 1834-1843. |
| [5] | Lijun Qian,Jian Chen,Bing Wu,Liang Xuan,Chen Chen,Liangliang Chen. Eco⁃driving Control for Hybrid Electric Vehicle Platoon with Consideration of Driver Operation Error [J]. Automotive Engineering, 2021, 43(7): 1037-1045. |
| [6] | Dai Wentong, Li Qiliang, Li Zhuoming, Chang Yifei, Yang Zhigang. Investigation into Bonnet Aerodynamic Characteristics of Follower Vehicle in Two-vehicle Platoon at Different Reynolds Numbers [J]. Automotive Engineering, 2020, 42(5): 593-599. |
| [7] | Yang Xiujian, Li Jinyu. Coordinated Control of Vehicular Platooning Based on Nonlinear Model Predictive Control [J]. Automotive Engineering, 2020, 42(2): 184-190. |
| [8] | Shi Jia, Luo Yugong, Qi Yunlong, Li Keqiang. A Model-based Description Method for Key Performance Indicators of DSRC System in Vehicle Platoons [J]. Automotive Engineering, 2020, 42(11): 1449-1457. |
| [9] | Yang Zeyu, Huang Jin, Hu Zhanyi, Xie Guotao, Zhong Zhihua. Distributed Robust Control of Vehicle Platoon for Strict Collision Avoidance [J]. Automotive Engineering, 2020, 42(10): 1312-1319. |
| [10] | Bian Chentong, Yin Guodong, Xu Liwei, Zhang Ning, Zhu Tong. Active Rescue System of Unmanned Vehicle Platoon in Fog Weather [J]. Automotive Engineering, 2020, 42(1): 20-26. |
| [11] | Zhang Tao, Zou Yuan, Zhang Xudong, Liu Xiantao & Wang Wenwei. A Research on Connected Cruise Control with Consideration of Merging [J]. Automotive Engineering, 2019, 41(9): 1028-1035. |