Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2022, Vol. 44 ›› Issue (7): 1018-1026.doi: 10.19562/j.chinasae.qcgc.2022.07.008
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2022年
Previous Articles Next Articles
Zewu Deng1,2,Zhaozheng Hu1,2( ),Zhe Zhou2,3, LiuYulin1,Chao Peng2
),Zhe Zhou2,3, LiuYulin1,Chao Peng2
Received:2022-01-17
Revised:2022-02-19
Online:2022-07-25
Published:2022-07-20
Contact:
Zhaozheng Hu
E-mail:zzhu@whut.edu.cn
Zewu Deng,Zhaozheng Hu,Zhe Zhou, LiuYulin,Chao Peng. Intelligent Vehicle Positioning by Fusing LiDAR and Double-layer Map Model[J].Automotive Engineering, 2022, 44(7): 1018-1026.

"

"
"

"

"
"
| 方法 | 平均误差/m | 最大误差/m |
|---|---|---|
| 文献[ | 1.65 | 4.7 |
| 文献[ | 0.82 | 2.85 |
| 文献[ | 0.68 | 2.25 |
| 文献[ | 0.31 | 1.25 |
"
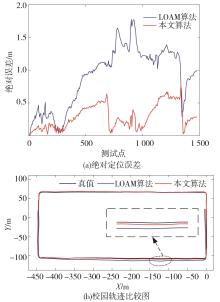
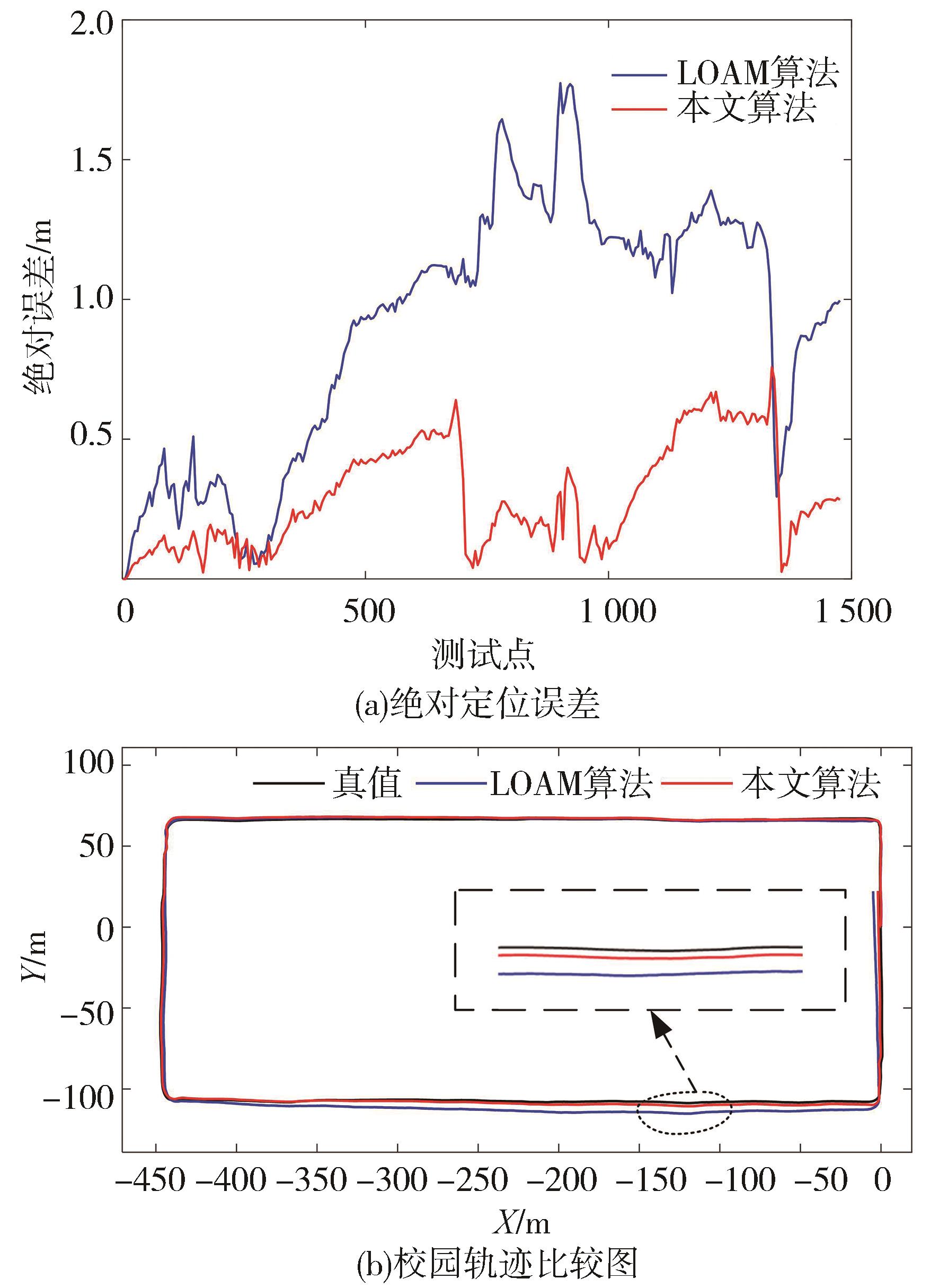
| 方法 | 平均 误差/m | 最大 误差/m | 平均 耗时/ms | 误差1 m以内占比/% |
|---|---|---|---|---|
| 本文算法 | 0.31 | 1.25 | 33.1 | 96.4 |
| 文献[ | 0.62 | 1.81 | 75.3 | 78.2 |
| 文献[ | 0.85 | 2.75 | 40.6 | 60.5 |
"
"
| 方法 | 平均误差/m | 最大误差/m |
|---|---|---|
| 文献[ | 2.34 | 7.78 |
| 文献[ | 0.92 | 3.12 |
| 文献[ | 0.76 | 2.35 |
| 文献[ | 0.47 | 1.53 |
"
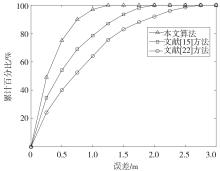
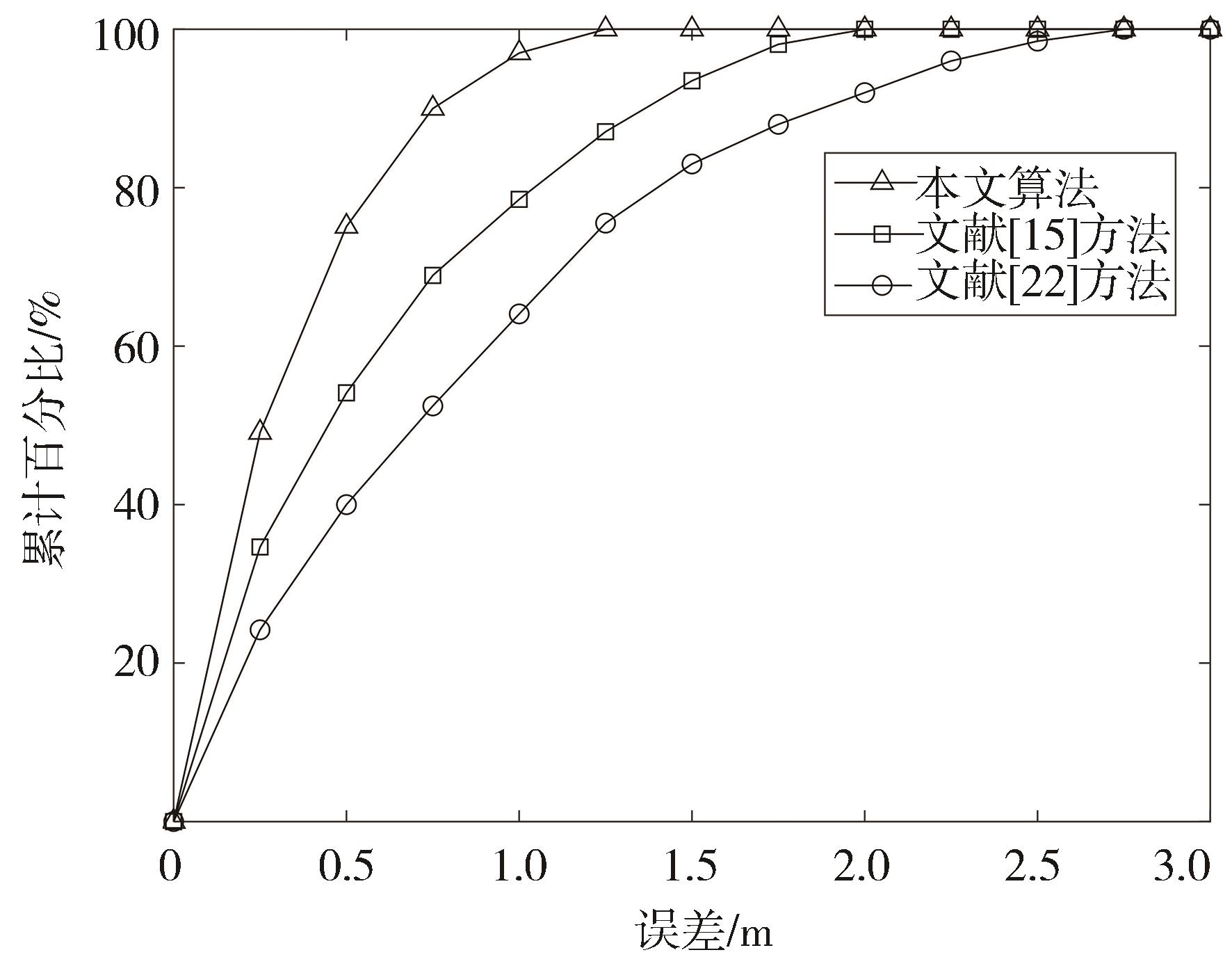
| 方法 | 平均 误差/m | 最大 误差/m | 平均 耗时/ms | 误差1 m以内占比/% |
|---|---|---|---|---|
| 本文算法 | 0.47 | 1.53 | 36.5 | 90.2 |
| 文献[ | 0.79 | 2.51 | 78.7 | 66.5 |
| 文献[ | 1.03 | 3.12 | 45.3 | 52.6 |
"

| 1 | 周苏,李伟嘉,郭军华.基于激光雷达的停车场车辆定位算法[J]. 同济大学学报(自然科学版), 2021, 49(7): 1029-1038. |
| ZHOU S, LI W J, GUO J H. Lidar-based localization algorithm of vehicle in parking lot[J]. Journal of Tongji University(Natural Science), 2021, 49(7): 1029-1038. | |
| 2 | WANG C, HUANG H, JI Y, et al. Vehicle localization at an intersection using a traffic light map[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(4): 1432-1441. |
| 3 | BAI S, LAI J, YU P L, et al. Improved preintegration method for GNSS/IMU/In-Vehicle sensors navigation using graph optimiza-tion[J]. IEEE Transactions on Vehicular Technology, 2021,70(11): 11446-11457. |
| 4 | MUR-ARTAL R, MONTIEL J M M, TARDOS J D. ORB-SLAM:A versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2017, 31(5): 1147-1163. |
| 5 | RUSINKIEWICZ S, LEVOY M. Efficient variants of the ICP algorithm[C]. The 3rd International Conference on 3-D Digital Imaging and Modeling, Quebec, Canada, 2001: 145–152. |
| 6 | ZHANG J, SINGH S. LOAM: LiDAR odometry and mapping in real time[C]. Robotics: Science and Systems Conference, 2014:1-10. |
| 7 | SHAN T X, ENGLOT B. LeGO-LOAM: Lightweight and ground-optimized LiDAR odometry and mapping on variable terrain[C]. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), Madrid,Spain, 2018: 4758–4765. |
| 8 | 秦晓辉,王哲文,庞涛,等. 基于车辆模型紧耦合的封闭园区车辆定位方法[J]. 汽车工程, 2021, 43(9): 1328-1335. |
| QIN X H, WANG Z W, PANG T, et al. Vehicle positioning method based on tight coupling of vehicle model in enclosed environments[J]. Automotive Engineering, 2021, 43(9): 1328-1335. | |
| 9 | 刘经南,詹骄,郭迟,等. 智能高精地图数据逻辑结构与关键技术[J].测绘学报, 2019, 48(8): 939-953. |
| LIU J N, ZHAN J, GUO C, et al. Data logic structure and key tech-nologies on intelligent high-precision map[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(8): 939-953. | |
| 10 | 郑壮壮,曹万科,邹渊,等. 动态环境下无人地面车辆点云地图快速重定位方法[J].兵工学报, 2020, 41(8): 1581-1589. |
| ZHENG Z Z, CAO W K, ZOU Y, et al. Rapid localization of unmanned ground vehicles in dynamic environment using point cloud maps[J]. Acta Armamentarii, 2020, 41(8): 1581-1589. | |
| 11 | 曹立波,陈峥,颜凌波,等. 基于RFID、视觉和UWB的车辆定位系统[J].汽车工程, 2017, 39(2): 225-231. |
| CAO L B, CHEN Z, YAN L B, et al. Vehicle positioning system based on RFID,vision and UWB[J]. Automotive Engineering, 2017, 39(2): 225-231. | |
| 12 | VALGREN C, LILIENTHAL A J. SIFT,SURF & seasons: Appearance-based long-term localization in outdoor environments[J]. Robotics and Autonomous Systems, 2010, 58(2): 149-156. |
| 13 | CAI H, HU Z Z, HUANG G, et al. Integration of GPS,monocular vision, and high definition(HD) map for accurate vehicle localization[J]. Sensors, 2018, 18(10): 3270-3286. |
| 14 | CASELITZ T, STEDER B, RUHNKE M, et al. Monocular camera localization in 3D LiDAR maps[C]. EEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea(South) 2016: 1926-1931. |
| 15 | ROZENBERSZKI D, MAJDIK A L. LOL:LiDAR-Only odometry and localization in 3D point cloud maps[C]. IEEE International Conference on Robotics and Automation, Paris, France, 2020. |
| 16 | HE G, ZHANG F, LI X, et al. Robust mapping and localization in offline 3D point cloud maps[C]. IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Hefei, 2021: 765-770. |
| 17 | LI L, YANG M, WENG L, et al. Robust localization for intelligent vehicles based on pole-like features using the point cloud[J]. IEEE Transactions on Automation Science and Engineering, 2021: 1-14. |
| 18 | HATA A Y, WOLF D F. Feature detection for vehicle localization in urban environments using a multilayer LiDAR[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 420-429. |
| 19 | 瓮升霞,陈一平.基于移动激光点云的交通标志牌特征提取[J].厦门大学学报(自然科学版), 2016, 55(4): 580-585. |
| WENG S X, CHEN Y P. Road-traffic-sign detection from mobile LiDAR point clouds[J]. Journal of Xiamen University(Natural Science), 2016, 55(4): 580-585. | |
| 20 | GRAFAREND E. The optimal universal transverse mercator projec-tion[M]. Springer Berlin Heidelberg, 1995. |
| 21 | ASAM. OpenDRIVEv 1.6 formatspecification[EB/OL].[2020-1-14].https:∥www.asam.net/. |
| 22 | XU W, ZHANG F. FAST-LIO:A fast, robust lidar-inertial odometry package by tightly coupled iterated Kalman filter[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 3317-3324. |
| [1] | Nianzhong Zhang,Qiang Song,Guanfeng Wang,Mingsheng Wang. Research on Non-Current-Sensor Control of Permanent Magnet Synchronous Motor for Vehicle [J]. Automotive Engineering, 2024, 46(2): 281-289. |
| [2] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [3] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |
| [4] | Yongtao Li,Chenxu Sun,Weiguang Zheng,Enyong Xu,Yufang Li,Shanchao Wang. Collision Warning Based on Fusion of Millimeter Wave Radar and Vision [J]. Automotive Engineering, 2023, 45(9): 1666-1676. |
| [5] | Qihui Hu,Yingfeng Cai,Hai Wang,Long Chen,Zhaozhi Dong,Qingchao Liu. Heterogeneous Multi-object Trajectory Prediction Method Based on Hierarchical Graph Attention [J]. Automotive Engineering, 2023, 45(8): 1448-1456. |
| [6] | Shiju Pan, Jianshi Li, Hua Li, Jingtao Lou, Youchun Xu. Path Following Method of Intelligent Vehicles Based on Feedback Pure Tracking Method [J]. Automotive Engineering, 2023, 45(7): 1134-1144. |
| [7] | Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting [J]. Automotive Engineering, 2023, 45(7): 1174-1183. |
| [8] | Jianhua Chen,Zhongming Xu,Zhifei Zhang. Suspension State Estimation Based on Wheelbase Preview at Variable Speed [J]. Automotive Engineering, 2023, 45(6): 1040-1049. |
| [9] | Zixian Li,Shiju Pan,Yuan Zhu,Binbing He,Youchun Xu. Semi-active Suspension Control for Intelligent Vehicles Based on State Feedback and Preview Feedforward [J]. Automotive Engineering, 2023, 45(5): 735-745. |
| [10] | Shiju Pan,Yongle Li,Zixian Li,Binbing He,Yuan Zhu,Youchun Xu. Path Following Method of Intelligent Vehicles Based on Improved Pure Tracking [J]. Automotive Engineering, 2023, 45(1): 1-8. |
| [11] | Wenbo Shao,Jun Li,Yuxin Zhang,Hong Wang. Key Technologies to Ensure the Safety of the Intended Functionality for Intelligent Vehicles [J]. Automotive Engineering, 2022, 44(9): 1289-1304. |
| [12] | Zihao Wang,Yingfeng Cai,Hai Wang,Long Chen,Xiaoxia Xiong. Surrounding Multi-Target Trajectory Prediction Method Based on Monocular Visual Motion Estimation [J]. Automotive Engineering, 2022, 44(9): 1318-1326. |
| [13] | Shuxuan Sheng,Chongbo Jing,Chaoyang Jiang. Vision and Single RSU Assisted Vehicle Positioning Method [J]. Automotive Engineering, 2022, 44(7): 1009-1017. |
| [14] | Xinyu Chen,Lijun Qian,Qidong Wang. Eco-driving Control at Signalized Intersections with Consideration of Time Delay [J]. Automotive Engineering, 2022, 44(7): 960-968. |
| [15] | Jian Zhao,Dongjian Song,Bing Zhu,Hangzhe Wu,column:Han Jiayi,Yuxiang Liu. Traffic Vehicles Intention Recognition Method Driven by Data and Mechanism Hybrid [J]. Automotive Engineering, 2022, 44(7): 997-1008. |