Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2023, Vol. 45 ›› Issue (8): 1457-1467.doi: 10.19562/j.chinasae.qcgc.2023.08.016
Special Issue: 智能网联汽车技术专题-感知&HMI&测评2023年
Previous Articles Next Articles
Tao Lu1,Xin Jin2,Yifei Liao1,Shengjie Huang1,Yilin Yang1,Guotao Xie1,2,Xiaohui Qin1,3( )
)
Received:2022-12-08
Revised:2023-02-28
Online:2023-08-25
Published:2023-08-17
Contact:
Xiaohui Qin
E-mail:qxh880507@163.com
Tao Lu,Xin Jin,Yifei Liao,Shengjie Huang,Yilin Yang,Guotao Xie,Xiaohui Qin. Visual SLAM Based on Jacobian Null-space Marginalization[J].Automotive Engineering, 2023, 45(8): 1457-1467.

"

"

"
"
"

"
"
| 数据集 | g2o (SM) | Ours-double(NM) | Ours-float(NM) | ORB-SLAM3 | ||||
|---|---|---|---|---|---|---|---|---|
| mean | RMSE | mean | RMSE | mean | RMSE | mean | RMSE | |
| 00 | 7.580 | 9.387 | 5.734(24% | 6.335(32% | 6.188(18% | 7.208(23% | 7.513(1% | 9.879(5% |
| 02 | 19.570 | 26.900 | 19.30(1% | 25.47(5% | 19.77(1% | 27.20(1% | 21.02(7% | 26.43(2% |
| 03 | 1.384 | 1.552 | 0.556(59% | 0.818(47% | 1.009(27% | 1.164(25% | 1.378(1% | 1.613(3% |
| 04 | 1.592 | 1.865 | 0.700(56% | 0.841(54% | 1.423(10% | 1.635(12% | 1.086(31% | 1.279(31% |
| 05 | 6.830 | 7.361 | 4.530(33% | 4.840(34% | 4.665(31% | 4.979(32% | 6.915(1% | 7.708(5% |
| 06 | 15.230 | 17.470 | 10.68(29% | 12.51(28% | 13.10(14% | 15.00(14% | 15.84(4% | 18.54(6% |
| 07 | 3.955 | 4.501 | 3.799(4% | 4.220(6% | 4.200(6% | 4.632(2% | 3.516(11% | 3.872(14% |
| 09 | 8.017 | 9.170 | 7.330(8% | 8.010(12% | 8.360(4% | 9.457(3% | 9.090(13% | 10.33(13% |
| 10 | 8.070 | 9.390 | 6.605(18% | 7.724(17% | 7.725(4% | 8.917(5% | 9.835(21% | 11.32(20% |
| 实车 | 3.557 | 3.902 | 2.454(31% | 2.782(26% | 3.673(3% | 4.075(4% | 4.425(24% | 4.961(27% |
"
| 数据集 | g2o-baseline | Ours-double | Ours-float |
|---|---|---|---|
| 00 | 89 | 85(4% | 75(15% |
| 02 | 76 | 69(9% | 58(23% |
| 03 | 108 | 99(8% | 82(24% |
| 04 | 92 | 86(6% | 77(16% |
| 05 | 93 | 91(2% | 80(13% |
| 06 | 85 | 77(9% | 73(25% |
| 07 | 95 | 89(6% | 82(13% |
| 09 | 80 | 73(9% | 62(23% |
| 10 | 81 | 78(3% | 74(9% |
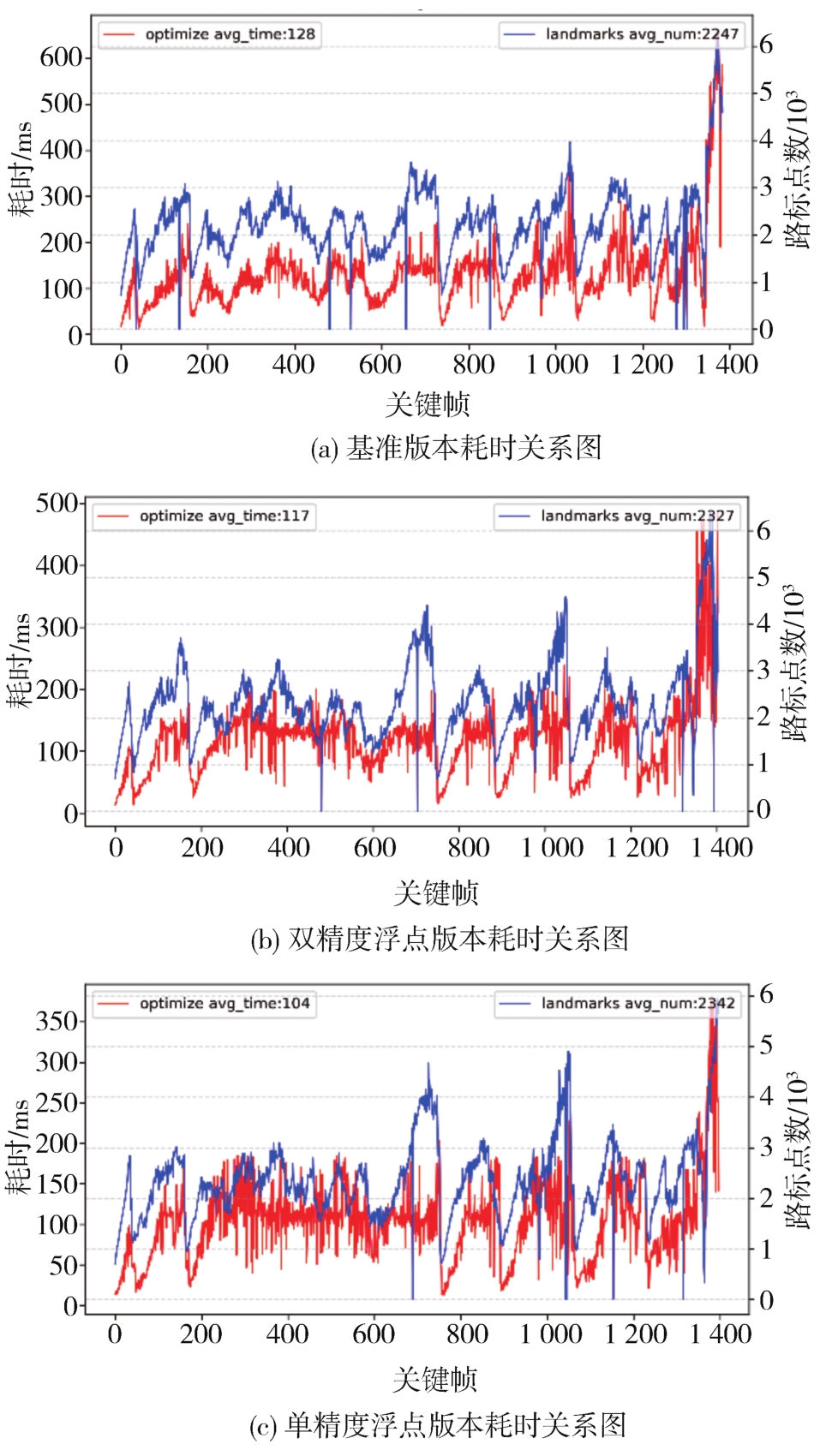
| 实车 | 128 | 117(9% | 104(19% |
"
"

"

"
"
| 1 | 王金强,黄航,郅朋,等.自动驾驶发展与关键技术综述[J].电子技术应用,2019,45(6):28-36.DOI:10.16157/j. issn.0258-7998.199062. |
| WANG Jinqiang, HUANG Hang, ZHI Peng, et al. Overview of autonomous driving development and key technologies [J]. Electronic Technology Application, 2019, 45 (6): 28-36. DOI: 10.16157/j. issn.0258-7998.199062. | |
| 2 | 秦晓辉,王哲文,庞涛,等.基于车辆模型紧耦合的封闭园区车辆定位方法[J].汽车工程,2021,43(9):1328-1335.DOI:10.19562/j.chinasae.qcgc.2021.09.009. |
| QIN Xiaohui, WANG Zhewen, PANG Tao,et al. Vehicle positioning method for closed parks based on tight coupling of vehicle models [J]. Automotive Engineering, 2021,43 (9): 1328-1335. DOI: 10.19562/j.chinasae.qcgc.2021.09.009. | |
| 3 | CADENA C, CARLONE L, CARRILLO H, et al. Past, present, and future of simultaneous localization and mapping: toward the robust-perception age[J]. IEEE Transactions on Robotics, 2016, 32(6): 1309-1332. |
| 4 | MACARIO BARROS A, MICHEL M, MOLINE Y, et al. A comprehensive survey of visual slam algorithms[J]. Robotics, 2022, 11(1): 24. |
| 5 | PIRE T, FISCHER T, CASTRO G, et al. S-PTAM: stereo parallel tracking and mapping[J]. Robotics and Autonomous Systems, 2017, 93: 27-42. |
| 6 | 黄圣杰,胡满江,周云水,等.动态场景下基于语义分割与运动一致性约束的车辆视觉SLAM[J].汽车工程,2022,44(10):1503-1510.DOI:10.19562/j.chinasae.qcgc.2022.10.004. |
| HUANG Shengjie, HU Manjiang, ZHOU Yunshui,et al. Vehicle vision SLAM based on semantic segmentation and motion consistency constraint in dynamic scenes [J]. Automotive Engineering, 2022,44 (10): 1503-1510. DOI: 10.19562/j.chinasae.qc gc.2022.10.004. | |
| 7 | HUANG G P, MOURIKIS A I, ROUMELIOTIS S I. Analysis and improvement of the consistency of extended Kalman filter based SLAM[C].2008 IEEE International Conference on Robotics and Automation. IEEE, 2008: 473-479. |
| 8 | MOURIKIS A I, ROUMELIOTIS S I. A multi-state constraint Kalman filter for vision-aided inertial navigation[C].ICRA. 2007, 2: 6. |
| 9 | MUR-ARTAL R, MONTIEL J M M, TARDOS J D. ORB-SLAM: a versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163. |
| 10 | SIBLEY G, MATTHIES L, SUKHATME G. Sliding window filter with application to planetary landing[J]. Journal of Field Robotics, 2010, 27(5): 587-608. |
| 11 | MCCORD T B, SOTIN C. Ceres: evolution and current state[J]. Journal of Geophysical Research: Planets, 2005, 110(E5). |
| 12 | GRISETTI G, KÜMMERLE R, STRASDAT H, et al. g2o: a general framework for (hyper) graph optimization[C].Proceedings of the IEEE international conference on robotics and automation (ICRA), Shanghai, China. 2011: 9-13. |
| 13 | DEMMEL N, SOMMER C, CREMERS D, et al. Square root bundle adjustment for large-scale reconstruction[C].Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2021: 11723-11732. |
| 14 | LIU H, CHEN M, ZHANG G, et al. Ice-ba: incremental, consistent and efficient bundle adjustment for visual-inertial slam[C].Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2018: 1974-1982. |
| 15 | REN J, LIANG W, YAN R, et al. MegBA: A GPU-based distributed library for large-scale bundle adjustment[C].European Conference on Computer Vision. Springer, Cham, 2022: 715-731. |
| 16 | DEMMEL N, SCHUBERT D, SOMMER C, et al. Square root marginalization for sliding-window bundle adjustment[C].Proceedings of the IEEE/CVF International Conference on Computer Vision. 2021: 13260-13268. |
| 17 | 蔡英凤,陆子恒,李祎承,等.基于多传感器融合的紧耦合SLAM系统[J].汽车工程,2022,44(3):350-361.DOI:10.1956 2/j.chinasae.qcgc.2022.03.006. |
| CAI Yingfeng, LU Ziheng, LI Yicheng, et al. Tight coupling SLAM system based on multi-sensor fusion [J]. Automotive Engineering, 2022,44 (3): 350-361. DOI: 10.1956 2/j.chinasae.qcgc.2022.03.006. | |
| 18 | GENEVA P, ECKENHOFF K, LEE W, et al. Openvins: a research platform for visual-inertial estimation[C].2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020: 4666-4672. |
| 19 | GEIGER A, LENZ P, STILLER C, et al. Vision meets robotics: the KITTI dataset[J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| 20 | GONG X, LV Y, XU X, et al. Pose estimation of omnidirectional camera with improved EPnP algorithm[J]. Sensors, 2021, 21(12): 4008. |
| 21 | ARSHAD S, KIM G W. Role of deep learning in loop closure detection for visual and lidar SLAM: a survey[J]. Sensors, 2021, 21(4): 1243. |
| 22 | MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. |
| 23 | TRANSTRUM M K, SETHNA J P. Improvements to the levenberg-marquardt algorithm for nonlinear least-squares minimization[J]. arXiv preprint arXiv:, 2012. |
| 24 | USENKO V, DEMMEL N, SCHUBERT D, et al. Visual-inertial mapping with non-linear factor recovery[J]. IEEE Robotics and Automation Letters, 2019, 5(2): 422-429. |
| [1] | Feng Gao,Defu Feng,Qiuxia Hu. Accelerating Technologies of Numerical Optimization for Motion Planning Designed by Nonlinear Model Predictive Control [J]. Automotive Engineering, 2023, 45(8): 1438-1447. |
| [2] | Wenguang Wu,Shuangyue Tian,Zhiyong Zhang,Bin Zhang. Research on Semantic Segmentation of Uneven Features of Unpaved Road [J]. Automotive Engineering, 2023, 45(8): 1468-1478. |
| [3] | Manjiang Hu,Binjie Mou,Zeyu Yang,Yougang Bian,Xiaohui Qin,Biao Xu. A Hybrid A* Path Planning Method Based on DBSCAN and Dichotomy [J]. Automotive Engineering, 2023, 45(3): 341-349. |
| [4] | Jie Hu,Haoyan Liu,Minchao Zhang,Zhihao Zhang,Qi Zhu,Ruipeng Chen,Man Luo. Research on the Decision and Planning System of Automated Valet Parking Based on Finite State Machine [J]. Automotive Engineering, 2023, 45(2): 243-252. |
| [5] | Liang Chu,Cheng Chang,Xu Wang,Di Zhao,Yanwu Xu. Research on Brake-by-Wire System and Pressure Control Algorithm for Advanced Automatic Driving [J]. Automotive Engineering, 2022, 44(3): 308-318. |
| [6] | Zilong Liu,Xiangfei Shen. Small Target Detection Method for Dual-Modal Autonomous Driving with Yolo v5 and Lite-HRNet Fusion [J]. Automotive Engineering, 2022, 44(10): 1511-1520. |
| [7] | Linyan Wang,Huijun Zhang,Hongyu Hu. Effect of Driving Experience on Take-Over Performance of L3 Automatic Driving [J]. Automotive Engineering, 2022, 44(10): 1521-1526. |
| [8] | Xiaohui Qin,Zhewen Wang,Tao Pang,Weiqing Shi,Ning Sun,Manjiang Hu. Vehicle Positioning Method Based on Tight Coupling of Vehicle Model in Enclosed Environments [J]. Automotive Engineering, 2021, 43(9): 1328-1335. |
|