Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (11): 2005-2016.doi: 10.19562/j.chinasae.qcgc.2024.11.007
Previous Articles Next Articles
Zhongjie Liu,Zhiguo Zhao( ),Qin Yu
),Qin Yu
Received:2024-03-30
Revised:2024-06-03
Online:2024-11-25
Published:2024-11-22
Contact:
Zhiguo Zhao
E-mail:zhiguozhao@tongji.edu.cn
Zhongjie Liu,Zhiguo Zhao,Qin Yu. Vehicle Assisted Driving Behavior Decision-Making Based on Dynamic Risk Assessment[J].Automotive Engineering, 2024, 46(11): 2005-2016.
"


"

"

"


"
"

"
| 风险评估指标 | 均值 | 标准差 | 离散系数 |
|---|---|---|---|
| 1.831 2 | 1.154 3 | 0.630 4 | |
| 0.487 9 | 1.390 1 | 2.849 0 | |
| 4.555 8 | 4.861 3 | 1.067 1 | |
| 0.457 5 | 0.904 3 | 1.976 8 |
"
驾驶片段 类型 | 风险作用强度聚类中心 | 风险作用强度标准差 | 换道轨迹 数量 |
|---|---|---|---|
| 保守型 | 0.746 0 | 0.386 2 | 5 385 |
| 平衡型 | 2.146 1 | 0.392 2 | 4 805 |
| 激进型 | 3.535 4 | 0.693 6 | 2 541 |

"

"
驾驶片段 类型 | 均值 | 标准差 | 显著性检验p<0.01 | ||
|---|---|---|---|---|---|
| 保守型 | 平衡型 | 激进型 | |||
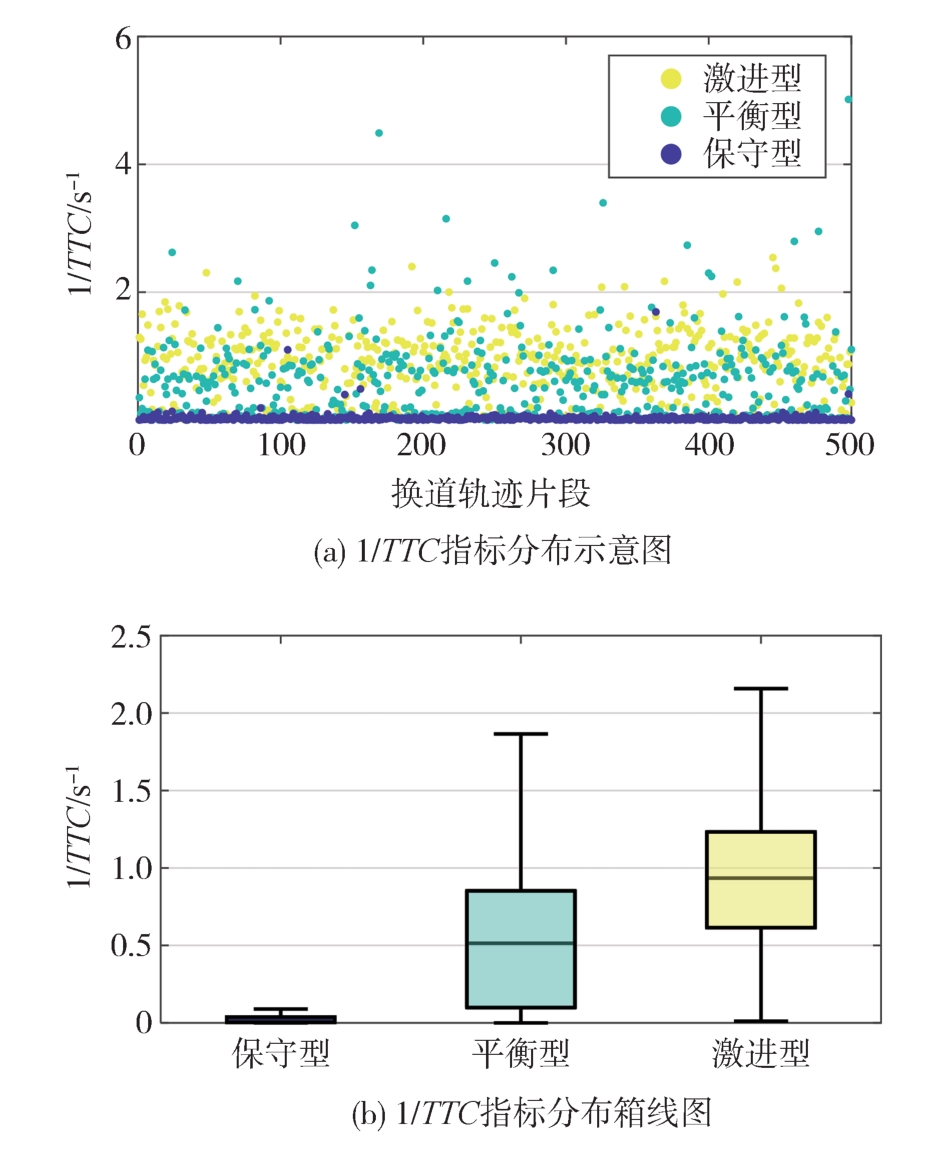
| 保守型 | 0.071 5 | 0.694 9 | 1 | ||
| 平衡型 | 0.660 1 | 0.873 4 | 8.79e-127 | 1 | |
| 激进型 | 0.976 8 | 0.643 1 | 5.99e-156 | 1.66e-30 | 1 |
"
驾驶片段 类型 | 均值 | 标准差 | 显著性检验p<0.01 | ||
|---|---|---|---|---|---|
| 保守型 | 平衡型 | 激进型 | |||
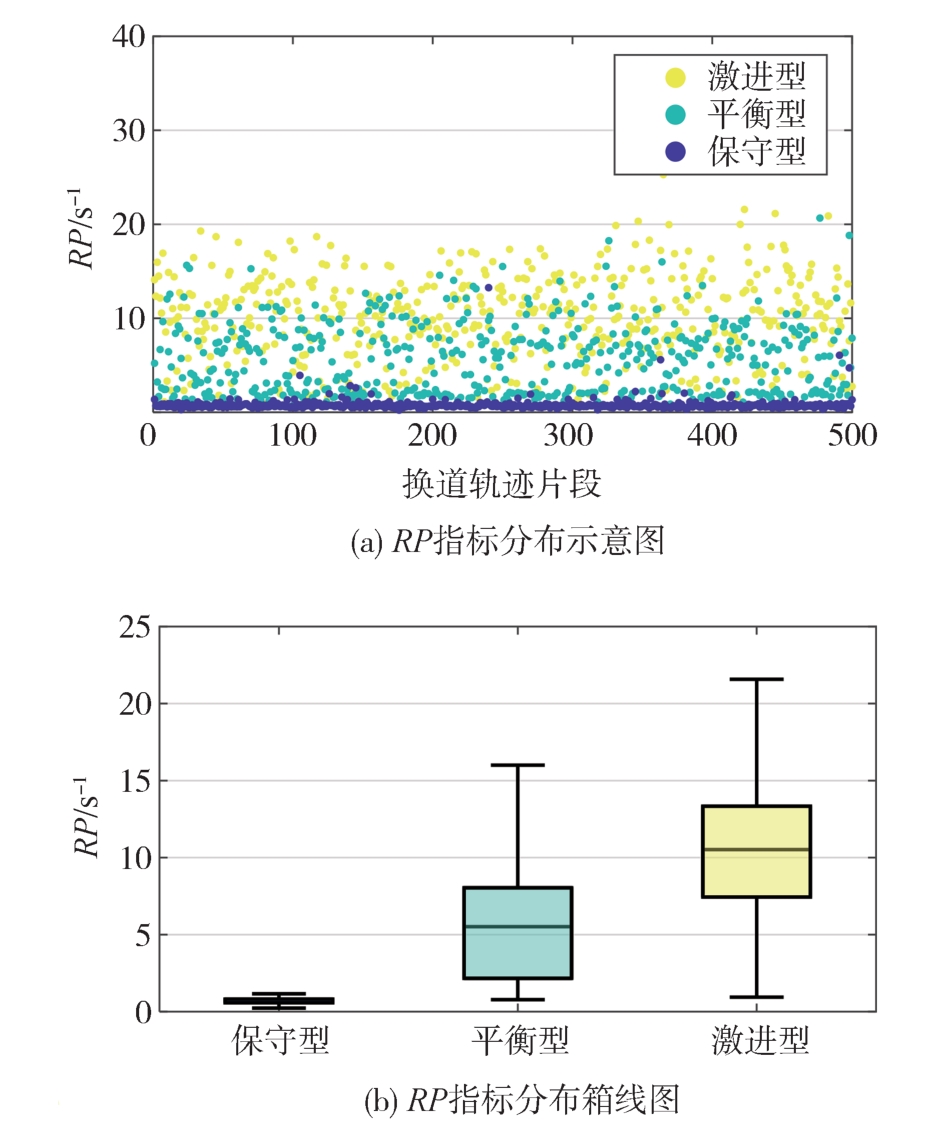
| 保守型 | 0.834 4 | 0.857 2 | 1 | ||
| 平衡型 | 5.724 3 | 3.831 0 | 3.16e-155 | 1 | |
| 激进型 | 10.535 6 | 4.625 7 | 3.59e-162 | 7.95e-60 | 1 |
"
驾驶片段 类型 | 均值 | 标准差 | 显著性检验p<0.01 | ||
|---|---|---|---|---|---|
| 保守型 | 平衡型 | 激进型 | |||
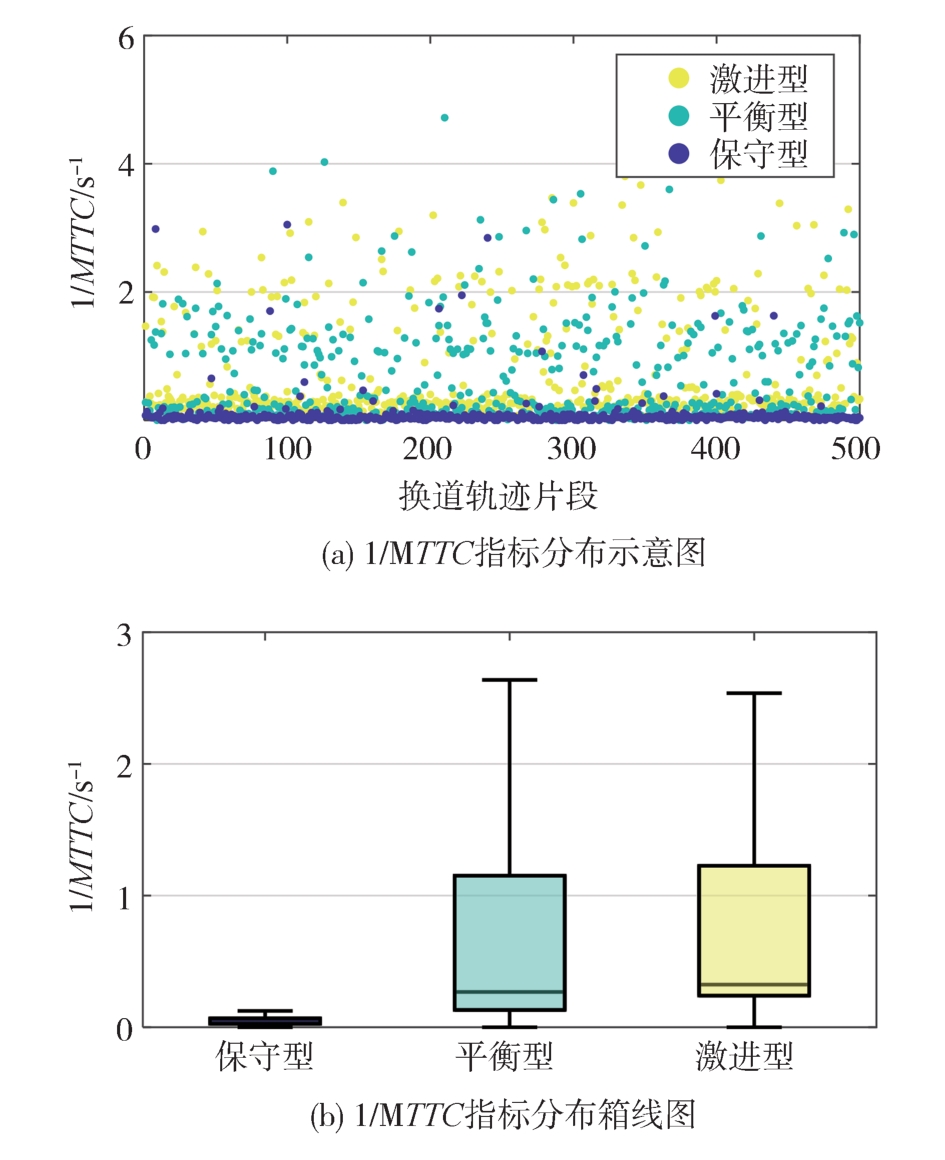
| 保守型 | 0.081 9 | 0.273 4 | 1 | ||
| 平衡型 | 0.747 1 | 1.135 4 | 4.41e-120 | 1 | |
| 激进型 | 0.798 0 | 0.903 0 | 6.02e-146 | 1.54e-06 | 1 |

"

"

"

"

"


"

"


"
"


"

| 1 | 董汉, 舒伟, 陈超, 等. 危险驾驶工况场景的复杂度评估方法研究[J]. 汽车工程, 2020, 42(6): 808-814. |
| DONG H, SHU W, CHEN C, et al. Research on the complexity evaluation method of dangerous driving scenario conditions[J]. Automotive Engineering, 2020, 42(6): 808-814. | |
| 2 | DENG H F, ZHAO Y Q, WANG Q W, et al. Deep reinforcement learning based decision-making strategy of autonomous vehicle in highway uncertain driving environments[J]. Automotive Innovation, 2023, 6(3): 438-452. |
| 3 | MAHMUD S M S, FERREIRA L, HOQUE M S, et al. Application of proximal surrogate indicators for safety evaluation: a review of recent developments and research needs[J]. IATSS Research, 2017, 41(4): 153-163. |
| 4 | 王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1): 105-114. |
| WANG J Q, WU J, LI Y. Concept, principle and modeling of driving risk field based on driver-vehicle-road interaction[J]. China Journal of Highway and Transport, 2016, 29(1): 105-114. | |
| 5 | LI L H, GAN J, JI X K, et al. Dynamic driving risk potential field model under the connected and automated vehicles environment and its application in car-following modeling[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(1): 122-141. |
| 6 | 王明强, 王震坡, 张雷. 基于碰撞风险评估的智能汽车局部路径规划方法研究[J]. 机械工程学报, 2021, 57(10): 28-41. |
| WANG M Q, WANG Z P, ZHANG L. Local path planning for intelligent vehicles based on collision risk evaluation[J]. Journal of Mechanical Engineering, 2021, 57(10): 28-41. | |
| 7 | 田野, 裴华鑫, 晏松, 等. 车路协同环境下行车风险场模型的扩展与应用[J]. 清华大学学报(自然科学版), 2022, 62(3): 447-457. |
| TIAN Y, PEI H X, YAN S, et al. Extended driving risk field model for i-VICS and its application[J]. Journal of Tsinghua University (Science and Technology), 2022, 62(3): 447-457. | |
| 8 | LEE K, KUM D. Collision avoidance/mitigation system: motion planning of autonomous vehicle via predictive occupancy map[J]. IEEE Access, 2019, 7: 52846-52857. |
| 9 | LIU X L, WANG Y F, JIANG K, et al. Interactive trajectory prediction using a driving risk map-integrated deep learning method for surrounding vehicles on highways[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 19076-19087. |
| 10 | SAE International, On-Road Automated Driving (ORAD) Committee. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles: SAE J3016_202104[S/OL]. [2023-03-10]. https://www.sae.org/standards/content/j3016_202104/. |
| 11 | 冀杰, 黄岩军, 李云伍, 等. 基于有限状态机的车辆自动驾驶行为决策分析[J]. 汽车技术, 2018(12): 1-7. |
| JI J, HUANG Y J, LI Y W, et al. Decision-making analysis of autonomous driving behaviors for intelligent vehicles based on finite state machine[J]. Automobile Technology, 2018(12): 1-7. | |
| 12 | 陈慧, 王洁新. 基于驾驶人不满度的高速公路自动驾驶换道决策[J]. 中国公路学报, 2019, 32(12): 1-9. |
| CHEN H, WANG J X. A decision-making method for lane changes of automated vehicles on freeways based on drivers’ dissatisfaction[J]. China Journal of Highway and Transport, 2019, 32(12): 1-9. | |
| 13 | HE X C, LV C. Towards safe autonomous driving: decision making with observation-robust reinforcement learning[J]. Automotive Innovation, 2023, 6(4): 509-520. |
| 14 | LIU Y G, WANG X, LI L, et al. A novel lane change decision-making model of autonomous vehicle based on support vector machine[J]. IEEE Access, 2019, 7: 26543-26550. |
| 15 | LI G F, YANG L, LI S, et al. Human-like decision making of artificial drivers in intelligent transportation systems: an end-to-end driving behavior prediction approach[J]. IEEE Intelligent Transportation Systems Magazine, 2022, 14(6): 188-205. |
| 16 | 何仁, 赵晓聪, 王建强. 人-车-路交互下的驾驶人风险响应度建模[J]. 中国公路学报, 2020, 33(9): 236-250. |
| HE R, ZHAO X C, WANG J Q. Modeling of driving risk response under human-vehicle-road interaction[J]. China Journal of Highway and Transport, 2020, 33(9): 236-250. | |
| 17 | WOLF M T, BURDICK J W. Artificial potential functions for highway driving with collision avoidance[C]. International Conference on Robotics and Automation (ICRA), 2008: 3731-3736. |
| 18 | KIM J, KUM D. Collision risk assessment algorithm via lane-based probabilistic motion prediction of surrounding vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(9): 2965-2976. |
| 19 | KRAJEWSKI R, BOCK J, KLOEKER L, et al. The highD dataset: a drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems[C]. International Conference on Intelligent Transportation Systems (ITSC), 2018: 2118-2125. |
| 20 | 季学武, 费聪, 何祥坤, 等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32(6): 34-42. |
| JI X W, FEI C, HE X K, et al. Intention recognition and trajectory prediction for vehicles using LSTM network[J]. China Journal of Highway and Transport, 2019, 32(6):34-42. | |
| 21 | JIAO Y R, CALVERT S C, VAN LINT H, et al. Identifying vehicle interaction at urban intersections: a comparison of proximity resistance, time-to-collision, and post-encroachment-time[C]. International Conference on Intelligent Transportation Systems (ITSC), 2023: 973-978. |
| 22 | KONDOH T, YAMAMURA T, KITAZAKI S, et al. Identification of visual cues and quantification of drivers' perception of proximity risk to the lead vehicle in car-following situations[J]. Journal of Mechanical Systems for Transportation and Logistics, 2008, 1(2): 170-180. |
| 23 | YANG J Y, LEE J, MAO S, et al. Dynamic safety estimation of airport pick-up area based on video trajectory data[J]. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(2): 1774-1786. |
| 24 | JULA H, KOSMATOPOULOS E B, IOANNOU P A. Collision avoidance analysis for lane changing and merging[J]. IEEE Transactions on Vehicular Technology, 2000, 49(6): 2295-2308. |
| 25 | SHALEV-SHWARTZ S, SHAMMAH S, SHASHUA A. On a formal model of safe and scalable self-driving cars[EB/OL]. (2017-08-21). arXiv:1708.06374[2024-05-29]. Available from: https://arxiv.org/abs/1708.06374. |
| [1] | Xianghao Meng,Ling Niu,Junqiang Xi,Danni Chen,Chao Lü. Risk Prediction of Heterogeneous Traffic Participants Based on Spatio-Temporal Graph Neural Networks [J]. Automotive Engineering, 2024, 46(9): 1537-1545. |
| [2] | Xiujian Yang,Yongrui Bai. Trajectory Planning for Intelligent Vehicle in Dynamic Unstructured Environment Based on the Graph Search and Optimization Methods [J]. Automotive Engineering, 2024, 46(9): 1564-1575. |
| [3] | Jing Zhao,Hao Liang,Tianxiao Xu,Yayue Xiao,Bowen Jiang. Research on Domain Specific Modeling Language for Intelligent Vehicle Cyber-Physical System [J]. Automotive Engineering, 2024, 46(8): 1370-1381. |
| [4] | Jialiang Zhu,Qiaobin Liu,Fan Yang,Lu Yang,Weihua Li. Two-Dimensional Collision Risk Prediction for Intelligent Vehicles Considering the Influence of Heterogeneous Vehicle Types [J]. Automotive Engineering, 2024, 46(8): 1414-1421. |
| [5] | Xiaolin Fan,Xudong Zhang,Yuan Zou,Xin Yin,Yingqun Liu. A Mapping and Planning Method Based on Simplified Visibility Graph [J]. Automotive Engineering, 2024, 46(7): 1249-1258. |
| [6] | Chao Yang,Fan Yang,Weida Wang,Tianqi Qie,Yansong Wang,Hongwei Wang. Risk Avoidance Decision Planning for Intelligent Driving Vehicles Based on Spatiotemporal Risk [J]. Automotive Engineering, 2024, 46(6): 975-984. |
| [7] | Shuen Zhao,Sheng Wang,Yao Leng. Multi-objective Explicit Model Predictive Control for Intelligent Vehicle Trajectory Tracking [J]. Automotive Engineering, 2024, 46(5): 784-794. |
| [8] | Bing Zhu,Yinzi Huang,Jian Zhao,Peixing Zhang,Jingwei Xue. A Criticality Assessment Model for the Intelligent Vehicle Test Scenario Based on the Onboard Camera Images [J]. Automotive Engineering, 2024, 46(4): 557-563. |
| [9] | Ting Chikit,Yafei Wang,Yichen Zhang,Mingyu Wu,Yile Wang. Energy-Saving Planning Method for Autonomous Driving Mining Trucks Based on Composite Dynamic Sampling [J]. Automotive Engineering, 2024, 46(4): 588-595. |
| [10] | Hongmao Qin,Shu Jiang,Tiantian Zhang,Heping Xie,Yougang Bian,Yang Li. Path Tracking Control of Intelligent Vehicle Based on Learning Model Predictive Control [J]. Automotive Engineering, 2024, 46(10): 1804-1815. |
| [11] | Zhong Zhang,Xiaojian Wu,Huihua Jiang,Chao Zhang,Yukang Wan. Model Predictive Anti-disturbance Control for Longitudinal Motion of Intelligent Vehicles Under Multi-source Disturbances [J]. Automotive Engineering, 2024, 46(10): 1816-1828. |
| [12] | Junhui Zhang,Xiaoman Guo,Yuxi Liu,Mingqiang Zheng,Yuhan Qian,Yuxuan Ding. Driver-Automation Shared Lane-Keeping Robust Control [J]. Automotive Engineering, 2024, 46(10): 1853-1862. |
| [13] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [14] | Jianping Hao,Yanzhao Su,Zhihua Zhong,Jin Huang. Service-Oriented Architecture and Service Scheduling Mechanism for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(9): 1563-1572. |
| [15] | Gaoshi Zhao,Long Chen,Yingfeng Cai,Yubo Lian,Hai Wang,Qingchao Liu,Chenglong Teng. Trajectory Prediction Technology Integrating Complex Network and Memory-Augmented Network [J]. Automotive Engineering, 2023, 45(9): 1608-1616. |