Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2024, Vol. 46 ›› Issue (6): 995-1005.doi: 10.19562/j.chinasae.qcgc.2024.06.006
Previous Articles Next Articles
Juan Zeng1,2,Hao Wang1,Bo Xu1,Hongchang Zhang1,2( )
)
Received:2023-12-21
Revised:2024-02-22
Online:2024-06-25
Published:2024-06-19
Contact:
Hongchang Zhang
E-mail:zhc112@126.com
Juan Zeng,Hao Wang,Bo Xu,Hongchang Zhang. Research on the Driver's Hazard Perception State Recognition Model Based on Strength and Weakness Perception Design[J].Automotive Engineering, 2024, 46(6): 995-1005.

"


"

"
| 场景 | 干扰场景描述 |
|---|---|
| 场景1 | 被试车辆行驶在高速公路,后方车辆左侧正常距离安全超车 |
| 场景2 | 被试车辆出匝道驶入公路,两只动物静止在最右侧道路 |
| 场景3 | 被试车辆行驶在公路,前方发生车祸,车辆和行人静止在最右侧车道 |
| 场景4 | 被试车辆途经十字路口,直行为绿灯,路边行人静止在路侧 |
| 场景5 | 被试车辆途经十字路口,直行为绿灯,摩托车静止在十字路口右侧道路 |
"
| 场景 | 显性危险场景 | 场景 | 隐性危险场景 |
|---|---|---|---|
场景1: 被试车辆行驶在高速公路,后方车辆在超过被试车辆3 m时左侧近距离超车。 | 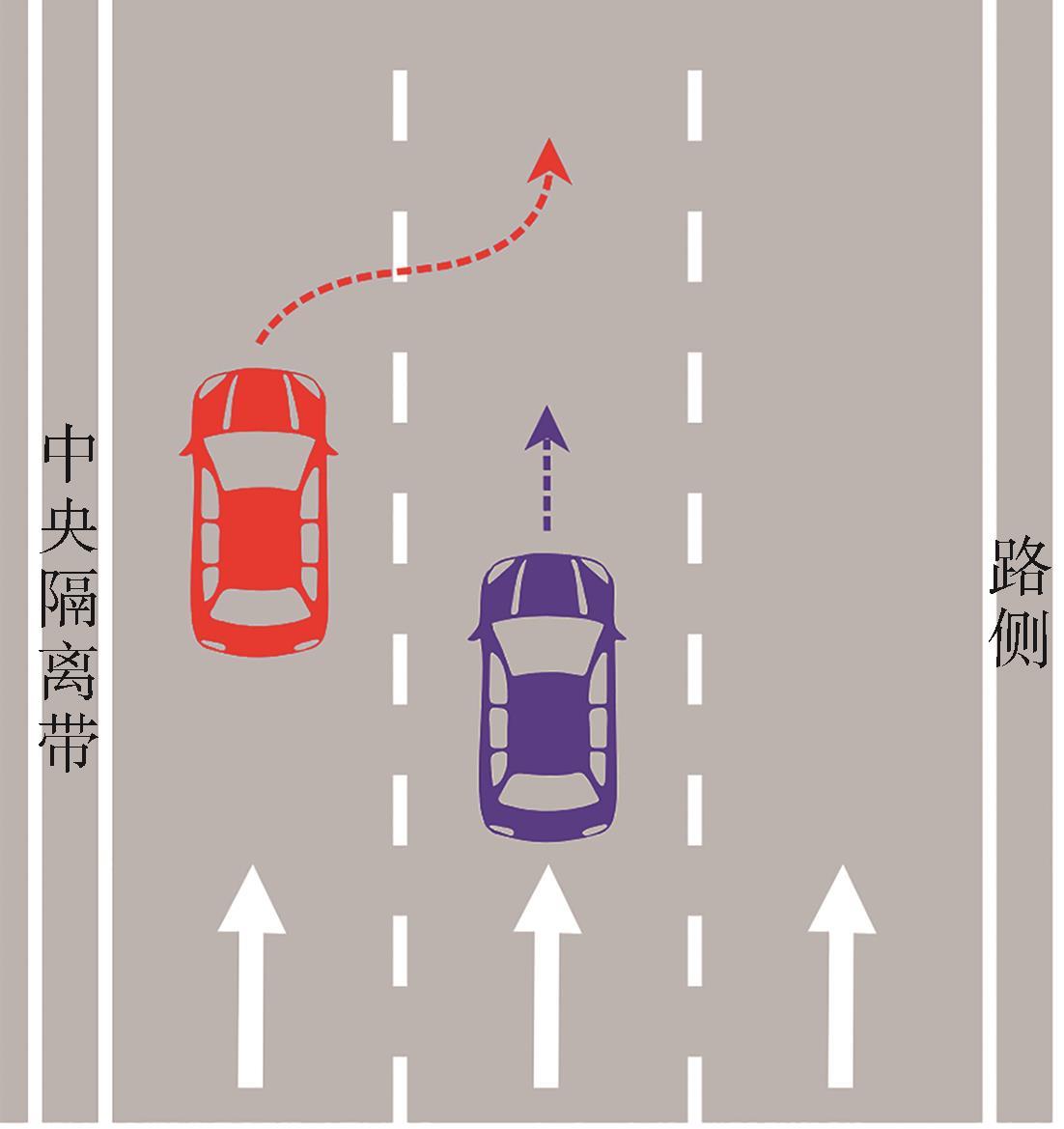 | 场景2: 被试车辆行驶在高速公路,后方车辆在超过被试车辆3 m时右侧近距离超车。 | 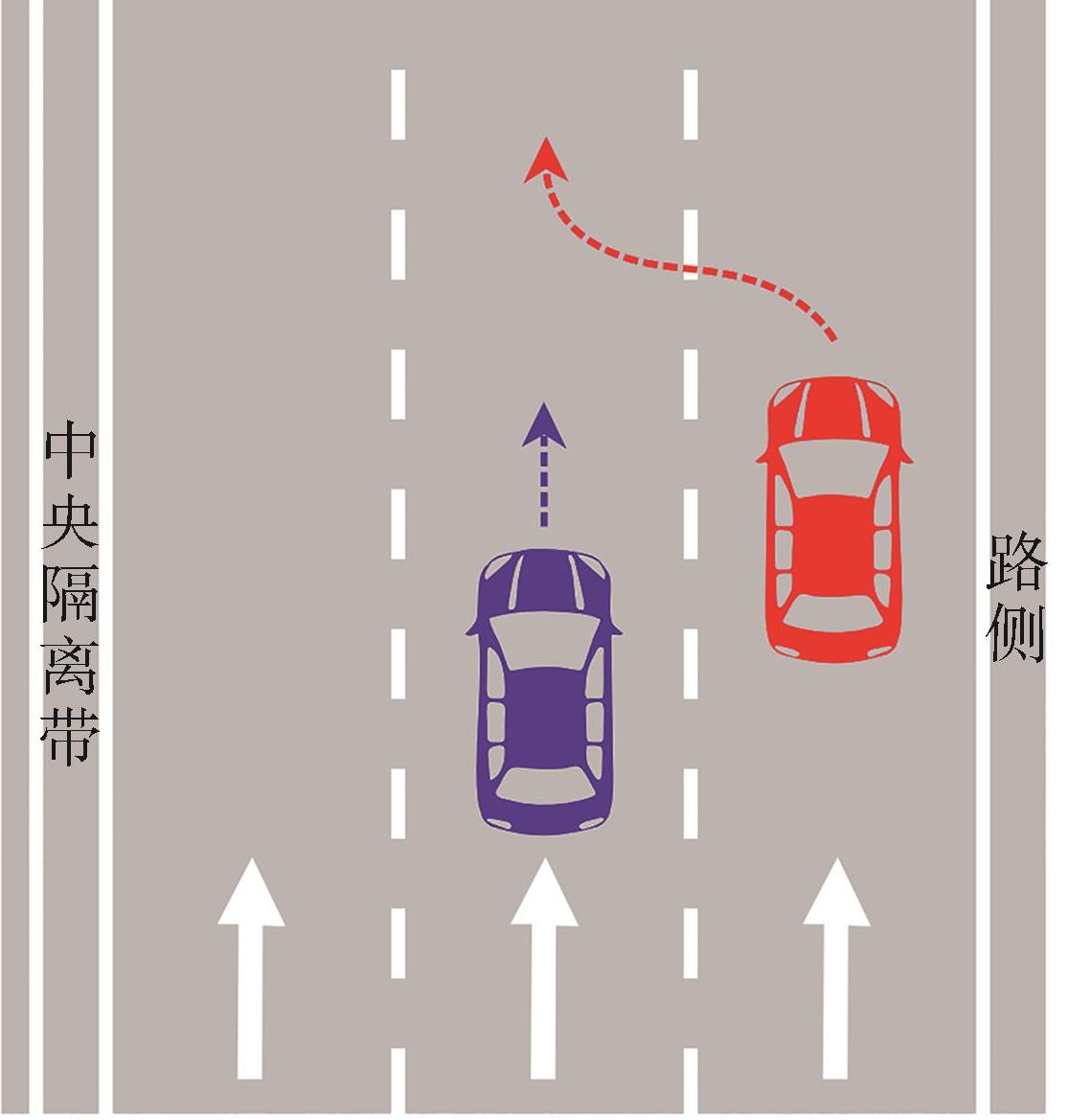 |
场景3: 被试车辆行驶在公路,同向行驶的摩托车在施工区域前左转插入被试车辆行驶的车道。 |  | 场景4: 被试车辆行驶在公路,行人(受静止的客车遮挡)突然横穿至被试车辆行驶的车道。 | 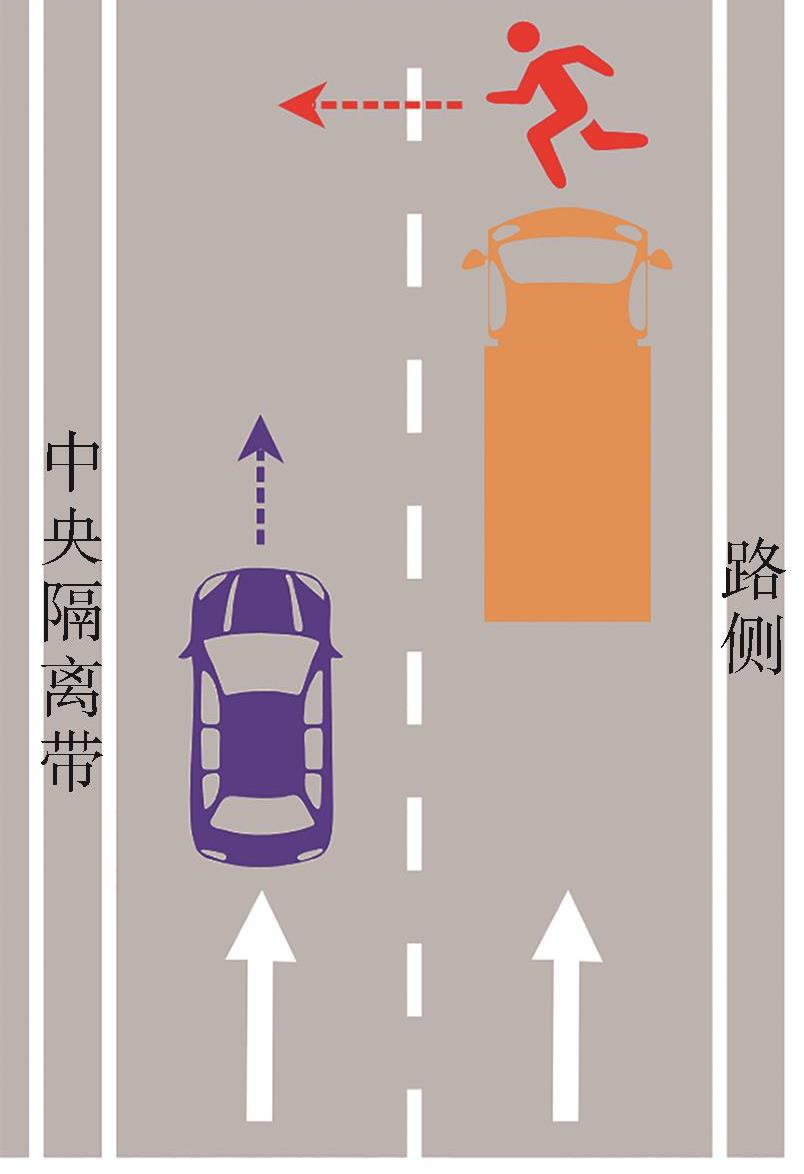 |
场景5: 被试车辆途经十字路口,直行为绿灯,路边行人突然横穿至被试车辆行驶的车道。 | 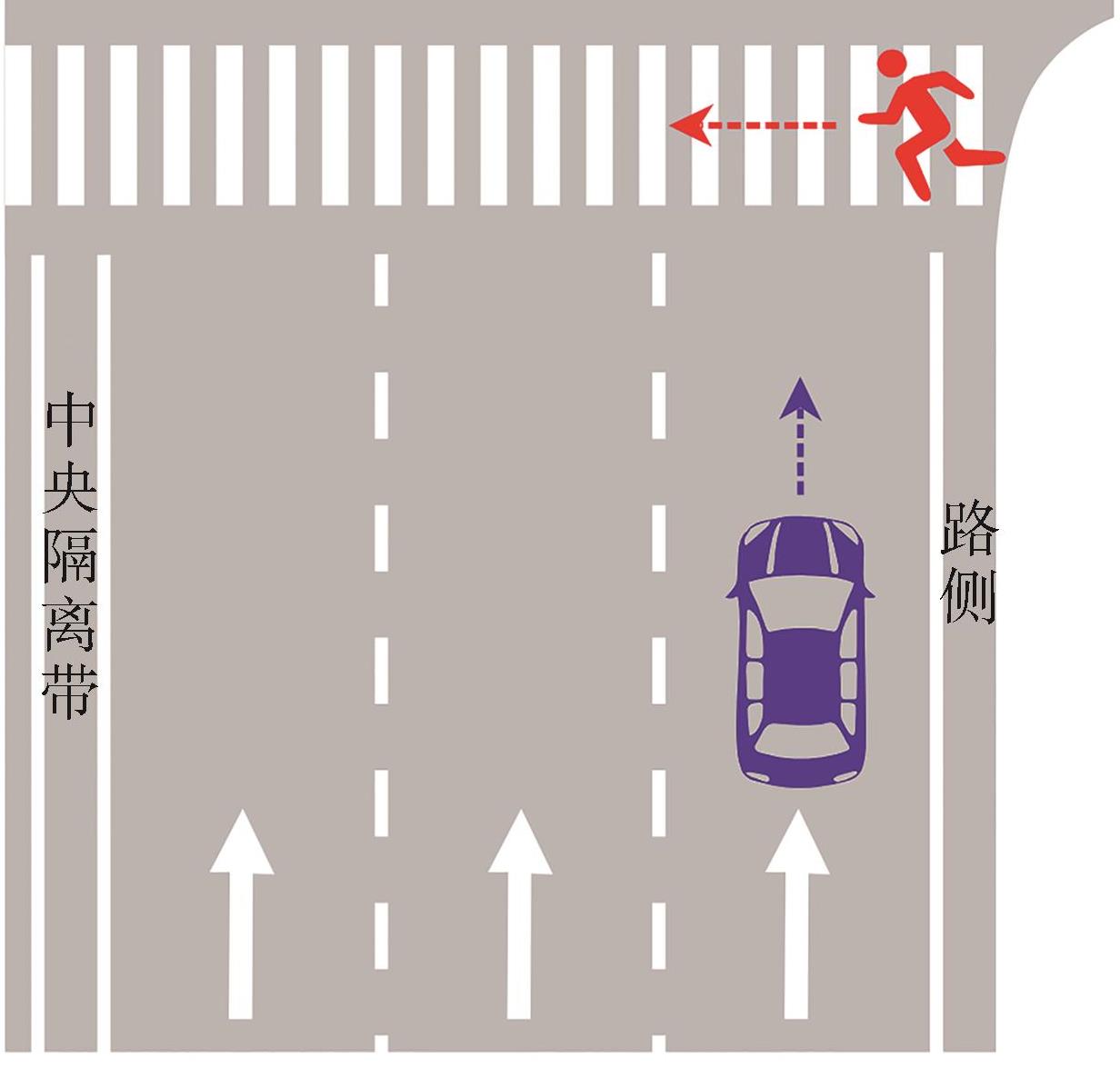 | 场景6: 被试车辆途经十字路口,直行为绿灯,在十字路口右边一摩托车(受客车遮挡)右转,与被试车辆冲突。 |  |
"
| 指标描述 | 单位 | 弱危险感知状态 | 强危险感知状态 | 正态p | 显著p | ||
|---|---|---|---|---|---|---|---|
| M | SD | M | SD | ||||
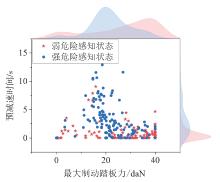
| 最大制动踏板力 | daN | 26.925 | 13.414 | 22.217 | 8.273 | 0.004* | 0.000* |
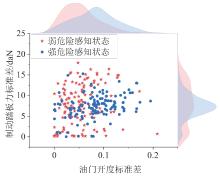
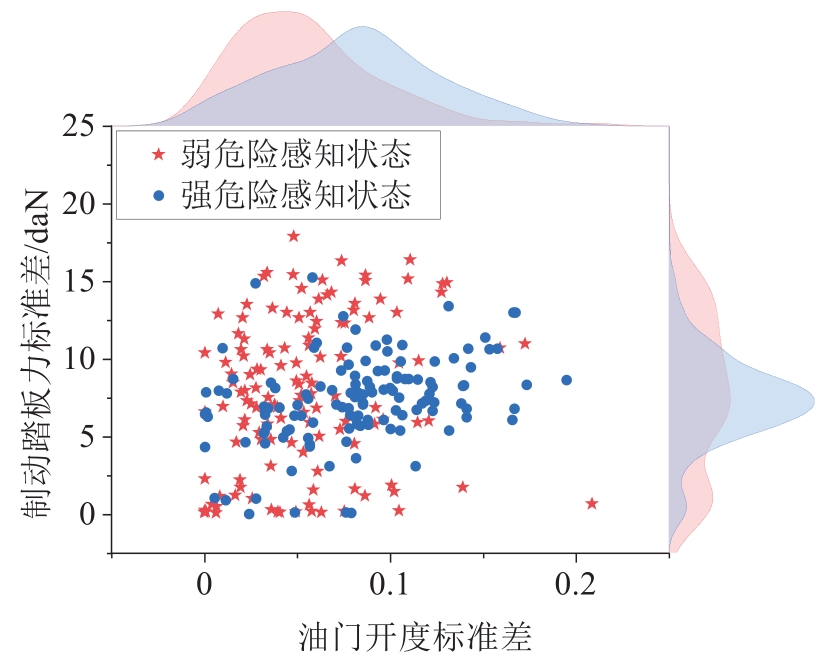
| 制动踏板力标准差 | daN | 7.851 | 4.941 | 7.417 | 2.843 | 0.094 | 0.353 |
| 油门开度标准差 | 0.055 | 0.038 | 0.081 | 0.043 | 0.113 | 0.000* | |
| 转向盘转角标准差 | (°)/s | 1.990 | 7.053 | 1.672 | 3.698 | 0.000* | 0.577 |
| 预减速时间 | s | 0.800 | 1.468 | 3.226 | 3.157 | 0.000* | 0.000* |
| 车头时距 | s | 0.837 | 1.567 | 3.566 | 2.170 | 0.000* | 0.000* |
| 车速均值 | m/s | 16.331 | 3.778 | 12.657 | 2.749 | 0.463 | 0.000* |
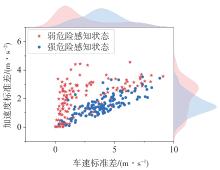
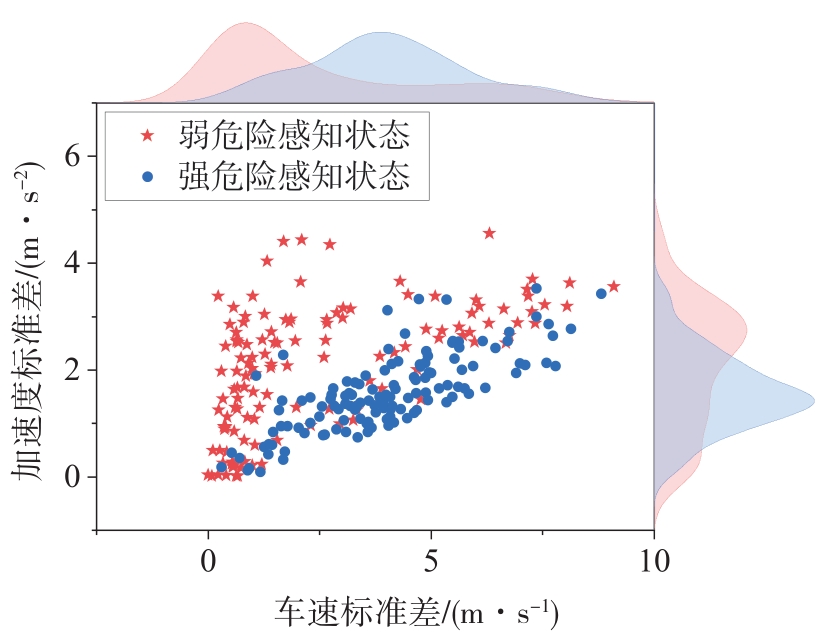
| 车速标准差 | m/s | 2.430 | 2.317 | 4.033 | 1.799 | 0.230 | 0.000* |
| 加速度均值 | m/s2 | -0.655 | 0.544 | -0.665 | 0.431 | 0.292 | 0.859 |
| 加速度标准差 | m/s2 | 2.071 | 1.160 | 1.588 | 0.728 | 0.629 | 0.000* |
| 左眼瞳孔直径变异系数 | 0.055 | 0.022 | 0.054 | 0.024 | 0.032* | 0.434 | |
| 右眼瞳孔直径变异系数 | 0.056 | 0.022 | 0.055 | 0.022 | 0.065 | 0.635 | |
| 注视时长百分比 | % | 57.129 | 22.600 | 55.859 | 24.147 | 0.016* | 0.602 |
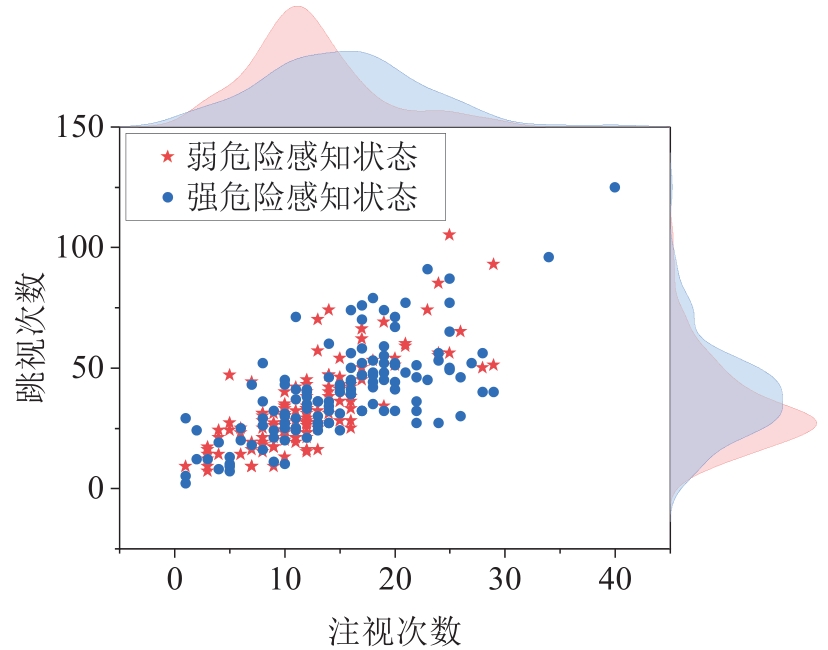
| 注视次数 | 次 | 12.242 | 5.508 | 15.325 | 7.023 | 0.144 | 0.000* |
| 单次注视时长 | s | 0.640 | 0.317 | 0.621 | 0.292 | 0.001* | 0.660 |
| 跳视次数 | 次 | 34.150 | 17.039 | 41.000 | 19.967 | 0.013* | 0.000* |
| 单次眼跳时长 | s | 0.046 | 0.010 | 0.047 | 0.011 | 0.019* | 0.152 |
| 眼动幅度 | 4.212 | 19.725 | 3.743 | 11.418 | 0.000* | 0.171 | |
| 眼动速度均值 | (°)/s | 28.082 | 12.416 | 27.344 | 12.060 | 0.013 | 0.852 |
| 眼动速度标准差 | (°)/s | 72.242 | 26.033 | 70.783 | 23.672 | 0.042 | 0.942 |
"

"
"
"
"
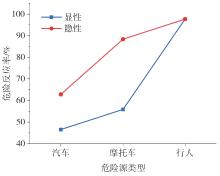
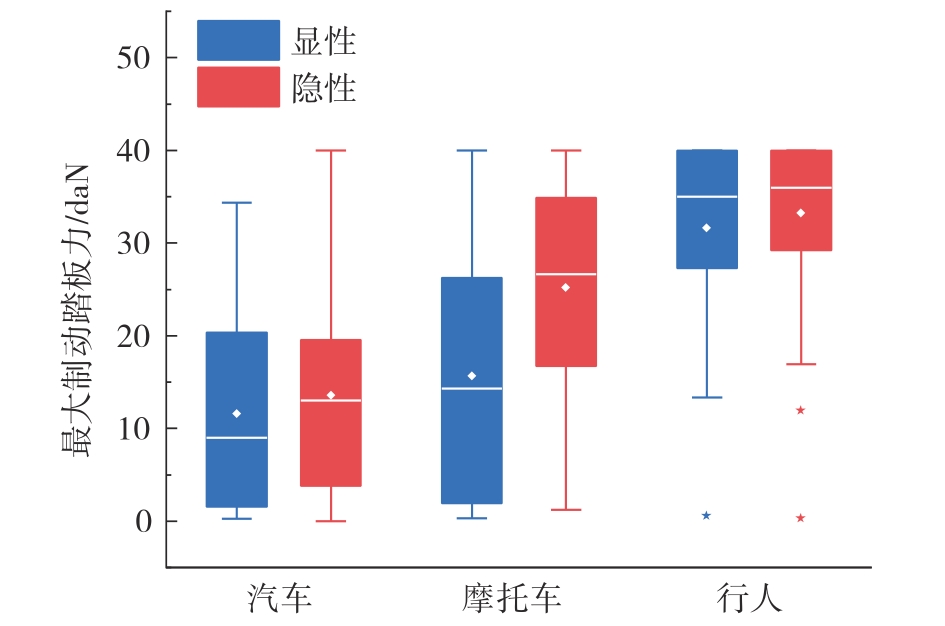
| 类型 | 显隐性 | 车速标准差/ (m·s-1) | 最大制动 踏板力/daN | 加速度标准 差/(m·s-2) | 预减速 时间/s |
|---|---|---|---|---|---|
| 汽车 | 显性 | 1.812 | 11.588 | 1.152 | 1.716 |
| 隐性 | 2.101 | 13.529 | 1.203 | 2.591 | |
| 摩托车 | 显性 | 1.541 | 15.648 | 1.316 | 1.595 |
| 隐性 | 3.556 | 25.194 | 1.695 | 2.196 | |
| 行人 | 显性 | 2.494 | 31.619 | 2.476 | 1.159 |
| 隐性 | 3.393 | 33.222 | 2.404 | 1.253 |
"

"
"
"
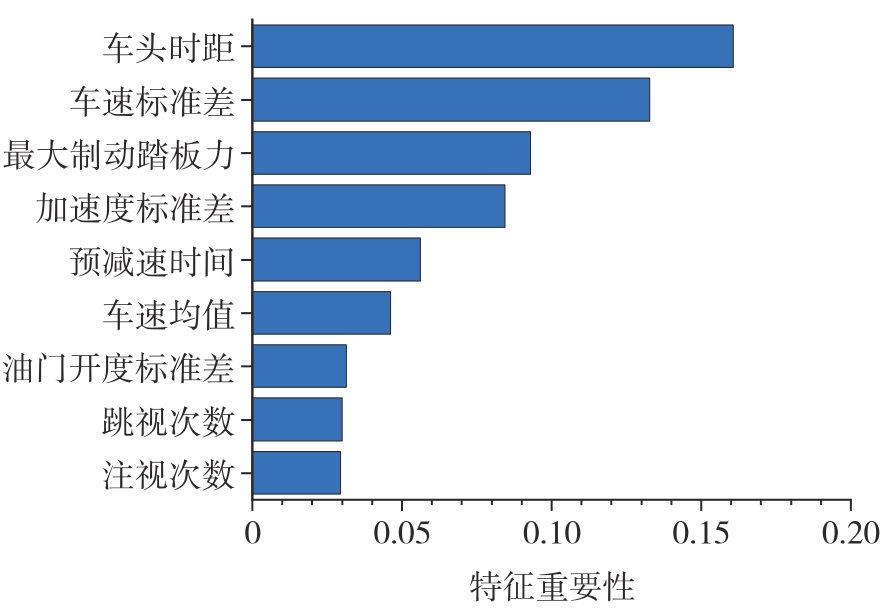
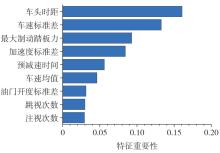
"
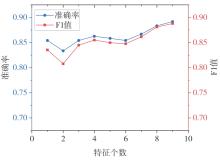
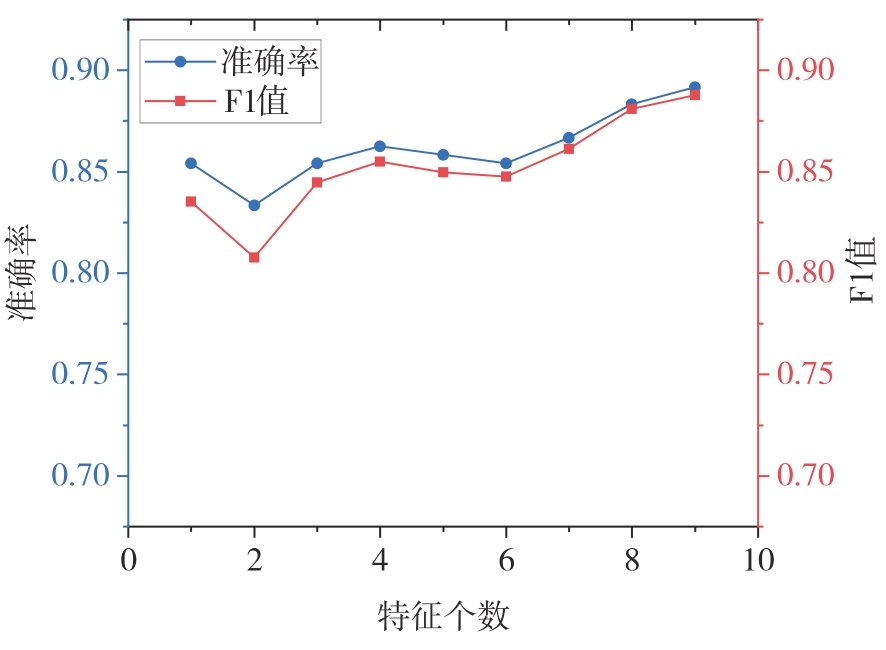
| 特征个数 | 准确率 | 精准率 | 召回率 | F1值 |
|---|---|---|---|---|
| 1 | 0.854 | 0.902 | 0.782 | 0.835 |
| 2 | 0.833 | 0.889 | 0.750 | 0.808 |
| 3 | 0.854 | 0.899 | 0.805 | 0.845 |
| 4 | 0.863 | 0.901 | 0.820 | 0.855 |
| 5 | 0.858 | 0.898 | 0.813 | 0.850 |
| 6 | 0.854 | 0.882 | 0.825 | 0.847 |
| 7 | 0.867 | 0.885 | 0.847 | 0.861 |
| 8 | 0.883 | 0.907 | 0.866 | 0.881 |
| 9 | 0.892 | 0.906 | 0.878 | 0.888 |
"
"
| 参数 | 范围 | 最优值 |
|---|---|---|
| 学习率(learning rate) | [0, 1, 0.01] | 0.09 |
| 树的最大深度(max depth) | [1,10,1] | 1 |
叶子节点最小权重 (min child weight) | [1,10,1] | 2 |
| 节点分裂所需的最小损失函数下降值(gamma) | [0,0.5,0.1] | 0 |
| 迭代训练样本占比(subsample) | [0.5,1,0.1] | 0.5 |
迭代训练特征占比 (colsample bytree) | [0.5,1,0.1] | 0.8 |
| L1正则化参数(reg_alpha) | [0,0.05,0.001] | 0.042 |
| L2正则化参数(reg_lambda) | [0,0.05,0.001] | 0.03 |
"

| 1 | ARSLANYILMAZ A, SULLINS J. Multi-player online simulated driving game to improve hazard perception[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2019, 61: 188-200. |
| 2 | CAO S, SAMUEL S, MURZELLO Y, et al. Hazard perception in driving: a systematic literature review[J]. Transportation Research Record: Journal of the Transportation Research Board, 2022, 2676: 1-25. |
| 3 | COYNE P H. Roadcraft: the essential police driver’s handbook[M]. London: The Stationary Office, 1997. |
| 4 | POLLATSEK A, NARAYANAAN V, PRADHAN A, et al. Using eye movements to evaluate a PC-based risk awareness and perception training program on a driving simulator[J]. Human Factors, 2006, 48(3): 447-464. |
| 5 | BAILLY B, BELLET T, GOUPIL C. Drivers’ mental representations: experimental study and training perspectives[C]. International Conference on Driver Behaviour and Training, 1st, 2003, Stratford-Upon-Avon, United Kingdom, 2003. |
| 6 | ALLEN R W, ROSENTHAL T J, PARK G, et al. Experience with a low cost PC-based system for young driver training[C]. International Conference on Driver Behaviour and Training, 1st, 2003, Stratford-Upon-Avon, United Kingdom, 2003. |
| 7 | MACKENZIE A K, HARRIS J M. Characterizing visual attention during driving and non-driving hazard perception tasks in a simulated environment[C]. Proceedings of the Symposium on Eye Tracking Research and Applications. New York, NY, USA: Association for Computing Machinery, 2014: 127-130. |
| 8 | TAKAHASHI R, KOBAYASHI M, SASAKI T, et al. Driving simulation test for evaluating hazard perception: elderly driver response characteristics[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2017, 49: 257-270. |
| 9 | 郭凤香, 熊昌安, 万华森, 等. 风险情境下老年驾驶人行为特性研究[J]. 中国公路学报, 2021, 34(9): 309-321. |
| GUO F X, XIONG C A,WAN H S, et al. Behavioral characteristics of older drivers based on risk perception[J]. China Journal of Highway and Transport, 2021, 34(9): 309-321. | |
| 10 | VLAKVELD W, ROMOSER M R E, MEHRANIAN H, et al. Do crashes and near crashes in simulator-based training enhance novice drivers’ visual search for latent hazards?[J]. Transportation Research Record, 2011, 2265: 153-160. |
| 11 | 魏田正, 林淼, 李晨新, 等. 基于隐性危险驾驶人感知特性及判别模型研究[J]. 中国安全生产科学技术, 2021, 17(3): 175-181. |
| WEI T Z, LIN M, LI C X, et al. Study of driver’s hazard perception and discriminant model based on covert hazard[J]. Journal of Safety Science and Technology, 2021, 17(3): 175-181. | |
| 12 | 魏田正, 魏雯, 李海梅, 等. 基于XGBoost算法的危险场景驾驶行为模式分析及安全评估[J]. 交通信息与安全, 2022, 40(5): 53-60. |
| WEI T Z, WEI W, LI H M, et al. An analysis of driving behavior model and safety assessment under risky scenarios based on an XGBoost algorithm [J]. Journal of Transport Information and Safety, 2022, 40(5): 53-60. | |
| 13 | 秦雅琴, 张红强, 熊坚, 等. 风险驾驶模拟情境下驾驶人风险感知研究[J]. 交通运输系统工程与信息, 2015, 15(2): 142-148. |
| QIN Y Q,ZHANG H Q, XIONG J, et al. Driver’s hazard perception under simulating risk driving scenarios [J]. Journal of Transportation Systems Engineering and Information Technology, 2015, 15(2): 142-148. | |
| 14 | 谷志朋, 杨京帅, 楚彭子, 等. 基于危险源位置的驾驶人危险感知研究[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44(5): 789-793. |
| GU Z P, YANG J S, CHU P Z, et al. Research on driver's hazard perception based on the location of hazard sources [J]. Journal of Wuhan University of Techonlogy(Transportation Science & Engineering), 2020, 44(5): 789-793. | |
| 15 | 杨京帅, 李秀丽, 任书杭, 等. 驾驶人危险感知影响因素建模与试验[J]. 长安大学学报(自然科学版), 2015, 35(5): 104-110. |
| YANG J S, LI X L, REN S H, et al. Modeling and experimental of influencing factors of drivers' hazard perception [J]. Journal of Chang'an University(Natural Science Edition), 2015, 35(5): 104-110. | |
| 16 | CRUNDALL D. Hazard prediction discriminates between novice and experienced drivers[J]. Accident Analysis & Prevention, 2016, 86: 47-58. |
| 17 | BRIGGS G F, HOLE G J, LAND M F. Imagery-inducing distraction leads to cognitive tunnelling and deteriorated driving performance[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2016, 38: 106-117. |
| 18 | BROBERG T, DUKIC WILLSTRAND T. Safe mobility for elderly drivers—considerations based on expert and self-assessment[J]. Accident Analysis & Prevention, 2014, 66: 104-113. |
| 19 | 秦雅琴, 梁锺月, 贾现广, 等. 驾驶人风险感知类型预测模型研究[J]. 安全与环境学报, 2019, 19(4): 1266-1273. |
| QIN Y Q, LIANG Z Y, JIA X G, et al. Research on the prediction model of driver's risk perception type [J]. Journal of Safety and Environment, 2019, 19(4): 1266-1273. | |
| 20 | CHAN E, PRADHAN A K, POLLATSEK A, et al. Are driving simulators effective tools for evaluating novice drivers’ hazard anticipation, speed management, and attention maintenance skills?[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2010, 13(5): 343-353. |
| 21 | ZHANG W, WANG Y, FENG Z, et al. A method to improve the hazard perception of young novice drivers based on Bandura’s observational learning theory: supplement to expert commentary training[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2022, 85: 133-149. |
| 22 | ASADAMRAJI M, SAFFARZADEH M, ROSS V, et al. A novel driver hazard perception sensitivity model based on drivers’ characteristics: a simulator study[J]. Traffic Injury Prevention, 2019, 20(5): 492-497. |
| 23 | LI Z, BAO S, KOLMANOVSKY I V, et al. Visual-manual distraction detection using driving performance indicators with naturalistic driving data[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(8): 2528-2535. |
| 24 | 糜江, 喻恺, 黄菊. 基于多模轨迹融合的货车危险驾驶行为辨识[J]. 中国交通信息化, 2023(2): 113-117. |
| MI J, YV K, HUANG J. Truck hazard driving based on multi-mode trajectory fusion is identified [J]. China ITS Journal, 2023(2): 113-117. | |
| 25 | 唐智慧, 郑伟皓, 吴海涛. 基于Kohonen-SVM模型的驾驶行为险态动态辨识[J]. 安全与环境学报, 2018, 18(4): 1386-1390. |
| TANG Z H, ZHENG W H, WU H T. Dynamic identification of dangerous driving behavior based on Kohonen-SVM model [J]. Journal of Safety and Environment, 2018, 18(4): 1386-1390. | |
| 26 | 张长水. 机器学习面临的挑战[J]. 中国科学:信息科学, 2013, 43(12): 1612-1623. |
| ZHANG C S. Challenges of machine learning [J]. SCIENTIA SINICA Informationis, 2013, 43(12): 1612-1623. | |
| 27 | MOLCHANOV P, GUPTA S, KIM K, et al. Multi-sensor system for driver’s hand-gesture recognition[C]. 2015 11th IEEE International Conference and Workshops on Automatic Face and Gesture Recognition (FG): Vol. 1. 2015: 1-8. |
| 28 | ZHANG C, PATEL M, BUTHPITIYA S, et al. Driver classification based on driving behaviors[C]. Proceedings of the 21st International Conference on Intelligent User Interfaces. Sonoma California USA, 2016: 80-84. |
| 29 | WATLING C N, HOME M. Hazard perception performance and visual scanning behaviours: the effect of sleepiness[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2022, 90: 243-251. |
| 30 | LEWSEY J. Medical statistics: a guide to data analysis and critical appraisal[J]. Annals of The Royal College of Surgeons of England, 2006, 88(6): 603. |
| 31 | GHASEMI A, ZAHEDIASL S. Normality tests for statistical analysis: a guide for non-statisticians[J]. International Journal of Endocrinology and Metabolism, 2012, 10(2): 486-489. |
| 32 | KRZYWINSKI M, ALTMAN N. Nonparametric tests[J]. Nature Methods, 2014, 11(5): 467-468. |
| 33 | 陈凯亮, 李唯真, 张泽庆. 融合XGBoost与SHAP的机动车交通事故致因机理分析[J]. 汽车实用技术, 2023, 48(4): 179-185. |
| CHEN K L, LI W Z, ZHANG Z Q. Severity analysis of vehicle traffic accidents based on XGBoost and SHAP [J]. Automobile Applied Technology, 2023, 48(4): 179-185. | |
| 34 | 肖宇, 赵建有, 叱干都, 等. 基于XGBoost的短时出租车速度预测模型[J]. 交通信息与安全, 2022, 40(3): 163-170. |
| XIAO Y, ZHAO J Y, CHI G D, et al. A short-term prediction model for taxi speed based on XGBoost[J]. Journal of Transport Information and Safety, 2022, 40(3): 163-170. | |
| 35 | 彭一川, 李崇奕, 王可, 等. 基于权重的欠采样提升算法识别激进驾驶员[J]. 武汉理工大学学报(交通科学与工程版), 2021, 45(2): 195-201. |
| PENG Y C, LI C Y, WANG K, et al. A weight-based undersampling boosting algorithm identifies aggressive drivers [J]. Journal of Wuhan University of Techonlogy(Transportation Science & Engineering), 2021, 45(2): 195-201. | |
| 36 | 高雪林, 汤厚骏, 沈佳平, 等. 基于XGBoost的高速公路事故类型及严重程度预测方法[J]. 交通信息与安全, 2023, 41(4): 55-63. |
| GAO X L, TANG H J, SHEN J P, et al. A method for predicting the type and severity of freeway accidents based on XGBoost[J]. Journal of Transport Information and Safety, 2023, 41(4): 55-63. | |
| 37 | 唐瀛, 闫仁武. 基于改进SVM算法的车牌识别研究[J]. 现代计算机, 2021, 27(30): 88-93. |
| TANG Y, YAN R W. License plate recognition based on improved SVM algorithm[J]. Modern Computer, 2021, 27(30):88-93. |
| [1] | Weidong Liu,Zongzhi Han,Zhenhai Gao,Yanhu Kang. Real-Time Pavement Recognition Technology Based on Intelligent Tire System [J]. Automotive Engineering, 2024, 46(4): 617-625. |
| [2] | Lin Chen,Manping He,Shuxiao Wu,Deqian Chen,Mingsi Zhao,Haihong Pan. Fast Clustering of Retired Lithium-ion Batteries Based on Adaptive Fuzzy C-means Algorithm [J]. Automotive Engineering, 2024, 46(4): 643-651. |
| [3] | Xinghua Wang,Lin Hu,Yong Peng,Xianhui Wu,Guoliang Xiang,Qian Xu. Research on Drivers' Hazard Perception Before Vehicle-to-Powered Two-Wheeler Crashes [J]. Automotive Engineering, 2024, 46(3): 498-508. |
| [4] | Yanli Ma, Qin Qin, Fangqi Dong, Yining Lou. Takeover Risk Assessment Model Based on Risk Field Theory Under Different Cognitive Secondary Tasks [J]. Automotive Engineering, 2024, 46(1): 9-17. |
| [5] | Jiqing Chen,Zihan Li,Fengchong Lan,Xinping Jiang,Wei Pan,Jikai Chen. Real-Vehicle Battery Health State Estimation Based on Nonlinear Reduced-Dimensional IC Features [J]. Automotive Engineering, 2023, 45(2): 199-208. |
| [6] | Gege Cui,Lü Chao,Jinghang Li,Zheyu Zhang,Guangming Xiong,Jianwei Gong. Data-Driven Personalized Scenario Risk Map Construction for Intelligent Vehicles [J]. Automotive Engineering, 2023, 45(2): 231-242. |
| [7] | Yanli Ma,Jun Lu,Jieyu Zhu,Xiaoxue Han. Take-over Performance Prediction Under Different Cognitive Loads of Non-driving Tasks in Highly Automated Driving [J]. Automotive Engineering, 2023, 45(12): 2330-2337. |
| [8] | Junzhao Jiang,Wenhao Yang,Bin Peng,Ting Guo,Yekai Xu,Guozhuo Wang. Driving Range Prediction of Fuel Cell Vehicles Based on Energy Consumption Weighting Strategy [J]. Automotive Engineering, 2023, 45(12): 2357-2365. |
| [9] | Zhicheng He,Zejun Xie,Kan Liu,Enlin Zhou,Qian Tang,Yuanyi Huang. Collaborative Design Optimization of Pure Electric Vehicle Drivetrain and Motor Structure Parameters [J]. Automotive Engineering, 2023, 45(11): 2113-2122. |
| [10] | Yubo Lian,Heping Ling,Junbin Wang,Hua Pan,Zhao Xie. A Real-time Thermal Runaway Detection Method of Power Battery Based on Guassian Mixed Model and Hidden Markov Model [J]. Automotive Engineering, 2023, 45(1): 139-146. |
| [11] | Wenmin Long,Guangquan Lu,Xi Shi,Haitian Tan. Determination Method of Forward Collision Warning Indicator and Threshold Based on Drivers’ Car-Following Characteristics [J]. Automotive Engineering, 2022, 44(9): 1339-1349. |
| [12] | Jian Zhao,Yaxin Li,Jing Tong,Bing Zhu,Weixiang Wu,Bohua Sun,Jiayi Han. Cross-Country Road Classification Method Based on Vehicle Dynamic Response Characteristics [J]. Automotive Engineering, 2022, 44(6): 909-918. |
| [13] | Jing Huang,Yang Peng,Ye Huang,Xiaoyan Peng. Evaluation of Driver's Mental Load State Considering the Influence of Noisy Labels [J]. Automotive Engineering, 2022, 44(5): 771-777. |
| [14] | Jie Hu,Xueling Zhu,Chen He,Guangyu Yang. Prediction on Battery State of Health of Electric Vehicles Based on Real Vehicle Data [J]. Automotive Engineering, 2021, 43(9): 1291-1299. |
| [15] | Baicang Guo,Xianyi Xie,Lisheng Jin,Hui Rong,Yang He,Bingdong Ji. Braking Response Time Prediction Model Based on Multi-dimensional Driving Characteristics [J]. Automotive Engineering, 2021, 43(11): 1683-1692. |
|