Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (5): 888-896.doi: 10.19562/j.chinasae.qcgc.2025.05.009
Previous Articles Next Articles
Jian Zhao1,Cong He1,Feng Liu2,Bing Zhu1,Jing Chen1,Zhicheng Chen1( )
)
Received:2024-01-12
Revised:2024-08-01
Online:2025-05-25
Published:2025-05-20
Contact:
Zhicheng Chen
E-mail:chenzhicheng@jlu.edu.cn
Jian Zhao,Cong He,Feng Liu,Bing Zhu,Jing Chen,Zhicheng Chen. Adaptive Anti-jamming Angle Control Strategy for Steer-by-Wire System[J].Automotive Engineering, 2025, 47(5): 888-896.
"
"
"
"
| 参数 | 含义 | 数值 |
|---|---|---|
| 电机定子电阻 | ||
| 电机励磁轴电感 | ||
| 电机转矩轴电感 | ||
| 电机永磁体磁链 | ||
| 电机磁极对数 | ||
| 转向执行电机转动惯量 | ||
| 转向执行电机阻尼系数 | ||
| 等效系统的转动惯量 | ||
| 等效系统的阻尼系数 | ||
| 等效系统的摩擦因数 |
"
| 缩写 | 具体控制策略 |
|---|---|
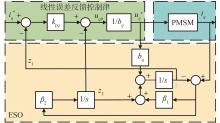
| 本文 | 位置环(RBF-SMC)+电流环(LADRC) |
| 控制器1 | 位置环(SMC[ |
| 控制器2 | 位置环(RBF-SMC)+电流环(PI) |
| 控制器3 | 位置环(RBF-SMC)+电流环(CFDC[ |
| 控制器4 | 位置环(PI)+转速环(PI)+电流环(PI) |
"
| 参数 | 含义 | 数值 |
|---|---|---|
| 本文滑模面控制参数 | ||
| 本文滑模趋近律参数 | ||
| 本文RBF函数中心点 | -1;-0.5;0;0.5;1 | |
| 本文RBF函数宽度 | ||
| 本文RBF逼近误差 | ||
| 本文RBF自适应律 | ||
| 本文电流环转矩轴参数 | ||
| 本文电流环励磁轴参数 | ||
| 控制器1滑模面控制参数 | ||
| 控制器1滑模趋近律参数 | ||
| 控制器2励磁轴PI参数 | ||
| 控制器2转矩轴PI参数 | ||
| 控制器3电流环调节系数 | 100,10 000 | |
| 控制器4位置环PI参数 | ||
| 控制器4转速环PI参数 | ||
| 控制器4励磁轴PI参数 | ||
| 控制器4转矩轴PI参数 |

"
"
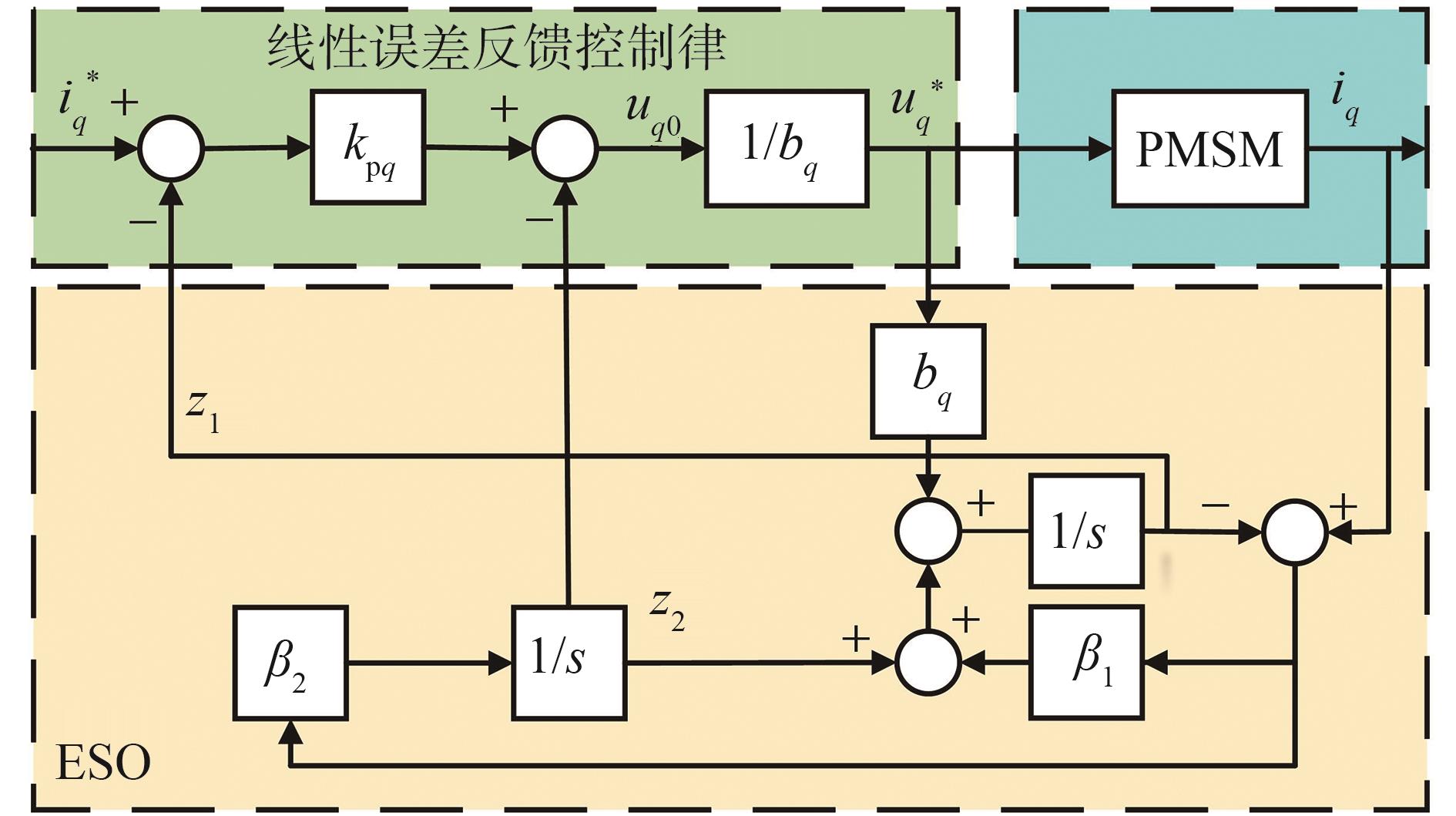
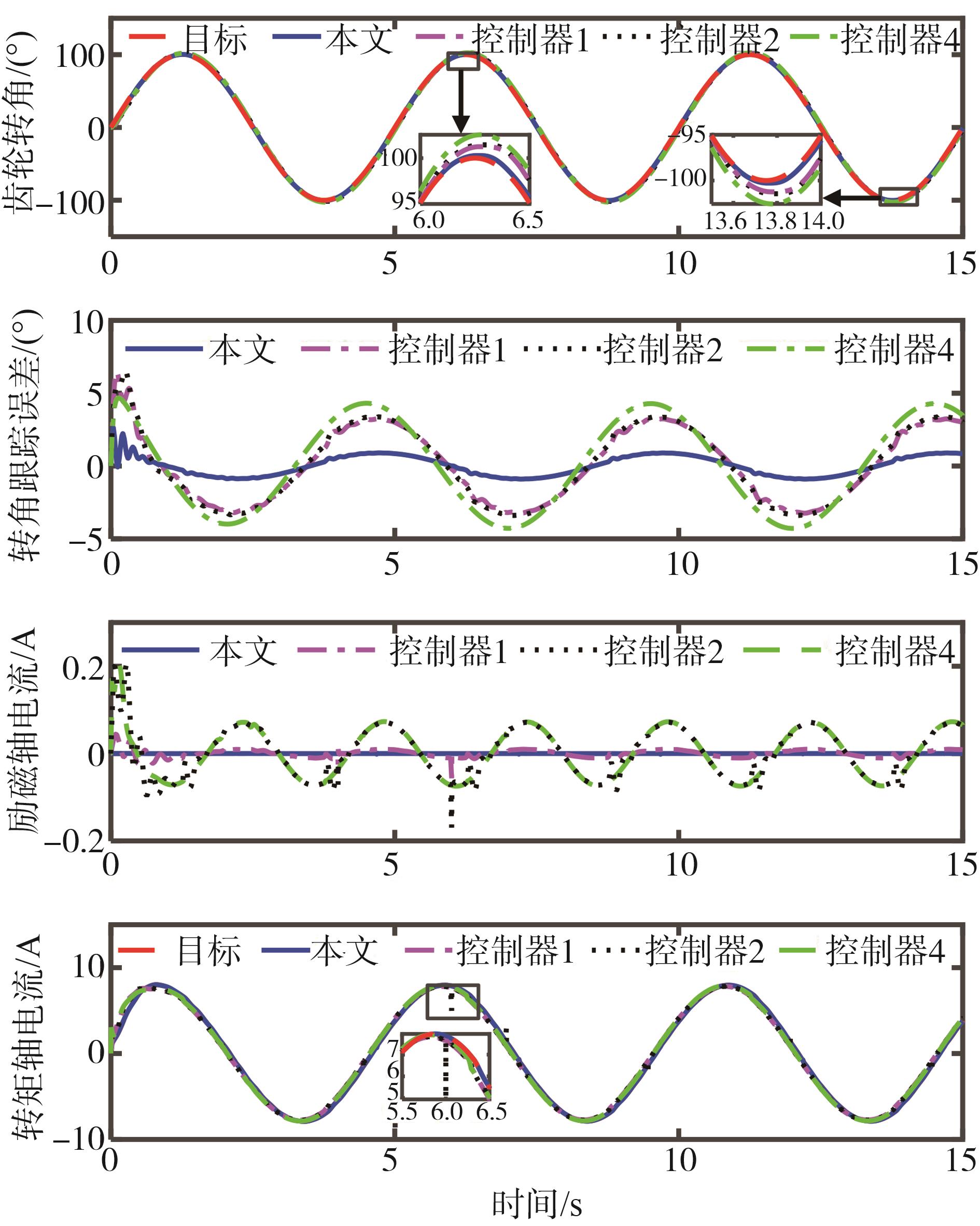
| 工况 | 具体说明 | |
|---|---|---|
| 变斜坡 | 时间 | 0 |
| 目标转角 | ||
| 电机电感 | ||

"
"

"

"
"
| 1 | 卢少波, 谢菲菲, 张博涵, 等. 基于非对称势场的人车协同博弈避撞[J]. 汽车工程, 2022, 44(10): 1484-1493. |
| LU S B, XIE F F, ZHANG B H, et al. Human-vehicle cooperative game collision avoidance based on asymmetric potential fields[J]. Automotive Engineering, 2022, 44(10): 1484-1493. | |
| 2 | 李子先, 潘世举, 徐友春. 8轮分布式电驱动车辆AFS和DYC协同控制[J]. 汽车工程, 2023, 45(3): 409-420. |
| LI Z X, PAN S J, XU Y C. Coordinated control of AFS and DYC for 8-wheel distributed electric drive vehicle[J]. Automotive Engineering, 2023, 45(3): 409-420. | |
| 3 | 赵万忠,张寒,邹松春,等. 线控转向系统控制技术综述[J]. 汽车安全与节能学报, 2021, 12(1): 18-34. |
| ZHAO W Z, ZHANG H, ZOU S C,et al. Overview of vehicle steer-by-wire system control technologies[J]. Journal of Automotive Safety and Energy, 2021, 12(1): 18-34. | |
| 4 | LI C M, ZHAO H, ZHEN S C, et al. Control design with optimization for fuzzy steering-by-wire system based on nash game theory[J]. IEEE Transactions on Cybernetics, 2022, 52(8): 7694-7703. |
| 5 | IRMER M, DEGEN R, NUBGEN A, et al. Development and analysis of a detail model for steer-by-wire systems[J]. IEEE Access, 2023, 11(11): 7229-7236. |
| 6 | CETIN A E, ADLI M A, BARKANA D E, et al. Implementation and development of an adaptive steering-control system[J]. IEEE Transactions on Vehicular Technology, 2010, 59(1): 75-83. |
| 7 | 张博, 张建伟, 郭孔辉, 等. 基于电动助力转向系统的转向盘转角跟随算法[J]. 吉林大学学报(工学版), 2019, 49(2): 336-344. |
| ZHANG B, ZHANG J W, GUO K H, et al. Steering wheel corner following algorithm based on electric power steering system[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(2): 336-344. | |
| 8 | 罗建南, 朱光钰, 杨浩瀚, 等. 线控转向系统的前轮转角跟踪策略研究[J]. 机械工程学报, 2019, 55(22): 165-173. |
| LUO J N, ZHU G Y, YANG H H, et al. Study on front wheel angle tracking strategy of steering-by-wire system[J]. Journal of Mechanical Engineering, 2019, 55(22): 165-173. | |
| 9 | 余卓平, 章仁夑, 熊璐, 等. 考虑线控转向非线性和不确定性的转向角控制[J]. 同济大学学报(自然科学版), 2017, 45(1): 79-86. |
| YU Z P, ZHANG R X, XIONG L, et al. Steer-by-wire systems considering nonlinear characteristic and uncertainty parameters [J]. Journal of Tongji University (Natural Science), 2017, 45(1): 79-86. | |
| 10 | ZHANG J, WANG H, MA M Y, et al. Active front steering-based electronic stability control for steer-by-wire vehicles via terminal sliding mode and extreme learning machine[J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14713-14726. |
| 11 | HE L, GUO C L, XU Z, et al. Particle-swarm backstepping control for angle tracking of electric motor steer-by-wire system[J]. IEEE Transactions on Transportation Electrification, 2023,9(2): 2038-2047. |
| 12 | WANG H, MAN Z H, SHEN W X, et al. Robust control for steer-by-wire systems with partially known dynamics[J]. IEEE Transactions on Industrial Informatics, 2014, 10(4): 2003-2015. |
| 13 | SUN Z, ZHENG J C, ZHI H M, et al. Robust control of a vehicle steer-by-wire system using adaptive sliding mode[J]. IEEE Transactions on Industrial Electronics, 2016, 63(4): 2251-2262. |
| 14 | ZHAO J, YANG K H, CAO Y C, et al. Observer-based discrete-time cascaded control for lateral stabilization of steer-by-wire vehicles with uncertainties and disturbances[J]. IEEE Transactions on Circuits and Systems, 2023, 70(8): 3347-3358. |
| 15 | 陈辛波, 罗杰, 杭鹏, 等. 某新型线控转向系统的自适应模糊滑模控制[J]. 汽车工程, 2018, 40(5): 568-574. |
| CHEN X B, LUO J, HANG P, et al. Adaptive fuzzy sliding mode control for a novel steering-by-wire system[J]. Automotive Engineering, 2018, 40(5): 568-574. | |
| 16 | 李红娟, 王泽政, 王永富. 线控转向系统的自适应高阶滑模控制[J]. 控制与决策, 2021, 36(6): 1529-1536. |
| LI H J, WANG Z Z, WANG Y F. Adaptive higher-order sliding mode control for SBW system[J]. Control and Decision, 2021, 36(6): 1529-1536. | |
| 17 | CHANG K T, LOW T S, LEE T H. An optimal speed controller for permanent magnet synchronous motor drives[J]. IEEE Transactions on Industrial Electronics, 1994,41(5): 503-510. |
| 18 | ZHU H, XIAO X, LI Y D. PI type dynamic decoupling control scheme for PMSM high speed operation[C]. 2010 25th Annual IEEE Applied Power Electronics Conference and Exposition (APEC). Palm Springs, USA: IEEE, 2010: 1736-1739. |
| 19 | XIA C L, YAN Y, SONG P, et al. Voltage disturbance rejection for matrix converter-based PMSM drive system using internal model control[J]. IEEE Transactions on Industrial Electronics, 2012, 59(1): 361-372. |
| 20 | HUSSAIN A H. Tuning and performance evaluation of 2DOF PI current controllers for PMSM drives[J]. IEEE Transactions on Transportation Electrification, 2021, 7(3): 1401-1414. |
| 21 | 张志坚, 荆龙, 赵宇明, 等. 高速低开关频率下永磁同步电机的解耦控制[J]. 中国电机工程学报, 2020, 40(19): 6345-6353. |
| ZHANG Z J, JING L, ZHAO Y M, et al. Decoupling control of permanent magnet synchronous motor at high speed and low switching frequency[J]. Proceedings of the CSEE, 2020,40(19): 6345-6353. | |
| 22 | 刘宇博, 王旭东, 周凯. 基于滑模观测器的永磁同步电机电流偏差解耦控制[J]. 电工技术学报, 2020, 35(8): 1642-1652. |
| LIU Y B, WANG X D, ZHOU K. Decoupling control of current deviation of permanent magnet synchronous motor based on sliding mode observer[J]. Transactions of China Electrotechnical Society, 2020, 35(8): 1642-1652. | |
| 23 | 吴为, 丁信忠, 严彩忠. 基于复矢量的电流环解耦控制方法研究[J]. 中国电机工程学报, 2017, 37(14): 4184-8191. |
| WU W, DING X Z, YAN C Z. Research on control method of current loop decoupling based on complex vector[J]. Proceedings of the CSEE, 2017, 37(14): 4184-4191. | |
| 24 | 陈志成, 朱冰, 赵健, 等. 考虑非线性特性的电控助力制动系统多闭环压力控制策略[J]. 机械工程学报, 2023, 59(4): 190-198. |
| CHEN Z C, ZHU B, ZHAO J, et al. Multi-closed-loop pressure control strategy considering nonlinear characteristics of electro-booster brake system[J]. Journal of Mechanical Engineering, 2023, 59(4): 190-198. |
| [1] | Xuanyu Shi,Yingfeng Cai,Hai Wang,Xiaoqiang Sun,Long Chen,Chao Yang. Brake Stability Control Technology of Multi-axle Commercial Vehicle on Wet and Low Adhesion Road [J]. Automotive Engineering, 2025, 47(2): 259-268. |
| [2] | Jian Zhao,Jinpeng Du,Bing Zhu,Zhicheng Chen,Jian Wu. Adaptive Pressure Control Strategy for Integrated Electro-Hydraulic Braking System [J]. Automotive Engineering, 2024, 46(8): 1479-1488. |
| [3] | Lisheng Jin,Hongyu Zhang,Baicang Guo. Semi Solid-State LiDAR Object Detection Algorithm Enhanced by Feature Stability Enhancement [J]. Automotive Engineering, 2024, 46(6): 1015-1024. |
| [4] | Bing Zhu,Yanpeng Tang,Dongbo Zhang,Jian Zhao,Zhicheng Chen. Adaptive Pressure Control for Electronic Boost Brake System Considering Multi-dimensional Nonlinear Disturbances [J]. Automotive Engineering, 2024, 46(6): 1096-1103. |
| [5] | Bing Zhou,Kangqiang Zheng,Ru Wang,Xiaojian Wu,Tian Chai. Adaptive Collision Avoidance Control Considering Available Road Width [J]. Automotive Engineering, 2024, 46(5): 893-905. |
| [6] | Jian Wu,Hanlin Wang,Bing Zhu,Jian Zhao,Zhicheng Chen. Adaptive Control Strategy for Vehicle Yaw Stability Considering Dynamic Multi-objective Requirements [J]. Automotive Engineering, 2024, 46(12): 2329-2338. |
| [7] | Tianfei Ma,Bo Li,Bing Zhu,Jian Zhao. Ultrasonic Radar Modeling of Automatic Parking System Considering Atmospheric Conditions Effect [J]. Automotive Engineering, 2023, 45(9): 1646-1654. |
| [8] | Xichen Li,Hong Zhang,Xiaotian Xie,Bowen Wang,Xinyu Wang. Complicated Road Surface Identification Algorithm with Prevention of ASR False Activation [J]. Automotive Engineering, 2022, 44(5): 756-763. |
| [9] | Haobin Jiang,Zhangqi Feng,Yangke Hong,Qizhi Wei,Jian Pi. Model-free Adaptive Sliding Mode Predictive Control Algorithm for Vehicle Longitudinal Control [J]. Automotive Engineering, 2022, 44(3): 319-329. |
| [10] | Dehua Shi,Xiangwei Rong,Shaohua Wang,Kaimei Zhang,Long Chen,Chun Li. Research on the Optimal Dynamic Coordinated Control of Power Split Hybrid Electric Vehicles with Dual-Clutch Collaboration [J]. Automotive Engineering, 2022, 44(12): 1877-1888. |
| [11] | Jian Zhao,Jinpeng Du,Bing Zhu,Zhiwei Wang,Zhicheng Chen,Xiaowen Tao. Longitudinal Cruise Control of Intelligent Vehicles Based on Adaptive Dynamic Sliding Mode Control [J]. Automotive Engineering, 2022, 44(1): 8-16. |
| [12] | Yonggang Liu,Jingchen Zhang,Yougang Wan,Dongye Sun,Datong Qin. Adaptive Shifting Control for Data Driven Dual Clutch Transmission [J]. Automotive Engineering, 2021, 43(6): 891-898. |
| [13] | Zhe Liu,Yunkai Gao,Xiang Xu,Jiaju Chen,Chao Ma. Simulation and Experimental Study on Vehicle Interior Sound Field During Door Closing [J]. Automotive Engineering, 2021, 43(6): 909-916. |
| [14] | Bing Zhu,Wanli Jin,Lun Li,Jian Zhao,Zhicheng Chen,Yihan Zhang,Weinan Li. Evaluation of Brake Pedal Feeling Based on Subjective and Objective Comprehensive Weighting Method [J]. Automotive Engineering, 2021, 43(5): 697-704. |
| [15] | Ruiliang Zhang,Zhun Chen,Senhai Liu,Zhengwu Fan. Adaptive Energy Management Strategy for High Power Hydrogen Fuel Cell Heavy-duty Truck Based on Low Pass Filter [J]. Automotive Engineering, 2021, 43(11): 1693-1701. |
|
||