Administrator by China Associction for Science and Technology
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Sponsored by China Society of Automotive Engineers
Published by AUTO FAN Magazine Co. Ltd.
Automotive Engineering ›› 2025, Vol. 47 ›› Issue (8): 1437-1447.doi: 10.19562/j.chinasae.qcgc.2025.08.001
Mingyue Ma,Zelin Miao,Weiqing Wang,Guangming Zhao( ),Changjun Wang()
),Changjun Wang()
Received:2024-10-29
Revised:2025-02-24
Online:2025-08-25
Published:2025-08-18
Contact:
Guangming Zhao,Changjun Wang
E-mail:zgmbright@163.com;wcj121@sina.com
Mingyue Ma,Zelin Miao,Weiqing Wang,Guangming Zhao,Changjun Wang. Research on Construction of Autonomous Driving Simulation Scenario Based on the Traffic Rule Model[J].Automotive Engineering, 2025, 47(8): 1437-1447.

"
"
| 名称 | 符号 | 句法示例 |
|---|---|---|
| 否定 | ? | ?φn |
| 合取 | ? | φn ?φn+1 |
| 析取 | ? | φn ?φn+1 |
| 蕴含 | → | P→C |
| 下一时刻 | Χ | Χωn |
| 直到 | U | ωnUωn+1 |
| 总是 | G | |
| 最终 | F | Fωn |
| t1~t2内总是发生 | G(t1,t2) | G(t1,t2)ωn |
| t1~t2内会发生 | F(t1,t2) | F(t1,t2)ωn |

"
"

"

"
"
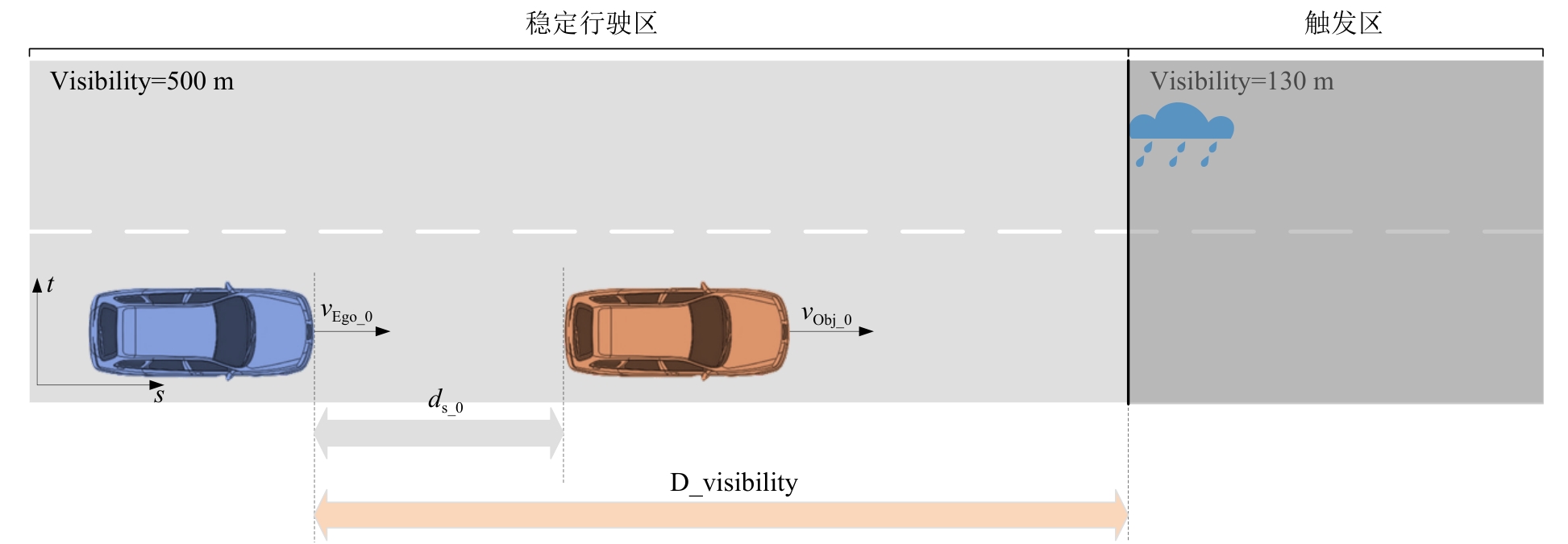
| 要素 | 稳定行驶区 | 触发区 | ||||
|---|---|---|---|---|---|---|
vEgo_0/ (km·h-1) | vObj_0/(km·h-1) | ds_0/m | m | m | ||
| 上限 | 120 | 100 | 200 | |||
| 下限 | 60 | 60 | 50 | 200 | 200 | 100 |
"
| 序号 | 违规项目 | 违规测试用例数量 | 违规率 | 违规情形 |
|---|---|---|---|---|
| 1 | MTL_TrafficRegulation84.01 | 10 | 50% | 通过施工作业路段,未减速行驶。 |
| 2 | MTL_TrafficRegulation59.09 | 10 | 50% | 通过事故发生路段,未减速慢行。 |
| 3 | MTL_Trafficlaw42.02 | 5 | 100% | 夜间道路行驶,未减速。 |
| 4 | MTL_Trafficlaw42.03 | 5 | 100% | 危险路段行驶,未减速。 |
| 5 | MTL_TrafficRegulation80.02 | 5 | 100% | 稳定行驶过程中与前车安全距离不足。 |
| 6 | MTL_TrafficRegulation53.04 | 5 | 100% | 在车道减少的路段遇到前方机动车停车排队等候,长时间未能通过,且未能发出接管请求。 |
| 7 | MTL_TrafficRegulation53.05 | 5 | 100% | 在车道减少的路段遇到前方机动车缓慢行驶,长时间未能通过,且未能发出接管请求。 |
| 8 | MTL_Trafficlaw53.04 | 5 | 100% | 后方有正在执行紧急任务的警车加速靠近,长时间未能让行,且未能发出接管请求。 |
| 9 | MTL_Trafficlaw53.05 | 5 | 100% | 后方有正在执行紧急任务的消防车加速靠近,长时间未能让行,且未能发出接管请求。 |
| 10 | MTL_Trafficlaw53.06 | 5 | 100% | 后方有正在执行紧急任务的救护车加速靠近,长时间未能让行,且未能发出接管请求。 |
| 11 | MTL_Trafficlaw53.07 | 5 | 100% | 后方有正在执行紧急任务的工程救险车加速靠近,长时间未能让行,且未能发出接管请求。 |
| 12 | MTL_Trafficlaw38.11 | 5 | 100% | 遇交通警察发出要求-靠边停车信号,未能停车,且未发出接管请求。 |
| 总计 | 12 | 70 |
"
| 序号 | 违规项目 | 测试用例数量 | 违规率 | 违规情形 |
|---|---|---|---|---|
| 1 | MTL_Trafficlaw42.02 | 10 | 100% | 夜间道路行驶,未减速。 |
| 2 | MTL_Trafficlaw42.04 | 5 | 100% | 遇有沙尘、冰雹、雨、雪、雾、结冰等气象条件行驶时,未减速。 |
| 3 | MTL_TrafficRegulation59.09 | 5 | 100% | 通过事故发生路段,未减速慢行。 |
| 4 | MTL_TrafficRegulation84.01 | 5 | 100% | 通过施工作业路段,未减速行驶。 |
| 5 | MTL_Trafficlaw42.03 | 5 | 100% | 车辆平均行驶速度超过最高限速标线表明的速度。 |
| 6 | MTL_TrafficRegulation81.01 | 5 | 100% | 雾天在高速公路上行驶且能见度低于50 m,未按照规定速度行驶,且未能发出接管请求。 |
| 7 | MTL_TrafficRegulation81.02 | 5 | 100% | 雨天在高速公路上行驶且能见度低于50 m,未按照规定速度行驶,且未能发出接管请求。 |
| 8 | MTL_TrafficRegulation81.03 | 5 | 100% | 雾天在高速公路上行驶且能见度低于100 m,未按照规定速度行驶,且未能发出接管请求。 |
| 9 | MTL_TrafficRegulation81.04 | 5 | 100% | 雨天在高速公路上行驶且能见度低于100 m,未按照规定速度行驶,且未能发出接管请求。 |
| 10 | MTL_Trafficlaw53.04 | 10 | 100% | 后方有正在执行紧急任务的警车加速靠近,长时间未能让行,且未能发出接管请求。 |
| 11 | MTL_Trafficlaw53.05 | 10 | 100% | 后方有正在执行紧急任务的消防车加速靠近,长时间未能让行,且未能发出接管请求。 |
| 12 | MTL_Trafficlaw53.06 | 10 | 100% | 后方有正在执行紧急任务的救护车加速靠近,长时间未能让行,且未能发出接管请求。 |
| 13 | MTL_Trafficlaw53.07 | 10 | 100% | 后方有正在执行紧急任务的工程救险车加速靠近,长时间未能让行,且未能发出接管请求。 |
| 14 | MTL_TrafficRegulation44.03 | 10 | 50% | 车辆向左变道,未按照规定让行左侧相临车道后方车辆。 |
| 15 | MTL_TrafficRegulation44.09 | 15 | 50% | 车辆向右变道,未按照规定让行右侧相临车道后方车辆。 |
| 16 | MTL_TrafficRegulation38.05 | 10 | 100% | 车辆遇黄灯且已过停止线,停在路口中间,未按照规定继续行驶。 |
| 17 | MTL_Trafficlaw38.11 | 10 | 100% | 遇交通警察发出要求-靠边停车信号,未能停车,且未发出接管请求。 |
| 总计 | 17 | 135 |
| [1] | 北京市自动驾驶车辆道路测试报告(2023年)[R/OL].北京智能车联产业创新中心,2024. http://www.mzone.site/index.php/index/index/cid/2/sid/21.html. |
| Road test report of self-driving vehicles in Beijing (2023)[R/OL]. Beijing Intelligent Vehicle Association Industry Innovation Center,2024. http://www.mzone.site/index.php/index/index/cid/2/sid/21.html. | |
| [2] | 上海市智能网联汽车发展报告(2023年度)[R/OL].上海市交通委员会,2024. https://jtw.sh.gov.cn/zxzfxx/20240205/7aa0c16cc00e42cb9b3311b564dc8ffe.html. |
| Report on the development of intelligent connected vehicles in Shanghai(2023) [R/OL]. Shanghai Municipal Transportation Commission, 2024. https://jtw.sh.gov.cn/zxzfxx/20240205/7aa0c16cc00e42cb9b3311b564dc8ffe.html. | |
| [3] | BUECHEL M, HINZ G, RUEHL F, et al. Ontology-based traffic scene modeling, traffic regulations dependent situational awareness and decision-making for automated vehicles[C]. 2017 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2017: 1471-1476. |
| [4] | 工业和信息化部 公安部 住房和城乡建设部 交通运输部关于开展智能网联汽车准入和上路通行试点工作的通知[EB/OL]. (2023-11-17)[2024-10-10]. https://ythxxfb.miit.gov.cn/ythzxfwpt/hlwmh/tzgg/xzxk/clsczr/art/2023/art_ae314a1df30e4ba1a49bd4ffa10186f6.html. |
| Notice of MIIT, MPS, MOHURD and MOT on carrying out pilot work on access and road traffic of intelligent connected vehicles[EB/OL]. (2023-11-17)[2024-10-10]. https://ythxxfb.miit.gov.cn/ythzxfwpt/hlwmh/tzgg/xzxk/clsczr/art/2023/art_ae314a1df30e4ba1a49bd4ffa10186f6.html. | |
| [5] | BENCH-CAPON T J M, ROBINSON G O, ROUTEN T W, et al. Logic programming for large scale applications in law: a formalisation of supplementary benefit legislation[C]. Proceedings of the lst International Conference on Artificial Intelligence and Law, 1987: 190-198. |
| [6] | RIZALDI A, ALTHOFF M. Formalising traffic rules for accountability of autonomous vehicles [C]. 2015 IEEE 18th International Conference on Intelligent Transportation Systems. IEEE, 2015:1658-1665. |
| [7] | MAIERHOFER S, RETTINGER A K, MAYER E C, et al. Formalization of intersection traffic rules in temporal logic[C]. 2020 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2020: 752-759. |
| [8] | YU W, ZHAO C, WANG H, et al. Online legal driving behavior monitoring for self-driving vehicles[J]. Nature Communications, 2024, 15(1). |
| [9] | BECKER C, BREWER J C, YOUNT L. Safety of the intended functionality of lane-centering and lane-changing maneuvers of a generic level 3 highway chauffeur system[R]. National Highway Traffic Safety Administration, 2020. |
| [10] | JACOBO A, NOBUYUKI U, KUNIO Y, et al. Development of a safety assurance process for autonomous vehicles in Japan[C]. Proceedings of ESV Conference, 2019. |
| [11] | ZHAO D, HUANG X, PENG H, et al. Accelerated evaluation of automated vehicles in car-following maneuvers[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 19(3):733-744. |
| [12] | FENG S, FENG Y, YU C, et al. Testing scenario library generation for connected and automated vehicles, part I: methodology[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(3):1573-1582. |
| [13] | SUN J, ZHOU H, XI H, et al. Adaptive design of experiments for safety evaluation of automated vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(9):14497-14508. |
| [14] | DING W, CHEN B, LI B, et al. Multimodal safety-critical scenarios generation for decision-making algorithms evaluation[J]. IEEE Robotics and Automation Letters, 2021,6(2):1551-1558. |
| [15] | XIAO Y, ZHANG X, XU X, et al. Deep neural networks with Koopman operators for modeling and control of autonomous vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2022, 8(1): 135-146. |
| [16] | ISO. Road vehicles-scenario attributes and categorization: ISO 34504 [S]. 2018. |
| [17] | European Commission. Commission Implementing Regulation (EU) 2022/1426 of 5 August 2022 laying down rules for the application of Regulation (EU) 2019/2144 of the European Parliament and of the Council as regards uniform procedures and technical specifications for the type-approval of the automated driving system (ADS) of fully automated vehicles[Z]. Off. J. Eur. Union, 2022, 65(L221):1-64. |
| [18] | United Nations Economic Commission for Europe Geneva CH Regulation Addendum. New assessment/test method for automated driving (NATM) guidelines for validating automated driving system (ADS)[Z]. 2022. |
| [19] | United Nations Economic Commission for Europe Geneva CH Regulation Addendum. UN regulation No 157-Uniform provisions concerning the approval of vehicles with regards to automated lane keeping systems [Z]. 2022. |
| [20] | LI Y, WU S, et al. Adaptive mining of failure scenarios for autonomous driving systems based on multi-population genetic algorithm[C]. 2024 IEEE Intelligent Vehicles Symposium (IV), Jeju Island, Korea, Republic of, 2024: 2458-2464. |
| [21] | WU S, WANG H, et al. A new SOTIF scenario hierarchy and its critical test case generation based on potential risk assessment[C]. 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI), Beijing, China, 2021:399-409. |
| [22] | CHANG C, et al. MetaScenario: a framework for driving scenario data description, storage and indexing[J]. IEEE Transactions on Intelligent Vehicles, 2023,8(2): 1156-1175. |
| [23] | ISO. Road vehicles-engineering framework and process of scenario-based safety evaluation: ISO 34502 [S]. 2018. |
| [24] | GRUBER T R. A translation approach to portable ontology specifications[J]. Knowledge Acquisition,1993,5:199-220. |
| [25] | WAN L, WANG C, et al. Semantic consistency and correctness verification of digital traffic rules[J]. Engineering, 2024, 33:47-62. |
| [26] | 全国汽车标准化技术委员会. 汽车驾驶自动化分级: GB/T 40429—2021[S/OL]. [2024-10-10]. https://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=4754CB1B7AD798F288C52D |
| [1] | Bing Zhu,Rui Tang,Jian Zhao,Peixing Zhang,Wenxu Li,Jiasheng Li,Xuefeng Xu. Virtual Simulation Testing Method for Intelligent Vehicle Based on Large Language Model [J]. Automotive Engineering, 2025, 47(4): 587-597. |
| [2] | Bing Zhu,Tianxin Fan,Jian Zhao,Peixing Zhang,Dongjian Song,Yue Xue,Wenbo Zhao. Generation Method for Anthropomorphic Continuous Interactive Test Scenarios of Automated Driving [J]. Automotive Engineering, 2024, 46(9): 1600-1607. |
| [3] | Peixing Zhang,Kongjian Qin,Bing Zhu,Jian Zhao,Tianxin Fan,Wenbo Zhao. Comprehensive Evaluation Method for Automated Vehicle in Multiple Virtual Logical Scenarios [J]. Automotive Engineering, 2024, 46(3): 375-382. |
| [4] | Hang Sun,Yuran Li,Linlin Zhang,Yang Zhai,Zhenyu Chen,Chen Chen. Scenario Complexity Calculation Model of Real Road Test Based on Operational Design Condition [J]. Automotive Engineering, 2024, 46(11): 1983-1992. |
| [5] | Tianfei Ma,Bo Li,Bing Zhu,Jian Zhao. Ultrasonic Radar Modeling of Automatic Parking System Considering Atmospheric Conditions Effect [J]. Automotive Engineering, 2023, 45(9): 1646-1654. |
| [6] | Xinzheng Wu,Xingyu Xing,Lihao Liu,Yong Shen,Junyi Chen. Testing and Analysis of the Robustness of Decision-Making and Planning Systems Based on Fault Injection [J]. Automotive Engineering, 2023, 45(8): 1428-1437. |
| [7] | Yanli Ma,Jun Lu,Jieyu Zhu,Xiaoxue Han. Take-over Performance Prediction Under Different Cognitive Loads of Non-driving Tasks in Highly Automated Driving [J]. Automotive Engineering, 2023, 45(12): 2330-2337. |
| [8] | Hang Sun,Zhijun Li,Linlin Zhang,Zhenyu Chen,Shilong Li. Research on the Test and Evaluation Technique of Real Roads for Automated Driving Vehicles Based on OEDR and ODC [J]. Automotive Engineering, 2022, 44(6): 842-850. |
| [9] | Peixing Zhang,Bin Qiu,Bing Zhu,Jian Zhao,Yuhang Sun,Tianxin Fan. Study on Parallel Accelerated Testing Method for Automated Driving System [J]. Automotive Engineering, 2022, 44(2): 208-214. |
| [10] | Guangquan Lu,Facheng Chen,Penghui Li,Junda Zhai,Haitian Tan,Pengyun Zhao. Effect of Drivers’ Acceptance Level of Car⁃following Risk on the Takeover Performance [J]. Automotive Engineering, 2021, 43(6): 808-814. |
| [11] | Lin Qingfeng, Wang Zhaojie, Lu Guangquan. Takeover Safety Evaluation Model for Level 3 Automated Vehicles [J]. Automotive Engineering, 2019, 41(11): 1258-1264. |
|
||