汽车工程 ›› 2021, Vol. 43 ›› Issue (7): 1030-1036.doi: 10.19562/j.chinasae.qcgc.2021.07.010
白雪松1,邓伟文1,任秉韬1( ),刘鹏2,李江坤1,丁娟3
),刘鹏2,李江坤1,丁娟3
Xuesong Bai1,Weiwen Deng1,Bingtao Ren1(),Peng Liu2,Jiangkun Li1,Juan Ding3
摘要:
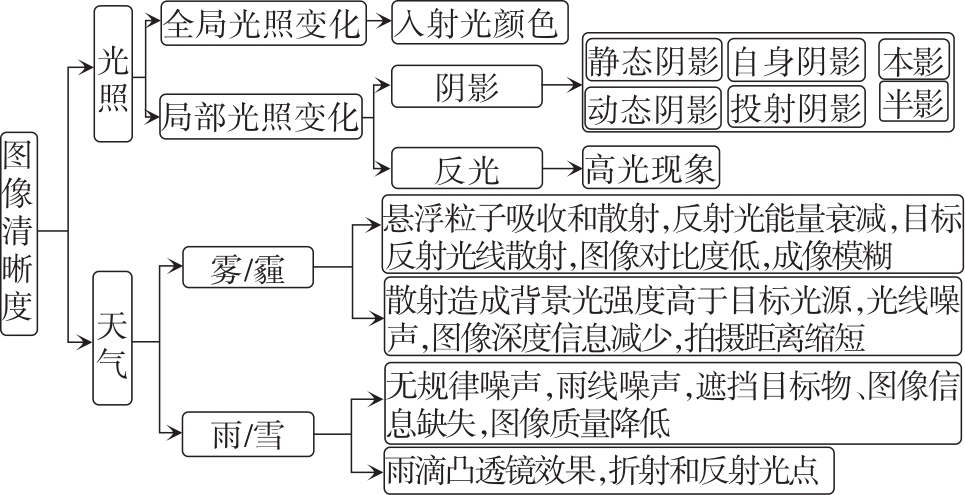
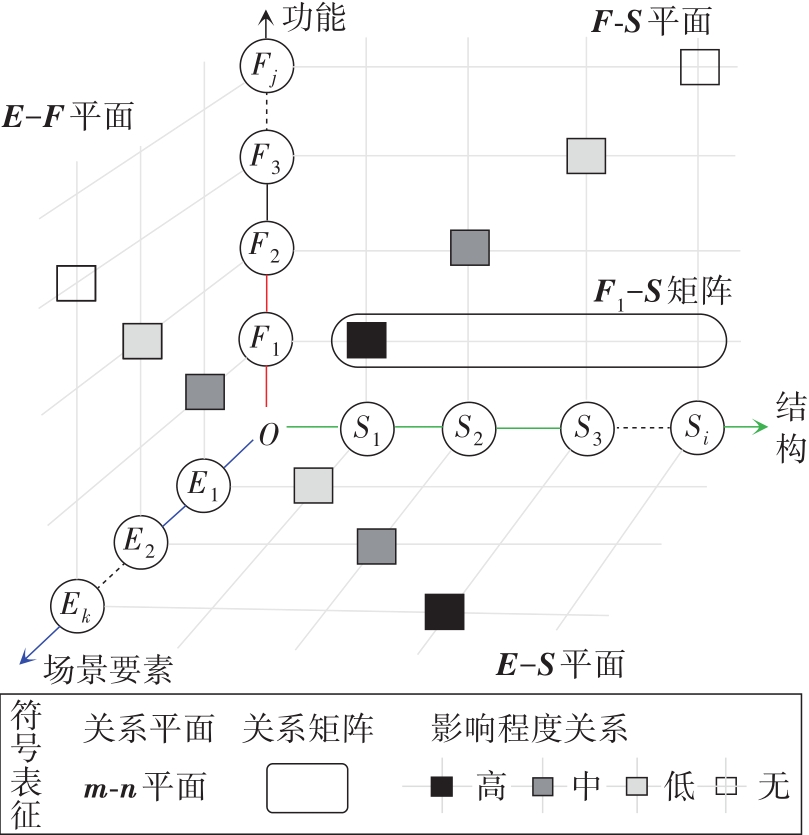
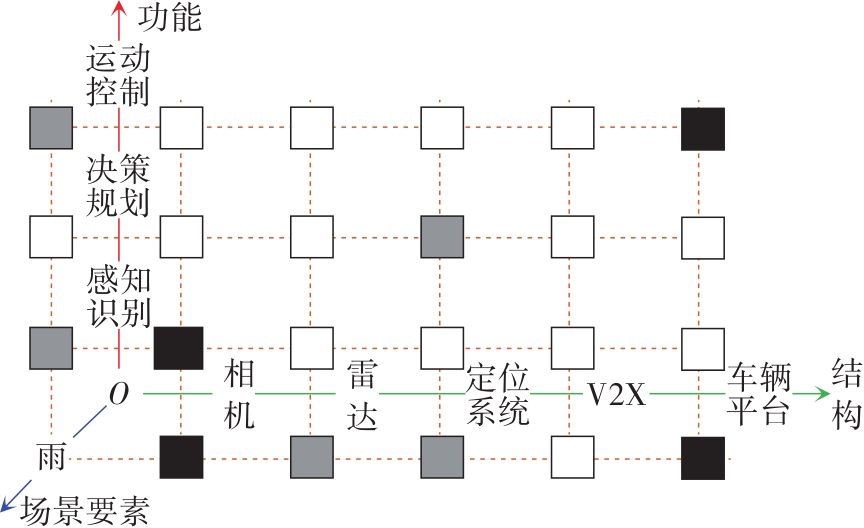
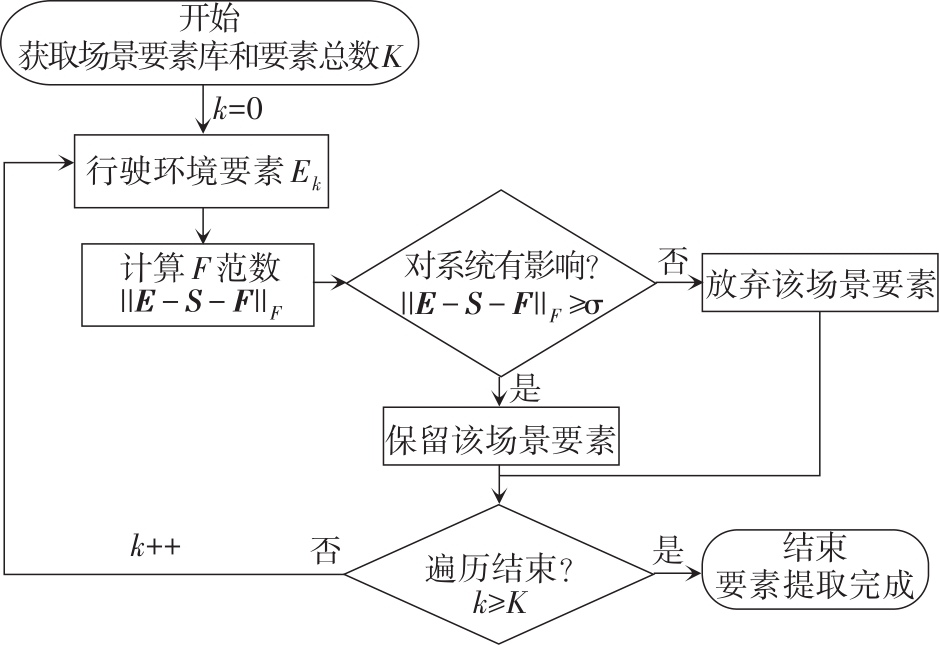
针对场景及其内容定义不明确、场景基本要素提取多为主观分析和不同测试主体的场景要素选择和设计不可解释等问题,本文中提出一种汽车自动驾驶仿真场景的关键要素提取方法。该方法从自动驾驶系统角度逐级分析场景要素对感知、决策和控制模块的影响,并根据对自动驾驶不同子模块的影响,建立为一种要素-结构-功能平面的映射方程,然后基于平面节点判别矩阵建立场景要素的提取模型,量化场景要素的重要性并进行判别和筛选。最后通过分析第四届世界智能驾驶仿真挑战赛的行人安全避撞场景的元素构成,验证了所提方法的可行性和有效性。