汽车工程 ›› 2022, Vol. 44 ›› Issue (2): 208-214.doi: 10.19562/j.chinasae.qcgc.2022.02.007
所属专题: 智能网联汽车技术专题-感知&HMI&测评2022年
张培兴1,邱彬2,3,朱冰1( ),赵健1,孙宇航1,范天昕1
),赵健1,孙宇航1,范天昕1
Peixing Zhang1,Bin Qiu2,3,Bing Zhu1(),Jian Zhao1,Yuhang Sun1,Tianxin Fan1
摘要:
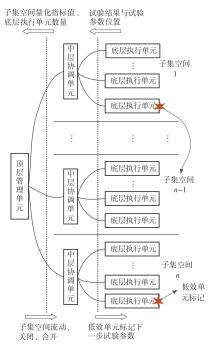
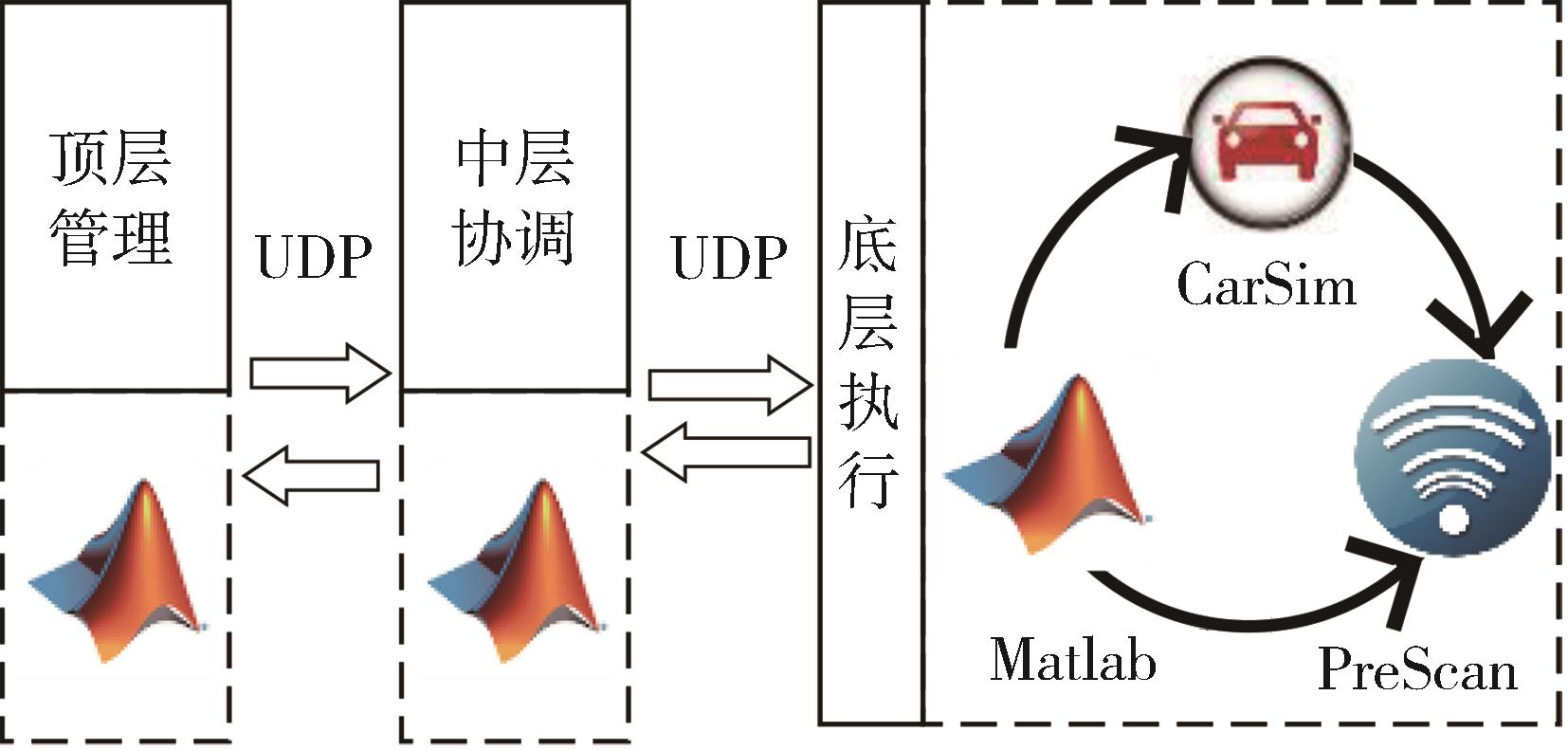
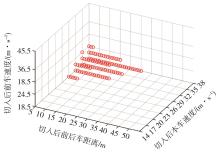
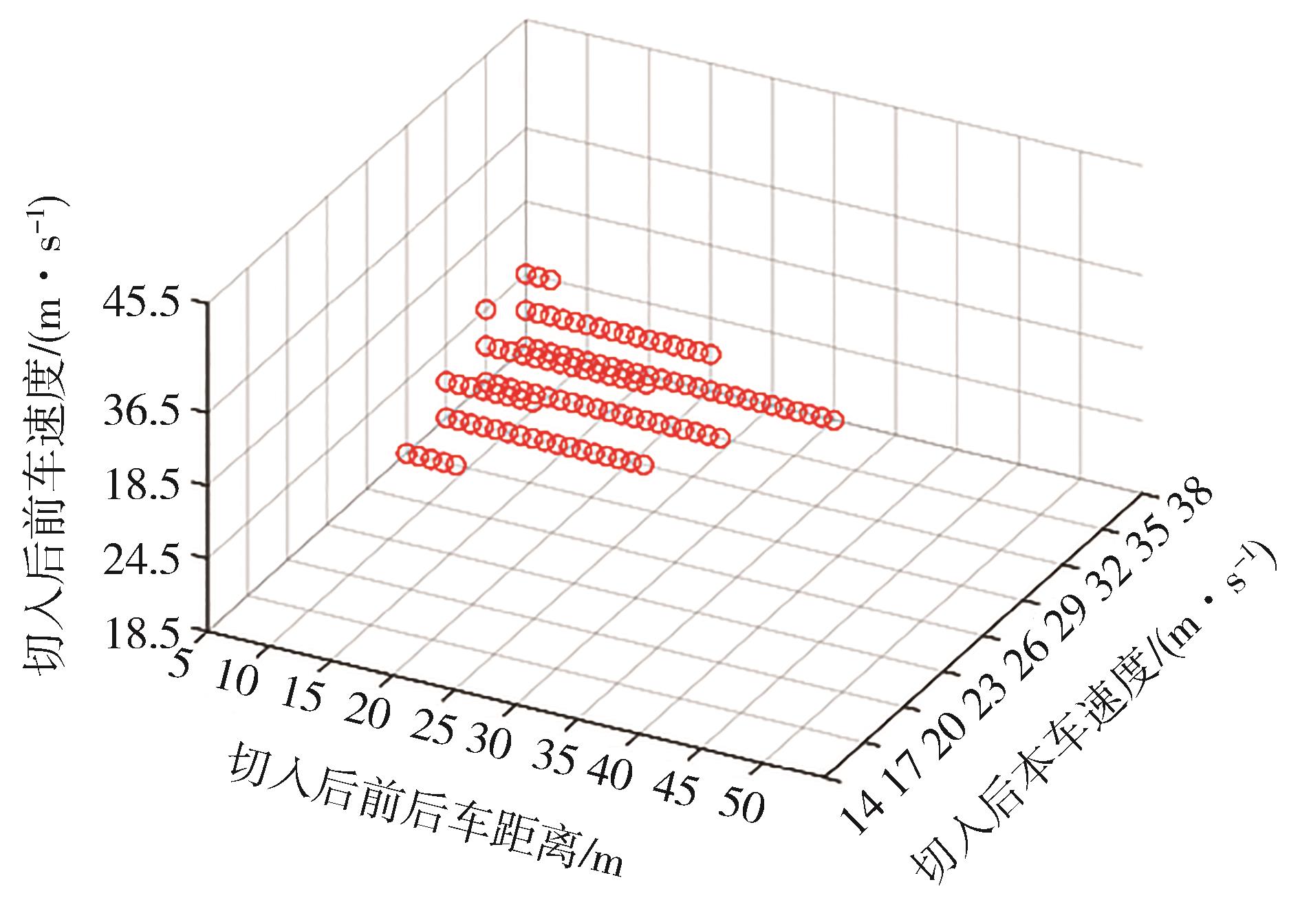
为提高作为自动驾驶系统安全性验证手段的场景测试的效率,本文中提出了一种自动驾驶系统并行加速测试方法。首先根据自动驾驶系统测试需求,构建了由顶层管理层、中层协调层和底层执行层构成的3层加速测试架构。然后确定不同层级的具体任务:顶层管理单元流动,中层协调参数计算,底层执行试验运行。最后以前车切入场景为例,对某黑盒自动驾驶算法分别使用并行加速、并行遍历、单线程加速和单线程遍历4种方式进行对比测试。结果表明,在测试具体场景总数为4 590的情况下,4种方式均发现所有危险场景,但其耗时差别悬殊,分别为1.3、5.7、22.4和96.2 h。说明本文提出的并行加速测试方法可有效、快速地发现参数空间中的危险场景,提高自动驾驶系统测试效率。