汽车工程 ›› 2023, Vol. 45 ›› Issue (7): 1174-1183.doi: 10.19562/j.chinasae.qcgc.2023.07.008
所属专题: 智能网联汽车技术专题-规划&决策2023年
李军1,2( ),周伟1,2,唐爽1,2
),周伟1,2,唐爽1,2
收稿日期:2022-12-16
修回日期:2023-01-17
出版日期:2023-07-25
发布日期:2023-07-25
通讯作者:
李军
E-mail:cqleejun@163.com
基金资助:
Jun Li1,2(),Wei Zhou1,2,Shuang Tang1,2
Received:2022-12-16
Revised:2023-01-17
Online:2023-07-25
Published:2023-07-25
Contact:
Jun Li
E-mail:cqleejun@163.com
摘要:
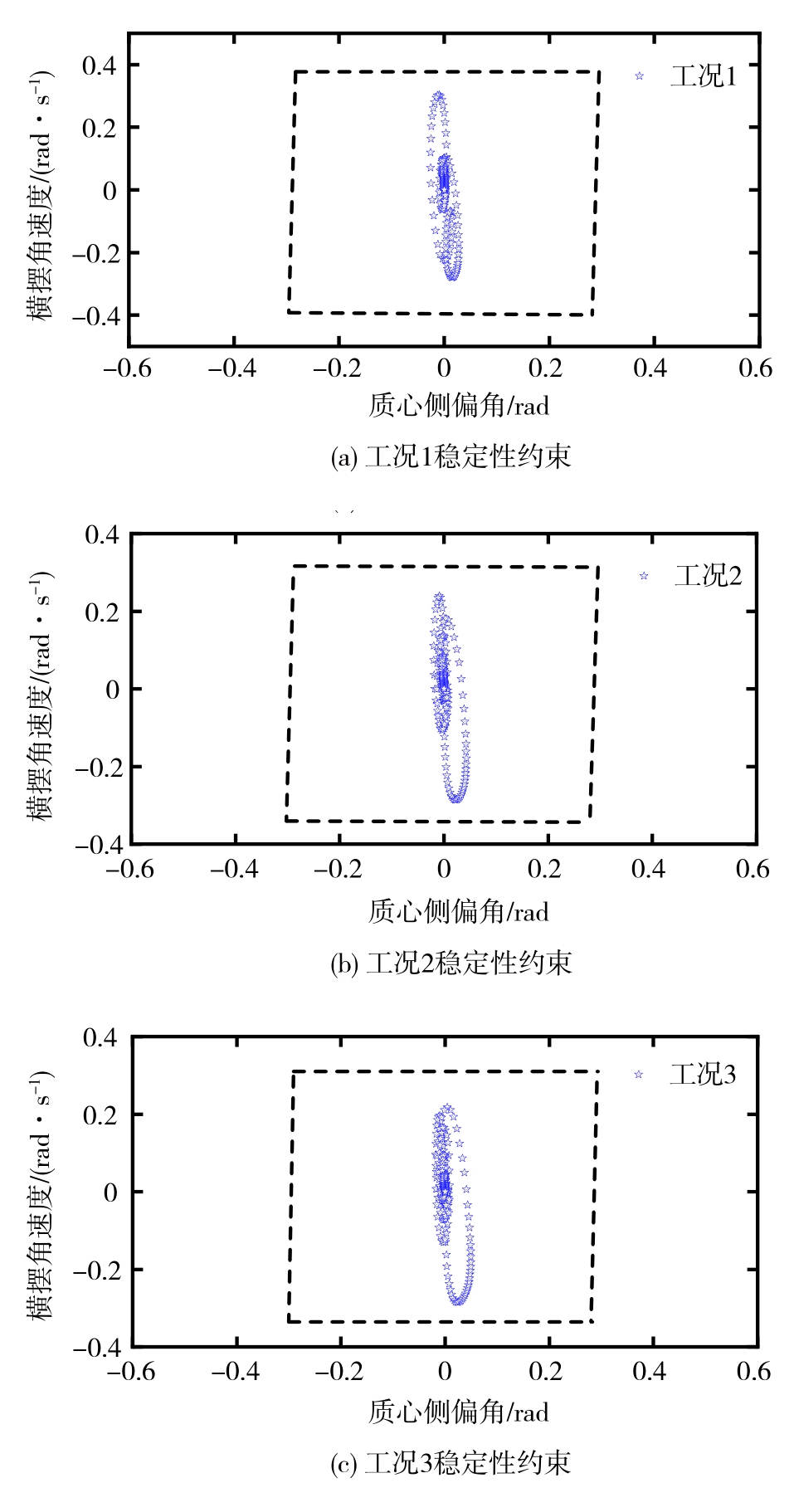
研究动态环境下的自动驾驶车辆换道避障模型预测轨迹规划。首先定义坐标系及动态换道避障场景,确定车辆换道避障轨迹规划的行驶约束条件,搭建被控车辆和障碍物车辆模型;然后设计自适应分段贝塞尔曲线拟合算法用以拟合换道避障轨迹规划的离散点序列;进一步采用模型预测控制算法,设计自动驾驶车辆换道避障轨迹规划方法。最后,对动态环境下自动驾驶车辆换道避障模型预测轨迹规划进行仿真分析,结果表明:本文的换道避障轨迹规划方案能够使被控车辆在动态环境下完成障碍物的规避并保持稳定状态;所设计的自适应分段贝塞尔曲线拟合算法拟合轨迹连续且光滑,换道避障轨迹规划提供的离散点序列与贝塞尔曲线对应点的拟合残差保持在设定阈值内。
李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183.
Jun Li, Wei Zhou, Shuang Tang. Lane Change and Obstacle Avoidance Trajectory Planning of Intelligent Vehicle Based on Adaptive Fitting[J]. Automotive Engineering, 2023, 45(7): 1174-1183.
图1
坐标系及换道避障场景"
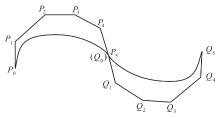
图2
贝塞尔曲线拼接示意图"
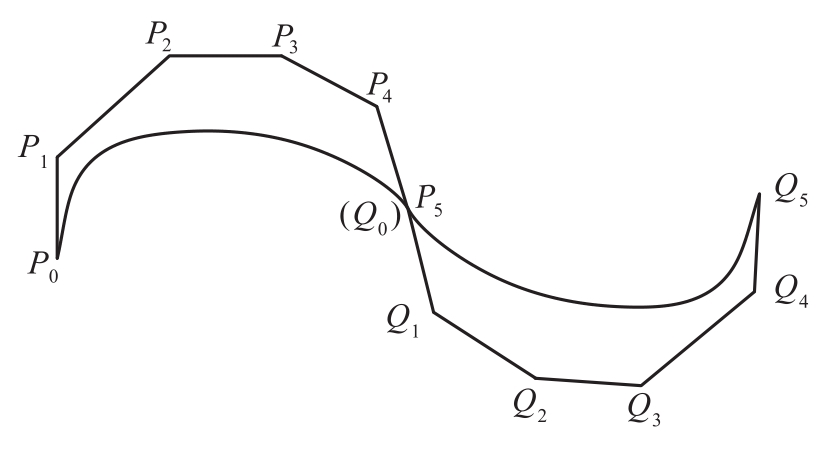
图3
轨迹自适应拟合流程"
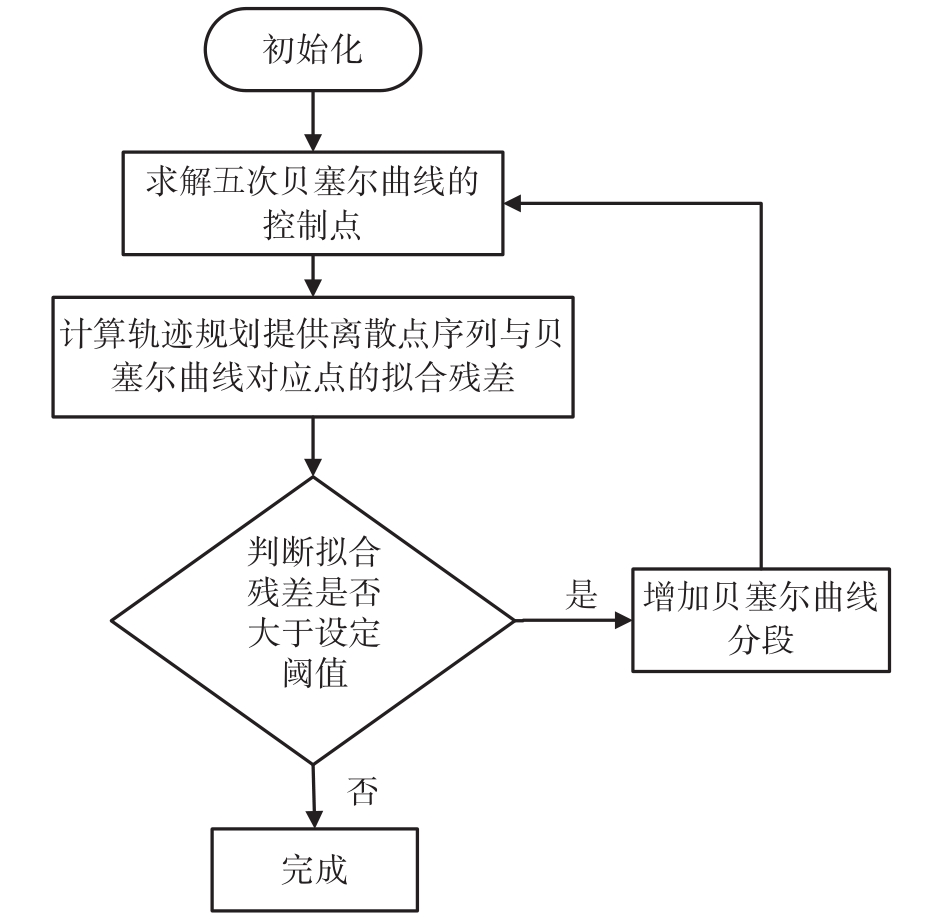
图4
稳定性约束包络示意图"
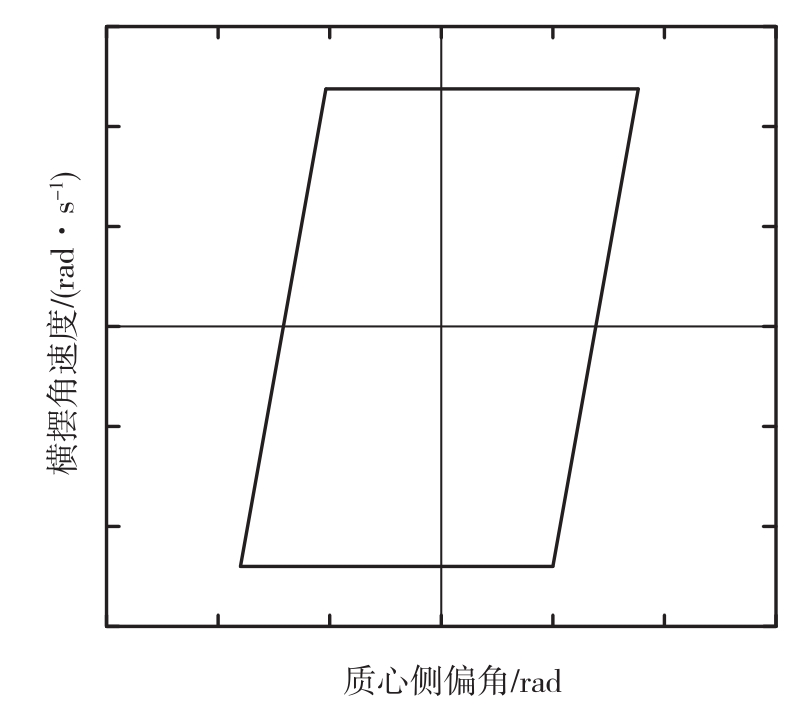
表1
车辆模型基本参数"
| 参数 | 数值 |
|---|---|
| 质量m/kg | 1 723 |
| 车辆绕z轴转动惯量Iz /(kg·m2) | 4 175 |
| 车辆绕x轴转动惯量Ix /(kg·m2) | 1 243 |
| 重力加速度g/(m·s-2) | 9.8 |
| 前轴到质心的距离a/m | 1.232 |
| 后轴到质心的距离b/m | 1.468 |
| 前轮等效侧偏刚度Cαf/( N·rad-1) | 66 900 |
| 后轮等效侧偏刚度Cαr/ ( N·rad-1) | 62 700 |
| 车身长度L/m | 4 |
| 车身宽度W/m | 1.988 |
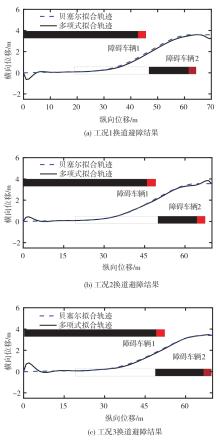
图5
方案A在不同工况下换道避障轨迹规划结果"
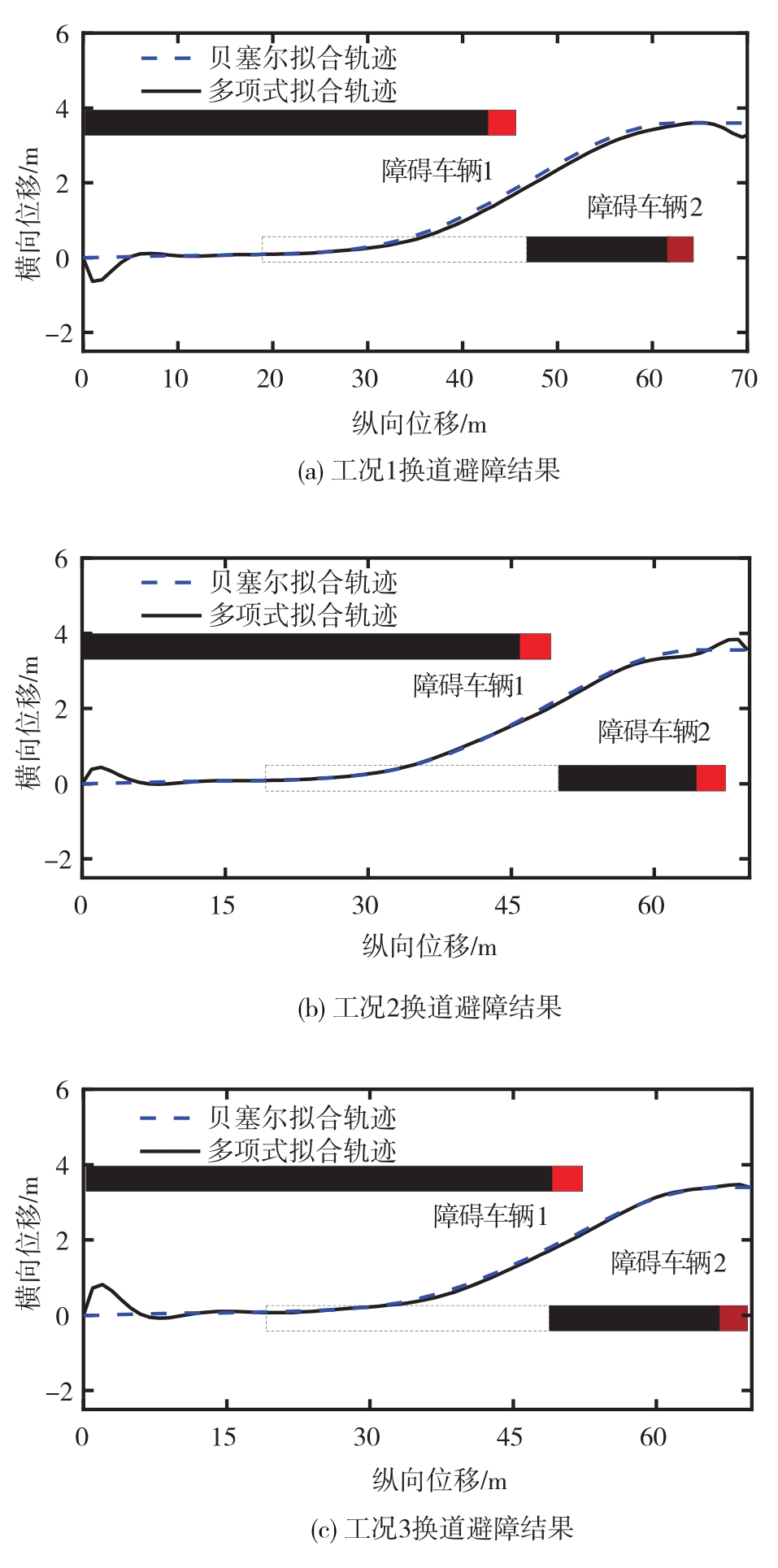

图6
方案B不同工况下换道避障轨迹规划结果"
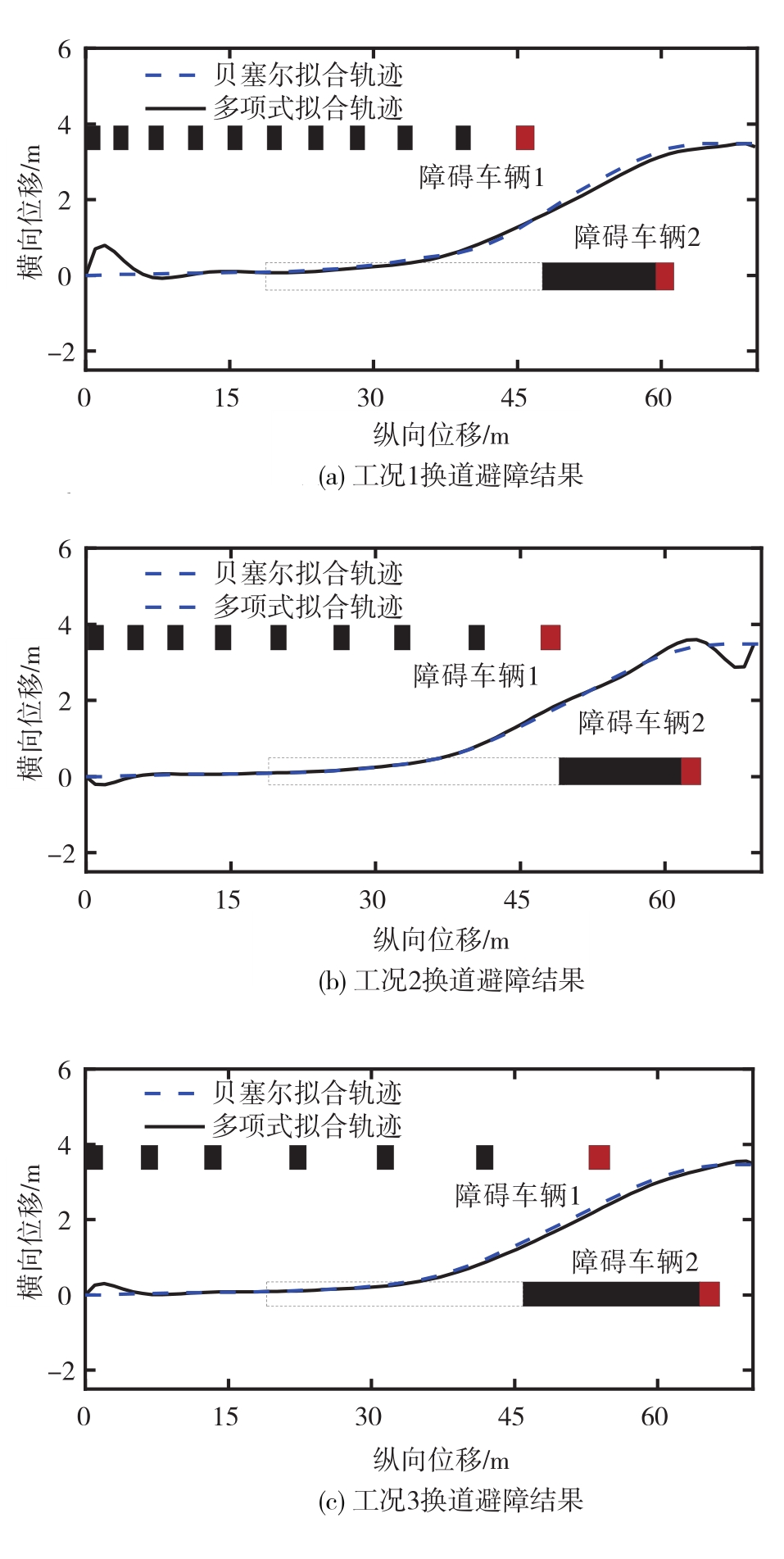

图7
方案A在不同工况下换道避障轨迹拟合残差"
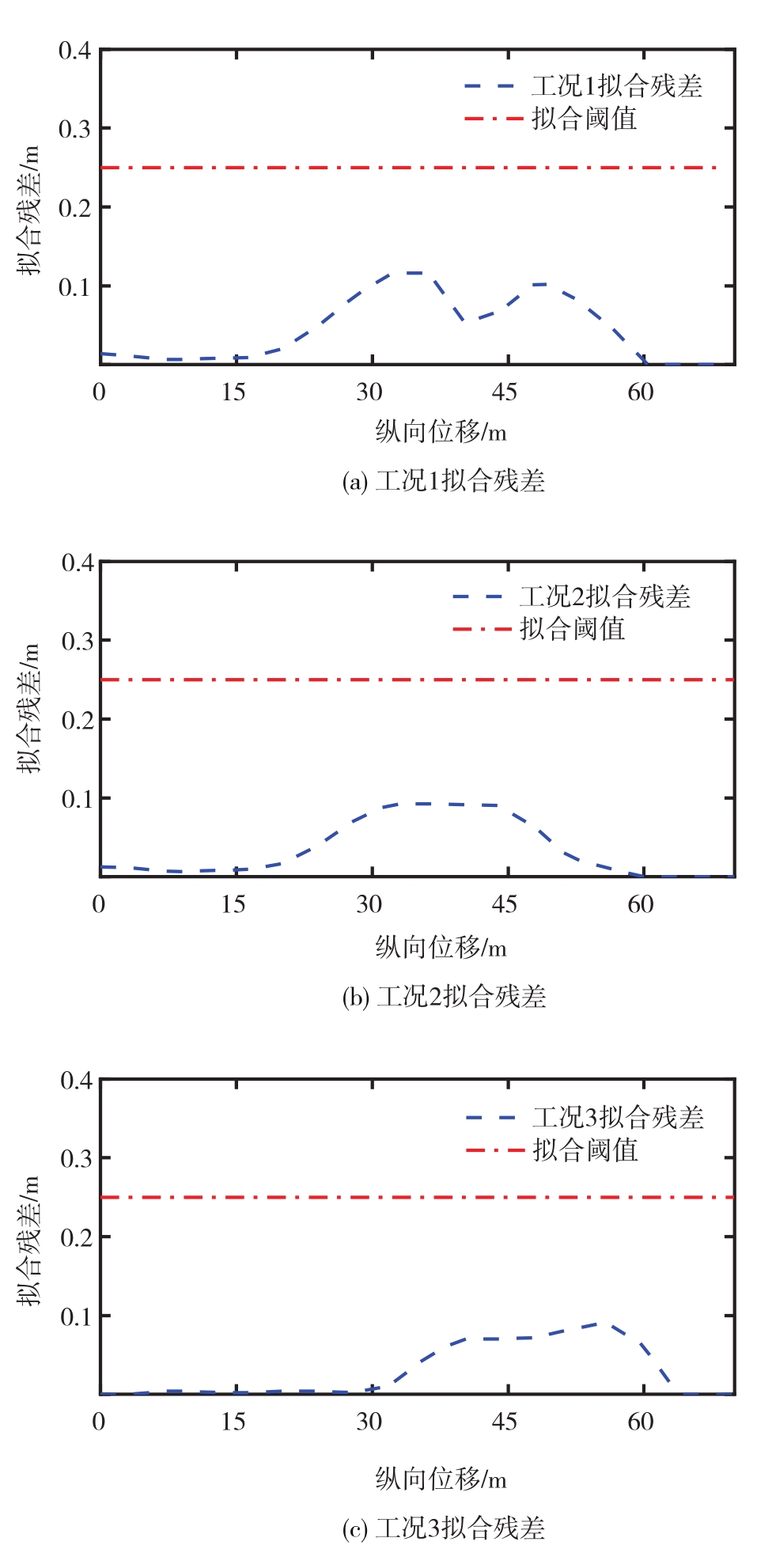

图8
方案B在不同工况下换道避障轨迹拟合残差"
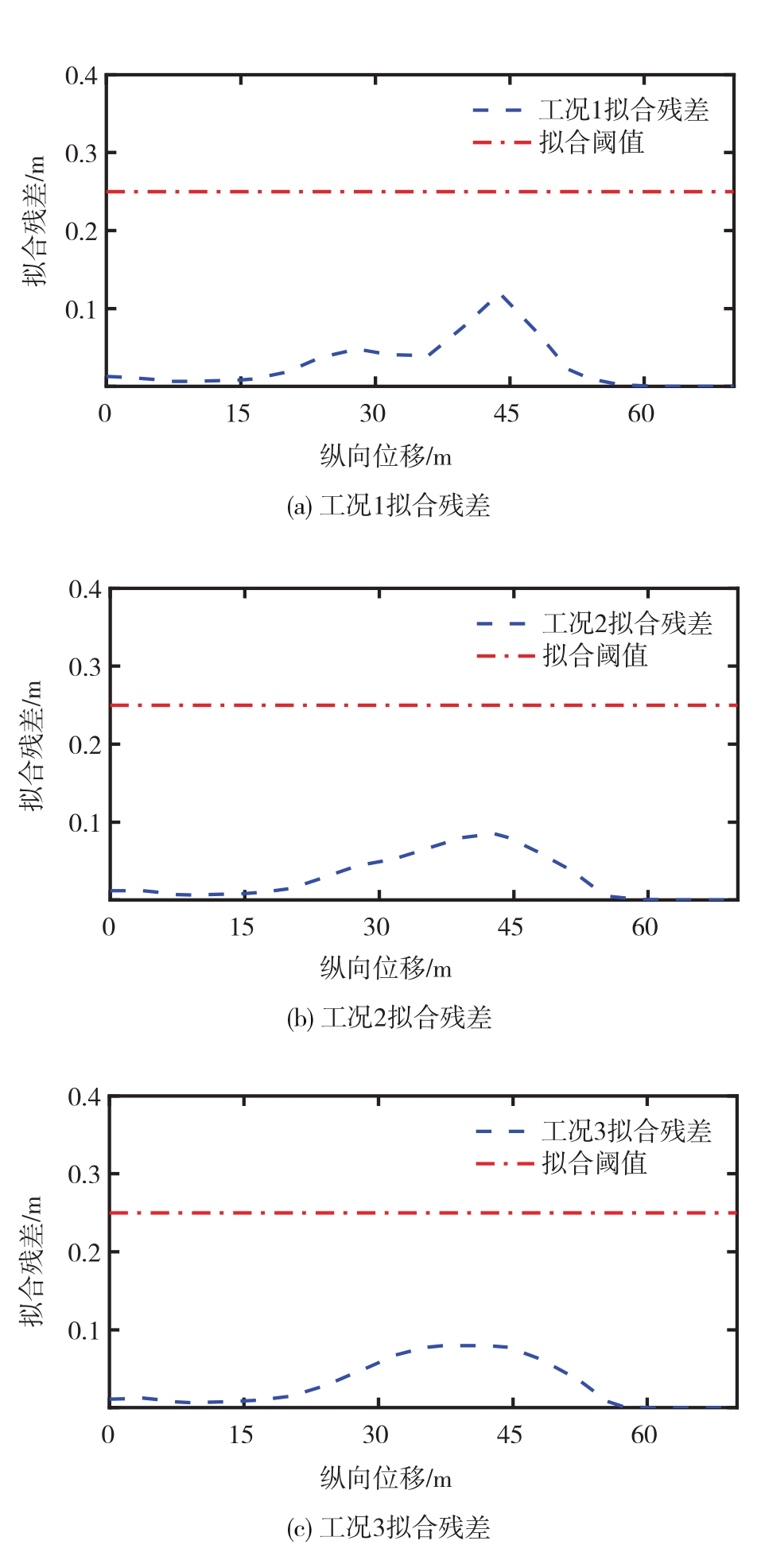

图9
方案A在不同工况下换道避障轨迹规划的前轮转角、横向加速度和轮胎侧偏角"


图10
方案B在不同工况下换道避障轨迹规划的前轮转角、横向加速度和轮胎侧偏角"
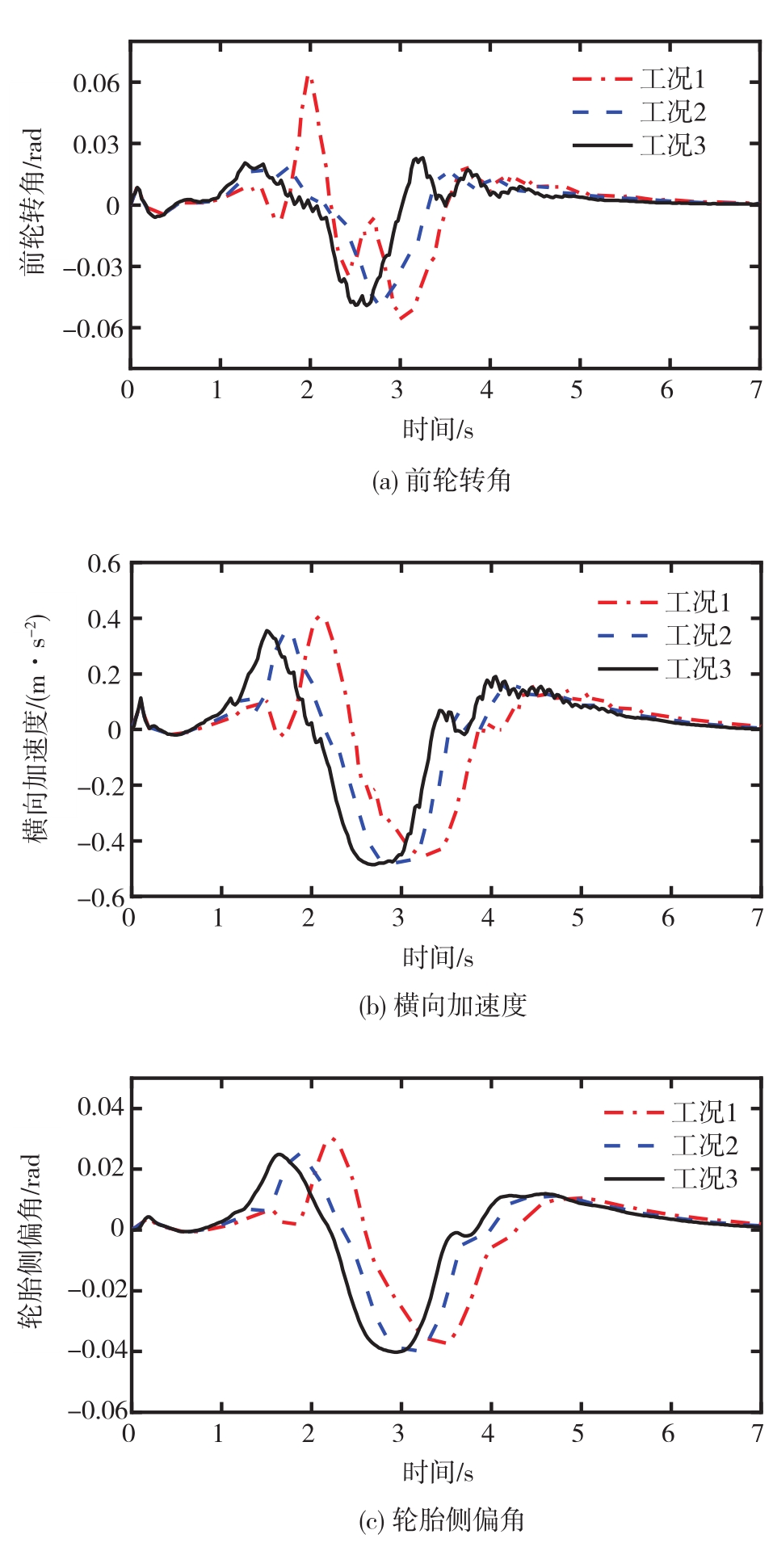

图11
方案A在不同工况下的稳定性约束验证"
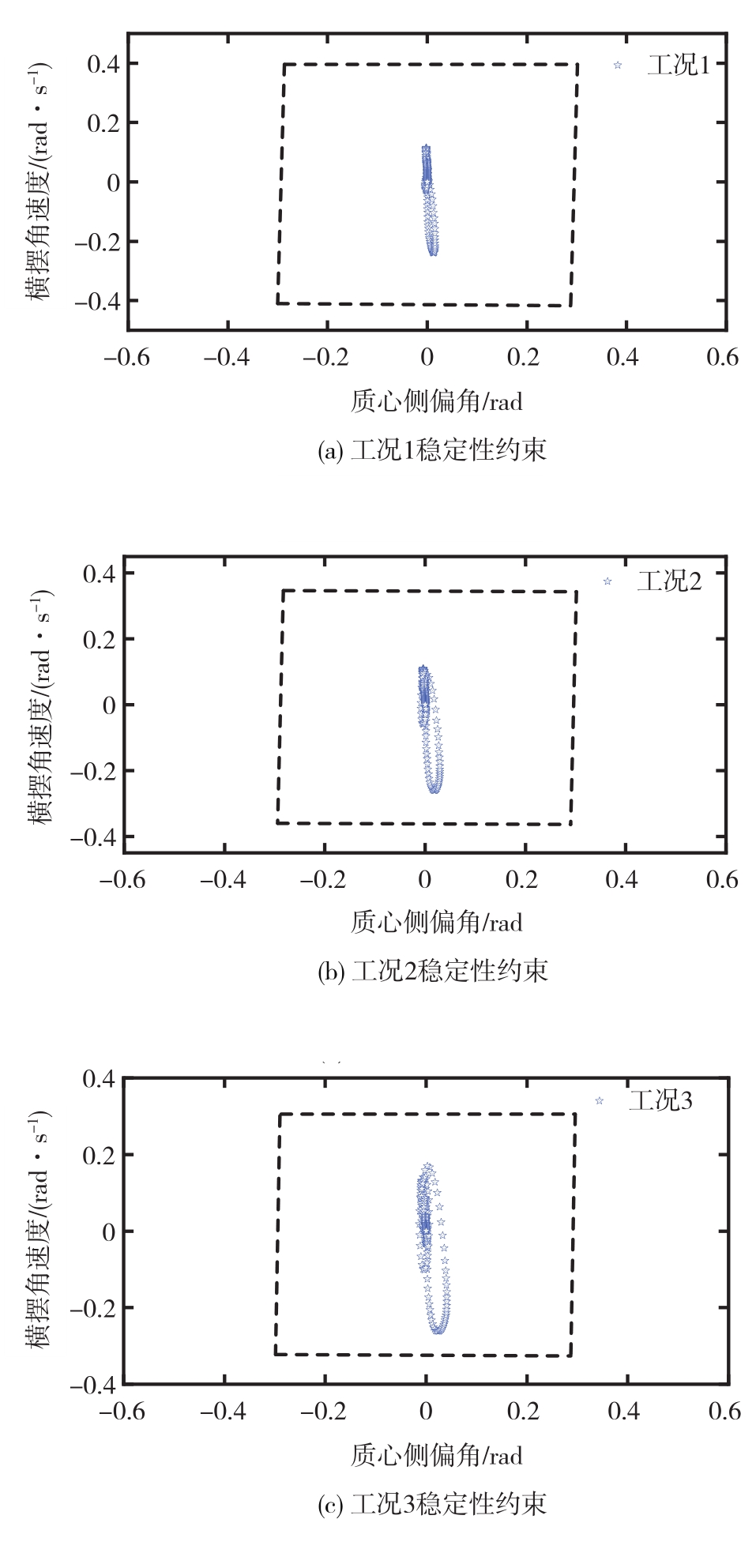

图12
方案B在不同工况下的稳定性约束验证"
| 1 | JI J, KHAJEPOUR A, MELEK W W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J]. IEEE Transactions on Vehicular Technology, 2016, 66(2): 952-964. |
| 2 | 龚建伟,刘凯,齐建永.无人驾驶车辆模型预测控制[M]. 北京:北京理工大学出版社,2020. |
| GONG Jianwei, LIU Kai, QI Jianyong. Model predictive control for self-driving vehicles [M]. Beijing:Beijing Institute of Tech⁃nology Press, 2020. | |
| 3 | CHOI Y, LIM K, KIM J, et al. Lane change and path planning of autonomous vehicles using GIS[C]. International Conference on Ubiquitous Robots & Ambient Intelligence, IEEE,2015:163-166. |
| 4 | KUWATA Y, KARAMAN S, TEO J, et al. Real-time motion planning with applications to autonomous urban driving[J]. IEEE Transactions on Control Systems Technology, 2009, 7(5):1105-1118. |
| 5 | ZHU D, SUN J. A new algorithm based on dijkstra for vehicle path planning considering intersection attribute[J]. IEEE Access, 2021, 9: 19761-19775. |
| 6 | HUANG Y, DING H, ZHANG Y, et al. A motion planning and tracking framework for autonomous vehicles based on artificial po⁃tential field elaborated resistance network approach[J]. IEEE Transactions on Industrial Electronics, 2019,67(2):1376-1386. |
| 7 | ABBAS M A, MILMAN R, EKLUND J M. Obstacle avoidance in real time with nonlinear model predictive control of autonomous vehicles[J]. Canadian Journal of Electrical and Computer Engineering, 2017, 40(1): 12-22. |
| 8 | YU H, GONG J, IAGNEMMA K, et al. Robotic wheeled vehicle ripple tentacles motion planning method[C]. 2012IEEE Intelligent Vehicles Symposium. IEEE, 2012: 1156-1161. |
| 9 | ZHAO Z, LIU H, CHEN H, et al. Kinematics-aware model predictive control for autonomous high-speed tracked vehicles under the off-road conditions[J]. Mechanical Systems and Signal Processing, 2019, 123: 333-350. |
| 10 | LIU K, GONG J, KURT A, et al. A model predictive-based approach for longitudinal control in autonomous driving with lateral interruptions[C]. 2017 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2017: 359-364. |
| 11 | 李军, 唐爽, 黄志祥, 等. 融合稳定性的高速无人驾驶车辆纵横向协调控制方法[J].交通运输工程学报,2020,20(2):205-218. |
| LI Jun, TANG Shuang, HUANG Zhixiang, et al. Vertical and horizontal coordination control method for high-speed unmanned vehicles with integrated stability [J]. Chinese Journal of Transportation Engineering, 2020, 20(2): 205-218. | |
| 12 | LIU J C, JAYAKUMAR P, STEIN J L, et al. A study on model fidelity for model predictive control-based obstacle avoidance in high-speed autonomous ground vehicles[J]. Vehicle System Dynamics, 2016, 54(11): 1629-1650. |
| 13 | LIU J C, JAYAKUMAR P, STEIN J L, et al. A nonlinear model predictive control formulation for obstacle avoidance in high-speed autonomous ground vehicles in unstructured environments[J]. Vehicle System Dynamics, 2018, 56(6): 853-882. |
| 14 | BALACHANDRAN A, BROWN M, ERLIEN S M, et al. Predictive haptic feedback for obstacle avoidance based on model predictive control[J]. IEEE Transactions on Automation Science and Engineering, 2015, 13(1): 26-31. |
| 15 | KIM J C, PAE D S, LIM M T. Obstacle avoidance path planning based on output constrained model predictive control[J]. International Journal of Control, Automation and Systems, 2019, 17(11): 2850-2861. |
| 16 | YOON Y S, SHIN J H, KIM H J, et al. Model-predictive active steering and obstacle avoidance for autonomous ground vehicles[J]. Control Engineering Practice, 2009, 17(7): 741-750. |
| 17 | KIM E, KIM J, SUNWOO M. Model predictive control strategy for smooth path tracking of autonomous vehicles with steering actuator dynamics[J]. International Journal of Automotive Technology, 2014, 15(7): 1155-1164. |
| 18 | RAFFO G V, GOMES G K, NORMEY-RICO J E, et al. A predictive controller for autonomous vehicle path tracking[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(1): 92-102. |
| 19 | FRANZÈ G, LUCIA W. An obstacle avoidance model predictive control scheme for mobile robots subject to nonholonomic constraints: a sum-of-squares approach[J]. Journal of the Franklin Institute, 2015, 352(6): 2358-2380. |
| 20 | STASTNY T J, GARCIA G A, KESHMIRI S S. Collision and obstacle avoidance in unmanned aerial systems using morphing potential field navigation and nonlinear model predictive control[J]. Journal of Dynamic Systems, Measurement, and Control, 2015, 137(1). |
| 21 | BEAL C E, GERDES J C. Model predictive control for vehicle stabilization at the limits of handling [J]. IEEE Transactions on Control Systems Technology, 2012, 21(4): 1258-1269. |
| 22 | HU C, ZHAO L, CAO L, et al. Steering control based on model predictive control for obstacle avoidance of unmanned ground vehicle[J]. Measurement and Control, 2020, 53(3-4): 501-518. |
| 23 | WANG Z, LI G, JIANG H, et al. Collision-free navigation of autonomous vehicles using convex quadratic programming-based model predictive control [J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(3): 1103-1113. |
| 24 | GAO Y L, LIN T, BORRELLI F, et al. Predictive control of autonomous ground vehicles with obstacle avoidance on slippery roads[C]. Dynamic Systems and Control Conference, 2010, 44175: 265-272. |
| 25 | LIU J, JAYAKUMAR P, STEIN J L, et al. Combined speed and steering control in high-speed autonomous ground vehicles for obstacle avoidance using model predictive control[J]. IEEE Transactions on Vehicular Technology, 2017, 66(10): 8746-8763. |
| 26 | LI X, YANG Y, WANG J. Active vehicle obstacle avoidance based on integrated horizontal and vertical control strategy[J]. Automatika, 2020, 61(3): 448-460. |
| 27 | PARK J M, KIM D W, YOON Y S, et al. Obstacle avoidance of autonomous vehicles based on model predictive control[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2009, 223(12): 1499-1516. |
| 28 | BROWN M, FUNKE J, ERLIEN S, et al. Safe driving envelopes for path tracking in autonomous vehicles[J]. Control Engineering Practice, 2017, 61: 307-316. |
| [1] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [2] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [3] | 林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111. |
| [4] | 查云飞,吕小龙,陈慧勤,易迎春,王燕燕. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021. |
| [5] | 贺伊琳,马建,杨舒凯,郑威,薛启帆. 融合预瞄特性的智能电动汽车稳定性模型预测控制研究[J]. 汽车工程, 2023, 45(5): 719-734. |
| [6] | 周兵,魏佳宝,柴天,吴晓建,王鹤. 基于最优方法的碰后辅助驾驶控制策略[J]. 汽车工程, 2023, 45(4): 561-571. |
| [7] | 张彬,邹渊,张旭东,孙逢春,吴喆,孟逸豪. 混动履带式无人平台轨迹跟踪控制研究[J]. 汽车工程, 2023, 45(4): 579-587. |
| [8] | 张紫微,郑玲,李以农,乔旭强,郑浩,王戡. 考虑前车运动不确定性的多目标自适应巡航控制[J]. 汽车工程, 2023, 45(3): 361-371. |
| [9] | 张新荣,谭宇航,贾一帆,黄晋,许权宁. 四轮独立驱动电动汽车路径跟踪鲁棒控制[J]. 汽车工程, 2023, 45(2): 253-262. |
| [10] | 贺林,徐子昂,黄春荣,龚超,李书华,石琴. 线控转向系统转角预测滑模控制算法研究[J]. 汽车工程, 2023, 45(12): 2200-2208. |
| [11] | 吕颖,祁旭,刘秋铮,王鑫煜,陈国迎. 考虑转向延迟特性的自动驾驶车辆路径跟踪控制方法[J]. 汽车工程, 2023, 45(12): 2234-2241. |
| [12] | 胡丹丹,尹鹏飞,牛国臣,赵金聚. 非结构化道路下离轴式拖挂车辆主动避障控制研究[J]. 汽车工程, 2023, 45(12): 2318-2329. |
| [13] | 宋强,王冠峰,商赫,张念忠. 基于多参数控制的分布式驱动电动汽车操纵稳定性控制策略研究[J]. 汽车工程, 2023, 45(11): 2104-2112. |
| [14] | 芦勇,何一超,田贺,江昆,杨殿阁. 面向量产的自适应巡航控制系统纵向加速度规划方法研究[J]. 汽车工程, 2023, 45(10): 1803-1814. |
| [15] | 兰凤崇,刘迎节,陈吉清,刘照麟. 基于动态博弈算法的切入场景下自动驾驶车辆运动规划研究[J]. 汽车工程, 2023, 45(1): 9-19. |
|