汽车工程 ›› 2023, Vol. 45 ›› Issue (7): 1099-1111.doi: 10.19562/j.chinasae.qcgc.2023.07.001
所属专题: 智能网联汽车技术专题-规划&决策2023年
• 专题:汽车智能化关键技术 • 下一篇
林程1,汪博文1,吕沛原1,宫新乐1,2( ),于潇1
),于潇1
收稿日期:2023-01-03
修回日期:2023-02-05
出版日期:2023-07-25
发布日期:2023-07-25
通讯作者:
宫新乐
E-mail:Xinlegong@gmail.com
基金资助:
Cheng Lin1,Bowen Wang1,Lü Peiyuan1,Xinle Gong1,2(),Xiao Yu1
Received:2023-01-03
Revised:2023-02-05
Online:2023-07-25
Published:2023-07-25
Contact:
Xinle Gong
E-mail:Xinlegong@gmail.com
摘要:
当多辆自动驾驶车辆在结构化道路上执行换道合流任务时,需要综合考虑转向和合流动作以避免事故的发生,同时曲率和周车车速的变化也增大了协同控制的难度。本文聚焦上述问题,提出了面向变曲率道路的多车换道博弈运动规划与协同控制方法。首先,建立曲率坐标系下的多车模型来解析车间安全距离及动力学状态。其次,通过系统地考虑道路曲率变化及周围车辆信息,提出基于博弈的多车换道运动规划算法,采用分布式框架快速求解兼顾个性化驾驶的最优速度轨迹及换道时机。最后,基于B样条曲线高效识别道路曲率及规划轨迹,构建了自适应时变预测控制算法实现轨迹跟踪,其特点在于单步参数矩阵实时更新,消除车速和曲率频繁变化带来的控制偏差累积。实验结果表明,相比斯坦利(Stanley)方法,能降低58%的跟踪误差;相较协同自适应巡航方法,能减少74%的合流时间;另外计算求解效率也仅为集中式模型预测控制方法的10%。
林程, 汪博文, 吕沛原, 宫新乐, 于潇. 面向变曲率道路的自动驾驶汽车换道博弈运动规划与协同控制研究[J]. 汽车工程, 2023, 45(7): 1099-1111.
Cheng Lin, Bowen Wang, Lü Peiyuan, Xinle Gong, Xiao Yu. Research on Motion Planning and Cooperative Control for Autonomous Vehicles with Lane Change Gaming Maneuvers Under the Curved Road[J]. Automotive Engineering, 2023, 45(7): 1099-1111.
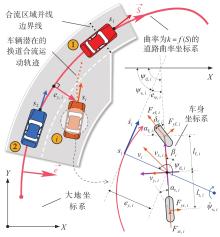
图1
不同坐标系之间的车辆状态关系"
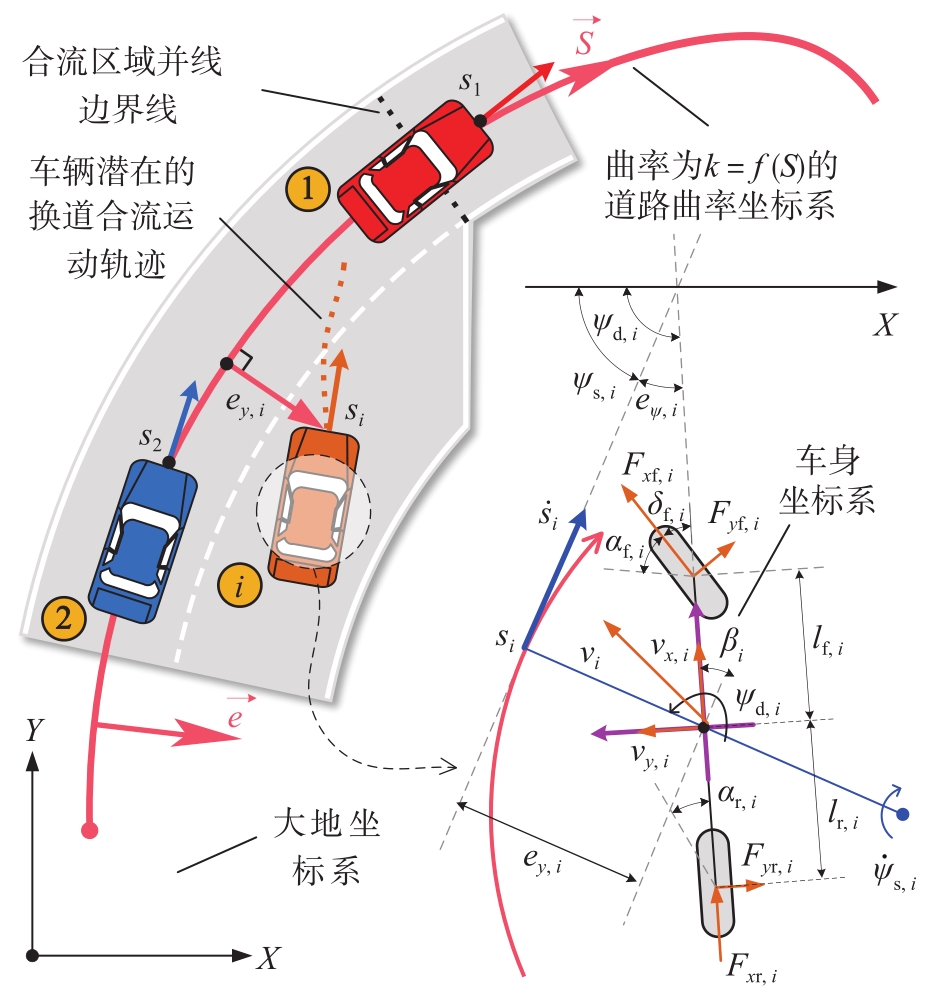
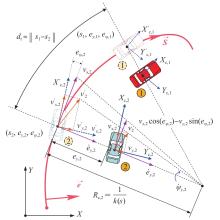
图2
曲率坐标下车间相对位置关系"
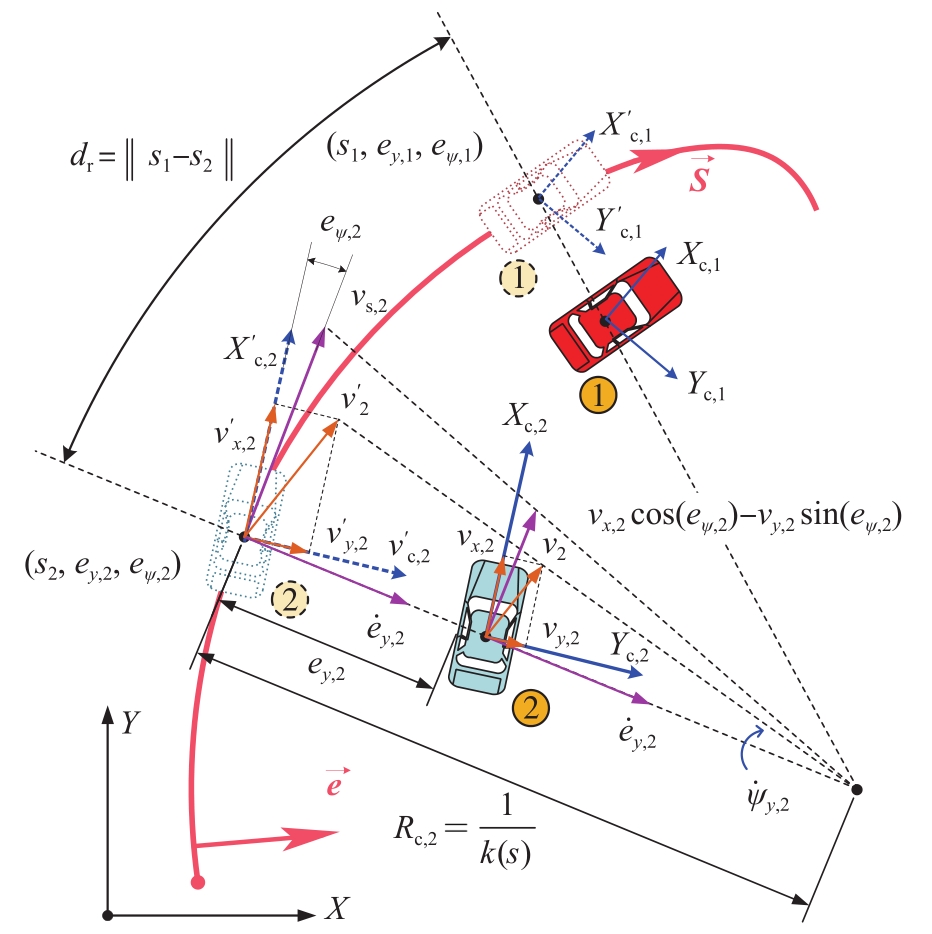
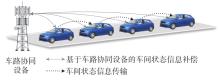
图3
通信拓扑示意"
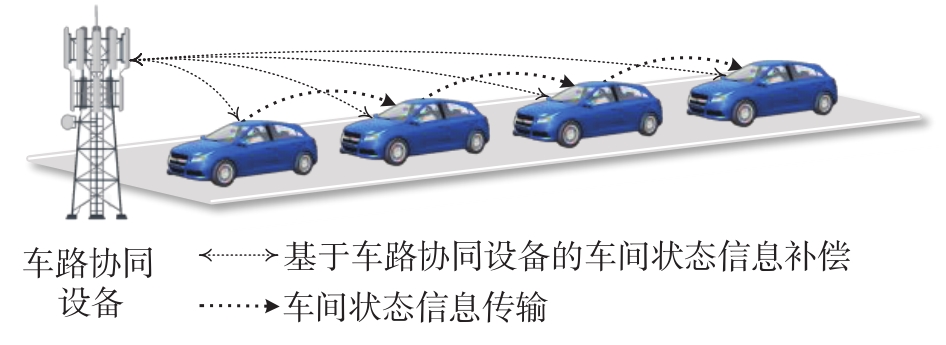
表1
算法1:多车分布式速度博弈与换道时机计算"
| 输入:系统虚拟队列下的车辆状态 | |
|---|---|
| 输出:纳什均衡策略 | |
| 1. | 初始化换道时刻 |
| 2. | while 车辆节点 |
| 3. | 虚拟队列构型下选择前方距离最近的车辆节点 |
| 4. | 得到控制策略序列 |
| 5. | 根据 |
| 6. | |
| 7. | If |
| 8. | 换道时刻 |
| 9. | end |
| 10. | 策略集合更新 |
| 11. | end |
图4
曲率识别和路径规划示意"
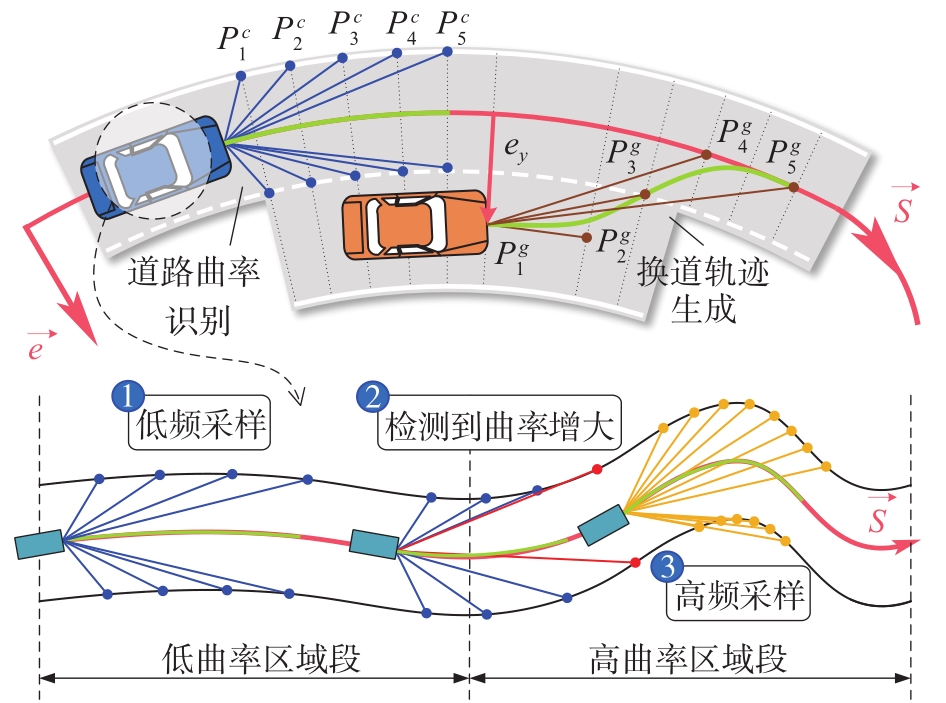

图5
自适应时变预测算法流程"
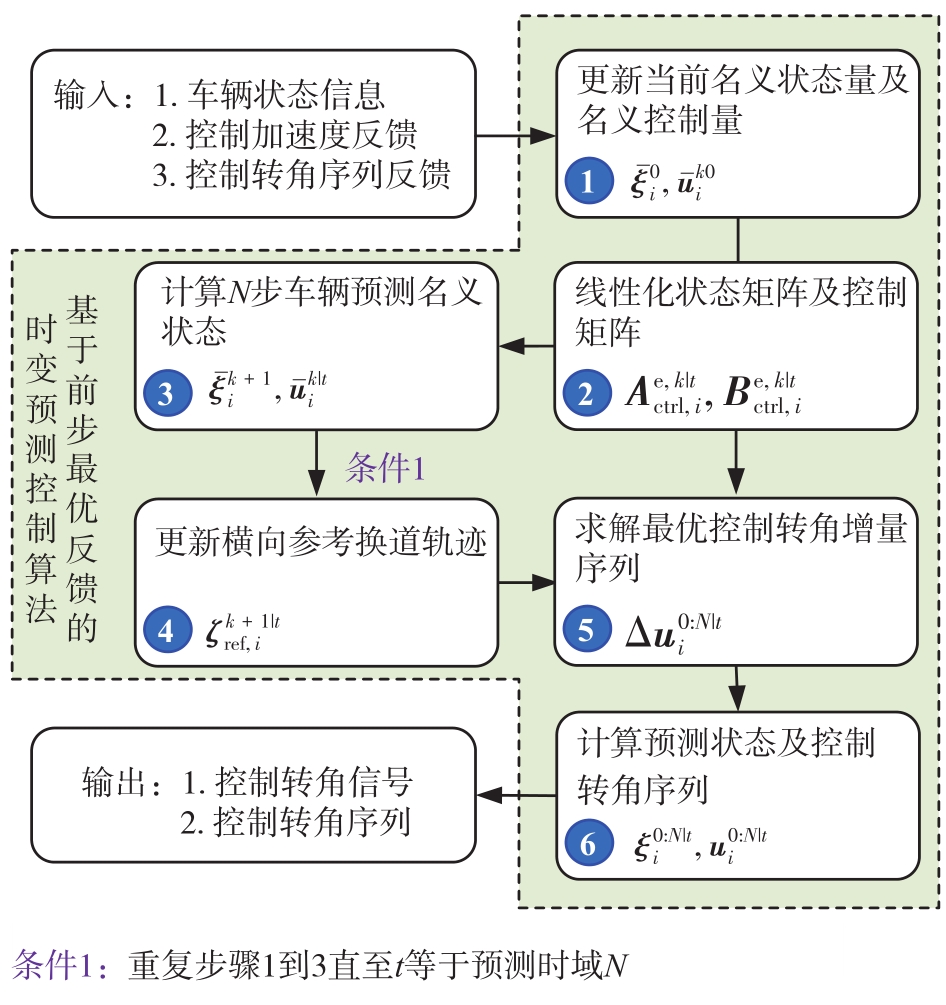
图6
整体算法框架"
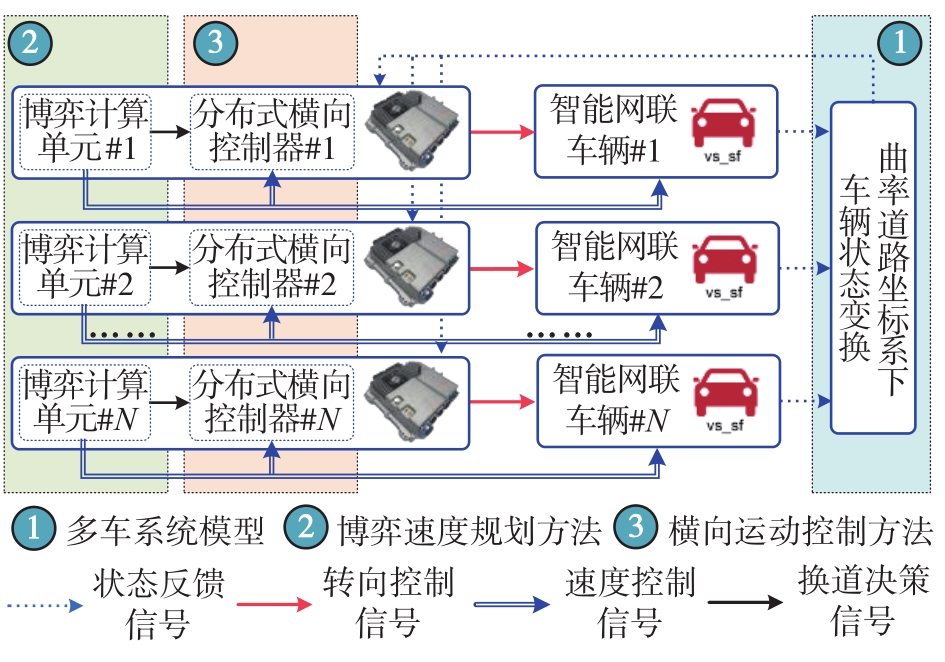
表2
仿真参数设置"
| 参数 | 数值 |
|---|---|
| 质量 | 1 523 |
| 车体转动惯量 | 1 536 |
| 质心到前轴距离 | 1.112 |
| 质心到后轴距离 | 1.805 |
| 前轮侧偏刚度 | 57 300 |
| 后轮侧偏刚度 | 86 900 |
| 预测时域 | 10 |
| 安全相对距离 | 10 |
| 加速度约束 | ±3.5 |
| 转角约束 | ±0.35 |
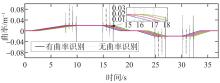
图7
曲率识别计算结果"
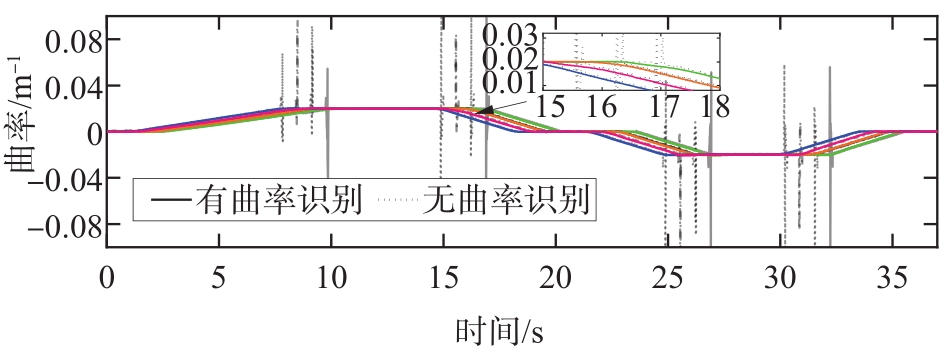
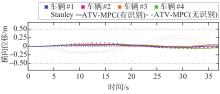
图8
横向跟踪结果"
图9
前轮输入转向角"
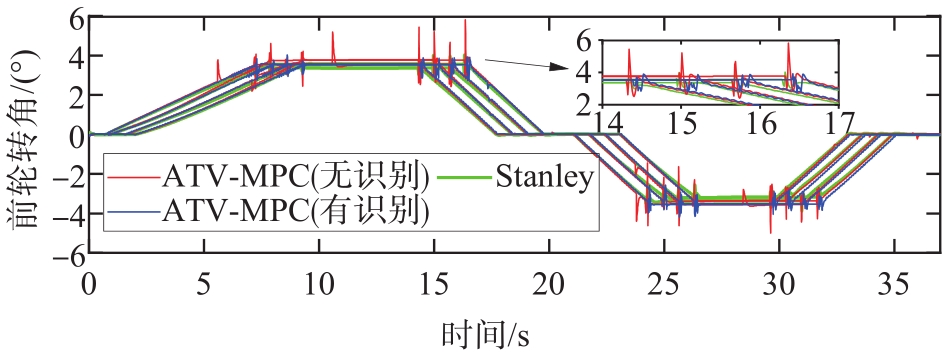

图10
CarSim仿真时刻场景图"
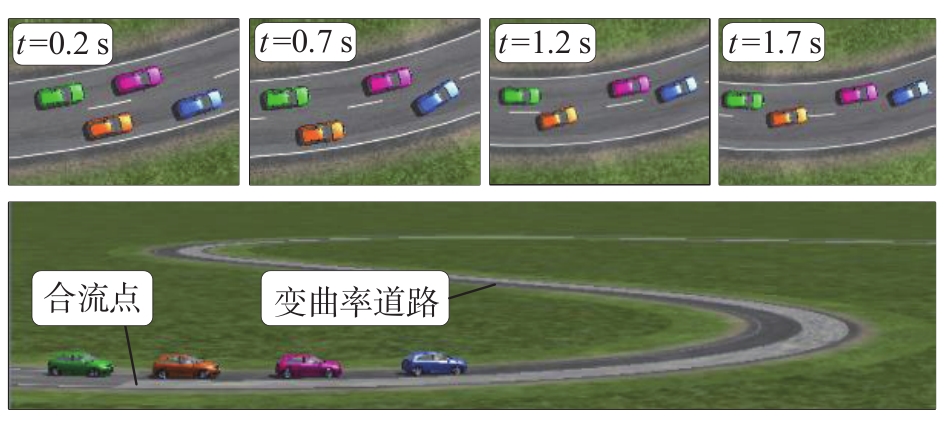

图11
曲率坐标系下投影的时刻场景图"
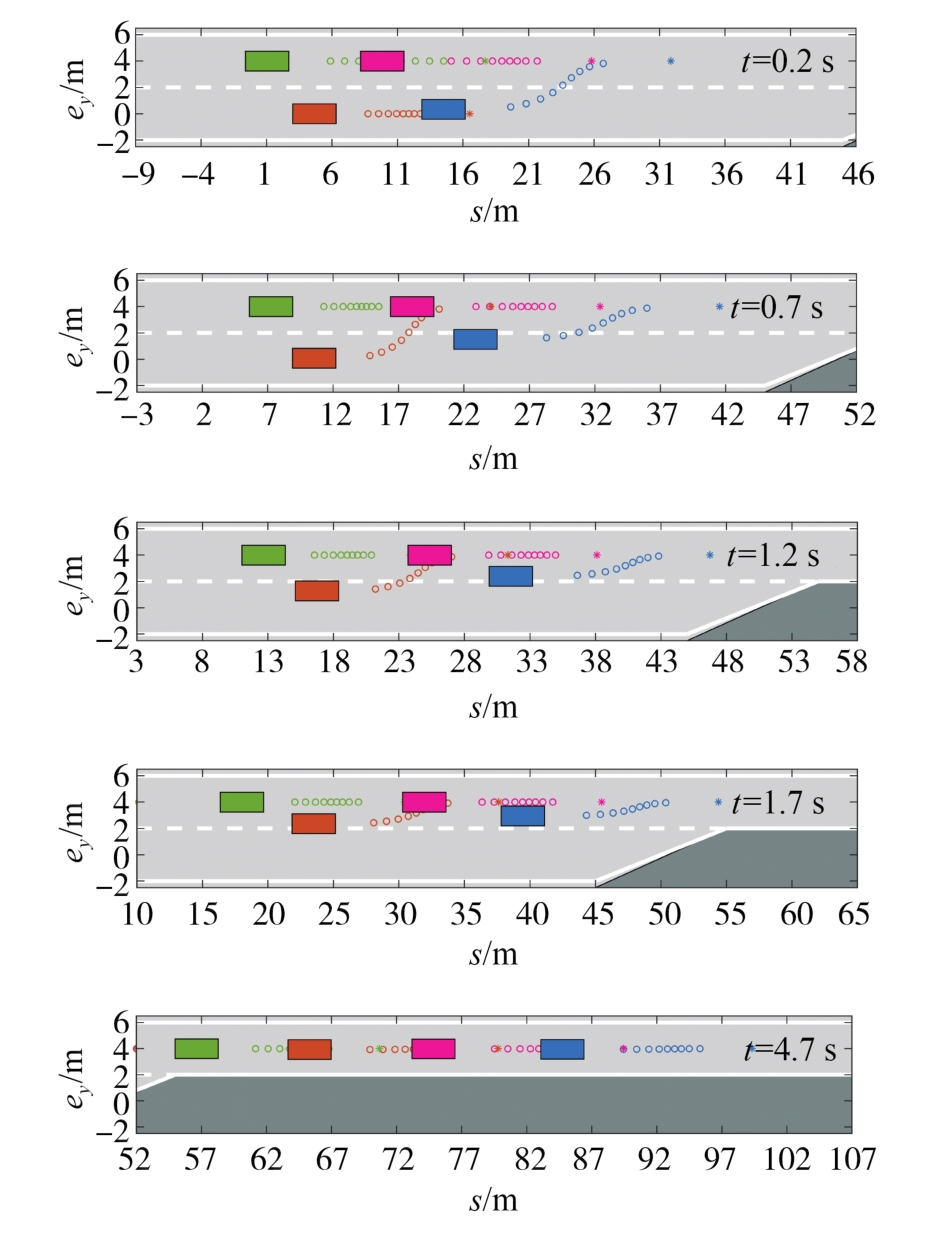
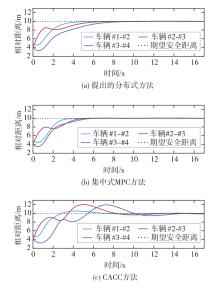
图12
相对距离变化结果"
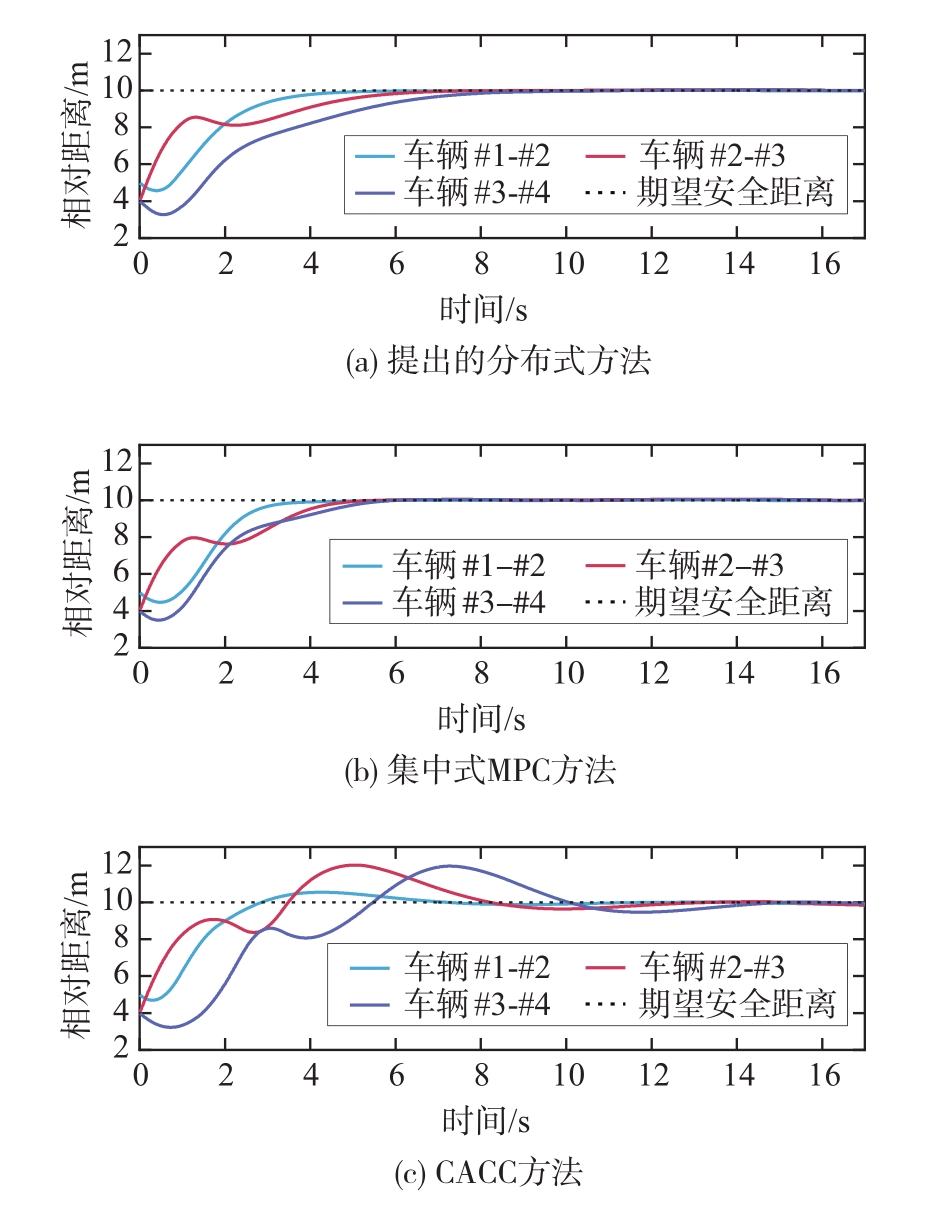
图13
碰撞时间倒数结果"
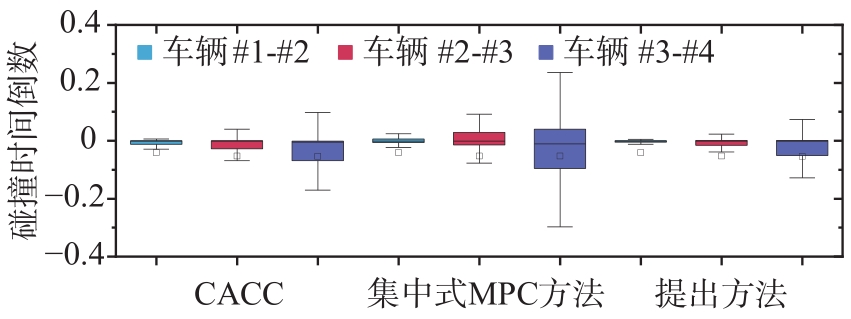

图14
车速变化结果"
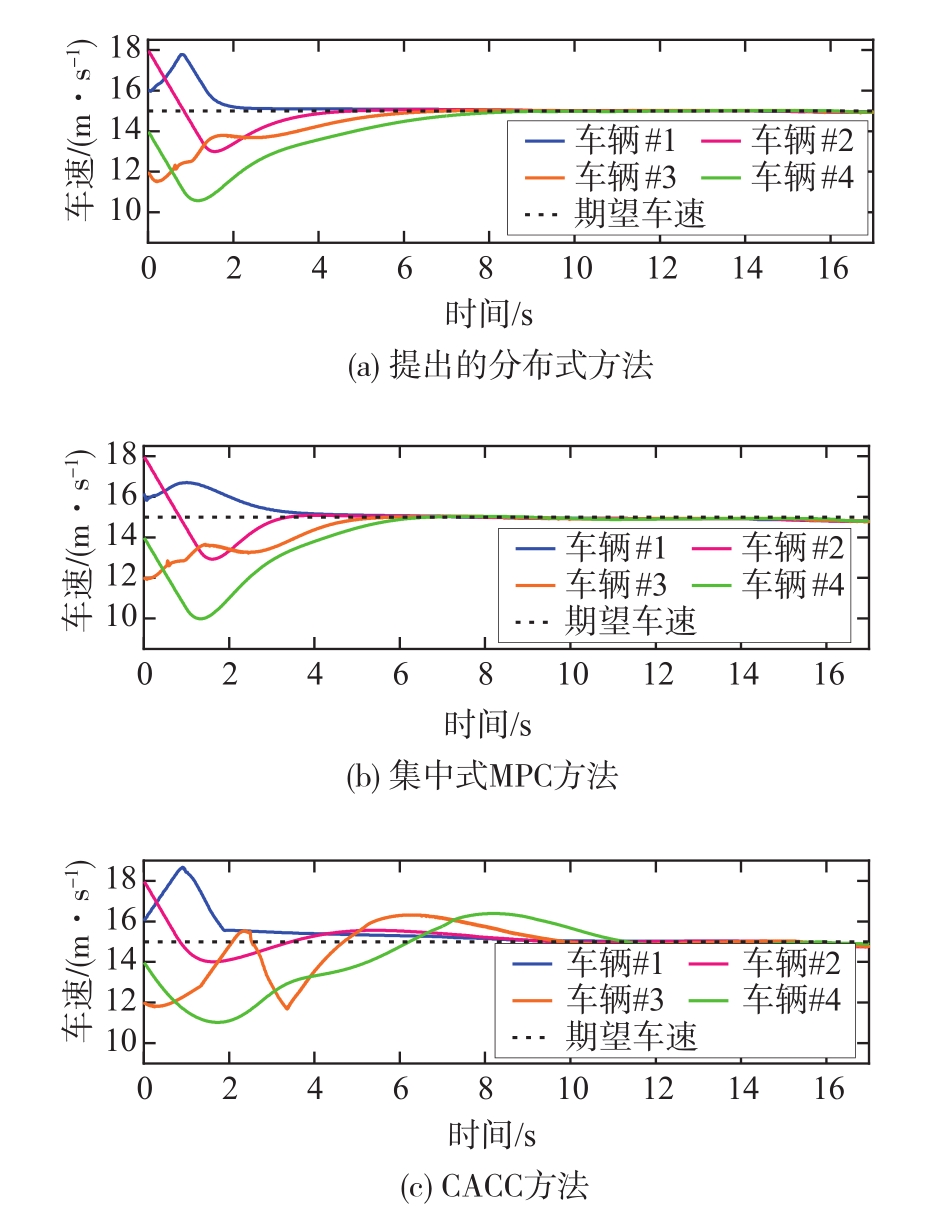

图15
加速度变化结果"
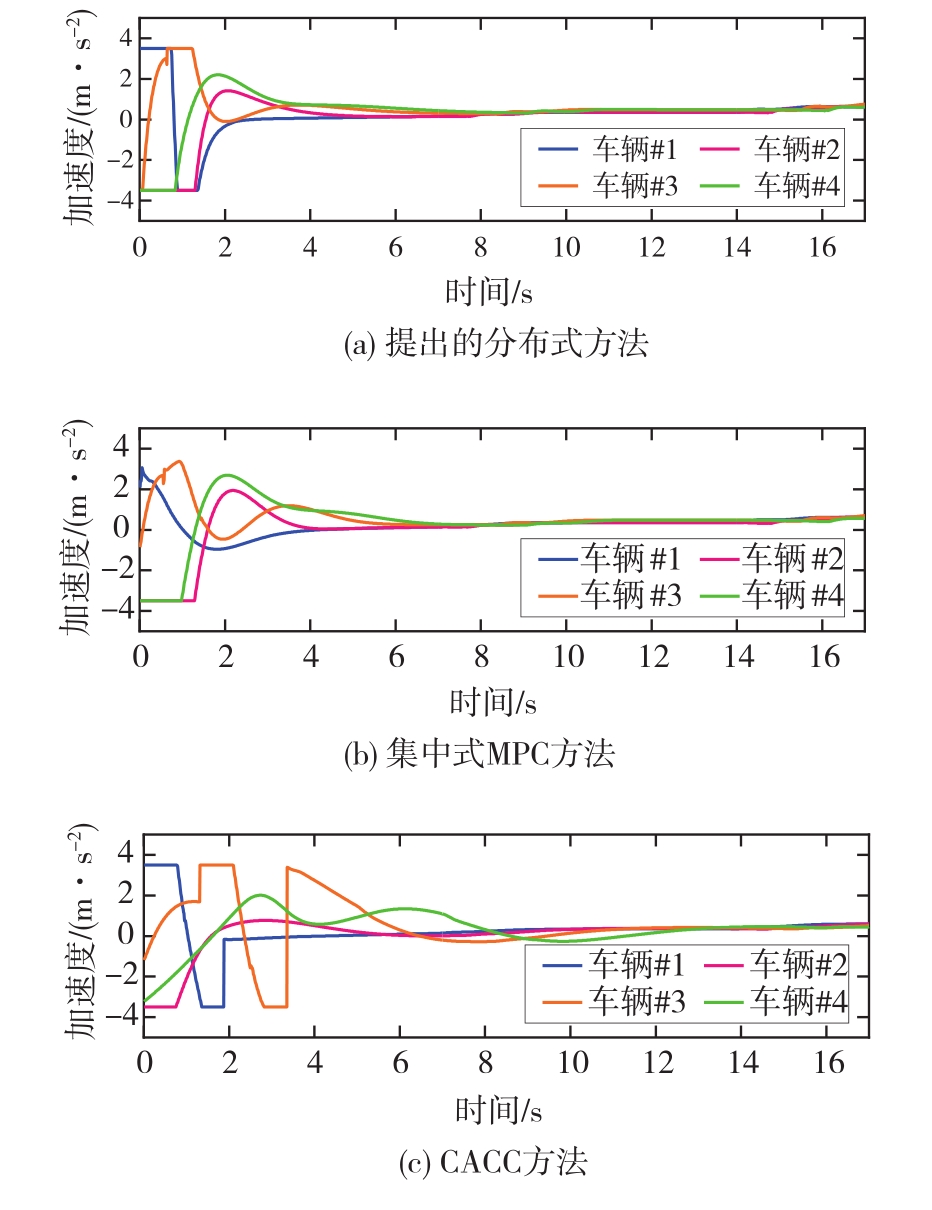

图16
横向位移变化结果"
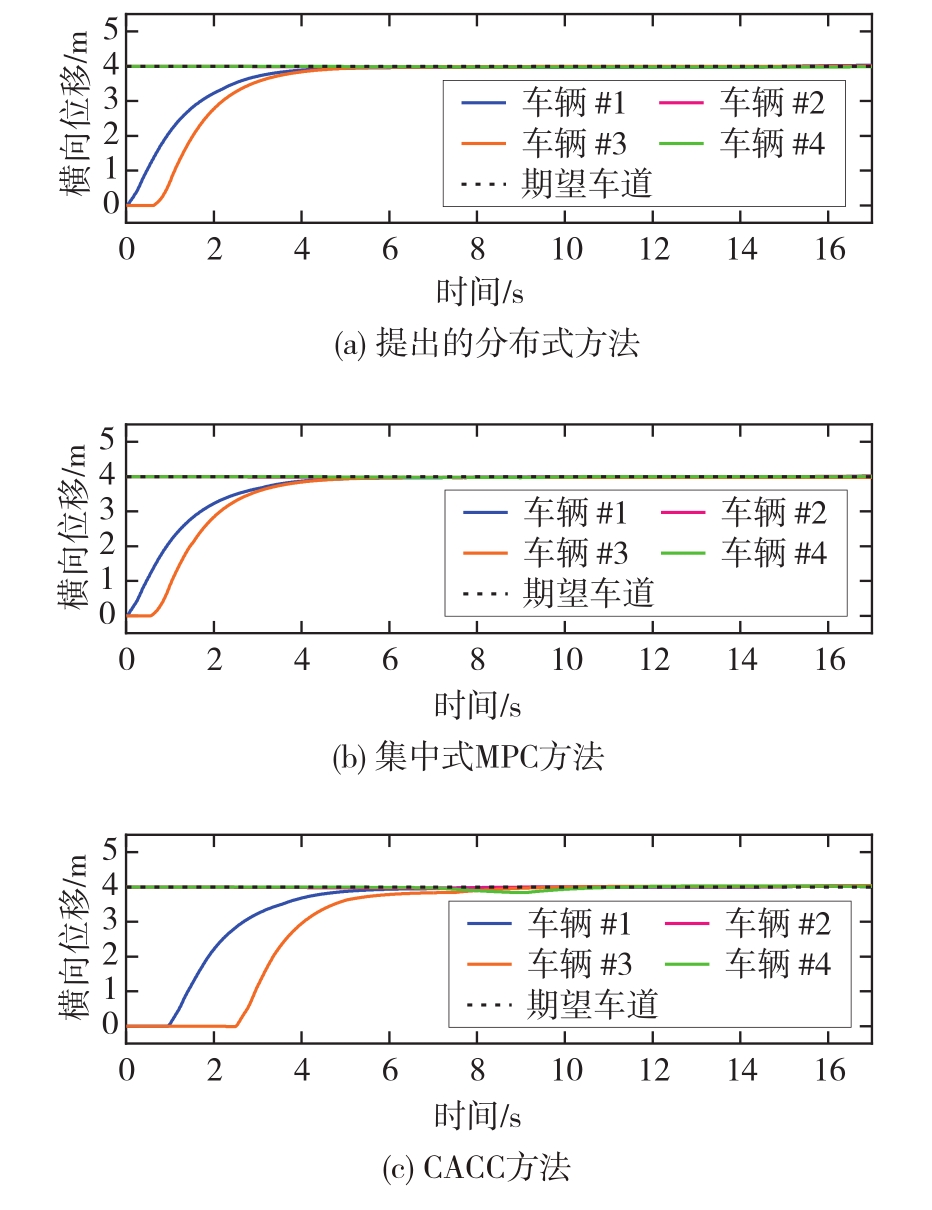
图17
车辆#1换道与原始代价"
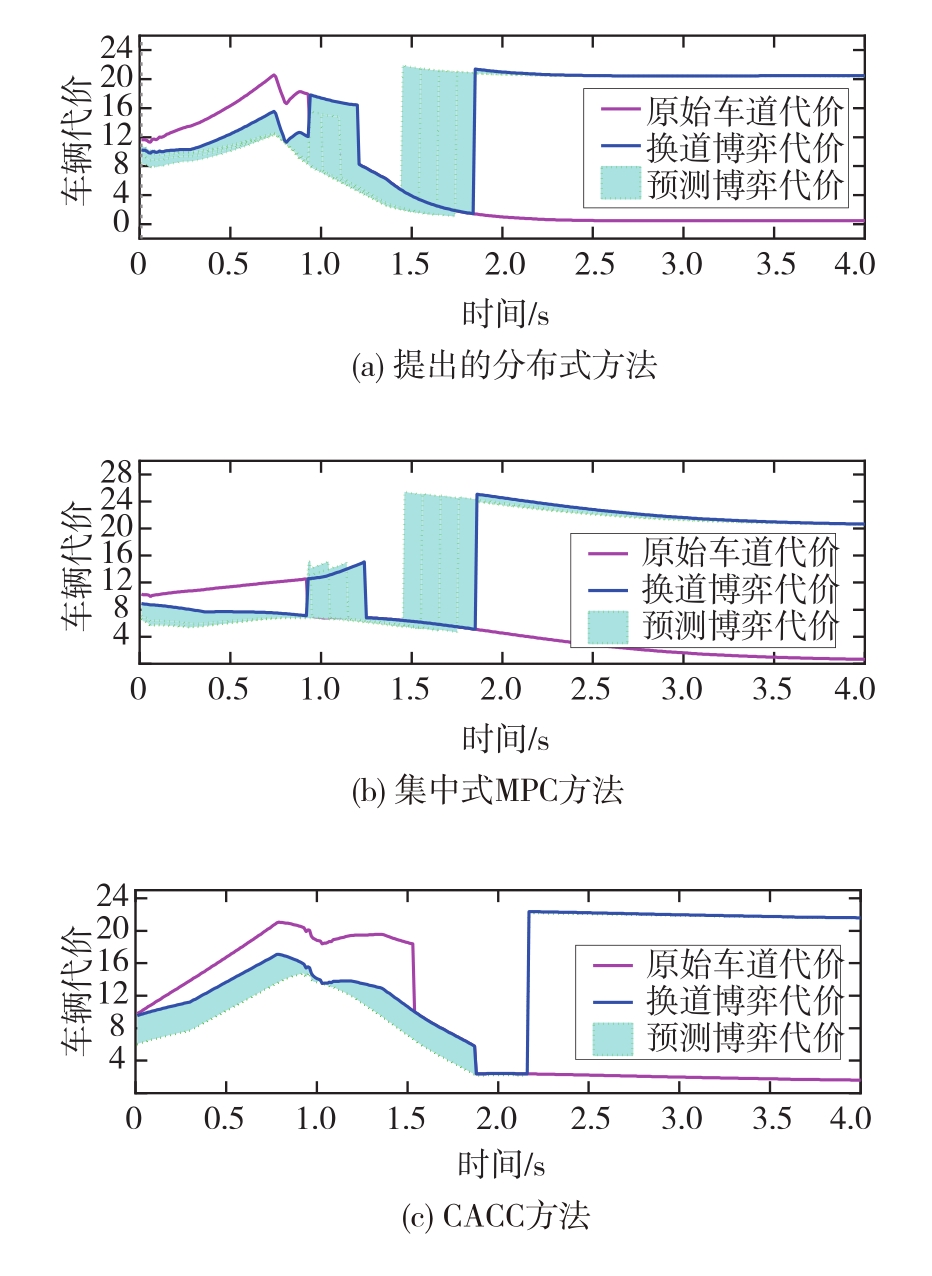
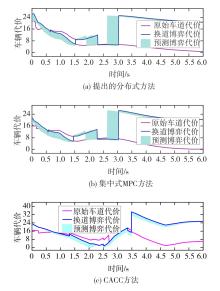
图18
车辆#3换道与原始代价"
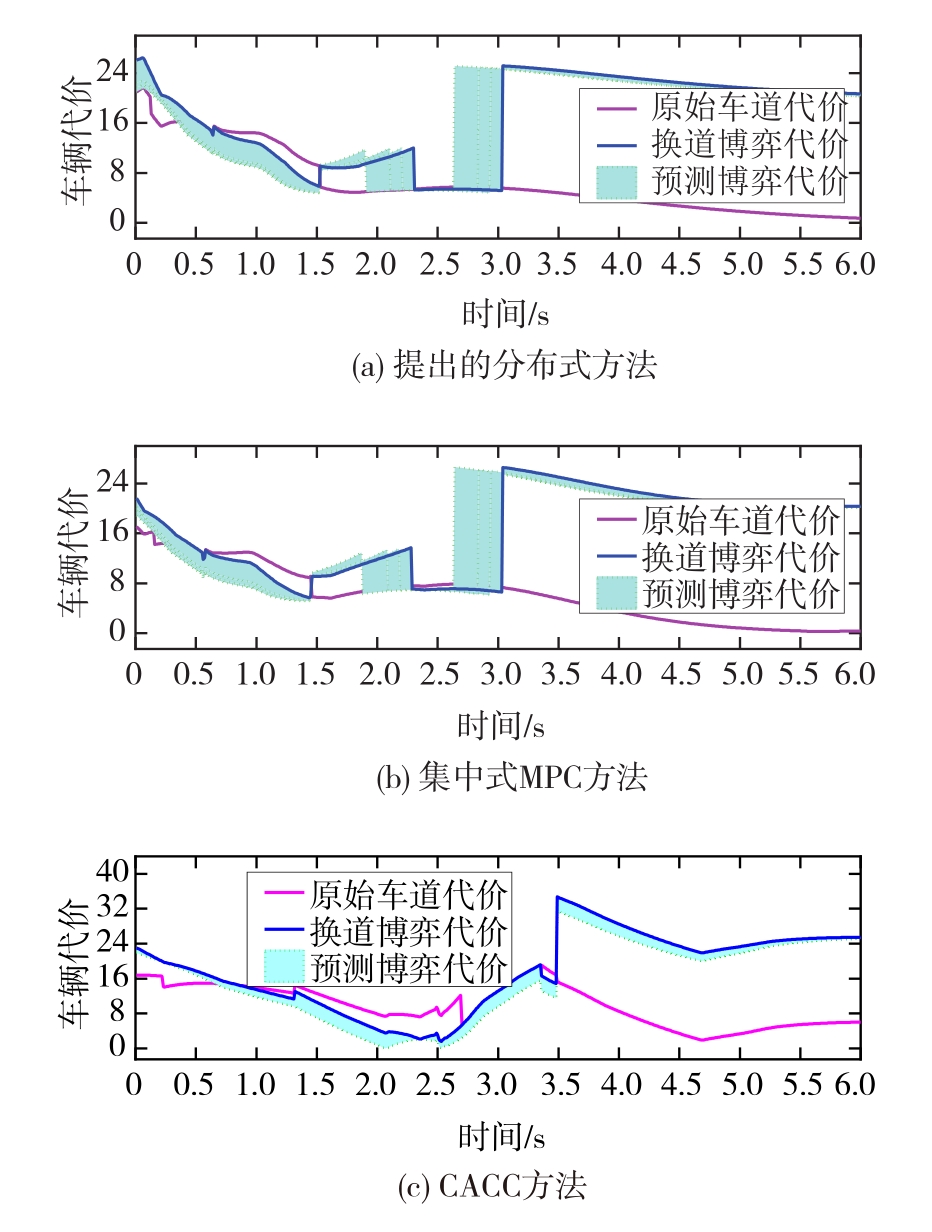
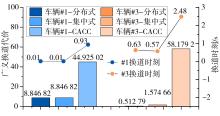
图19
广义换道代价结果"
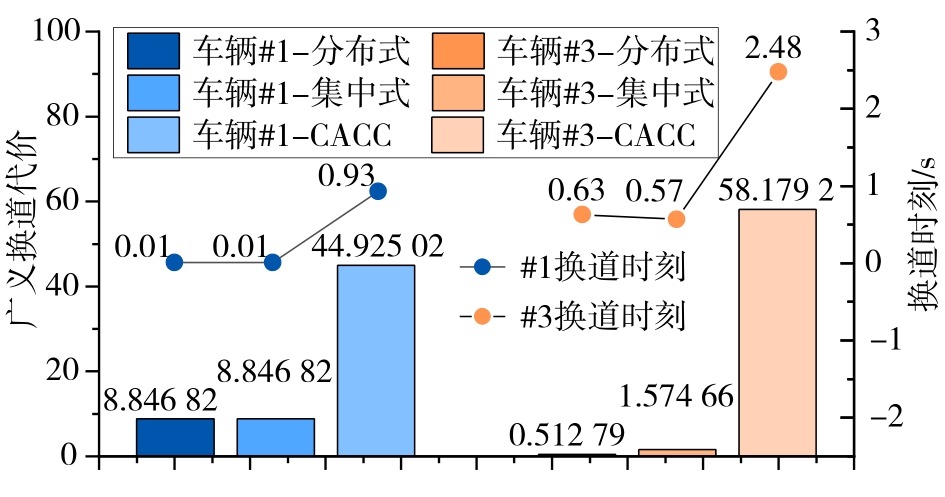
图20
单步计算时间结果"
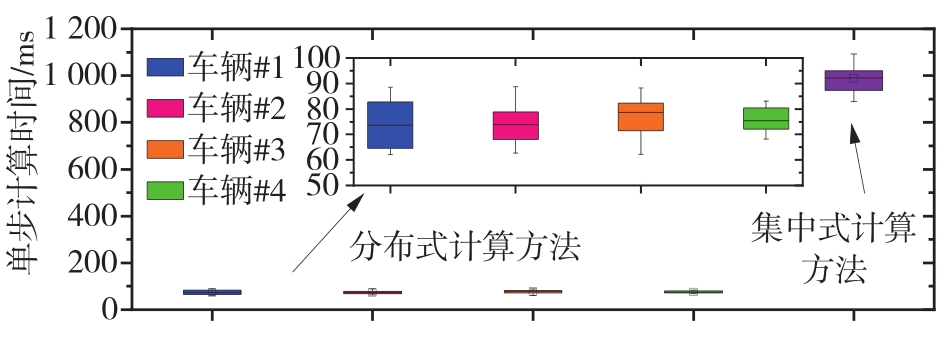
表3
优化问题规模"
| 方法 | 分布式 | 集中式 |
|---|---|---|
| 求解器内计算矩阵个数 | 397 | 3 411 |
| 输入参数个数 | 29 | 228 |
| 求解器内变量个数 | 38 | 181 |
| 1 | 刘志强, 韩静文, 倪捷. 智能网联环境下的多车协同换道策略研究 [J]. 汽车工程, 2020, 42(3): 299-306. |
| LIU Zhiqiang, HAN Jingwen, NI Jie, et al. Study on multi-vehicle coordinated lane change strategy under network conditions [J]. Automotive Engineering, 2020, 42(3): 299-306. | |
| 2 | 李立, 徐志刚, 赵祥模, 等. 智能网联汽车运动规划方法研究综述 [J]. 中国公路学报, 2019, 32(6): 20-33. |
| LI Li, XU Zhigang, ZHAO Xiangmo, et al. Review of motion planning methods of intelligent connected vehicles [J]. China Journal of Highway and Transport, 2019, 32(6): 20-33. | |
| 3 | CHENG Shuo, LI Liang, GUO Hongqiang, et al. Longitudinal collision avoidance and lateral stability adaptive control system based on MPC of autonomous vehicles [J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(6): 2376-2385. |
| 4 | LI Guofa, YANG Yifan, ZHANG Tingru, et al. Risk assessment based collision avoidance decision-making for autonomous vehicles in multi-scenarios [J]. Transportation Research Part C: Emerging Technologies, 2021, 122. |
| 5 | 鲁若宇, 胡杰, 陈瑞楠, 等. 基于 DMPC 的智能汽车协同式自适应巡航控制 [J]. 汽车工程, 2021, 43(8): 1177-1186. |
| LU Ruoyu, HU Jie, CHEN Ruinan, et al. Cooperative adaptive cruise control of intelligent vehicles based on DMPC [J]. Automotive Engineering, 2021, 43(8): 1177-1186. | |
| 6 | CHEN Shuping, CHEN Huiyan, NEGRUT Dan. Implementation of MPC-based path tracking for autonomous vehicles considering three vehicle dynamics models with different fidelities [J]. Automotive Innovation, 2020, 3(4): 386-399. |
| 7 | WANG Yangyang, PAN Ding, DENG Hangyun, et al. Dynamic trajectory planning of autonomous lane change at medium and low speeds based on elastic soft constraint of the safety domain [J]. Automotive Innovation, 2020, 3(1): 73-87. |
| 8 | ZHONG Yihe, GUO Lulu, ZHANG Yuxiang, et al. Optimal lane change control of intelligent vehicle based on MPC [C]. 2019 Chinese Control And Decision Conference (CCDC). IEEE, 2019: 1468-1473. |
| 9 | 赵菲, 王建, 张天雷, 等. 云控场景下车辆队列的模型预测控制方法 [J]. 汽车工程, 2022, 44(2): 179-189. |
| ZHAO Fei, WANG Jian, ZHANG Tianlei, et al. Model predictive control method for vehicle platoon under cloud control scenes [J]. Automotive Engineering, 2022, 44(2): 179-189. | |
| 10 | DU Yaoqiong, WANG Yizhou, CHAN Chingyao. Autonomous lane-change controller via mixed logical dynamical [C]. 17th International IEEE Conference on Intelligent Transportation Systems (ITSC). IEEE, 2014: 1154-1159. |
| 11 | 杨泽宇, 黄晋, 胡展溢, 等. 严格避撞的车辆队列分布式鲁棒控制 [J]. 汽车工程, 2020, 42(10): 1312-1319. |
| YANG Zeyu, HUANG Jin, HU Zhanyi, et al. Distributed robust control of vehicle platoon for strict collision avoidance [J]. Automotive Engineering, 2020, 42(10): 1312-1319. | |
| 12 | SUH Jongsang, CHAE Heungseok, YI Kyongsu. Stochastic model-predictive control for lane change decision of automated driving vehicles [J]. IEEE Transactions on Vehicular Technology, 2018, 67(6): 4771-4782. |
| 13 | ZHUANG Weichao, XU Liwei, YIN Guodong. Robust cooperative control of multiple autonomous vehicles for platoon formation considering parameter uncertainties [J]. Automotive Innovation, 2020, 3(1): 88-100. |
| 14 | JI Ang, LEVINSON David. A review of game theory models of lane changing [J]. Transportmetrica A: Transport Science, 2020, 16(3): 1628-1647. |
| 15 | WANG Mingyu, WANG Zijian, TALBOT John, et al. Game-theoretic planning for self-driving cars in multivehicle competitive scenarios [J]. IEEE Transactions on Robotics, 2021: 1-13. |
| 16 | HANG Peng, LV Chen, HUANG Chao, et al. An integrated framework of decision making and motion planning for autonomous vehicles considering social behaviors [J]. IEEE Transactions on Vehicular Technology, 2020, 69(12): 14458-14469. |
| 17 | HANG Peng, LV Chen, XING Yang, et al. Human-like decision making for autonomous driving: a noncooperative game theoretic approach [J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(4): 2076-2087. |
| 18 | ZHANG Yuxiang, GAO Bingzhao, GUO Lulu, et al. Adaptive decision-making for automated vehicles under roundabout scenarios using optimization embedded reinforcement learning [J]. IEEE Transactions on Neural Networks and Learning Systems, 2020, 32(12): 5526-5538. |
| 19 | PENG Baiyu, SUN Qi, LI Shengbo Eben, et al. End-to-end autonomous driving through dueling double deep Q-network [J]. Automotive Innovation, 2021, 4(3): 328-337. |
| 20 | LI Guofa, LI Shenglong, LI Shen, et al. Deep reinforcement learning enabled decision-making for autonomous driving at intersections [J]. Automotive Innovation, 2020, 3(4): 374-85. |
| 21 | 宋晓琳, 盛鑫, 曹昊天, 等. 基于模仿学习和强化学习的智能车辆换道行为决策 [J]. 汽车工程, 2021, 43(1): 59-67. |
| SONG Xiaolin, SHENG Xin, CAO Haotian, et al. Lane-change behavior decision-making of intelligent vehicle based on imitaion learning and reinforcement learning [J]. Automotive Engineering, 2021, 43(1): 59-67. | |
| 22 | WEN Lu, DUAN Jingliang, LI Shengbo Eben, et al. Safe reinforcement learning for autonomous vehicles through parallel constrained policy optimization [C]. 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2020: 1-7. |
| 23 | MU Yao, PENG Baiyu, GU Ziqing, et al. Mixed reinforcement learning for efficient policy optimization in stochastic environments [C]. 2020 20th International Conference on Control, Automation and Systems (ICCAS). IEEE, 2020: 1212-1219. |
| 24 | XU Biao, LI Shengbo Eben, BIAN Yougang, et al. Distributed conflict-free cooperation for multiple connected vehicles at unsignalized intersections [J]. Transportation Research Part C: Emerging Technologies, 2018, 93: 322-334. |
| 25 | VAIO Marco Di, FALCONE Paolo, HULT Robert, et al. Design and experimental validation of a distributed interaction protocol for connected autonomous vehicles at a road intersection [J]. IEEE Transactions on Vehicular Technology, 2019, 68(10): 9451-9465. |
| 26 | GRAF PLESSEN Mogens, BERNARDINI Daniele, ESEN Hasan, et al. Spatial-based predictive control and geometric corridor planning for adaptive cruise control coupled with obstacle avoidance [J]. IEEE Transactions on Control Systems Technology, 2018, 26(1): 38-50. |
| 27 | FALCONE Paolo, BORRELLI Francesco, ASGARI Jahan, et al. Predictive active steering control for autonomous vehicle systems [J]. IEEE Transactions on Control Systems Technology, 2007, 15(3): 566-580. |
| 28 | JI Jie, KHAJEPOUR Amir, MELEK Wael William, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints [J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. |
| 29 | 裴晓飞, 刘昭度, 马国成, 等. 汽车主动避撞系统的安全距离模型和目标检测算法[J]. 汽车安全与节能学报, 2012, 3(1): 26-33. |
| PEI Xiaofei, LIU Zhaodu, MA Guocheng, et al. Safe distance model and obstacle detection algorithms for a collision warning and collision avoidance system[J]. Automotive Safety and Energy, 2012, 3(1): 26-33. |
| [1] | 付新科,蔡英凤,陈龙,王海,刘擎超. 不确定性环境下的自动驾驶汽车行为决策方法[J]. 汽车工程, 2024, 46(2): 211-221. |
| [2] | 王明,唐小林,杨凯,李国法,胡晓松. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372. |
| [3] | 朱向雷,吴志新,张宇飞,赵帅,李克秋,孙博华. 基于场景降维及采样方法的场景库优化方法研究[J]. 汽车工程, 2023, 45(8): 1408-1416. |
| [4] | 高锋,冯德福,胡秋霞. 面向NMPC运动规划系统的数值优化加速技术[J]. 汽车工程, 2023, 45(8): 1438-1447. |
| [5] | 李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7): 1174-1183. |
| [6] | 查云飞,吕小龙,陈慧勤,易迎春,王燕燕. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6): 1010-1021. |
| [7] | 贺伊琳,马建,杨舒凯,郑威,薛启帆. 融合预瞄特性的智能电动汽车稳定性模型预测控制研究[J]. 汽车工程, 2023, 45(5): 719-734. |
| [8] | 周兵,魏佳宝,柴天,吴晓建,王鹤. 基于最优方法的碰后辅助驾驶控制策略[J]. 汽车工程, 2023, 45(4): 561-571. |
| [9] | 张彬,邹渊,张旭东,孙逢春,吴喆,孟逸豪. 混动履带式无人平台轨迹跟踪控制研究[J]. 汽车工程, 2023, 45(4): 579-587. |
| [10] | 张紫微,郑玲,李以农,乔旭强,郑浩,王戡. 考虑前车运动不确定性的多目标自适应巡航控制[J]. 汽车工程, 2023, 45(3): 361-371. |
| [11] | 贺林,徐子昂,黄春荣,龚超,李书华,石琴. 线控转向系统转角预测滑模控制算法研究[J]. 汽车工程, 2023, 45(12): 2200-2208. |
| [12] | 胡丹丹,尹鹏飞,牛国臣,赵金聚. 非结构化道路下离轴式拖挂车辆主动避障控制研究[J]. 汽车工程, 2023, 45(12): 2318-2329. |
| [13] | 宋强,王冠峰,商赫,张念忠. 基于多参数控制的分布式驱动电动汽车操纵稳定性控制策略研究[J]. 汽车工程, 2023, 45(11): 2104-2112. |
| [14] | 陈龙,杨晨,蔡英凤,王海,李祎承. 基于多模态特征融合的行人穿越意图预测方法[J]. 汽车工程, 2023, 45(10): 1779-1790. |
| [15] | 芦勇,何一超,田贺,江昆,杨殿阁. 面向量产的自适应巡航控制系统纵向加速度规划方法研究[J]. 汽车工程, 2023, 45(10): 1803-1814. |
|