汽车工程 ›› 2023, Vol. 45 ›› Issue (3): 361-371.doi: 10.19562/j.chinasae.qcgc.2023.03.003
所属专题: 智能网联汽车技术专题-控制2023年
张紫微1,郑玲1,2( ),李以农1,2,乔旭强1,郑浩1,王戡1
),李以农1,2,乔旭强1,郑浩1,王戡1
收稿日期:2022-10-12
修回日期:2022-11-08
出版日期:2023-03-25
发布日期:2023-03-22
通讯作者:
郑玲
E-mail:zling@cqu.edu.cn
基金资助:
Ziwei Zhang1,Ling Zheng1,2(),Yinong Li1,2,Xuqiang Qiao1,Hao Zheng1,Kan Wang1
Received:2022-10-12
Revised:2022-11-08
Online:2023-03-25
Published:2023-03-22
Contact:
Ling Zheng
E-mail:zling@cqu.edu.cn
摘要:
考虑前车运动状态不可控所带来的性能下降,提出一种基于高斯过程的随机模型预测多目标自适应巡航控制方法。基于车间运动关系对跟驰系统进行集成建模,综合考虑车辆安全、经济、舒适等多维诉求,确定跟驰系统目标函数与性能约束;引入径向基核描述样本间的关系,通过极大似然法获取预测模型超参数,根据历史交通数据,对前车运动轨迹进行短期预测;考虑预测结果存在的偏差,引入概率约束,建立不确定环境下的随机预测模型以保障系统在随机扰动下的整体性能最优;通过切入、加速跟驰、减速避撞等典型场景对算法的有效性与优越性进行验证。研究结果表明:所提出的方法具有良好的工况适应性,可快速消除跟踪误差与前车运动保持一致,使车辆对交通环境的反应更加敏捷。
张紫微,郑玲,李以农,乔旭强,郑浩,王戡. 考虑前车运动不确定性的多目标自适应巡航控制[J]. 汽车工程, 2023, 45(3): 361-371.
Ziwei Zhang,Ling Zheng,Yinong Li,Xuqiang Qiao,Hao Zheng,Kan Wang. A Multi-objective Adaptive Cruise Control Strategy for Autonomous Vehicle Considering Uncertain Movements of Preceding Vehicle[J]. Automotive Engineering, 2023, 45(3): 361-371.

图1
车辆跟驰运动关系"

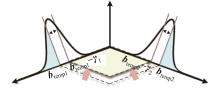
图2
状态约束边界束紧示意图"
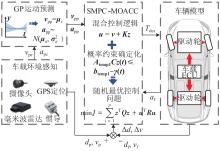
图3
基于SMPC的MOACC控制架构"
表1
控制器参数设置"
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| th/s | 1.5 | (afmin, afmax) | (-2.5, 2.5) |
| ds/m | 5 | (υΔdmin, υΔdmax) | (-3, 3) |
| KL | 1.0 | (υΔvmin, υΔvmax) | (-1, 1) |
| TL | 0.4 | (υafmin, υafmax) | (-0.1, 0.1) |
| tTTC/s | -3 | (υafdesmin, υafdesmax) | (-0.1, 0.1) |
| ds0/m | 5 | (Δdmin, Δdmax) | (-5, 5) |
| Ts/s | 0.05 | (Δvmin, Δvmax) | (-3, 3) |
| p | 20 | (afdesmin, afdesmax) | (-6, 6) |
| α | 0.95 |
表2
控制器对比"
| 控制器 | 前车运动状态预测 | 预测结果不确定性 |
|---|---|---|
| MPC | × | × |
| MPC+GP | √ | × |
| SMPC+GP | √ | √ |
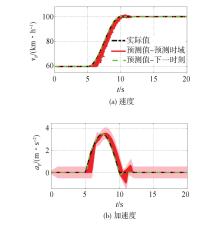
图4
前车运动状态预测结果"
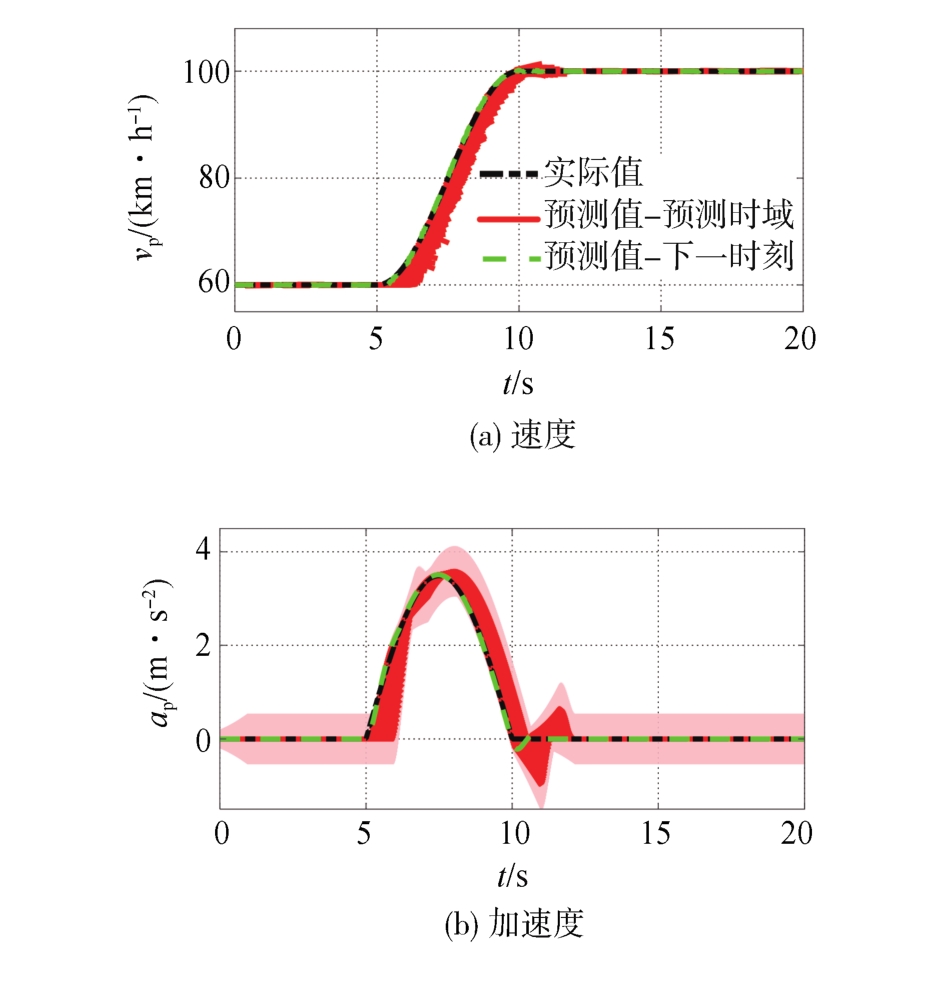

图5
系统速度对比"
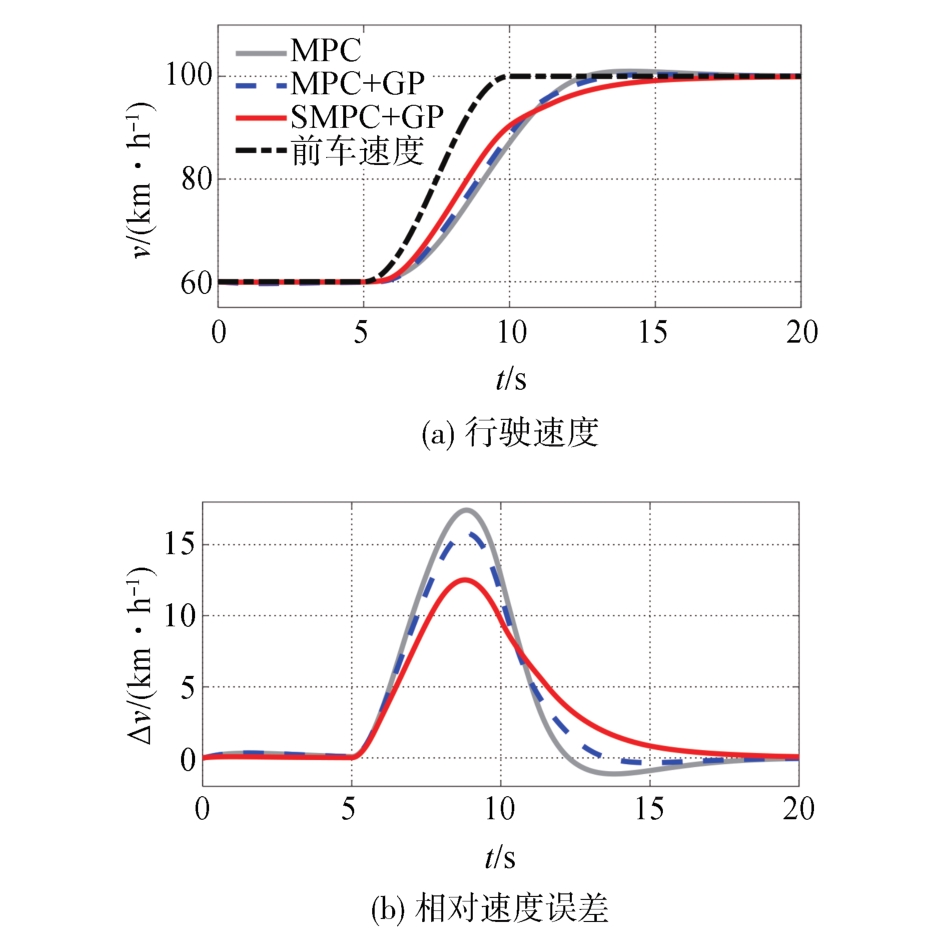

图6
系统车距对比"
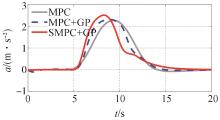
图7
自车加速度"
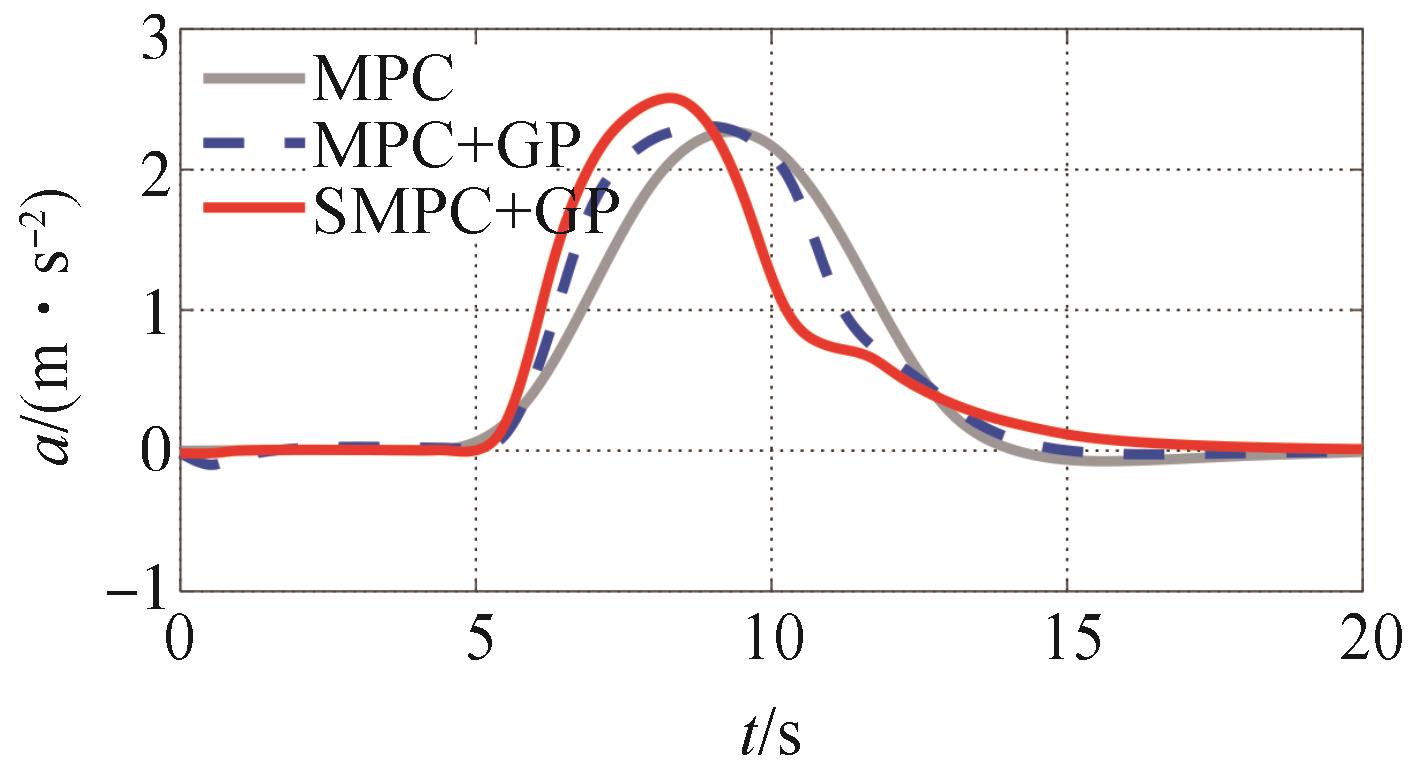
表3
工况1的系统响应对比"
| 控制器 | max(Δd)/m | rms(Δd)/m | max(Δv)/(km·h-1) | rms(Δv)/(km·h-1) | max(a)/(m·s-2) | rms(a)/(m·s-2) |
|---|---|---|---|---|---|---|
| MPC | 3.67 | 1.41 | 17.42 | 6.48 | 2.27 | 0.97 |
| MPC+GP | 1.83(↓50.14%) | 0.79(↓43.97%) | 15.79(↓9.36%) | 5.91(↓8.80%) | 2.31(↑1.76%) | 1.00(↑3.09%) |
| SMPC+GP | 2.18(↓40.60%) | 0.80(↓43.26%) | 12.52(↓28.13%) | 5.02(↓22.53%) | 2.52(↑11.01%) | 0.98(↑1.03%) |
图8
前车运动状态预测结果"


图9
系统速度对比"
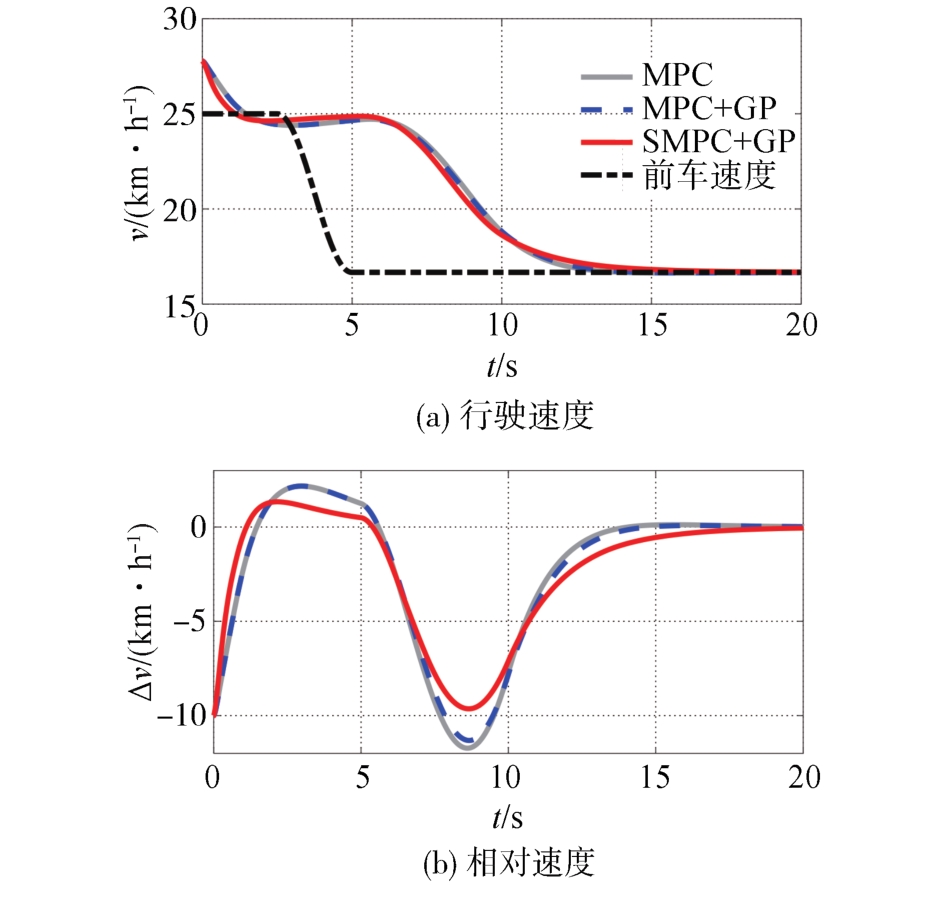

图10
系统车距对比"
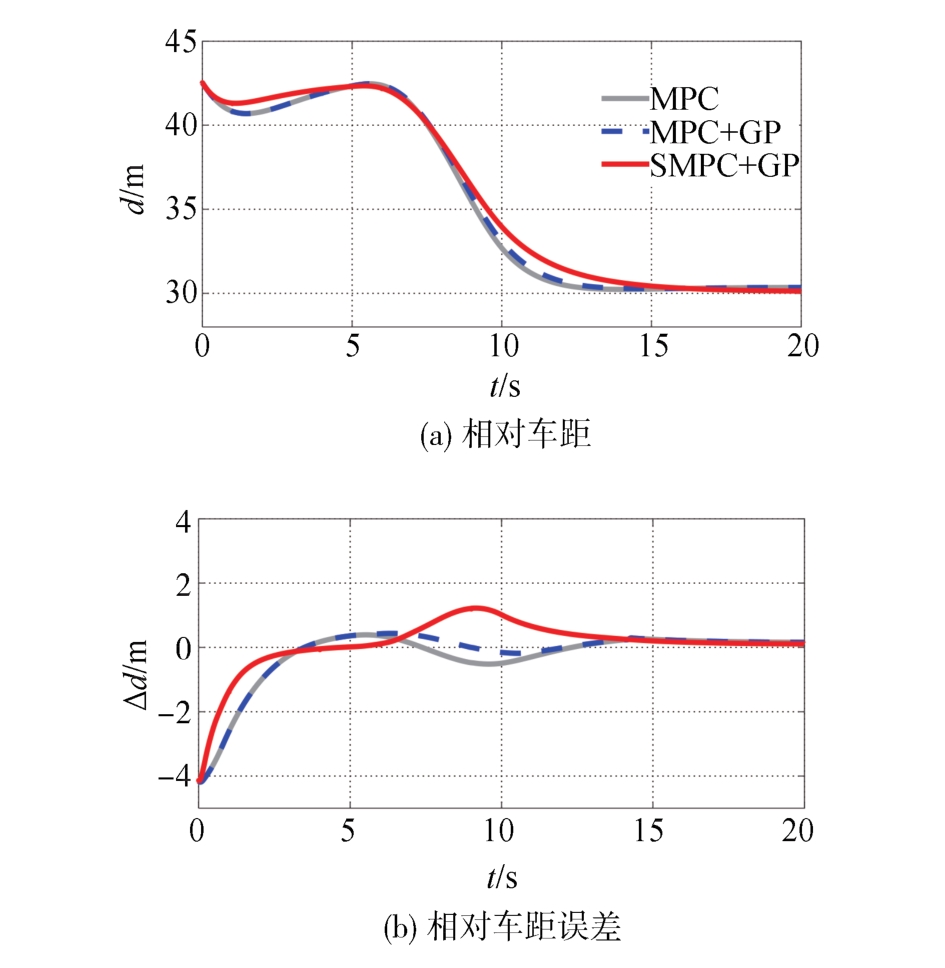
图11
自车加速度"
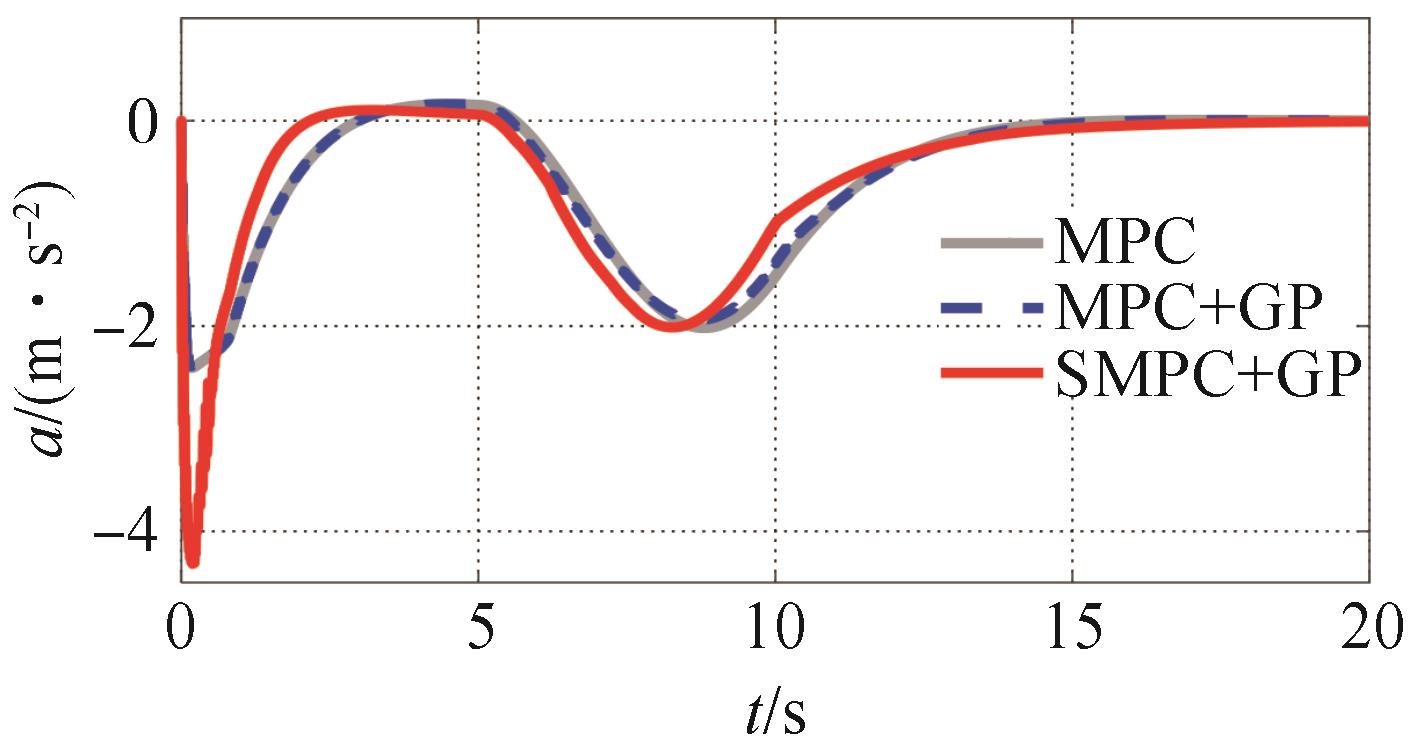
表4
工况2的系统响应对比"
| 控制器 | max(Δd)/m | rms(Δd)/m | max(Δv)/(km·h-1) | rms(Δv)/(km·h-1) | max(a)/(m·s-2) | rms(a)/(m·s-2) |
|---|---|---|---|---|---|---|
| MPC | 4.19 | 0.96 | 11.75 | 4.64 | 2.41 | 0.94 |
| MPC+GP | 4.19(-0%) | 0.95(↓1.04%) | 11.31(↓3.74%) | 4.54(↓2.16%) | 2.41(-0%) | 0.92(↓2.13%) |
| SMPC+GP | 4.17(↓0.48%) | 0.80(↓16.67%) | 10.00(↓14.89%) | 4.01(↓13.58%) | 4.32(↑79.25%) | 0.99(↑5.32%) |
图12
前车运动状态预测结果"
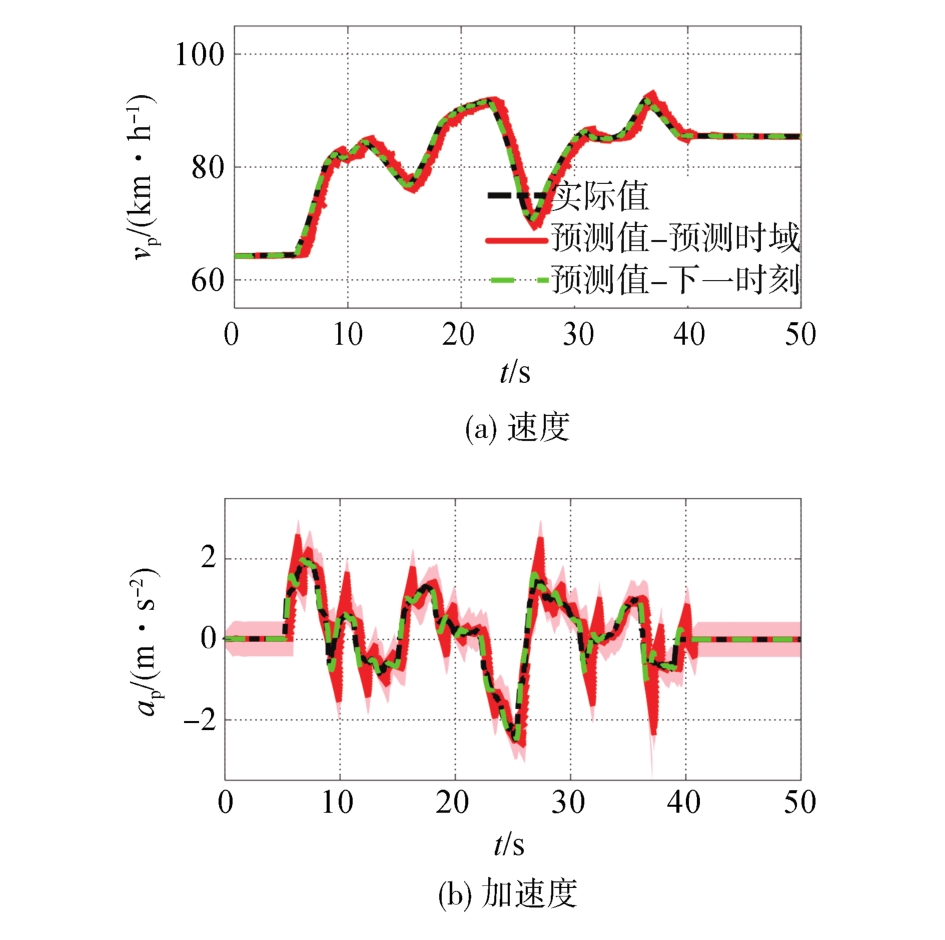
表5
硬件在环仿真的系统响应对比"
| 控制器 | max(Δd)/m | rms(Δd)/m | max(Δv)/(km·h-1) | rms(Δv)/(km·h-1) | max(a)/(m·s-2) | rms(a)/(m·s-2) |
|---|---|---|---|---|---|---|
| MPC | 0.99 | 0.51 | 9.91 | 3.28 | 1.66 | 0.56 |
| MPC+GP | 0.77(↓22.22%) | 0.46(↓9.80%) | 9.45(↓4.64%) | 3.14(↓4.27%) | 1.63(↓1.81%) | 0.54(↓4.03%) |
| SMPC+GP | 0.84(↓15.15%) | 0.22(↓56.86%) | 8.01(↓19.17%) | 2.71(↓17.38%) | 1.74(↑4.82%) | 0.54(↓2.61%) |
图13
系统速度对比"
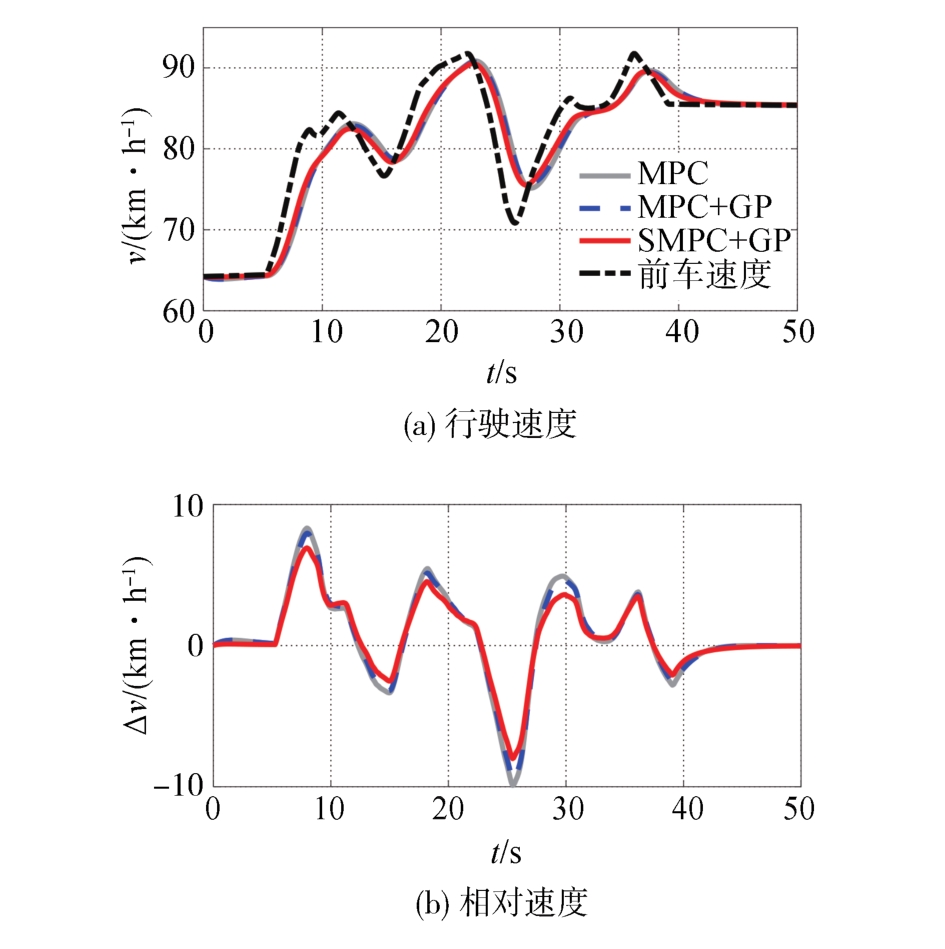

图14
系统车距对比"
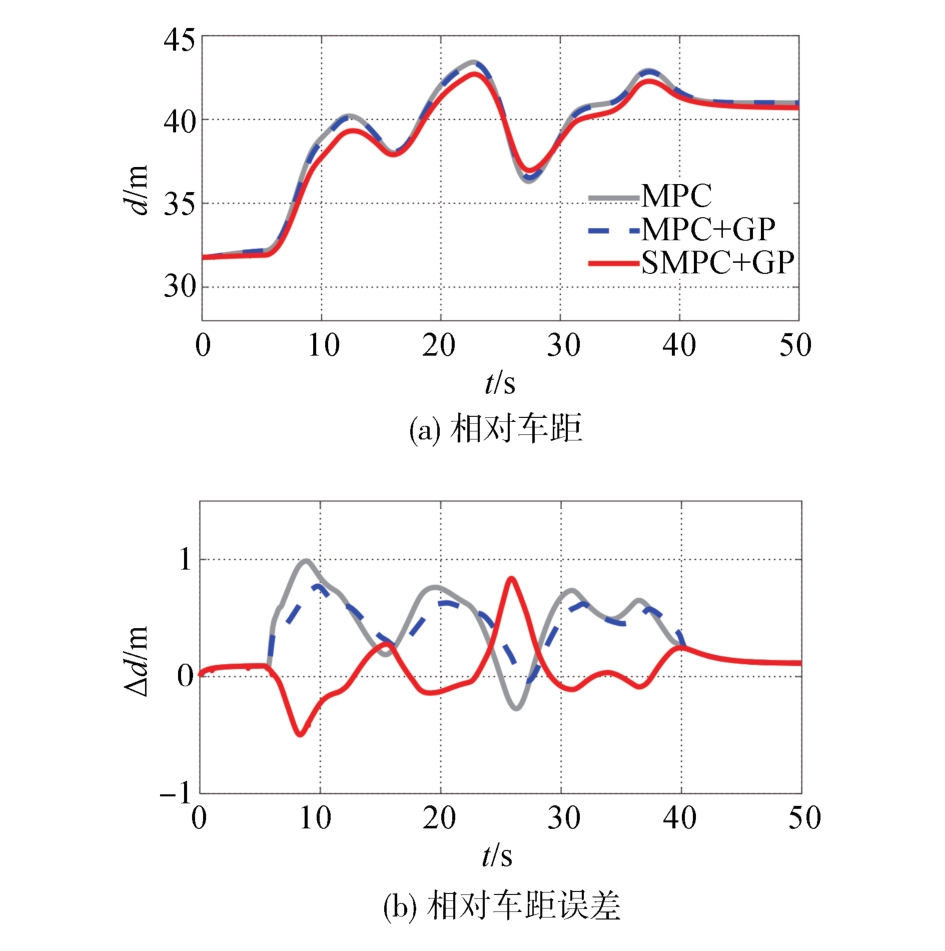

图15
自车加速度"
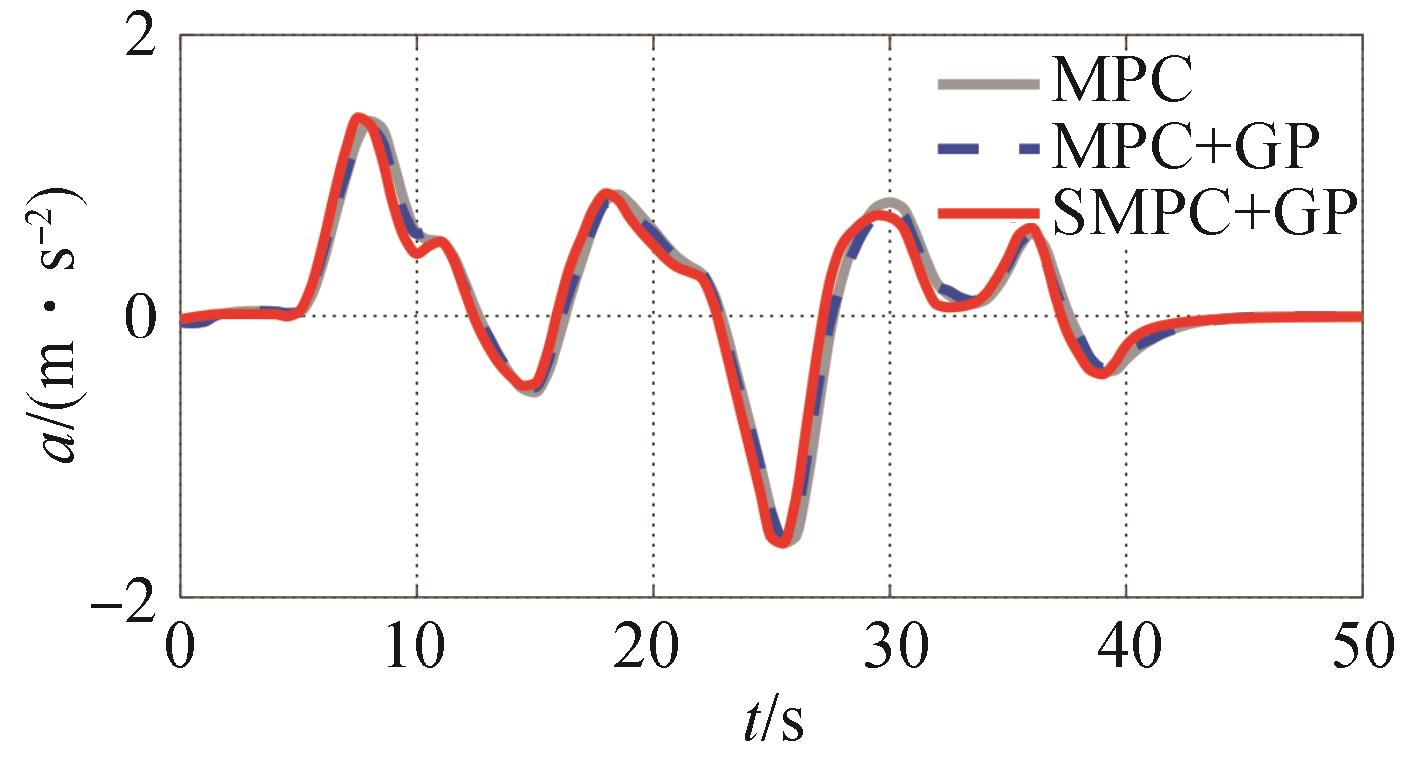
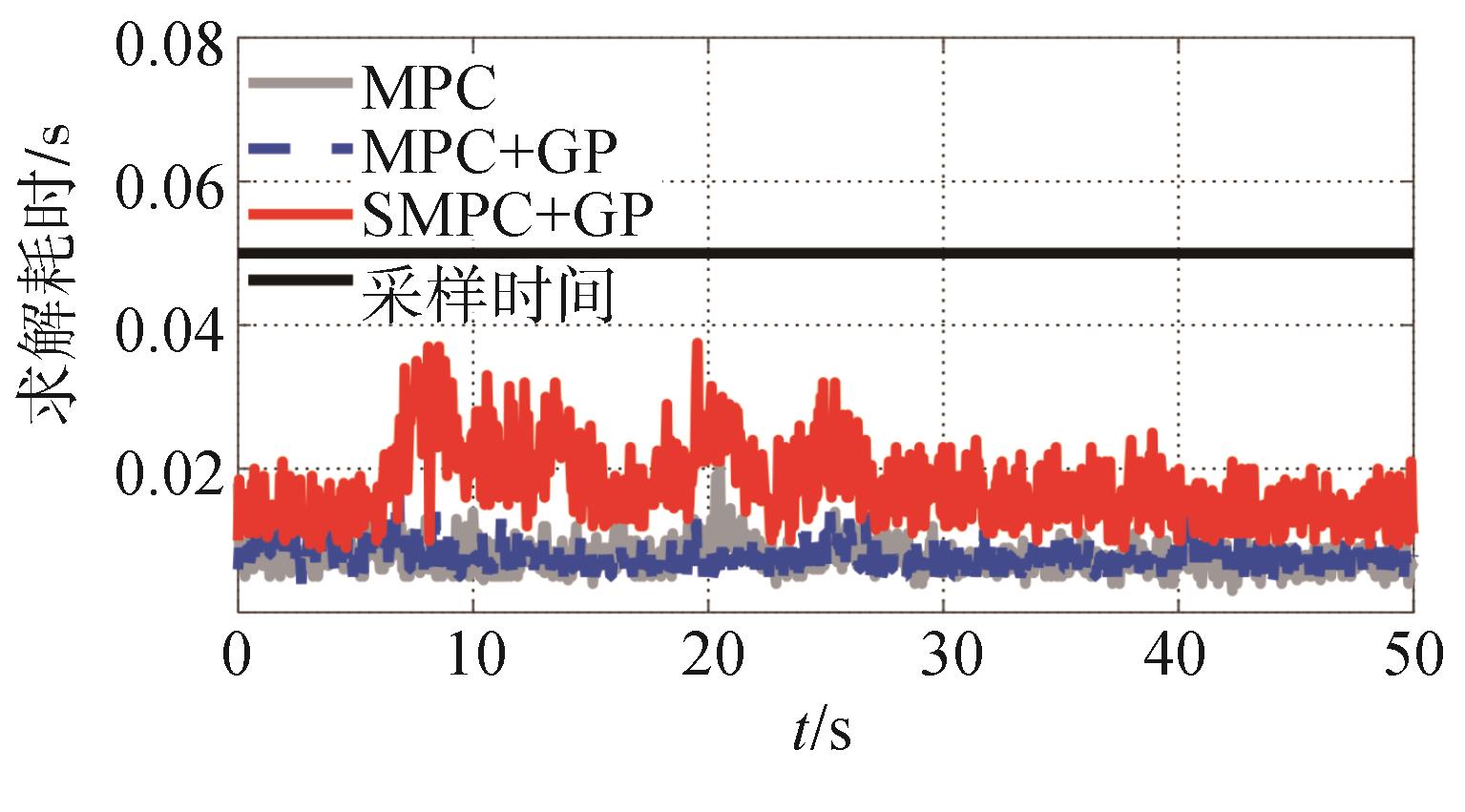
图16
控制器求解耗时"
| 1 | HUANG Y J, DING H T, ZHANG Y B, et al. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach[J]. IEEE Transactions on Industrial Electronics, 2020, 62(2): 1376-1386. |
| 2 | ZHANG J, IOANNOU P A. Longitudinal control of heavy trucks in mixed traffic: environmental and fuel economy considerations[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(1):92-104. |
| 3 | ABDULLAH R, HUSSAIN A, WARWICK K, et al. Autonomous intelligent cruise control using a novel multiple-controller framework incorporating fuzzy-logic-based switching and tuning[J]. Neurocomputing, 2008, 71(13-15): 2727-2741. |
| 4 | 李以农, 冀杰, 郑玲, 等. 智能车辆自适应巡航控制系统建模与仿真[J]. 中国机械工程, 2010, 21(11): 1374-1381. |
| LI Y N, JI J, ZHENG L, et al. Modeling and simulation of adaptive cruise control system for intelligent vehicles[J]. China Mechanical Engineering, 2010, 21(11): 1374-1381. | |
| 5 | 张亮修, 吴光强, 郭晓晓. 车辆自适应巡航控制系统的建模与分层控制[J]. 汽车工程, 2018, 40(5): 547-553. |
| ZHANG L X, WU G Q, GUO X X. Modeling and hierarchical control of vehicle ACC system[J]. Automotive Engineering, 2018, 40(5): 547-553. | |
| 6 | CHEN S P, CHEN H Y, NEGRUT D. Implementation of MPC‑based path tracking for autonomous vehicles considering three vehicle dynamics models with different fidelities[J]. Automotive Innovation, 2020, 3: 386-399. |
| 7 | 吴光强, 郭晓晓, 张亮修. 汽车自适应巡航跟车多目标鲁棒控制算法设计[J]. 哈尔滨工业大学学报, 2016, 48(1): 80-86. |
| WU G Q, GUO X X, ZHANG L X. Multi-objective robust adaptive cruise control algorithm design of car following model[J]. Journal of Harbin Institute of Technology, 2016, 48(1): 80-86. | |
| 8 | 章军辉, 李庆, 陈大鹏. 车辆多模式多目标自适应巡航控制[J]. 电子科技大学学报, 2018, 47(3): 368-375. |
| ZHANG J H, LI Q, CHEN D P. Multi-objective adaptive cruise control with multi-mode strategy [J]. Journal of University of Electronic Science and Technology of China, 2018, 47(3): 368-375. | |
| 9 | 赵树恩, 冷姚, 邵毅明. 车辆多目标自适应巡航显式模型预测控制[J]. 交通运输工程学报, 2020, 20(3): 206-216. |
| ZHAO S E, LENG Y, SHAO Y M. Explicit model predictive control of multi-objective adaptive cruise of vehicle[J]. Journal of Traffic and Transportation Engineering, 2020, 20(3): 206-216. | |
| 10 | LIANG Y X, LI Y N, YU Y H, et al. Path-following control of autonomous vehicles considering coupling effects and multi-source system uncertainties[J]. Automotive Innovation, 2021, 4: 284-300. |
| 11 | 李升波. 车辆多目标协调式自适应巡航控制[D]. 北京: 清华大学, 2009. |
| LI S B. Vehicular multi-objective coordinated adaptive cruise control[D]. Beijing: Tsinghua University, 2009. | |
| 12 | 戴旭彬, 孙涛, 夏维. 基于MPC的自适应巡航算法改进研究[J]. 机电工程, 2018, 35(6): 644-648,657. |
| DAI X B, SUN T, XIA W. Improvement of adaptive cruise algorithm based on MPC[J]. Journal of Mechanical& Electrical Engineering, 2018, 35(6): 644-648,657. | |
| 13 | HE D F, PENG B B. Gaussian learning-based fuzzy predictive cruise control for improving safety and economy of connected vehicles[J]. IET Intelligent Transport Systems, 2020, 14(5): 346-355. |
| 14 | ZHANG D Z, LI K Q, WANG J Q. A curving ACC system with coordination control of longitudinal car-following and lateral stability[J]. Vehicle System Dynamics, 2012, 50(7): 1085-1102. |
| 15 | 黄菊花, 邹汉鹏, 刘明春. 考虑测量噪声的车辆自适应巡航控制系统纵向跟车研究[J]. 北京理工大学学报, 2020, 40(3): 254-261. |
| HUANG J H, ZOU H P, LIU M C. Research on longitudinal tracking of adaptive cruise control system for vehicles considering of measurement noise[J]. Transactions of Beijing Institute of Technology, 2020, 40(3): 254-261. | |
| 16 | SAKHDARI B, AZAD N L. Adaptive tube-based nonlinear mpc for ecological autonomous cruise control of plug-in hybrid electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2018, 67(12): 11390-11401. |
| 17 | 杨威. 高速跟车工况下智能汽车拟人化驾驶决策方法研究[D]. 重庆: 重庆大学, 2020. |
| YANG W. Study on decision-planning systems of the automated vehicle based on driver’s personality under car following in highway conditions [D]. Chongqing: Chongqing University, 2020. | |
| 18 | QIAO X Q, LI Y N, ZHENG L, et al. Predicting vehicle states of naturalistic driving data based on adaptive optimization gaussian process regression[C]. 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), 2021: 418-423. |
| 19 | SCHILDBACH G, CALAFIORE G C, FAGIANO L, et al. Randomized model predictive control for stochastic linear systems[C]. 2012 American Control Conference (ACC), 2012:417-422. |
| 20 | LIU C C, CARVALHO A, SCHILDBACH G, et al. Stochastic predictive control for lane keeping assistance systems using a linear time-varying model[C]. 2015 American Control Conference (ACC), 2015: 3355-3360. |
| 21 | GRAY A, GAO Y Q, LIN T, et al. Stochastic predictive control for semi-autonomous vehicles with an uncertain driver model[C]. 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), 2013: 2329-2334. |
| 22 | CARVALHO A, GAO Y Q, LEFEVRE S, et al. Stochastic predictive control of autonomous vehicles in uncertain environments[C]. 12th International Symposium on Advanced Vehicle Control, 2014. |
| 23 | BRUEDIGAM T. Stochastic model predictive control- a simulation example[J]. 2021, arXiv:. |
| [1] | 郝建平,苏炎召,钟志华,黄晋. 面向智能汽车的SOA架构及服务调度机制研究[J]. 汽车工程, 2023, 45(9): 1563-1572. |
| [2] | 赵高士,陈龙,蔡英凤,廉玉波,王海,刘擎超,滕成龙. 融合复杂网络和记忆增强网络的轨迹预测技术[J]. 汽车工程, 2023, 45(9): 1608-1616. |
| [3] | 胡启慧,蔡英凤,王海,陈龙,董钊志,刘擎超. 基于层次图注意的异构多目标轨迹预测方法[J]. 汽车工程, 2023, 45(8): 1448-1456. |
| [4] | 高翔,陈龙,王歆叶,熊晓夏,李祎承,陈月霞. 基于轨迹预测的智能汽车行驶风险评估方法[J]. 汽车工程, 2023, 45(4): 588-597. |
| [5] | 胡杰,朱琪,陈锐鹏,张敏超,张志豪,刘昊岩. 引入必经点约束的智能汽车全局路径规划[J]. 汽车工程, 2023, 45(3): 350-360. |
| [6] | 刘正发,吴亚,刘佩根,顾荣琦,陈广. 基于特征和标签联合分布匹配的智能驾驶跨域自适应目标检测[J]. 汽车工程, 2023, 45(11): 2082-2091. |
| [7] | 赵树廉,来飞,李克强,陈涛,孟璋劼,唐逸超,吴思宇,田浩东. 基于数字孪生技术的智能汽车测试方法研究[J]. 汽车工程, 2023, 45(1): 42-51. |
| [8] | 邵文博,李骏,张玉新,王红. 智能汽车预期功能安全保障关键技术[J]. 汽车工程, 2022, 44(9): 1289-1304. |
| [9] | 汪梓豪,蔡英凤,王海,陈龙,熊晓夏. 基于单目视觉运动估计的周边多目标轨迹预测方法[J]. 汽车工程, 2022, 44(9): 1318-1326. |
| [10] | 赵超,卜德旭,曹礼鹏,李克强,罗禹贡. 强降雨场景下自适应巡航控制系统的安全控制策略[J]. 汽车工程, 2022, 44(8): 1117-1125. |
| [11] | 彭理群,王依婷,马育林,许述财. 面向混合自动驾驶车流的协同自适应巡航控制[J]. 汽车工程, 2022, 44(8): 1153-1161. |
| [12] | 梁旺,秦兆博,陈亮,边有钢,胡满江. 基于改进BP神经网络的智能车纵向控制方法[J]. 汽车工程, 2022, 44(8): 1162-1172. |
| [13] | 赵健,宋东鉴,朱冰,吴杭哲,韩嘉懿,刘宇翔. 数据机理混合驱动的交通车意图识别方法[J]. 汽车工程, 2022, 44(7): 997-1008. |
| [14] | 余嘉星,Aliasghar Arab,裴晓飞,过学迅. 考虑路径平滑性和避撞稳定性的智能汽车弯道轨迹规划研究[J]. 汽车工程, 2022, 44(5): 656-663. |
| [15] | 江浩斌,冯张棋,洪阳珂,韦奇志,皮健. 应用于车辆纵向控制的无模型自适应滑模预测控制方法[J]. 汽车工程, 2022, 44(3): 319-329. |
|