汽车工程 ›› 2022, Vol. 44 ›› Issue (9): 1318-1326.doi: 10.19562/j.chinasae.qcgc.2022.09.003
所属专题: 智能网联汽车技术专题-规划&控制2022年
汪梓豪1,蔡英凤1( ),王海2,陈龙1,熊晓夏2
),王海2,陈龙1,熊晓夏2
Zihao Wang1,Yingfeng Cai1(),Hai Wang2,Long Chen1,Xiaoxia Xiong2
摘要:
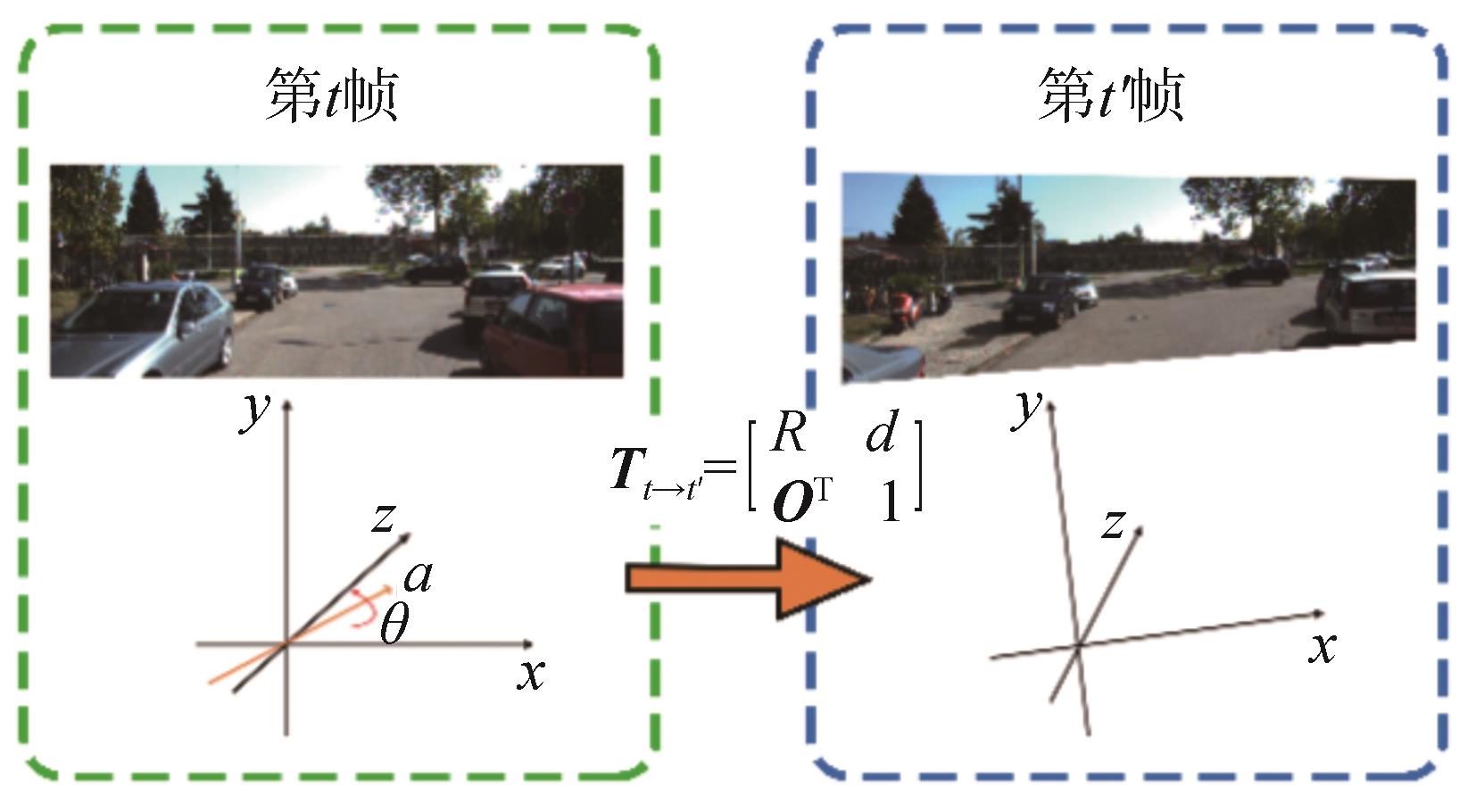
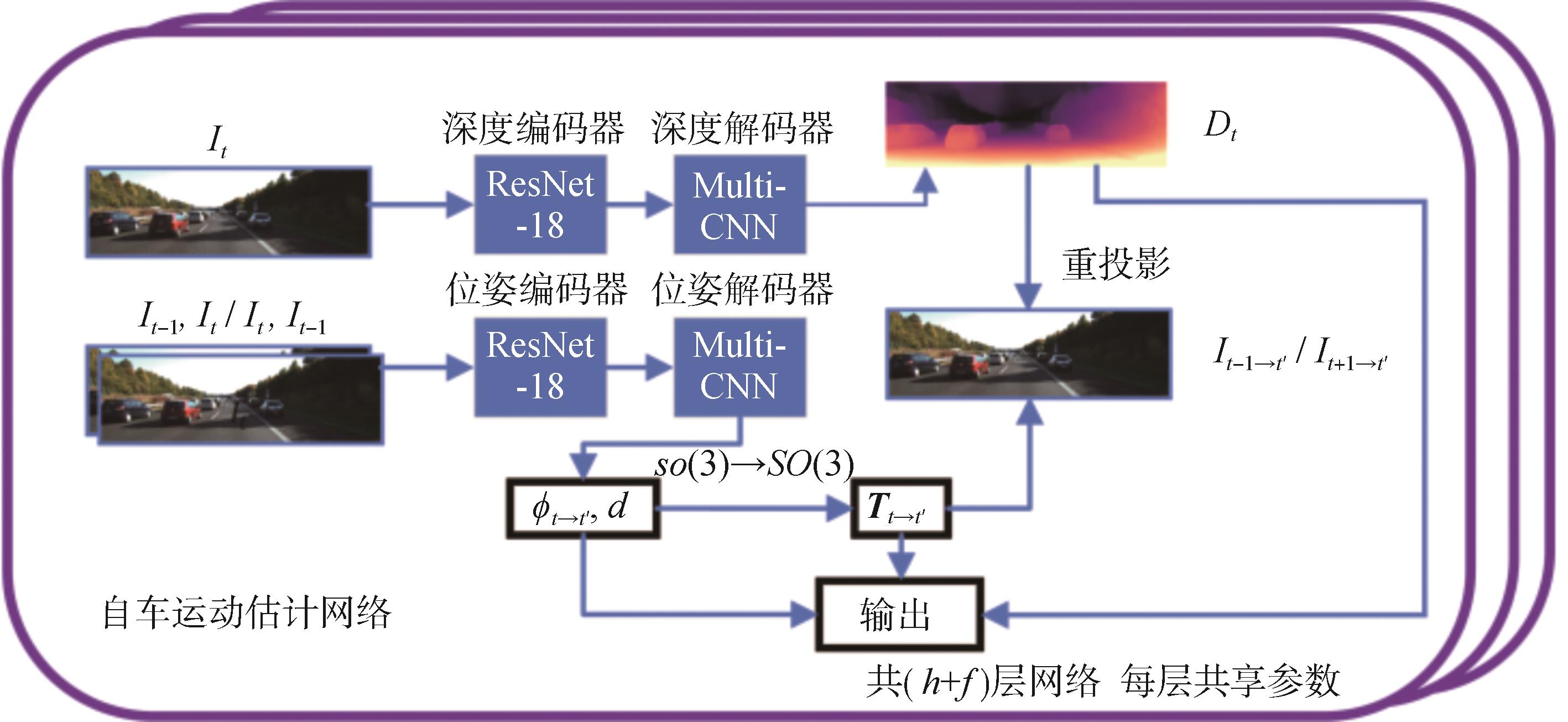
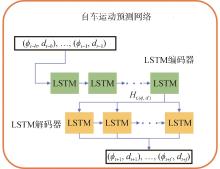
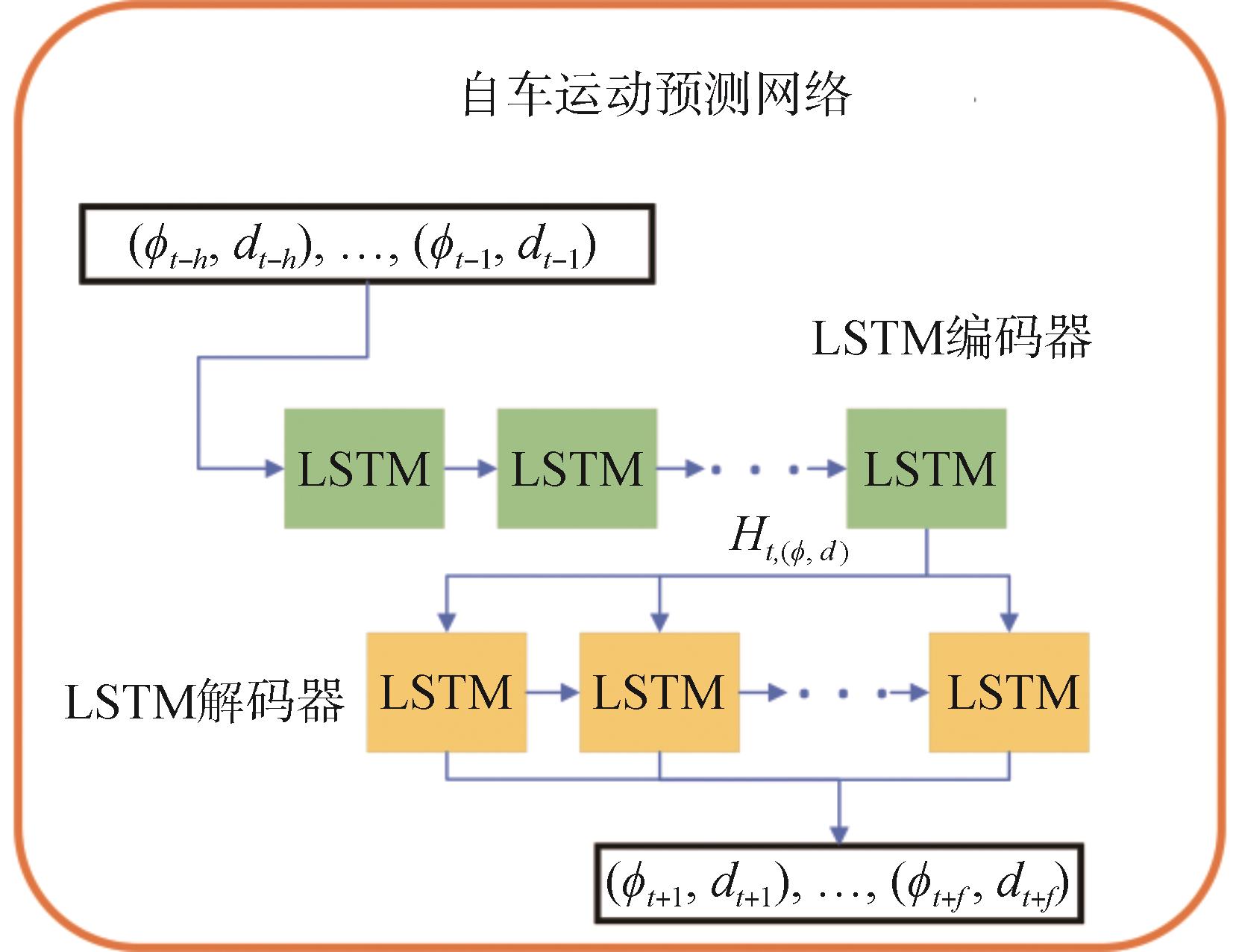
本文中基于低成本单目视觉感知系统,提出一种考虑自车运动影响的周边多目标轨迹预测方法。首先,建立了由深度估计网络和位姿估计网络构成的自车运动估计模型,实现图像序列中自车视觉里程计的有效计算;其次,利用自车历史位姿序列构建了预测模型,在自车相机当前视角下完成周边目标历史位置的归一化处理;最后,基于目标历史轨迹信息和区域图像信息构建了预测网络,实现智能汽车周边多目标运动轨迹的有效预测。本文的创新点是将视觉SLAM方法与轨迹预测模型相结合,提出了新的自车运动估计模型和基于ConvLSTM的多目标轨迹预测网络。所提模型克服了现有研究因忽视自车运动状态对周边目标轨迹预测精度带来的不利影响,并在仅使用单目视觉的感知条件下达到了较好的预测效果。公开数据集的测试表明,所提模型在1.5 s预测轨迹中心像素点的平均均方误差为321,比现有基线模型降低了52%,在对未来较长时步轨迹预测方面也具有优异表现。