汽车工程 ›› 2022, Vol. 44 ›› Issue (9): 1289-1304.doi: 10.19562/j.chinasae.qcgc.2022.09.001
所属专题: 智能网联汽车技术专题-规划&控制2022年
• • 下一篇
邵文博1,李骏1,张玉新2,王红1( )
)
收稿日期:2021-10-27
修回日期:2022-04-23
出版日期:2022-09-25
发布日期:2022-09-21
通讯作者:
王红
E-mail:hong_wang@tsinghua.edu.cn
基金资助:
Wenbo Shao1,Jun Li1,Yuxin Zhang2,Hong Wang1()
Received:2021-10-27
Revised:2022-04-23
Online:2022-09-25
Published:2022-09-21
Contact:
Hong Wang
E-mail:hong_wang@tsinghua.edu.cn
摘要:
由于性能局限、规范不足或可合理预见误用导致的预期功能安全问题层出不穷,严重阻碍了智能汽车的快速发展。本综述聚焦智能汽车预期功能安全保障关键技术,分别从系统开发、功能改进和运行3个阶段进行了系统的总结,最后从基础理论、风险防护和更新机制3方面进行了展望。本文可为智能汽车预期功能安全研究提供重要参考依据。
邵文博,李骏,张玉新,王红. 智能汽车预期功能安全保障关键技术[J]. 汽车工程, 2022, 44(9): 1289-1304.
Wenbo Shao,Jun Li,Yuxin Zhang,Hong Wang. Key Technologies to Ensure the Safety of the Intended Functionality for Intelligent Vehicles[J]. Automotive Engineering, 2022, 44(9): 1289-1304.

图 1
Uber路测无人车事故原因剖析"
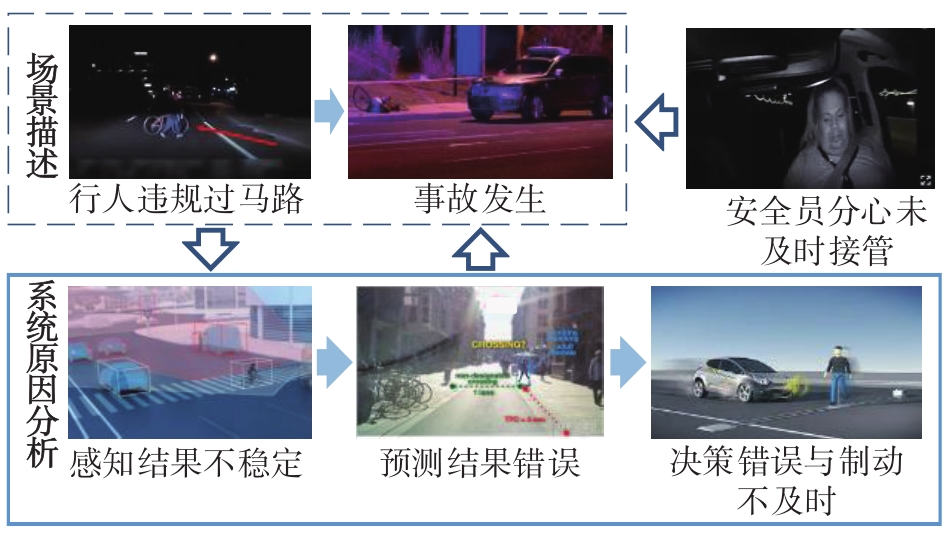
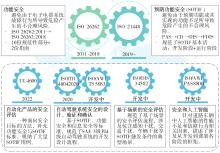
图 2
SOTIF相关标准"
图 3
SOTIF保障的基本活动流程[2]"

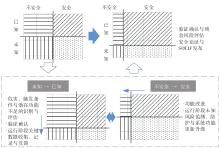
图 4
SOTIF保障目标与实现过程"

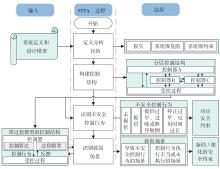
图 5
STPA技术实现过程"
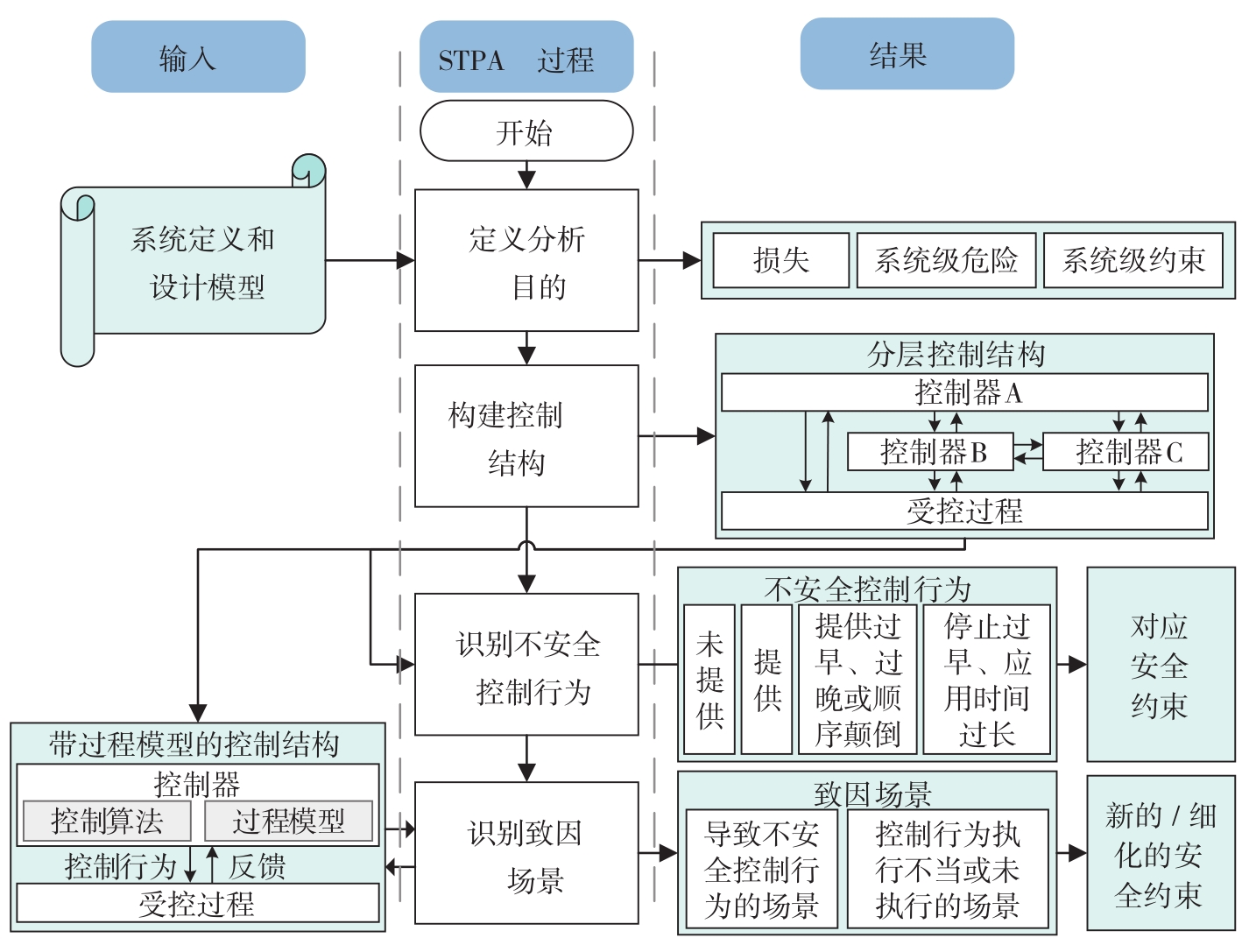
图 6
基于场景的测试方法与流程"

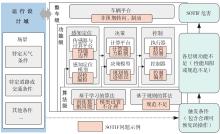
图 7
智能汽车各层级SOTIF问题"
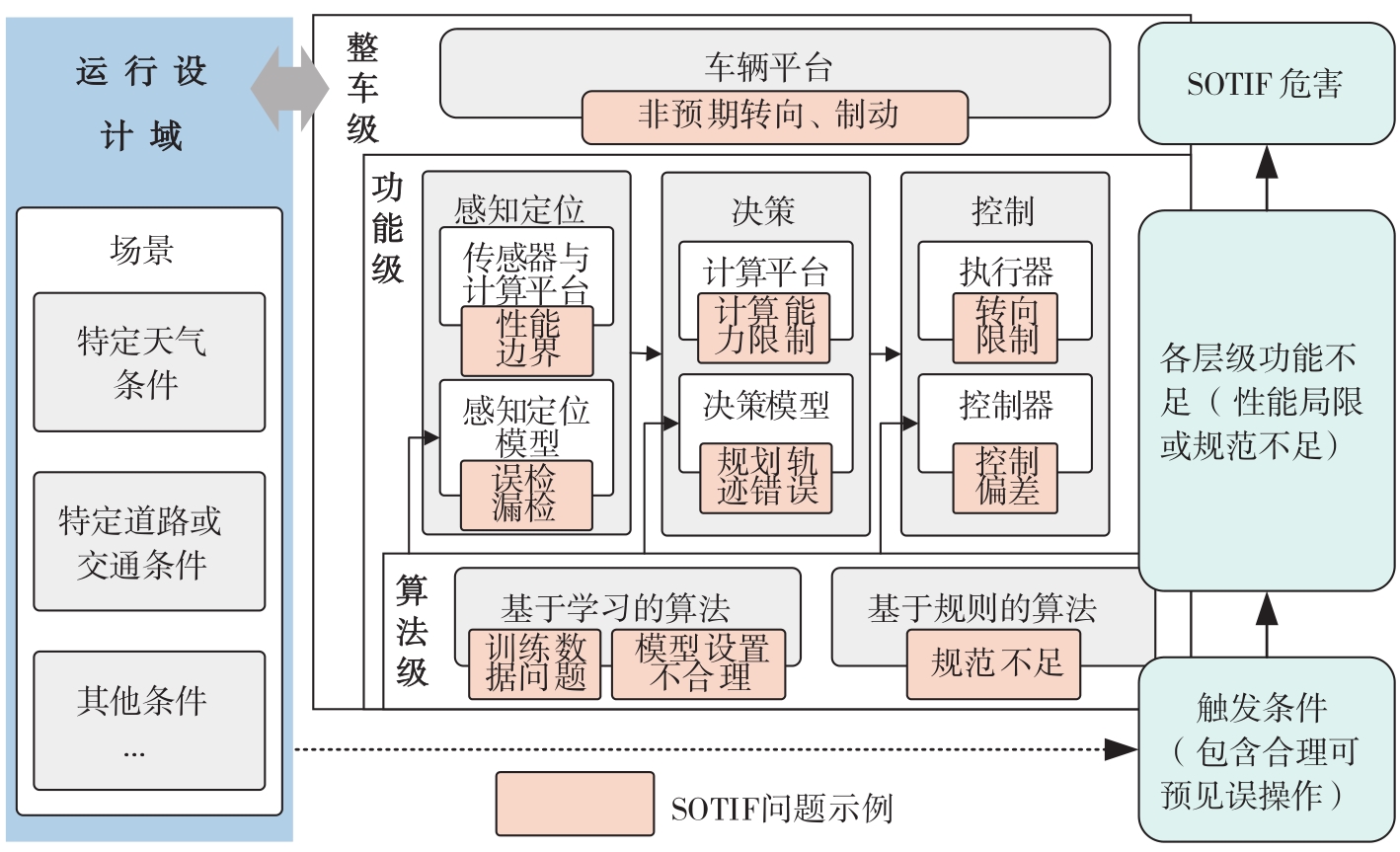

图 8
考虑预测不确定性的安全决策"
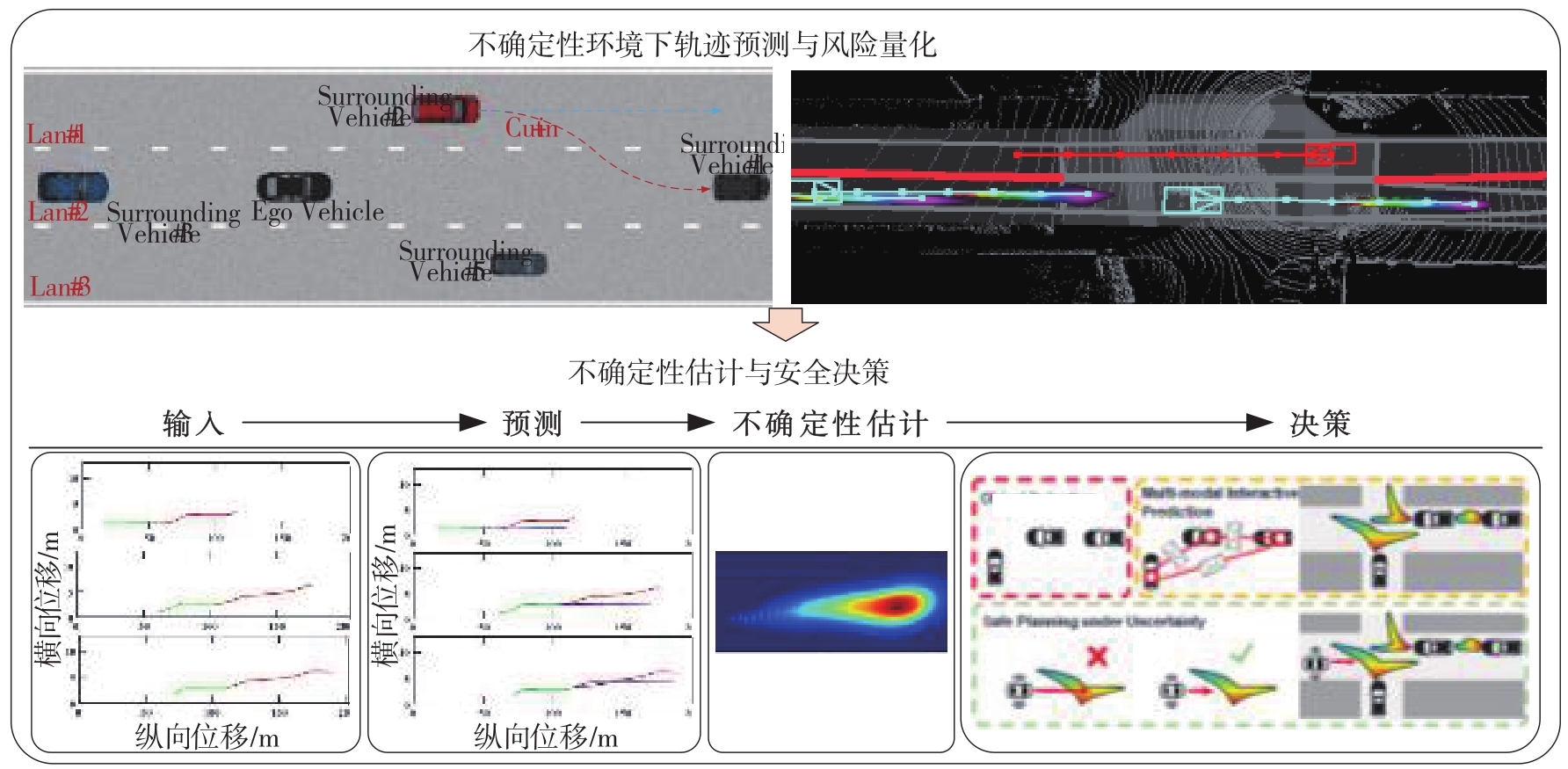
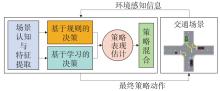
图 9
混合决策一般框架"
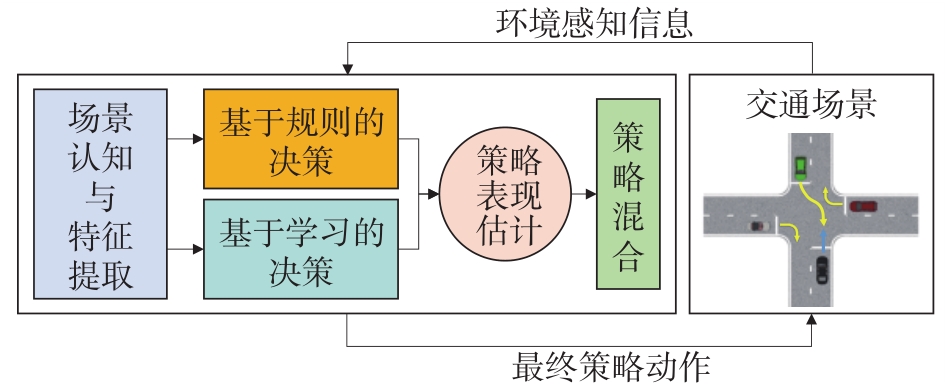

图 10
整车层SOTIF风险防护体系"

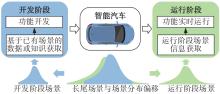
图 11
运行阶段未知风险源分析"
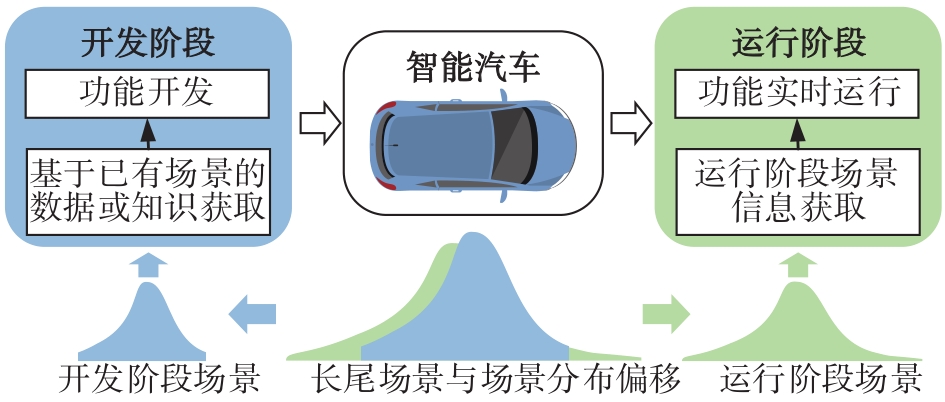
图 12
提取认知不确定性的典型方法"
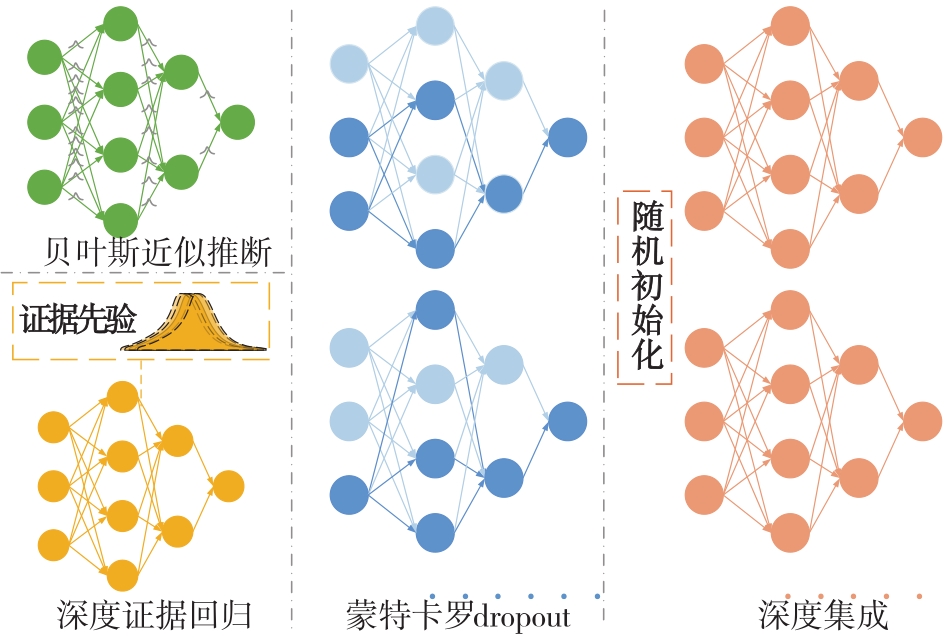
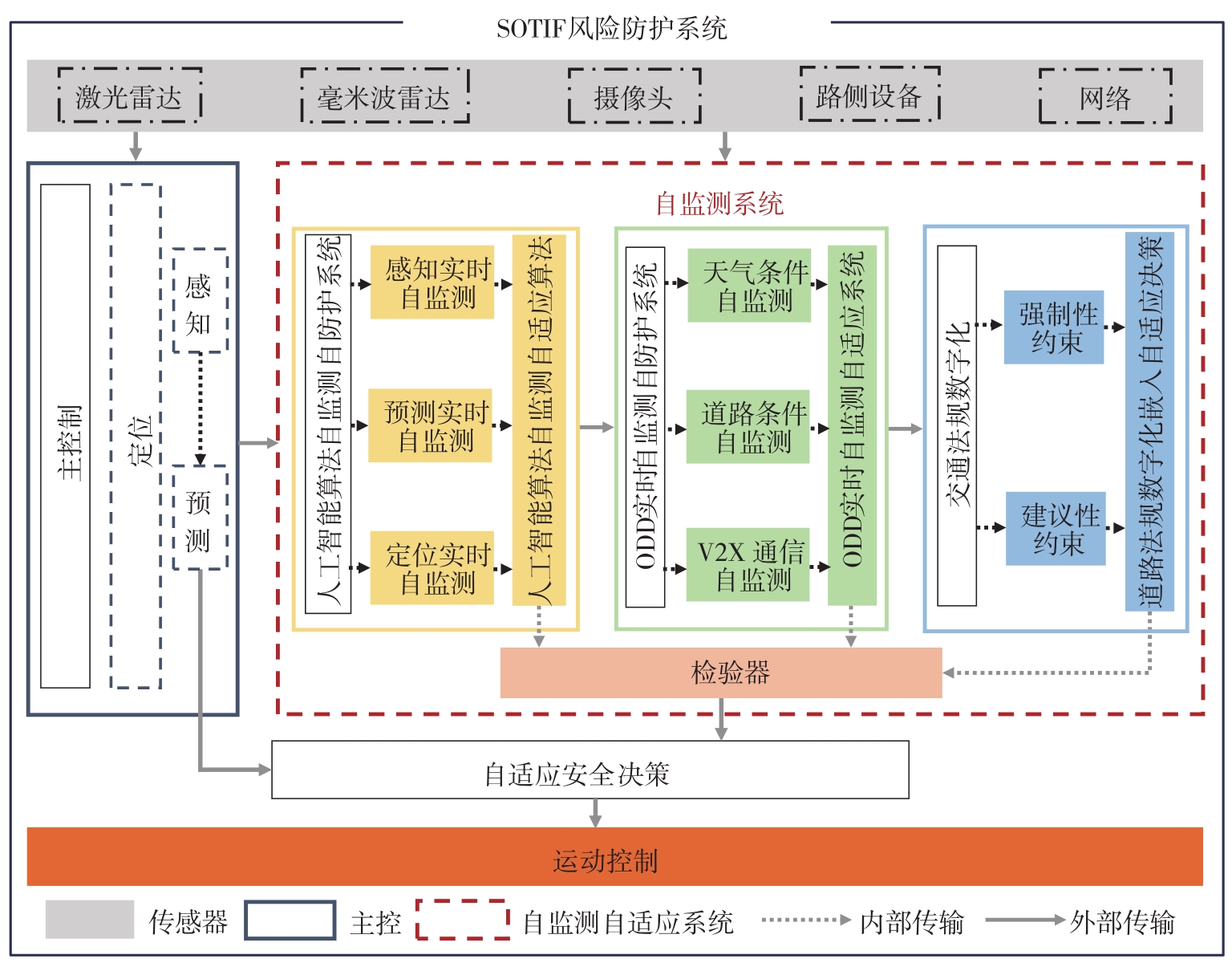
图 13
SOTIF风险防护系统"
| 1 | BOARD T. Collision between vehicle controlled by developmental automated driving system and pedestrian[J]. Tempe, Arizona, 2018: 78. |
| 2 | ISO. ISO/FDIS 21448 road vehicles — safety of the intended functionality[S]. Geneva, Switzerland: ISO: 2022. |
| 3 | ISO. ISO 26262 road vehicles — functional safety[S]. Geneva, Switzerland: ISO: 2018. |
| 4 | UL. UL 4600 safety for the evaluation of autonomous products[S]. 2020. |
| 5 | ISO. ISO/TR 4804:2020 road vehicles — safety and cybersecurity for automated driving systems — design, verification and validation[S]. Geneva, Switzerland: ISO: 2020. |
| 6 | ISO. ISO 34502 road vehicles — engineering framework and process of scenario-based safety evaluation[S]. 2018. |
| 7 | BMW. BMW safety assessment report[R].BMW GROUP, 2020. |
| 8 | BAIDU. Apollo pilot safety report[R].2018. |
| 9 | ABDULKHALEQ A, LAMMERING D, WAGNER S, et al. A systematic approach based on STPA for developing a dependable architecture for fully automated driving vehicles[J]. Procedia Engineering, 2017,179(Supplement C): 41-51. |
| 10 | KAISER B. An integrative solution towards SOTIF and AV safety[R].ANSYS, 2019. |
| 11 | WILLEMSEN D, SCHMEITZ A, FUSCO M. Enabling safe multi-brand platooning for Europe[R].European Commission, 2018. |
| 12 | BECKER C, BREWER J C, YOUNT L. Safety of the intended functionality of lane-centering and lane-changing maneuvers of a generic level 3 highway chauffeur system[R].National Highway Traffic Safety Administration, 2020. |
| 13 | JUNIETZ P, WACHENFELD W, KLONECKI K, et al. Evaluation of different approaches to address safety validation of automated driving[C]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2018. |
| 14 | NEUROHR C, WESTHOFEN L, BUTZ M, et al. Criticality analysis for the verification and validation of automated vehicles[J]. IEEE Access, 2021,9: 18016-18041. |
| 15 | STEIMLE M, WEBER N, MAURER M. Toward generating sufficiently valid test case results: a method for systematically assigning test cases to test bench configurations in a scenario-based test approach for automated vehicles[J]. IEEE Access, 2022,10: 6260-6285. |
| 16 | JACOBO A, NOBUYUKI U, KUNIO Y, et al. Development of a safety assurance process for autonomous vehicles in Japan[C]. Proceedings of ESV Conference, 2019. |
| 17 | LI Y, DUTHON P, COLOMB M, et al. What happens for a ToF LiDAR in fog?[J]. IEEE Transactions on Intelligent Transportation Systems, 2020,22(11): 6670-6681. |
| 18 | SCHÖNEMANN V, WINNER H, GLOCK T, et al. Fault tree-based derivation of safety requirements for automated driving on the example of cooperative valet parking[C]. 26th International Technical Conference on the Enhanced Safety of Vehicles (ESV), 2019. |
| 19 | KIROVSKII O M, GORELOV V A. Driver assistance systems: analysis, tests and the safety case. ISO 26262 and ISO PAS 21448[J]. IOP Conference Series: Materials Science and Engineering, 2019,534(1). |
| 20 | KRAMER B, NEUROHR C, BÜKER M, et al. Identification and quantification of hazardous scenarios for automated driving[C]. International Symposium on Model-Based Safety and Assessment. Springer, 2020. |
| 21 | NAGATSUKA T, MATSUMOTO T. Evaluation framework for performance limitation of autonomous systems under sensor attack[C]. International Conference on Computer Safety, Reliability, and Security. Springer, 2021. |
| 22 | 陈君毅, 刘力豪, 周堂瑞, 等. 城市自动驾驶决策系统安全分析与策略设计[J]. 同济大学学报(自然科学版), 2020,48(12): 1810-1817. |
| CHEN J Y,LIU L H,ZHOU T R, et al. Safety analysis and strategy design for decision system of urban autonomous driving vehicles[J]. Journal of Tongji University(Natural Science), 2020,48(12): 1810-1817. | |
| 23 | CAPITO L, REDMILL K A. Methodology for hazard identification and mitigation strategies applied to an overtaking assistant ADAS[C]. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC). IEEE, 2021. |
| 24 | XING X, ZHOU T, CHEN J, et al. A hazard analysis approach based on STPA and finite state machine for autonomous vehicles[C]. 2021 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2021. |
| 25 | ADEE A, GANSCH R, LIGGESMEYER P, et al. Discovery of perception performance limiting triggering conditions in automated driving[C]. 2021 5th International Conference on System Reliability and Safety (ICSRS). IEEE, 2021. |
| 26 | MARTIN H, WINKLER B, GRUBMÜLLER S, et al. Identification of performance limitations of sensing technologies for automated driving[C]. 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), 2019. |
| 27 | KHATUN M, GLAß M, JUNG R. Scenario-based extended hara incorporating functional safety and SOTIF for autonomous driving[C]. Proceedings of the 30th European Safety and Reliability Conference and 15th Probabilistic Safety Assessment and Management Conference, 2020. |
| 28 | SCHWALB E. Analysis of safety of the intended use (SOTIF)[R]. National Highway Traffic Safety Administration, 2019. |
| 29 | LURIE O, MILLER J. Hazard analysis and risk assessment beyond ISO 26262: management of complexity via parametrization [C]. SAE Paper 2018-01-1067. |
| 30 | JUNIETZ P, STEININGER U, WINNER H. Macroscopic safety requirements for highly automated driving[J]. Transportation Research Record, 2019,2673(3): 1-10. |
| 31 | KALRA N, PADDOCK S M. Driving to safety: how many miles of driving would it take to demonstrate autonomous vehicle reliability?[J]. Transportation Research Part A: Policy and Practice, 2016,94: 182-193. |
| 32 | RIEDMAIER S, PONN T, LUDWIG D, et al. Survey on scenario-based safety assessment of automated vehicles[J]. IEEE Access, 2020,8: 87456-87477. |
| 33 | HEJASE M, BARBIER M, OZGUNER U, et al. A validation methodology for the minimization of unknown unknowns in autonomous vehicle systems[C]. 2020 IEEE Intelligent Vehicles Symposium (IV), 2020. |
| 34 | BAGSCHIK G, MENZEL T, MAURER M. Ontology based scene creation for the development of automated vehicles[C]. 2018 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2018. |
| 35 | HUANG A, XING X, ZHOU T, et al. A safety analysis and verification framework for autonomous vehicles based on the identification of triggering events[C]. SAE Paper 2021-01-5010. |
| 36 | DING W, CHEN B, LI B, et al. Multimodal safety-critical scenarios generation for decision-making algorithms evaluation[J]. IEEE Robotics and Automation Letters, 2021,6(2): 1551-1558. |
| 37 | GOODFELLOW I J, SHLENS J, SZEGEDY C. Explaining and harnessing adversarial examples[J]. arXiv preprint arXiv:, 2014. |
| 38 | ZHANG S, PENG H, NAGESHRAO S, et al. Generating socially acceptable perturbations for efficient evaluation of autonomous vehicles[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, 2020. |
| 39 | HASIRLIOGLU S, RIENER A. A general approach for simulating rain effects on sensor data in real and virtual environments[J]. IEEE Transactions on Intelligent Vehicles, 2019,5(3): 426-438. |
| 40 | ÅSLJUNG D, NILSSON J, FREDRIKSSON J. Using extreme value theory for vehicle level safety validation and implications for autonomous vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2017,2(4): 288-297. |
| 41 | ZHAO D, HUANG X, PENG H, et al. Accelerated evaluation of automated vehicles in car-following maneuvers[J]. IEEE Transactions on Intelligent Transportation Systems, 2017,19(3): 733-744. |
| 42 | AKAGI Y, KATO R, KITAJIMA S, et al. A risk-index based sampling method to generate scenarios for the evaluation of automated driving vehicle safety[C]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC). IEEE, 2019. |
| 43 | KOREN M, ALSAIF S, LEE R, et al. Adaptive stress testing for autonomous vehicles[C]. 2018 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2018. |
| 44 | PONN T, MÜLLER F, DIERMEYER F. Systematic analysis of the sensor coverage of automated vehicles using phenomenological sensor models[C]. 2019 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2019. |
| 45 | MAHMUD S S, FERREIRA L, HOQUE M S, et al. Application of proximal surrogate indicators for safety evaluation: a review of recent developments and research needs[J]. IATSS Research, 2017,41(4): 153-163. |
| 46 | ZHAO T, YURTSEVER E, PAULSON J, et al. Automated vehicle safety guarantee, verification and certification: a survey[J]. arXiv preprint arXiv:, 2022. |
| 47 | SHALEV-SHWARTZ S, SHAMMAH S, SHASHUA A. On a formal model of safe and scalable self-driving cars[J]. arXiv preprint arXiv:, 2017. |
| 48 | TUNCALI C E, KAPINSKI J, ITO H, et al. Reasoning about safety of learning-enabled components in autonomous cyber-physical systems[C]. Proceedings of the 55th Annual Design Automation Conference, 2018. |
| 49 | JOHNSON B, HAVLAK F, KRESS GAZIT H, et al. Experimental evaluation and formal analysis of high‐level tasks with dynamic obstacle anticipation on a full‐sized autonomous vehicle[J]. Journal of Field Robotics, 2017,34(5): 897-911. |
| 50 | URBAN C, MINÉ A. A review of formal methods applied to machine learning[J]. arXiv preprint arXiv:, 2021. |
| 51 | BIRCH J, BLACKBURN D, BOTHAM J, et al. A structured argument for assuring safety of the intended functionality (SOTIF)[C]. International Conference on Computer Safety, Reliability, and Security. Springer, 2020. |
| 52 | ADEE A, MUNK P, GANSCH R, et al. Uncertainty representation with extended evidential networks for modeling safety of the intended functionality (SOTIF)[C]. European Safety and Reliability Conference (ESREL2020), 2020. |
| 53 | POST K, DAVEY C K. Integrating SOTIF and agile systems engineering[R]. SAE International, 2019. |
| 54 | SABERI A K, HEGGE J, FRUEHLING T, et al. Beyond SOTIF: black swans and formal methods[C]. 2020 IEEE International Systems Conference (SysCon), 2020. |
| 55 | COLLIN A, BILKA A, PENDLETON S, et al. Safety of the intended driving behavior using rulebooks[C]. 2020 IEEE Intelligent Vehicles Symposium (IV), 2020. |
| 56 | JAIN A, DEL PERO L, GRIMMETT H, et al. Autonomy 2.0: why is self-driving always 5 years away?[J]. arXiv preprint arXiv:, 2021. |
| 57 | WONG K, WANG S, REN M, et al. Identifying unknown instances for autonomous driving[C]. Proceedings of Machine Learning Research, 2020. |
| 58 | SHORTEN C, KHOSHGOFTAAR T M. A survey on image data augmentation for deep learning[J]. Journal of Big Data, 2019,6(1): 1-48. |
| 59 | KIM J, PARK C. End-to-end ego lane estimation based on sequential transfer learning for self-driving cars[C]. 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 2017. |
| 60 | DHANANJAYA M M, KUMAR V R, YOGAMANI S. Weather and light level classification for autonomous driving: dataset, baseline and active learning[C]. 2021 IEEE International Intelligent Transportation Systems Conference (ITSC). IEEE, 2021. |
| 61 | TREMBLAY M, HALDER S S, de CHARETTE R, et al. Rain rendering for evaluating and improving robustness to bad weather[J]. International Journal of Computer Vision, 2021,129(2): 341-360. |
| 62 | MIYATO T, MAEDA S, KOYAMA M, et al. Virtual adversarial training: a regularization method for supervised and semi-supervised learning[J]. IEEE transactions on pattern analysis and machine intelligence, 2018,41(8): 1979-1993. |
| 63 | KUTILA M, PYYKÖNEN P, JOKELA M, et al. Benchmarking automotive lidar performance in arctic conditions[C]. 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), 2020. |
| 64 | KIM Y G, LEE S H, KIM B S. Measurement of rainfall using sensor signal generated from vehicle rain sensor[J]. Journal of The Korean Society of Civil Engineers, 2018,38(2): 227-235. |
| 65 | HAURUM J B, BAHNSEN C H, MOESLUND T B. Is it raining outside? detection of rainfall using general-purpose surveillance cameras[C]. CVPR Workshops, 2019. |
| 66 | KLINGNER M, BAR A, MROSS M, et al. Improving online performance prediction for semantic segmentation[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021. |
| 67 | RAMANAGOPAL M S, ANDERSON C, VASUDEVAN R, et al. Failing to learn: autonomously identifying perception failures for self-driving cars[J]. IEEE Robotics and Automation Letters, 2018,3(4): 3860-3867. |
| 68 | BIJELIC M, GRUBER T, RITTER W. A benchmark for lidar sensors in fog: is detection breaking down?[C]. 2018 IEEE Intelligent Vehicles Symposium (IV), 2018. |
| 69 | ZANG S, DING M, SMITH D, et al. The impact of adverse weather conditions on autonomous vehicles: how rain, snow, fog, and hail affect the performance of a self-driving car[J]. IEEE Vehicular Technology Magazine, 2019,14(2): 103-111. |
| 70 | ZHANG H, PATEL V M. Densely connected pyramid dehazing network[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2018. |
| 71 | ZHANG H, SINDAGI V, PATEL V M. Image de-raining using a conditional generative adversarial network[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2019,30(11): 3943-3956. |
| 72 | HAO Z, YOU S, LI Y, et al. Learning from synthetic photorealistic raindrop for single image raindrop removal[C]. Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops, 2019. |
| 73 | INTELLIGENCE S S. Laser measurement systems technical description[R].2019. |
| 74 | HUANG S, LE T, JAW D. DSNet: joint semantic learning for object detection in inclement weather conditions[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021,43(8): 2623-2633. |
| 75 | POUS N, GINGRAS D, GRUYER D, et al. Intelligent vehicle embedded sensors fault detection and isolation using analytical redundancy and nonlinear transformations[J]. Journal of Control Science and Engineering, 2017,2017: 1763934. |
| 76 | PFEUFFER A, DIETMAYER K. Optimal sensor data fusion architecture for object detection in adverse weather conditions[C]. 2018 21st International Conference on Information Fusion (FUSION), 2018. |
| 77 | BIJELIC M, GRUBER T, MANNAN F, et al. Seeing through fog without seeing fog: deep multimodal sensor fusion in unseen adverse weather[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020. |
| 78 | SHAN M, NARULA K, WONG Y F, et al. Demonstrations of cooperative perception: safety and robustness in connected and automated vehicle operations[J]. Sensors, 2020,21(1): 200. |
| 79 | ZENG W, WANG S, LIAO R, et al. Dsdnet: deep structured self-driving network[C]. European Conference on Computer Vision. Springer, 2020. |
| 80 | LEE C W, NAYEER N, GARCIA D E, et al. Identifying the operational design domain for an automated driving system through assessed risk[C]. 2020 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2020. |
| 81 | BERNHARD J, POLLOK S, KNOLL A. Addressing inherent uncertainty: risk-sensitive behavior generation for automated driving using distributional reinforcement learning[C]. 2019 IEEE Intelligent Vehicles Symposium (IV), 2019. |
| 82 | CAMPO D, BAYDOUN M, MARIN P, et al. Learning probabilistic awareness models for detecting abnormalities in vehicle motions[J]. IEEE Transactions on Intelligent Transportation Systems, 2019,21(3): 1308-1320. |
| 83 | PEK C, MANZINGER S, KOSCHI M, et al. Using online verification to prevent autonomous vehicles from causing accidents[J]. Nature Machine Intelligence, 2020,2(9): 518-528. |
| 84 | LÜTJENS B, EVERETT M, HOW J P. Safe reinforcement learning with model uncertainty estimates[C]. 2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019. |
| 85 | GARCíA J, FERNÁNDEZ F. A comprehensive survey on safe reinforcement learning[J]. Journal of Machine Learning Research, 2015,16(1): 1437-1480. |
| 86 | 李克强, 常雪阳, 李家文, 等. 智能网联汽车云控系统及其实现[J]. 汽车工程, 2020,42(12): 1595-1605. |
| LI K Q, CHANG X Y, LI J W, et al. Cloud control system for intelligent and connected vehicles and its application[J]. Automotive Engineering, 2020,42(12): 1595-1605. | |
| 87 | WANG B, LUO Y, ZHONG Z, et al. Robust non-fragile fault tolerant control for ensuring the safety of the intended functionality of cooperative adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2022. |
| 88 | ZHANG Y, LINTERN G, GAO L, et al. A study on functional safety, SOTIF and RSS from the perspective of human-automation interaction[C]. SAE Paper 2021-01-0858. |
| 89 | ABBOOD H, AL-NUAIMY W, AL-ATABY A, et al. Prediction of driver fatigue[C]. Approaches and Open Challenges: 2014 14th UK Workshop on Computational Intelligence (UKCI). IEEE, 2014. |
| 90 | KOO J, KWAC J, JU W, et al. Why did my car just do that? explaining semi-autonomous driving actions to improve driver understanding, trust, and performance[J]. International Journal on Interactive Design and Manufacturing (IJIDeM), 2015,9(4): 269-275. |
| 91 | CHANDRA R, BHATTACHARYA U, RONCAL C, et al. Robusttp: end-to-end trajectory prediction for heterogeneous road-agents in dense traffic with noisy sensor inputs[C]. ACM Computer Science in Cars Symposium,2019. |
| 92 | SUN L, ZHAN W, CHAN C, et al. Behavior planning of autonomous cars with social perception[C]. 2019 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2019. |
| 93 | IVANOVIC B, LEE K, TOKMAKOV P, et al. Heterogeneous-agent trajectory forecasting incorporating class uncertainty[J]. arXiv preprint arXiv:, 2021. |
| 94 | IVANOVIC B, LIN Y, SHRIVASTAVA S, et al. Propagating state uncertainty through trajectory forecasting[J]. arXiv preprint arXiv:, 2021. |
| 95 | DENNIS L A, FISHER M. Verifiable self-aware agent-based autonomous systems[J]. Proceedings of the IEEE, 2020,108(7): 1011-1026. |
| 96 | RESCHKA A, BAGSCHIK G, ULBRICH S, et al. Ability and skill graphs for system modeling, online monitoring, and decision support for vehicle guidance systems[C]. 2015 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2015. |
| 97 | BAGSCHIK G, NOLTE M, ERNST S, et al. A system's perspective towards an architecture framework for safe automated vehicles[C]. 2018 21st International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2018. |
| 98 | NOLTE M, JATZKOWSKI I, ERNST S, et al. Supporting safe decision making through holistic system-level representations & monitoring--a summary and taxonomy of self-representation concepts for automated vehicles[J]. arXiv preprint arXiv:, 2020. |
| 99 | ULBRICH S, RESCHKA A, RIEKEN J, et al. Towards a functional system architecture for automated vehicles[J]. arXiv preprint arXiv:, 2017. |
| 100 | CHALAPATHY R, CHAWLA S. Deep learning for anomaly detection: a survey[J]. arXiv preprint arXiv:, 2019. |
| 101 | LOHDEFINK J, FEHRLING J, KLINGNER M, et al. Self-supervised domain mismatch estimation for autonomous perception[C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, 2020. |
| 102 | RICHTER C, ROY N. Safe visual navigation via deep learning and novelty detection[J]. Robotics: Science and Systems Foundation, 2017. |
| 103 | HENRIKSSON J, BERGER C, BORG M, et al. Towards structured evaluation of deep neural network supervisors[C]. 2019 IEEE International Conference on Artificial Intelligence Testing (AITest). IEEE, 2019. |
| 104 | HENRIKSSON J, BERGER C, BORG M, et al. Performance analysis of out-of-distribution detection on trained neural networks[J]. Information and Software Technology, 2021,130: 106409. |
| 105 | GAL Y, GHAHRAMANI Z. Dropout as a bayesian approximation[C]. Representing Model Uncertainty in Deep Learning: International Conference on Machine Learning, 2016. |
| 106 | LAKSHMINARAYANAN B, PRITZEL A, BLUNDELL C. Simple and scalable predictive uncertainty estimation using deep ensembles[C]. Advances in Neural Information Processing Systems, 2017. |
| 107 | AMINI A, SCHWARTING W, SOLEIMANY A, et al. Deep evidential regression[C]. Advances in Neural Information Processing Systems,2020. |
| 108 | KARPATHY A. Multi-task learning in the wilderness[EB/OL]. (2019-06-15)[2022-03-30]. https://slideslive.com/38917690/multitask-learning-in-the-wilderness. |
| 109 | SHAHEEN K, HANIF M A, HASAN O, et al. Continual learning for real-world autonomous systems: algorithms, challenges and frameworks[J]. arXiv preprint arXiv:, 2021. |
| [1] | 郝建平,苏炎召,钟志华,黄晋. 面向智能汽车的SOA架构及服务调度机制研究[J]. 汽车工程, 2023, 45(9): 1563-1572. |
| [2] | 吴思宇,于文浩,邢星宇,张玉新,李楚照,李雪轲,古昕昱,李云巍,马小涵,路伟,王政,郝圳茂,王红,李骏. 基于关键场景的预期功能安全双闭环测试验证方法[J]. 汽车工程, 2023, 45(9): 1583-1607. |
| [3] | 赵高士,陈龙,蔡英凤,廉玉波,王海,刘擎超,滕成龙. 融合复杂网络和记忆增强网络的轨迹预测技术[J]. 汽车工程, 2023, 45(9): 1608-1616. |
| [4] | 白先旭,左瑜,李维汉,石琴,李楚照,赵树廉,陈炯. 自动紧急制动系统控制模块的SOTIF量化评价[J]. 汽车工程, 2023, 45(9): 1655-1665. |
| [5] | 吴新政,邢星宇,刘力豪,沈勇,陈君毅. 基于错误注入的决策规划系统抗扰性测试与分析[J]. 汽车工程, 2023, 45(8): 1428-1437. |
| [6] | 胡启慧,蔡英凤,王海,陈龙,董钊志,刘擎超. 基于层次图注意的异构多目标轨迹预测方法[J]. 汽车工程, 2023, 45(8): 1448-1456. |
| [7] | 高翔,陈龙,王歆叶,熊晓夏,李祎承,陈月霞. 基于轨迹预测的智能汽车行驶风险评估方法[J]. 汽车工程, 2023, 45(4): 588-597. |
| [8] | 胡杰,朱琪,陈锐鹏,张敏超,张志豪,刘昊岩. 引入必经点约束的智能汽车全局路径规划[J]. 汽车工程, 2023, 45(3): 350-360. |
| [9] | 张紫微,郑玲,李以农,乔旭强,郑浩,王戡. 考虑前车运动不确定性的多目标自适应巡航控制[J]. 汽车工程, 2023, 45(3): 361-371. |
| [10] | 刘正发,吴亚,刘佩根,顾荣琦,陈广. 基于特征和标签联合分布匹配的智能驾驶跨域自适应目标检测[J]. 汽车工程, 2023, 45(11): 2082-2091. |
| [11] | 赵树廉,来飞,李克强,陈涛,孟璋劼,唐逸超,吴思宇,田浩东. 基于数字孪生技术的智能汽车测试方法研究[J]. 汽车工程, 2023, 45(1): 42-51. |
| [12] | 段顺昌,白先旭,石琴,李维汉,何冠男. 汽车自动紧急制动系统控制策略的预期功能安全设计[J]. 汽车工程, 2022, 44(9): 1305-1317. |
| [13] | 汪梓豪,蔡英凤,王海,陈龙,熊晓夏. 基于单目视觉运动估计的周边多目标轨迹预测方法[J]. 汽车工程, 2022, 44(9): 1318-1326. |
| [14] | 赵超,卜德旭,曹礼鹏,李克强,罗禹贡. 强降雨场景下自适应巡航控制系统的安全控制策略[J]. 汽车工程, 2022, 44(8): 1117-1125. |
| [15] | 梁旺,秦兆博,陈亮,边有钢,胡满江. 基于改进BP神经网络的智能车纵向控制方法[J]. 汽车工程, 2022, 44(8): 1162-1172. |
|